本文将用PyTorch从零实现一个完整的Transformer模型,并通过张量形状变化和广播机制详解其内部工作原理。
1. 缩放点积注意力(Scaled Dot-Product Attention)
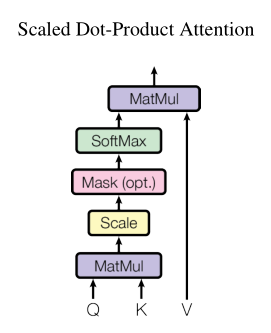
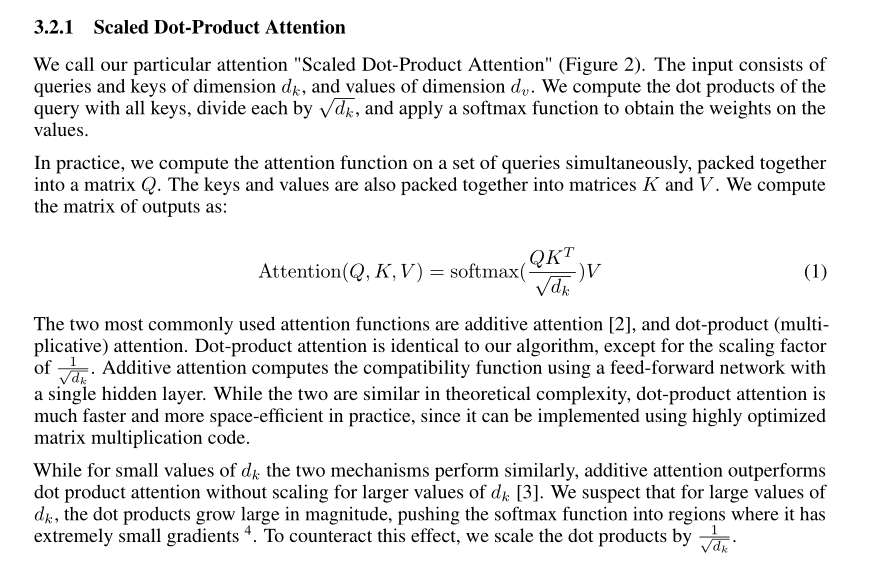
想象你在图书馆找资料:Query 是你提出的问题,Key 是每本书的标签,Value是书里的内容。
- 点积:计算问题与标签的匹配程度(相似度)
- 缩放:防止维度太高时点积结果爆炸(除以√d_k)
- Softmax:把匹配度转换成概率(总和为100%)
- Mask:把不需要看的书(Padding或未来词)屏蔽掉(设为-∞)
代码实现
python
class ScaledDotProductAttention(nn.Module):
def __init__(self):
super().__init__()
def forward(self, Q, K, V, mask=None):
# 输入: Q, K, V 形状都是 [B, H, L, d_k]
# B: Batch size, H: 头数, L: 序列长度, d_k: 每头维度
d_k = Q.size(-1)
# 计算注意力分数: Q·K^T / √d_k
# [B, H, L, d_k] @ [B, H, d_k, L] → [B, H, L, L]
# 结果[L, L]矩阵表示每个词对其他词的关注程度
scores = torch.matmul(Q, K.transpose(-2, -1)) / math.sqrt(d_k)
if mask is not None:
# Mask广播: [B, 1, L, L] → [B, H, L, L] (H维自动复制)
# 将mask为0的位置填充-1e9,softmax后变为0
scores = scores.masked_fill(mask == 0, -1e9)
# Softmax在最后一个维度(L)计算,每行之和为1
attn = torch.softmax(scores, dim=-1) # [B, H, L, L]
# 加权求和: 注意力权重 @ 值向量
# [B, H, L, L] @ [B, H, L, d_k] → [B, H, L, d_k]
output = torch.matmul(attn, V)
return output, attn形状变化流程图:
Q/K/V: [B, H, L, d_k]
↓
Q·K^T: [B, H, L, L] (注意力分数矩阵,第i行第j列表示第i个词对第j个词的关注度)
↓
Softmax: [B, H, L, L] (每行归一化为概率分布)
↓
Attn·V: [B, H, L, d_k] (加权后的特征表示)2. 多头注意力(Multi-Head Attention)
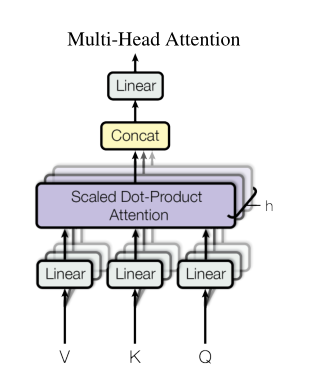

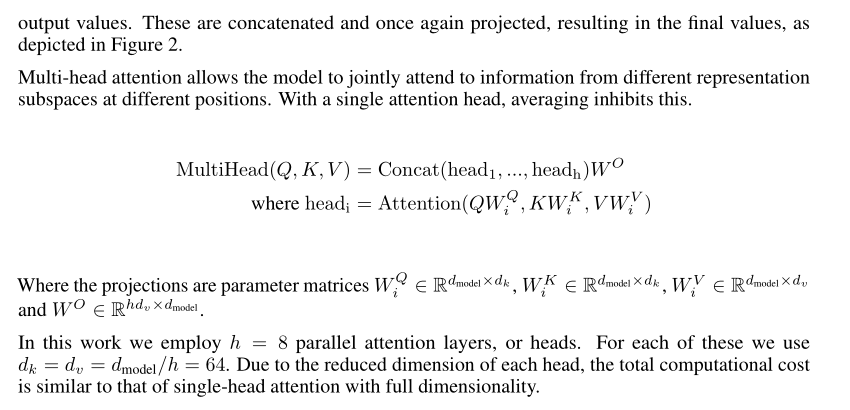
一个人看问题的角度有限,多头注意力就像召集H个专家,每人从不同角度(子空间)分析同一句话,最后汇总意见。
