创新点:
-
- 移除分布焦点损失(DFL)
-
- nms free
-
- C3k2模块更新
-
- ProgLoss(渐进损失平衡) 与 STAL(小目标感知标签分配)
-
- MuSGD
相关技术
解耦检测头
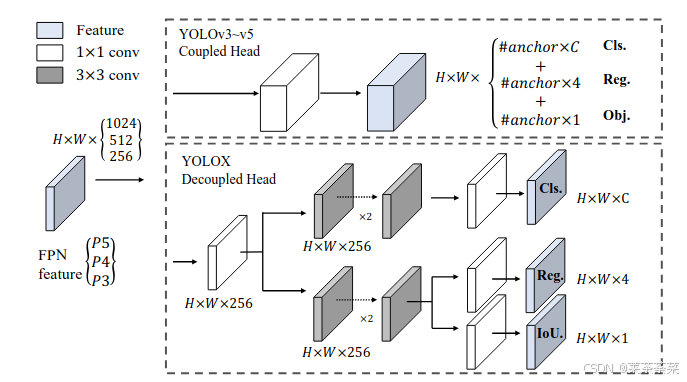
早期yolo(v1/v2/v3/v4/v5)使用的是耦合检测头:
- 同一个卷积层输出类别概率与边框回归参数。
- 分类与回归共享特征,并用同一个 Head 网络处理输出。
- 这种设计简单但无法最好地兼顾分类与几何回归任务需求。
Revisiting the Sibling Head in Object Detector(CVPR 2020)指出传统 sibling head(耦合在同一个 Head 上预测分类和定位)存在 空间冲突(spatial misalignment) 问题,并引入 task-aware spatial disentanglement(TSD)来实质上 decouple 两个任务的特征:该思想从目标检测 Head 的空间特性角度提出了解耦需要:分类更关注语义中心特征,而定位更关注边界或几何信息。
YOLO系列中,YOLOX最早明确提出并应用 Decoupled Head:在预测输出端将分类分支和边框回归分支分离出来(如下图)。
作者指出:解耦 Head 有助于提升精度和收敛速度,并在 YOLOv3 基线的实验中显著提高了性能。
无锚框预测
YOLO系列中YOLOX率先使用anchor_free。加之上面提到的解耦head,anchor_free 也会更加稳定。之前的v2-v5中,回归任务回归的都是anchor → GT box 的偏移量
之前有锚框回归过程:
网络输出:tx, ty, tw, th
bx=(sigmoid(tx)+cx)∗strideb_x = (sigmoid(t_x) + c_x) * stridebx=(sigmoid(tx)+cx)∗stride
by=(sigmoid(ty)+cy)∗strideb_y = (sigmoid(t_y) + c_y) * strideby=(sigmoid(ty)+cy)∗stride
bw=anchorw∗exp(tw)b_w = anchor_w * exp(t_w)bw=anchorw∗exp(tw)
bh=anchorh∗exp(th)b_h = anchor_h * exp(t_h)bh=anchorh∗exp(th)
有没有小伙伴和我一样 对于box的xy的回归很容易回想起来,w,h却总是忘记为什么求指数。我们按当年设计者的思路一步步复原为什么这么算。
首先为什么设计时要用:tw=log(bw/anchorw)t_w = log(b_w/anchor_w)tw=log(bw/anchorw),而不是bw=anchorw+twb_w = anchor_w + t_wbw=anchorw+tw 或者 bw=anchorw∗twb_w = anchor_w * t_wbw=anchorw∗tw?
