基于Matlab/Simulink的两电平逆变器矢量控制系统的仿真波形的动态分析 不,需要的资料,文档有
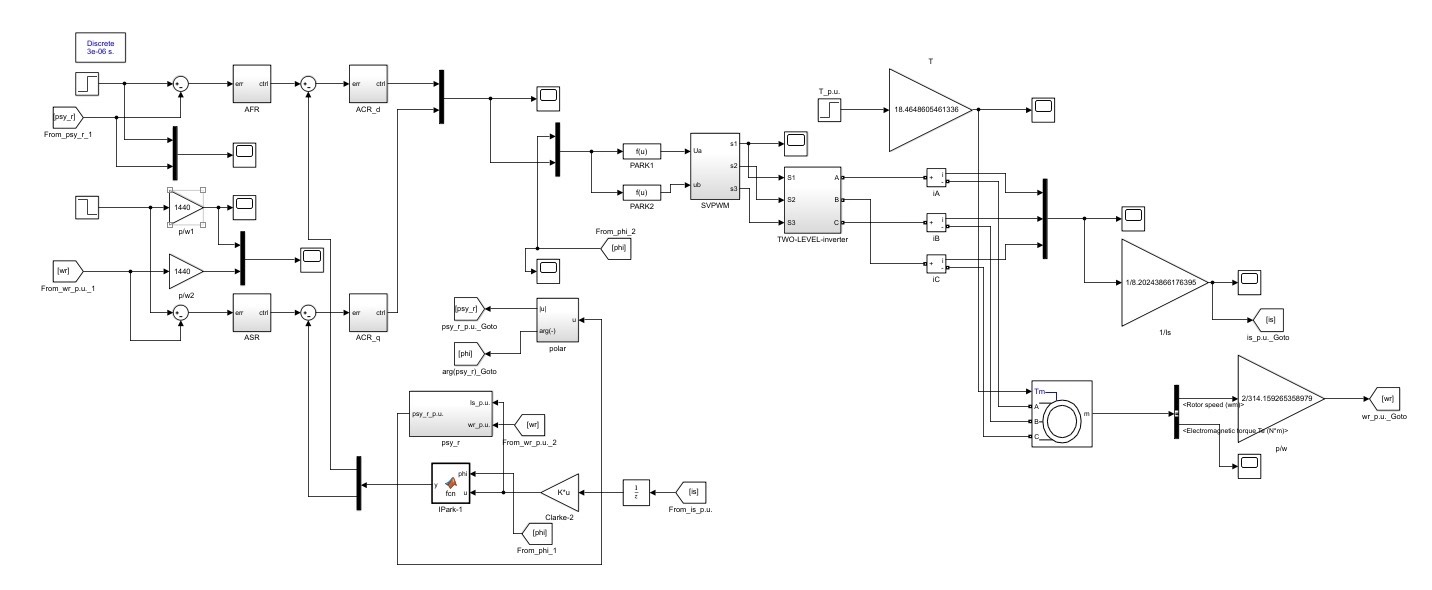
两电平逆变器的矢量控制在电机驱动领域属于基本功。今天咱们直接上Simulink模型,看看那些跳动的波形背后藏着什么门道。打开模型先别急着点运行,重点得盯着这几个地方:SVPWM生成模块、电流环PI参数、坐标变换的实现逻辑。
先扒开SVPWM模块的代码,这里有个关键点:
matlab
function [g1, g2, g3] = svpwm(alpha, beta, Vdc)
% 伏秒平衡计算
T0 = 1 - (T1 + T2); % 零矢量作用时间
% ...中间计算过程省略...
% 死区补偿部分
dead_time = 1e-6; % 1微秒死区
g1 = g1_raw - dead_time*(g1_raw > 0);这段代码里的死区补偿处理直接影响着输出波形的谐波含量。上次调试时发现,当死区时间设到2μs以上,电机电流THD突然从3%飙到8%,波形出现明显畸变,就像正弦波被狗啃过似的。
基于Matlab/Simulink的两电平逆变器矢量控制系统的仿真波形的动态分析 不,需要的资料,文档有
电流环的PI参数设置更是个玄学。模型里用的是经典的双闭环结构:
matlab
Kp_Id = 0.85; % q轴电流环比例系数
Ki_Id = 120; % 积分系数但别被参数数值骗了,实际调试时要看阶跃响应。有一次我把积分时间常数从0.01调到0.005,结果系统震荡得像蹦迪------上升时间确实快了0.5ms,但超调量直接干到25%。这时候得在模型里打开示波器模块,盯着id、iq的跟踪曲线慢慢调。
动态加载时的波形最有意思。空载切满载瞬间,直流母线电压会有个5%的骤降(见下图波形),这时候观测器估算的角度要是没跟上,整个矢量定向就乱套了。解决办法是在电压前馈通道加了个一阶滞后环节:
simulink
Transfer Fcn
.Numerator: [0.2]
.Denominator: [0.02 1]这个滤波时间常数选得太大反而会引入相位延迟,选太小又滤不掉噪声,需要拿着频谱分析仪反复试。
最后说个新手容易栽的坑:坐标变换模块里角度输入的单位。有次师弟把机械角度当电角度输进去,结果电机转速显示3600rpm实际才转了几百转。检查变换模块时要确认:
matlab
theta_e = pole_pairs * theta_m; % 极对数换算这行代码要是漏了极对数相乘,整个矢量控制就变成无头苍蝇了。遇到转速震荡先别急着调参数,把变换模块每个信号线都接上示波器看看,说不定就是这种低级错误在作妖。