- Linear投影:用 learned 的矩阵把输入映射到不同子空间
- Split Heads:把大向量切成H份,每份d_k维度(类似分组讨论)
- Concat Heads:把H个专家的意见拼接回原始维度
代码实现
python
class MultiHeadAttention(nn.Module):
def __init__(self, d_model, n_heads):
super().__init__()
assert d_model % n_heads == 0
self.d_model = d_model # 模型总维度 D
self.n_heads = n_heads # 头数 H
self.d_k = d_model // n_heads # 每头维度 d_k = D/H
# 四个线性投影矩阵: Q, K, V 投影 + 最终输出投影
self.W_q = nn.Linear(d_model, d_model)
self.W_k = nn.Linear(d_model, d_model)
self.W_v = nn.Linear(d_model, d_model)
self.fc = nn.Linear(d_model, d_model)
self.attn = ScaledDotProductAttention()
def forward(self, q, k, v, mask=None):
B, L, _ = q.size() # 输入: [B, L, D]
# 1. 线性投影并分头
# [B, L, D] → Linear → [B, L, D] → View → [B, L, H, d_k]
Q = self.W_q(q).view(B, L, self.n_heads, self.d_k)
K = self.W_k(k).view(B, L, self.n_heads, self.d_k)
V = self.W_v(v).view(B, L, self.n_heads, self.d_k)
# 2. 调整维度准备并行计算
# [B, L, H, d_k] → Transpose → [B, H, L, d_k]
# 现在H和L交换位置,方便在L维度上做注意力计算
Q, K, V = Q.transpose(1, 2), K.transpose(1, 2), V.transpose(1, 2)
# 3. 计算注意力
out, attn = self.attn(Q, K, V, mask) # out: [B, H, L, d_k]
# 4. 合并多头结果
# Transpose: [B, H, L, d_k] → [B, L, H, d_k]
# View: [B, L, H, d_k] → [B, L, D] (H*d_k=D,拼接所有头)
out = out.transpose(1, 2).contiguous().view(B, L, self.d_model)
return self.fc(out) # 最终线性投影: [B, L, D]分头合并可视化:
输入: [B, L, D] --投影--> [B, L, D]
↓ View
[B, L, H, d_k] (像把D维切成H个小段)