第一:预测框的宽高必须为正,如果bw=anchorw+twb_w = anchor_w + t_wbw=anchorw+tw,tw<−anchorwt_w < -anchor_wtw<−anchorw, bwb_wbw就小于零了,而bw=anchorw∗exp(tw)b_w = anchor_w * exp(t_w)bw=anchorw∗exp(tw)恒为正。
第二:希望学到的是相对尺度变化,梯度随尺度自适应,多尺度特征下分布稳定
L=∣tpredw−log(GTw/anchorw)∣L = |t^w_{pred} - log(GT_w / anchor_w)|L=∣tpredw−log(GTw/anchorw)∣
同一类别在不同尺度层(P3 / P4 / P5)上,回归分布一致
 回归目标近似服从 0 均值分布,非常适合 L1 / Smooth-L1
回归目标近似服从 0 均值分布,非常适合 L1 / Smooth-L1
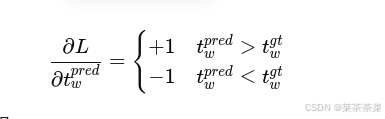
第三:梯度要好训
加法模型bw=anchorw+tw;∂bw/∂tw=1b_w = anchor_w + t_w ;∂b_w/∂t_w = 1bw=anchorw+tw;∂bw/∂tw=1,大框 / 小框回归梯度相同 → 不稳定
乘法模型bw=anchorw∗tw;twb_w = anchor_w * t_w ;t_wbw=anchorw∗tw;tw 必须 > 0(又要约束),小于 1 的尺度压缩非常难学
无锚框的回归过程:
l=x−xleftl = x - x_{left}l=x−xleft
r=xright−xr = x_{right} - xr=xright−x
这些量:天然 ≥ 0,本身就是"几何距离"
DFL(分布焦点损失)
DFL是一种用离散分布回归连续距离的回归建模方式,以YOLOX为例,回归的是l, t, r, b (像素距离),loss为IoU / GIoU / L1。
核心思想
把一个连续距离,拆成「若干离散 bin 的概率分布」
例如:
最大回归距离:reg_max = 16,不再预测一个l ,而是预测一个长度为 17 的向量:
P(l = 0), P(l = 1), ..., P(l = 16)
lbtr各自计算期望(Expectation),例如对l
然后对ltrb求和
优点
- 传统的回归是直接预测一个实数
- 梯度高度依赖预测误差
- 对边界不确定性建模能力弱
DFL 和 Anchor-free 天然契合
- ltrb 天然 ≥ 0
- 有合理上界
- 距离有"离散感"(像素)
DFL 带来的好处
- 回归更稳定(尤其 early stage)
- 对模糊边界更鲁棒
- 和 IoU loss 互补
- AP 有稳定增益(尤其 AP75)
AP75 是什么? IoU ≥ 0.75 的平均精度,AP 用的是:Precision / Recall
YOLO-26 的回归目标已经不是"像素精度优先",YOLO-26 的核心设计目标是:NMS-free + 匈牙利匹配 + 全局最优分配。
在这个体系里:一个 GT 通常只匹配 1 个预测,不再需要大量候选框"拼精度"
DFL 的优势:"在大量候选中,把边界磨得更准"
而 YOLO-26:"我要的是全局最优的一对一匹配",优化目标不同了
匈牙利匹配使用的 cost 通常是:cost = cls_cost + box_cost (L1 / IoU)
而 DFL:回归的是分布,loss 是分类型交叉熵,与 box L1 / IoU 是"异构目标"
nms free技术
在训练阶段就实现一对一预测,而实现不用nms的技术
传统yolo步骤
输出很多候选框 → 通过规则筛选 → NMS 去重 → 最终预测框
每个 anchor / 每个 grid cell 输出:
| 输出 | 说明 |
|---|---|
bbox = (x, y, w, h) |
回归框 |
obj_conf |
是否包含物体(objectness score) |
class_conf[C] |
类别概率 |
通常在推理阶段计算:
score=objconf×classconfscore=obj_{conf}×class_{conf}score=objconf×classconf
首先:进行置信度筛选 :score < confthreshconf_{thresh}confthresh → 丢弃, 只保留高置信度候选框, 筛掉绝大部分背景框。
接着:NMS (同类别去重)
按 score 排序;对每个类别单独取最高 score 框;删除与它 IoU > nms_thresh 的其余框;迭代直到没有候选框
YOLO26的处理步骤:
每个 grid cell / anchor-free 位置输出:
| 输出 | 说明 |
|---|---|
ltrb 或 (x, y, w, h) |
回归框 |
class_conf[C] |
类别概率 |
候选点筛选
只考虑 GT 中心区域内的预测点,其他位置全部负样本
计算 cost / alignment metric
SimOTA:
cost=clsloss+λ⋅IoUlosscost=cls_{loss}+λ⋅IoU_{loss}cost=clsloss+λ⋅IoUloss
Task-Aligned:
align=(pcls)α⋅(IoU)β(p_{cls})^α⋅(IoU)^β(pcls)α⋅(IoU)β
Task-Aligned 直接考虑最终得分与框质量对齐
选 top-K(通常 1-3 个)
GT 只分配给最优预测,其余候选点为负样本,这一步让训练天然"一物一框",减少重复预测
推理时
score = class_{conf} × IoU_{pred} ,丢掉低置信框, 每个位置只输出一个框,每张图 Top-K 限制输出数
无需 NMS
因为训练时已经让每个 GT 只有一个高质量框
| 名称 | 核心改进 | 每步动作 |
|---|---|---|
| SimOTA | 动态选正样本数 K(每个 GT 可以有 1~K 个正样本) | 1. 候选预测点(中心区域) 2. 计算 cost = clsloss+IoUlosscls_{loss} + IoU_{loss}clsloss+IoUloss 3. top-K cost 最低的点分配给 GT |
| Task-Aligned | 对齐预测得分和正样本选择(NMS-Free 必需) | 1. 候选预测点 2. 计算 alignment = (clsconf)α∗IoUβ(cls_{conf})^α * IoU^β(clsconf)α∗IoUβ 3. top-K alignment 最大的点分配给 GT 4. 其余负样本 |
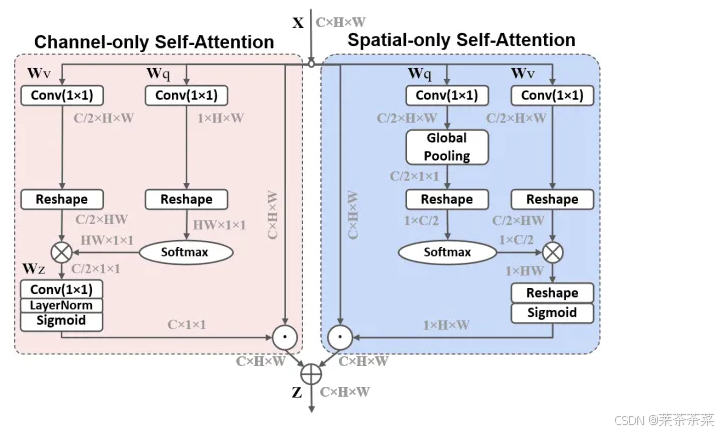
PSA模块
C3k2模块
yolov11:
Backbone
├─ Conv
├─ C2f / C3
├─ PSA ← 插在 stage 末尾(较粗粒度)
yolo26PSA 被下沉到 C3k2 Block 内部,变成了"结构性分支"
新C3K2
Input
├─ Bottleneck 分支(局部、几何)
├─ PSA 分支 (全局、注意力) ← 新加
└─ Concat + Conv
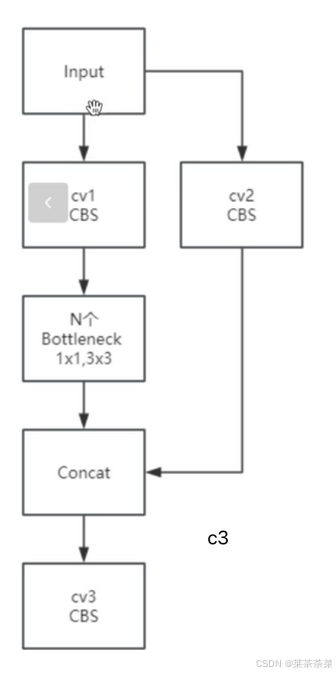
上图是传统c3网络,下面是yolo26的改进
Input
├─ cv1 → Bottleneck × N ┐
├─ cv2 ───────────┼─ Concat → cv3
└─ PSA ───────────┘
为什么要这么做呢,有什么优势?