↓ Transpose
[B, H, L, d_k] (H个头并行处理)
↓ Attention
[B, H, L, d_k]
↓ Transpose+View
[B, L, D] (合并所有头的见解)3. 前馈网络(Feed Forward)
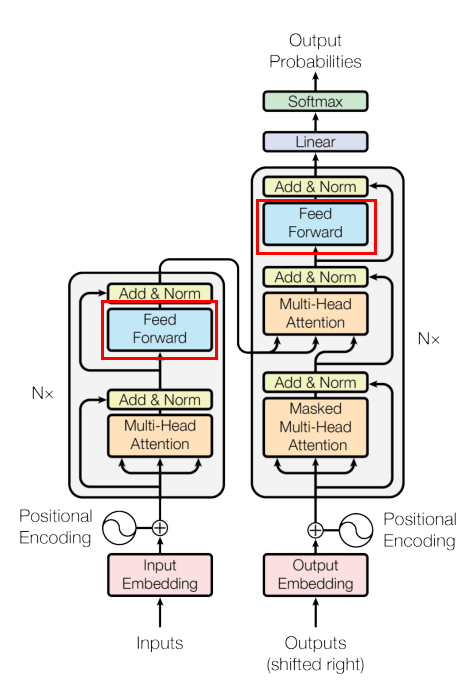
注意力机制提取了上下文关系后,前馈网络对每个位置独立做非线性变换(类似每个词根据自己的上下文表示做深入思考)。
结构:线性扩张 → ReLU激活 → 线性压缩(D → d_ffn → D)
代码实现
python
class FeedForward(nn.Module):
def __init__(self, d_model, d_ffn):
super().__init__()
self.net = nn.Sequential(
nn.Linear(d_model, d_ffn), # [B, L, D] → [B, L, d_ffn] (扩张4倍左右)
nn.ReLU(), # 非线性激活
nn.Linear(d_ffn, d_model) # [B, L, d_ffn] → [B, L, D] (压缩回原维度)
)
def forward(self, x):
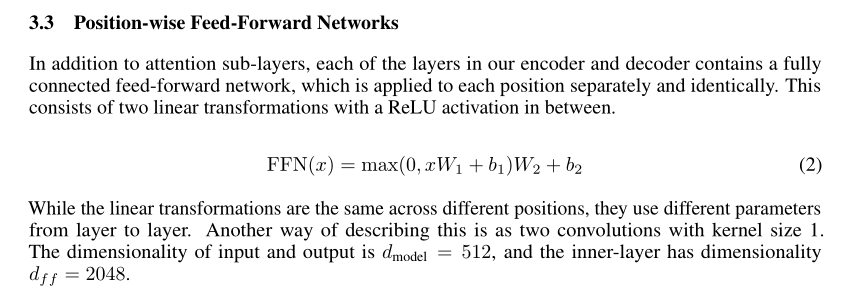
return self.net(x) # [B, L, D]4. 层归一化(Layer Normalization)
深度网络中数据分布会漂移(Internal Covariate Shift)。层归一化把每句话的特征归一化为标准分布(均值0,方差1),让训练更稳定。
- gamma/beta:可学习的缩放和平移参数。如果归一化破坏了有用信息,网络可以通过学习恢复(gamma=σ, beta=μ)。
代码实现
python
class LayerNorm(nn.Module):
def __init__(self, d_model, eps=1e-12):
super().__init__()
# 可学习参数,初始gamma=1(不缩放),beta=0(不平移)
self.gamma = nn.Parameter(torch.ones(d_model)) # [D]
self.beta = nn.Parameter(torch.zeros(d_model)) # [D]
self.eps = eps # 防止除0
def forward(self, x):
# x: [B, L, D]
# 在最后一维(D)计算均值和方差,保持维度用于广播
mean = x.mean(-1, keepdim=True) # [B, L, 1]
var = x.var(-1, unbiased=False, keepdim=True) # [B, L, 1]
# 广播过程1:
# x: [B, L, D] - mean: [B, L, 1] → mean广播为[B, L, D]后相减
out = (x - mean) / math.sqrt(var + self.eps) # [B, L, D]
# 广播过程2:
# gamma: [D] → 自动广播为 [B, L, D]
# beta: [D] → 自动广播为 [B, L, D]
out = self.gamma * out + self.beta # [B, L, D]
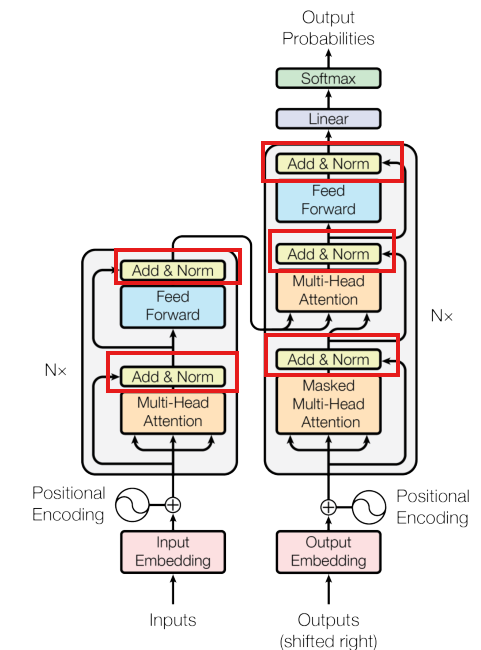
return out5. 位置编码(Positional Encoding)
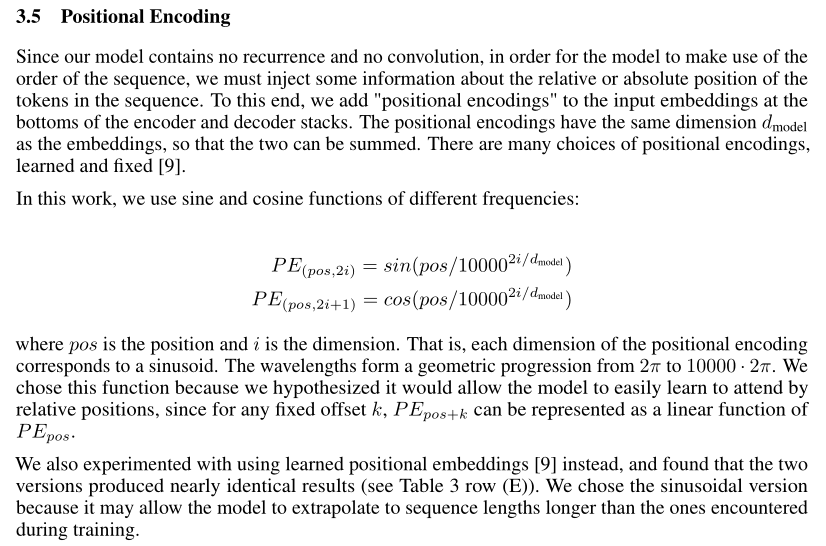
Transformer没有RNN的时序概念,需要位置编码给每个词注入"位置信息"。使用不同频率的正弦/余弦函数:
- 低维度:变化缓慢(捕捉长距离位置关系)
- 高维度:变化快速(捕捉精细位置差异)
代码实现
python
class PositionalEncoding(nn.Module):
def __init__(self, d_model, max_len=5000):
super().__init__()
pe = torch.zeros(max_len, d_model) # [max_len, D]
# pos: [max_len, 1] - 位置索引列向量 [0,1,2...4999]^T
pos = torch.arange(0, max_len).unsqueeze(1)
# div_term: [D/2] - 频率衰减项,指数递减
div = torch.exp(torch.arange(0, d_model, 2) * -(math.log(10000.0) / d_model))
# 广播计算: pos([max_len,1]) * div([D/2]) → [max_len, D/2]
# 偶数维用sin,奇数维用cos
pe[:, 0::2] = torch.sin(pos * div) # [max_len, D/2]
pe[:, 1::2] = torch.cos(pos * div) # [max_len, D/2]
# 注册为buffer: [1, max_len, D],第0维为batch维度
self.register_buffer("pe", pe.unsqueeze(0))
def forward(self, x):
# x: [B, L, D]
# self.pe[:, :L]: [1, L, D]
# 广播相加: [B, L, D] + [1, L, D] → [B, L, D]
# pe在batch维广播,自动复制到所有样本
return x + self.pe[:, :x.size(1)]位置编码模式可视化(d_model=8, max_len=10):
位置0: [sin(0), cos(0), sin(0), cos(0)...] 低频
位置1: [sin(1/10000^0), cos(1/10000^0), ...] 稍高频率
...
位置9: [sin(9/10000^(6/8)), ...] 高频波动6. 掩码(Mask)
- Padding Mask :屏蔽填充符(
<pad>),让模型不要关注无意义的填充。 - Causal Mask:解码器用,防止偷看未来词(只能看已生成的词)。
代码实现
python
class Mask_Address:
def make_src_mask(self, src):
# src: [B, L]
# 非零位置为True(有效词),零位置为False(Padding)
return (src != 0).unsqueeze(1).unsqueeze(2) # [B, 1, 1, L]
def make_tgt_mask(self, tgt):
B, L = tgt.size()
# Padding掩码: [B, 1, 1, L]
pad_mask = (tgt != 0).unsqueeze(1).unsqueeze(2)
# 因果掩码(下三角): [L, L],上三角为False
causal_mask = torch.tril(torch.ones(L, L)).bool()
# 广播与运算:
# pad_mask: [B, 1, 1, L] → 广播为 [B, 1, L, L]
# causal_mask: [L, L] → 广播为 [B, 1, L, L]
# 结果: 必须同时满足"非填充"且"不越界"
return pad_mask & causal_mask # [B, 1, L, L]掩码可视化(L=4):
Padding Mask (假设第3、4位是padding):
[1, 1, 0, 0]
[1, 1, 0, 0]
[1, 1, 0, 0]
[1, 1, 0, 0]
Causal Mask:
[1, 0, 0, 0] (第1词只能看自己)
[1, 1, 0, 0] (第2词能看前2个)
[1, 1, 1, 0] (第3词能看前3个)
[1, 1, 1, 1] (第4词能看全部)
Combined (逐元素与):
[1, 0, 0, 0]
[1, 1, 0, 0]
[1, 1, 0, 0] (第3行被padding限制)
[1, 1, 0, 0] (第4行被padding限制)7. 编解码器层(Encoder/Decoder Layer)
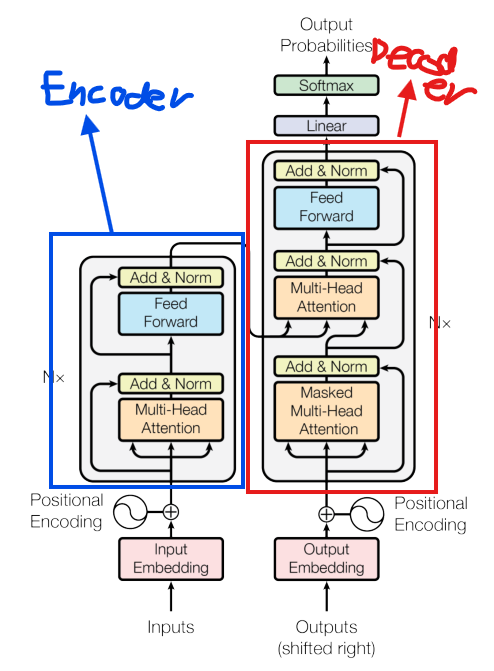
- 编码器:自注意力提取输入特征 → 残差连接+归一化 → 前馈网络 → 残差连接+归一化
- 解码器: masked自注意力(看不到未来)→ 交叉注意力(看编码器输出)→ 前馈网络,每层都有残差连接
代码实现
python
class EncoderLayer(nn.Module):
def __init__(self, d_model, n_heads, d_ffn):
super().__init__()
self.self_attn = MultiHeadAttention(d_model, n_heads)
self.ffn = FeedForward(d_model, d_ffn)
self.norm1 = nn.LayerNorm(d_model)
self.norm2 = nn.LayerNorm(d_model)
def forward(self, x, src_mask):
# 子层1: 多头自注意力 + 残差连接 + 层归一化
# x + self_attn(x): 残差连接防止梯度消失
x = self.norm1(x + self.self_attn(x, x, x, src_mask)) # [B, L, D]