动机 1 :局部几何 + 全局语义解耦
Bottleneck:→ 边缘 / 形状 / 几何
PSA:→ 目标整体 / 上下文 / 位置关系,并行比串行更稳定
动机 2 :替代 DFL 之后,回归更吃"结构感"
YOLOv26 取消 DFL,用连续回归
那就意味着:模型更依赖特征本身的几何一致性,PSA 在 block 级别提供"全局约束"
动机 3 :为 anchor-free 回归提供全局参考
anchor-free 的 ltrb 回归:l, t, r, b = f(feature),PSA 能显著减少:局部歧义、尺度漂移、边界不一致
Bottleneck它学到的结构是:
- 边缘连续
- 局部纹理一致
- 邻域几何平滑
- 它只知道:"我附近长得像什么"
DFL 被移除之后,少掉的是「隐式几何约束」,PSA提供的是「目标级空间先验」,即"哪些空间位置,应该在当前 feature 中被整体关注 ",这隐含了一个非常重要的信息:目标的"空间占据范围",这正是回归所缺失、而 Bottleneck 无法提供的。
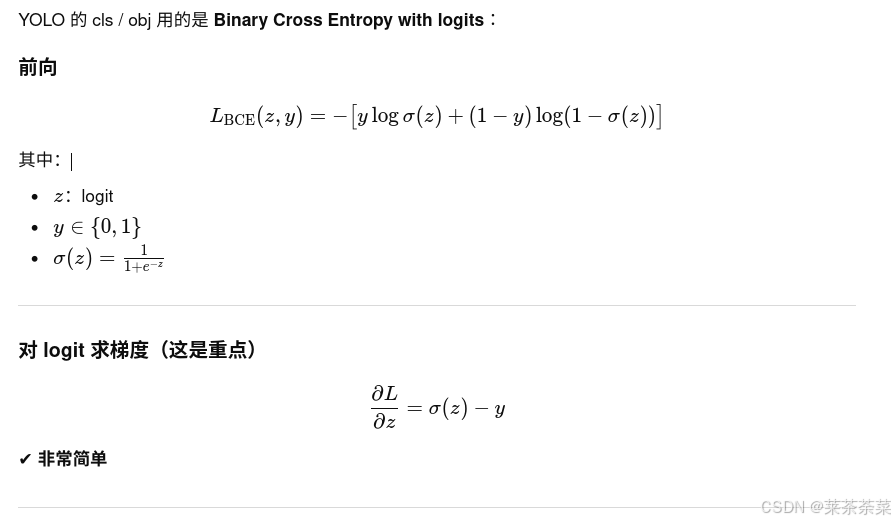
ProgLoss(渐进损失平衡)
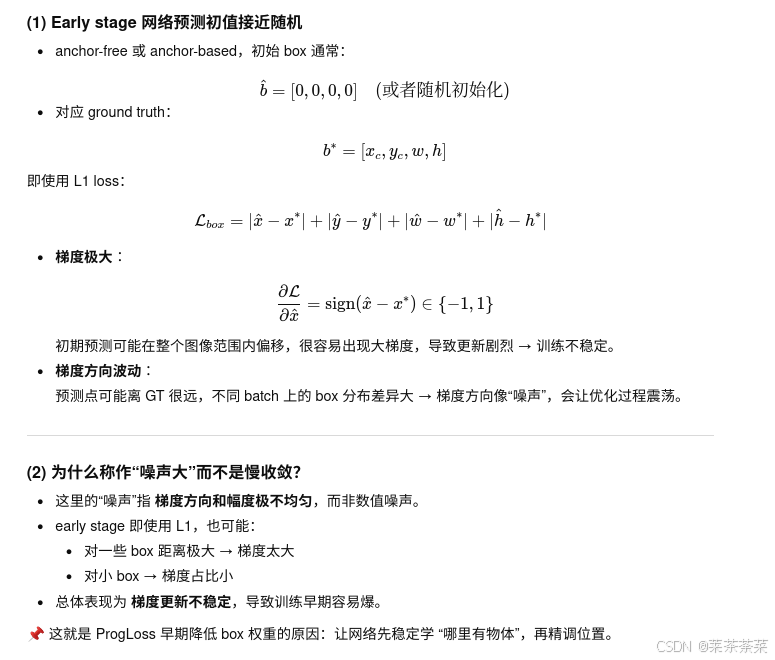
在目标检测(尤其是 YOLO / anchor-free)中,损失项本身是异构的:
L=λclsLcls+λboxLbox+λobjLobjλ_{cls}L_{cls}+λ_{box}L_{box}+λ_{obj}L_{obj}λclsLcls+λboxLbox+λobjLobj
它的问题是:
1.固定 loss 权重
- early stage:box 回归噪声极大 → box loss 主导梯度
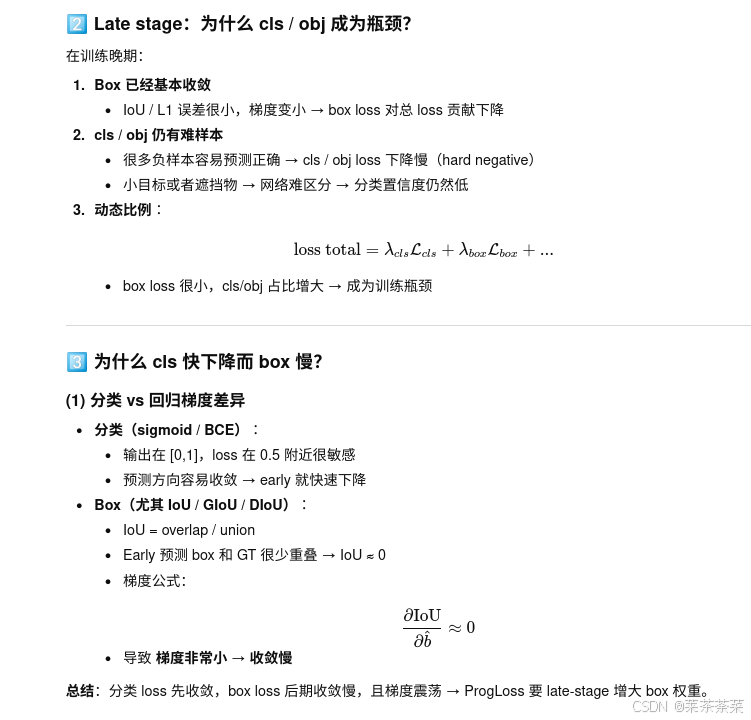
- late stage:cls / obj 成为瓶颈
2.不同 loss 收敛速度不同
- cls 很快下降
- box(尤其 IoU 系)下降慢、梯度不稳定
3.正负样本比例随训练动态变化
- 初期:正样本稀疏,objectness 极难
- 后期:大量 easy negative
以 YOLO 的 obj / cls 为例:每一个 grid,每一个 stride,每一个正样本 + 大量负样本, 几乎所有位置都会产生梯度。
而 box 回归是:只有 正样本,且 IoU 有 threshold / assign,BCE 是"全图参与反向传播",回归是"稀疏参与"。
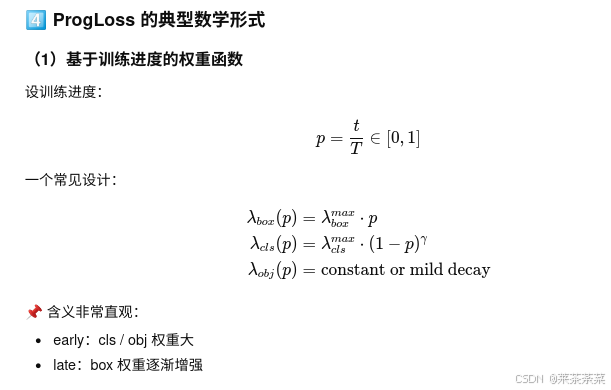
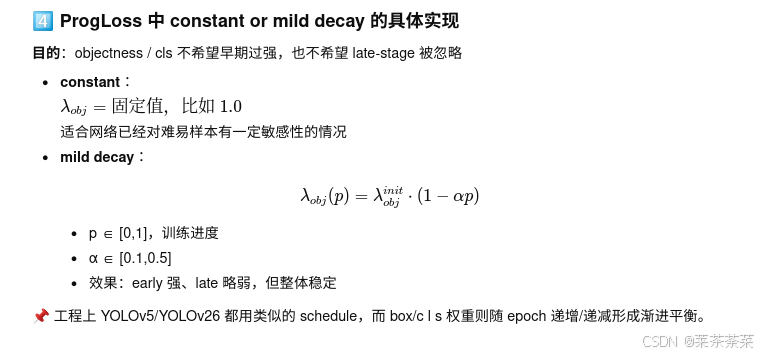
ProgLoss是在不同训练阶段,自动调整各 loss 的"话语权"
| 阶段 | 网络能力 | 主要目标 |
|---|---|---|
| Early | 表达能力弱 | 先学"在哪里有物体" |
| Mid | 定位逐渐稳定 | 精调 box |
| Late | 定位稳定 | 提升分类与置信度 |
| 阶段 | Loss 特性 | 为什么噪声/瓶颈 | ProgLoss 处理 |
|---|---|---|---|