# 子层2: 前馈网络 + 残差连接 + 层归一化
x = self.norm2(x + self.ffn(x)) # [B, L, D]
return x
class DecoderLayer(nn.Module):
def __init__(self, d_model, n_heads, d_ffn):
super().__init__()
self.self_attn = MultiHeadAttention(d_model, n_heads) # 自注意力
self.enc_attn = MultiHeadAttention(d_model, n_heads) # 交叉注意力
self.ffn = FeedForward(d_model, d_ffn)
self.norm1 = nn.LayerNorm(d_model)
self.norm2 = nn.LayerNorm(d_model)
self.norm3 = nn.LayerNorm(d_model)
def forward(self, x, enc_out, tgt_mask, src_mask):
# 子层1: Masked Self-Attention(只能看已生成的词)
x = self.norm1(x + self.self_attn(x, x, x, tgt_mask))
# 子层2: Cross-Attention(Q来自解码器,K/V来自编码器)
# x作为Query,去查询enc_out的Key和Value
x = self.norm2(x + self.enc_attn(x, enc_out, enc_out, src_mask))
# 子层3: Feed Forward
x = self.norm3(x + self.ffn(x))
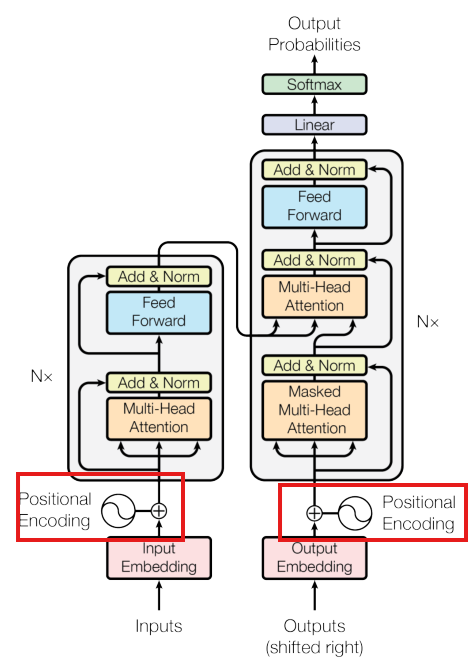
return x # [B, L, D]8. 完整Transformer模型
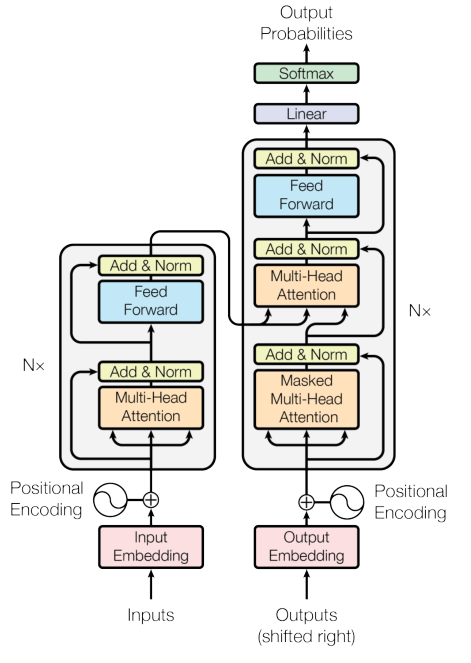
组装所有组件:
- 嵌入层:把整数ID变成向量
- 位置编码:加上位置信息
- N层编码器:提取输入特征
- N层解码器:生成输出序列
- 输出投影:映射到词表维度(预测下一个词)
代码实现
python
class Transformer(nn.Module):
def __init__(self, vocab_size, d_model, n_heads, d_ffn, n_layers):
super().__init__()
# 词嵌入: [B, L] → [B, L, D]
self.emb = nn.Embedding(vocab_size, d_model)
self.pos = PositionalEncoding(d_model)
self.mask_address = Mask_Address()
# 堆叠N层编码器和解码器
self.encoder = nn.ModuleList([
EncoderLayer(d_model, n_heads, d_ffn) for _ in range(n_layers)
])
self.decoder = nn.ModuleList([
DecoderLayer(d_model, n_heads, d_ffn) for _ in range(n_layers)
])
# 输出投影到词表: [B, L, D] → [B, L, V]
self.fc_out = nn.Linear(d_model, vocab_size)
def forward(self, src, tgt):
# 生成掩码
src_mask = self.mask_address.make_src_mask(src) # [B, 1, 1, L_src]
tgt_mask = self.mask_address.make_tgt_mask(tgt) # [B, 1, L_tgt, L_tgt]
# 编码器路径
enc = self.pos(self.emb(src)) # [B, L_src, D]
for layer in self.encoder:
enc = layer(enc, src_mask) # [B, L_src, D]
# 解码器路径
dec = self.pos(self.emb(tgt)) # [B, L_tgt, D]
for layer in self.decoder:
# dec: [B, L_tgt, D], enc: [B, L_src, D]
dec = layer(dec, enc, tgt_mask, src_mask) # [B, L_tgt, D]
return self.fc_out(dec) # [B, L_tgt, V]整体数据流:
src: [B, L_src] --emb+pos--> [B, L_src, D] --Encoder×N--> [B, L_src, D] (enc)
↓
tgt: [B, L_tgt] --emb+pos--> [B, L_tgt, D] --Decoder×N--> [B, L_tgt, D] (dec)
↓
fc_out: [B, L_tgt, V]
↓
Softmax → 词表概率分布总结
通过本文,我们实现了完整的Transformer架构:
- 注意力机制通过Q/K/V三元组计算词间依赖
- 多头机制并行捕捉不同子空间特征
- 位置编码注入时序信息
- 掩码处理变长序列和自回归生成
- 残差连接和层归一化稳定深层网络训练
理解这些张量形状[B, H, L, D]的变化和广播机制,是掌握Transformer实现的关键。
引用:
@misc{vaswani2023attentionneed,
title={Attention Is All You Need},
author={Ashish Vaswani and Noam Shazeer and Niki Parmar and Jakob Uszkoreit and Llion Jones and Aidan N. Gomez and Lukasz Kaiser and Illia Polosukhin},
year={2023},
eprint={1706.03762},
archivePrefix={arXiv},
primaryClass={cs.CL},
url={https://arxiv.org/abs/1706.03762},
}