| Early | box L1 / IoU 大梯度 | 初始预测离 GT 远 → 梯度方向不稳定 | 降低 λ_box,先学 obj/cls |
| Mid | box 与 cls 平衡 | box 开始收敛,cls 下降 | 动态 λ_box 上升 |
| Late | box 小梯度,cls/obj 瓶颈 | hard negative、IoU 梯度小 | λ_box 保持高,λ_cls/obj mild decay |
STAL(小目标感知标签分配)
STAL 本质不是"给小目标更多正样本",
而是:在 label assignment 阶段,改变"什么叫好预测"的判据,使小目标不再被 IoU / 尺度偏置系统性压制。
-
小目标:
- IoU 波动大 → cost 大
- 更容易被挤出 Top-k
-
大目标:
- IoU 稳 → 稳定进入正样本
不是模型不学小目标,而是 label assignment 阶段就"不给资格"
于是 STAL 引入 size-aware 的 assignment 机制:
GT 越小: IoU 权重 ↓ 几何/中心/尺度一致性权重 ↑ 正样本覆盖范围 ↑
YOLOv26 的 STAL 并不是单一 trick,而是 三层协同设计:
-
小目标感知的 cost 重加权(最核心)
设 GT 尺度:
s=w⋅h
归一化:
shat=s/srefs_{hat}= s/s_{ref}shat=s/sref定义 小目标权重函数(示意):
ω(s)=clamp(1/(shat+ϵ),ωmax)ω(s)=clamp(1/(s_{hat}+ϵ),ω_{max})ω(s)=clamp(1/(shat+ϵ),ωmax)
结果:目标越小,ω 越大

IoU 的"杀伤力"被 size factor 抑制了 -
小目标的正样本 Top-k 自适应扩大
在 TAL 中:每个 GT 选 Top-k predictions(通常 k=10)
STAL 中:
k(s)=kbase⋅ω(s);k(s)=k_{base}⋅ω(s);k(s)=kbase⋅ω(s);目标尺度 k 大目标 10 中目标 15 小目标 20~30 这样就相当于小目标有了召回补偿,扩大候选集合。
-
中心一致性 / 几何先验的显式引入
对于小目标惩罚更重 :大目标:偏 2px → 相对位置变化很小
小目标:偏 2px → 可能直接错位
ProgLoss:loss 权重在变
STAL:正样本结构在变
MuSGD
YOLOv26 同时做了三件会破坏优化稳定性的事:
- 取消 DFL → box 回归从"分布期望"变成"连续值",early 梯度方向抖动明显
- STAL → 正样本集合随 GT 尺度动态变化,每个 iter 的梯度统计分布在变
- ProgLoss → loss 权重随训练进度变化,同一参数在不同阶段"被谁驱动"不一样
梯度分布是强非平稳的,固定 μ 的 SGD / AdamW 都会出现问题。
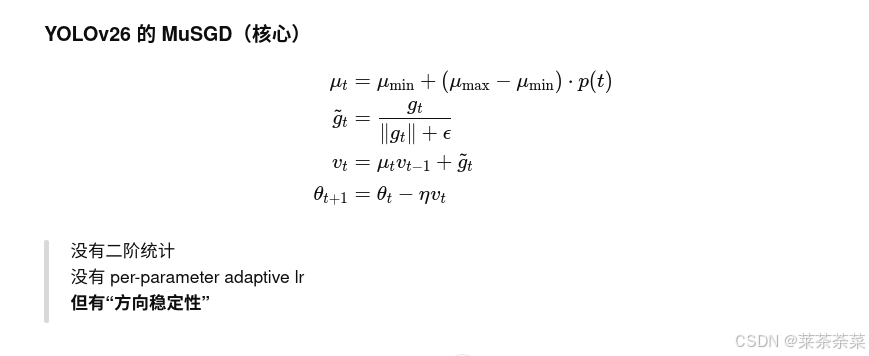
MuSGD的优化:
- 动量 μ 是随训练进度调度的
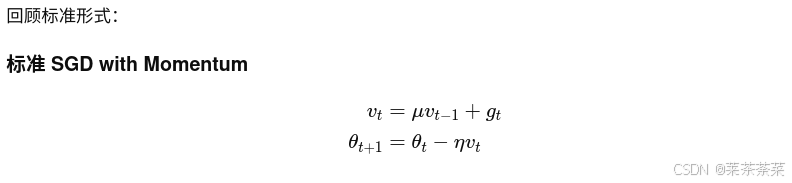
不像之前的固定 momentum= 0.9,yolo26中:
μ(t)=μmin+(μmax−μmin)⋅p(t),p=T/tμ(t)=μ_{min}+(μ_{max}−μ_{min})⋅p(t), p=T/tμ(t)=μmin+(μmax−μmin)⋅p(t),p=T/t
| 阶段 | μ | 原因 |
|---|---|---|
| early | 小 | 梯度方向噪声大,不要"记仇" |
| mid | 上升 | 方向开始稳定 |
| late | 大 | 平滑收敛、防抖 |
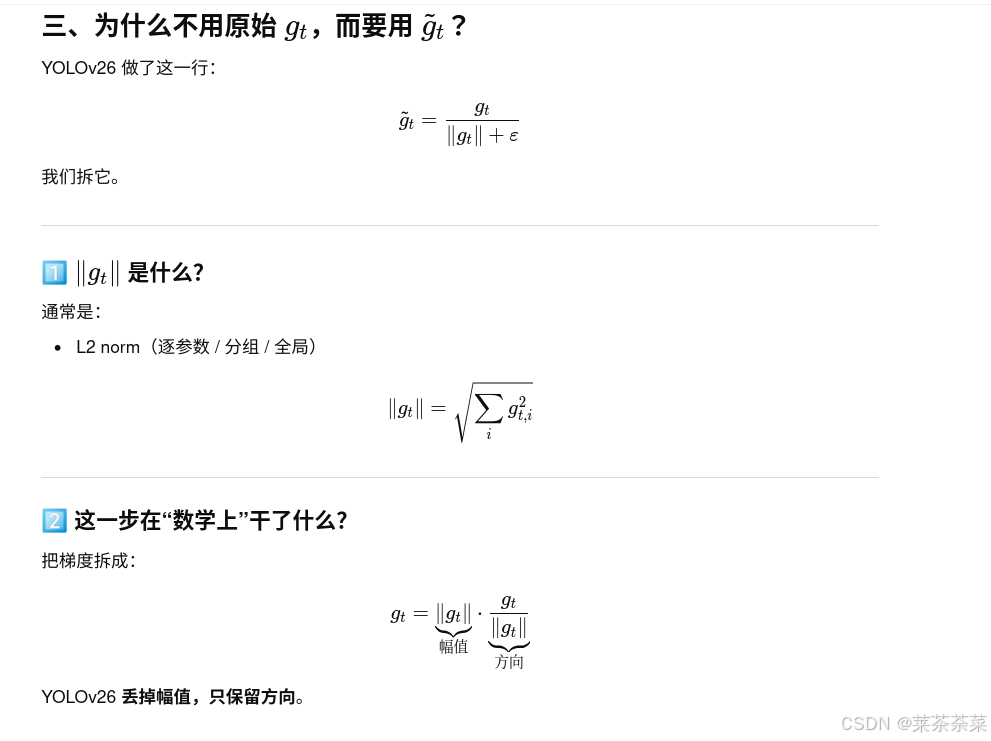
- 梯度幅值去敏(Magnitude-Unified)
YOLOv26 中不是直接用 gtg_tgt,而是:
| 项 | BCE(cls/obj) | box / IoU |
| --------- | ------------ | --------- |
| 参与位置 | 全图 | 仅正样本 |
| 梯度符号 | 稳定 | 易翻转 |
| 梯度是否连续 | ✔ | ❌(IoU 截断) |
| early 稳定性 | 高 | 低 |
所以 late stage 的瓶颈一定在 cls / obj
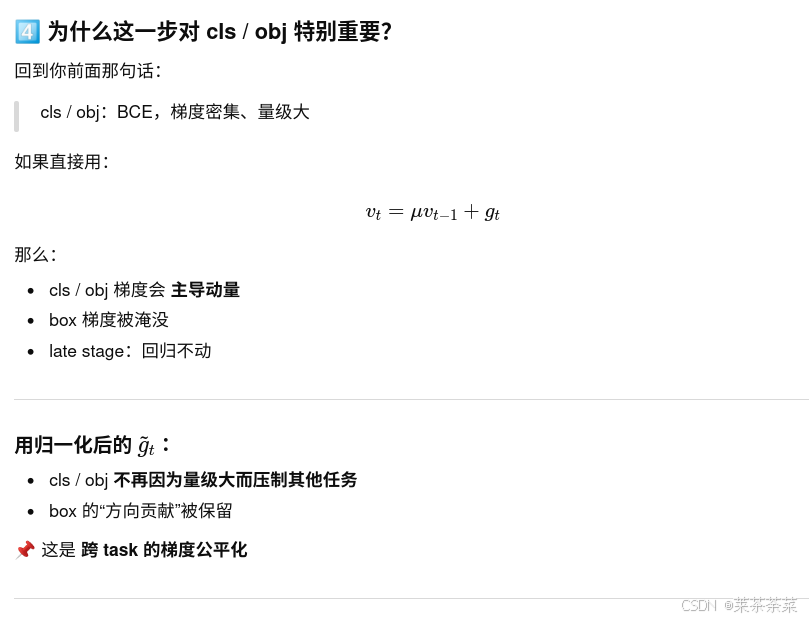
用归一化后的 g tg~tg t:
cls / obj 不再因为量级大而压制其他任务
box 的"方向贡献"被保留
这是 跨 task 的梯度公平化
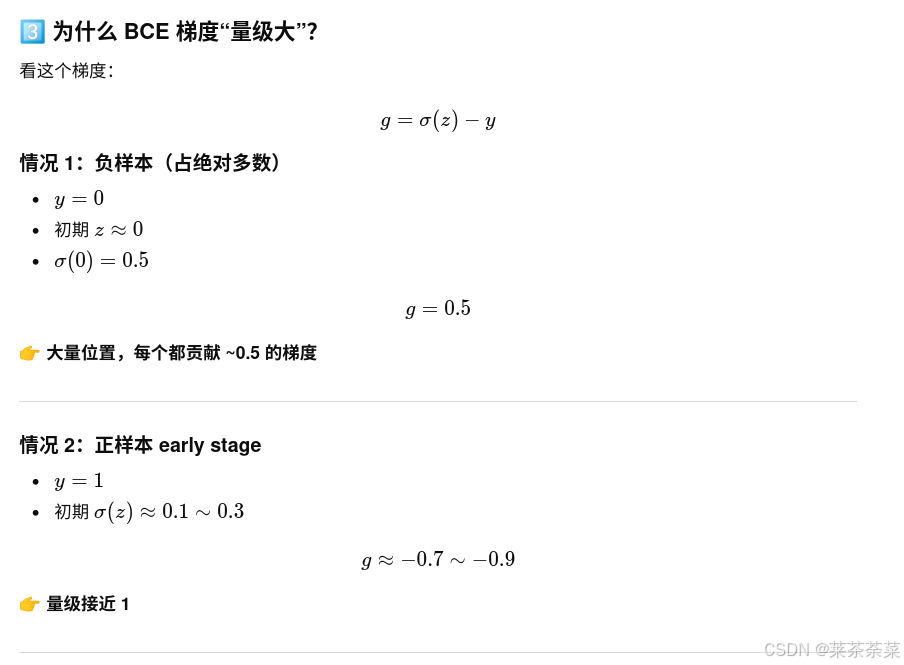
| 特点 | BCE |
|---|---|
| 梯度是否稀疏 | ❌ 否 |
| 单点梯度幅值 | (\le 1) |
| 累积梯度规模 | 非常大 |