AMC多线程框架,模块化设计,显示,采集 机器人,测试,相机,主控分离设计框架。 LabVIEW源吗。 版本是LabVIEW2017 VIPM插件AMC DMC GUI
最近在研究基于LabVIEW 2017的机器人项目,其中用到了AMC多线程框架以及一些很有意思的设计理念,今天就来和大家分享分享。
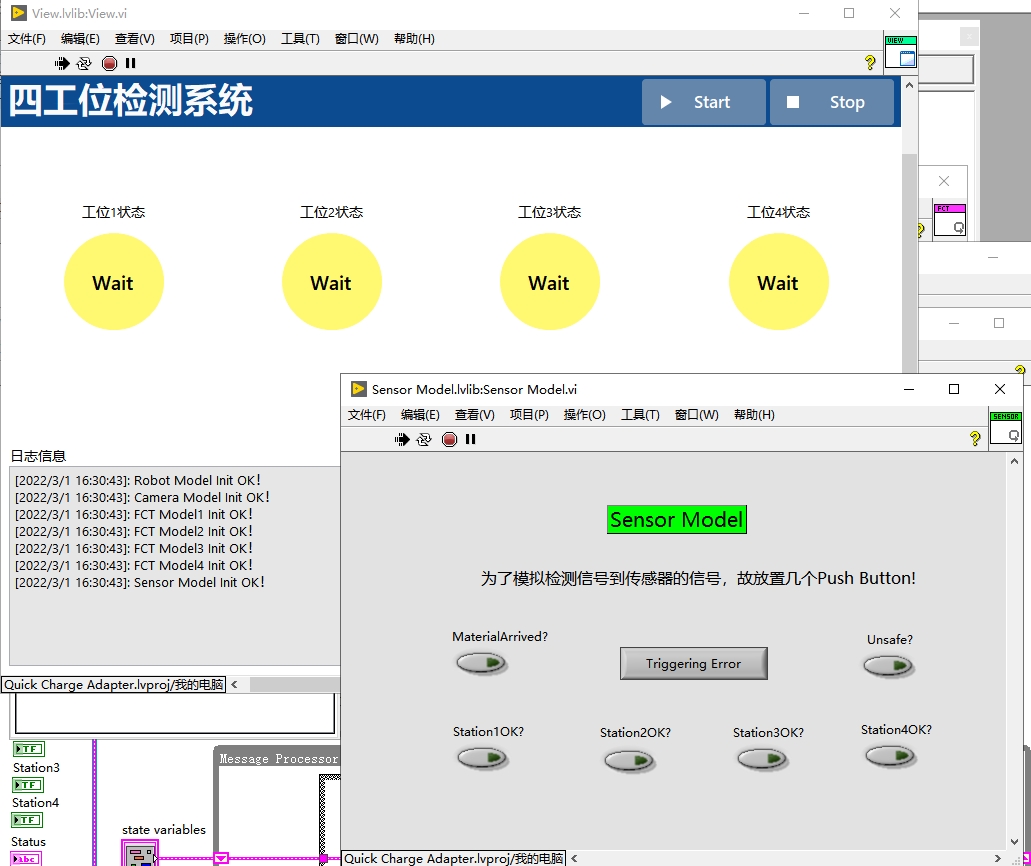
一、主控分离设计框架的魅力
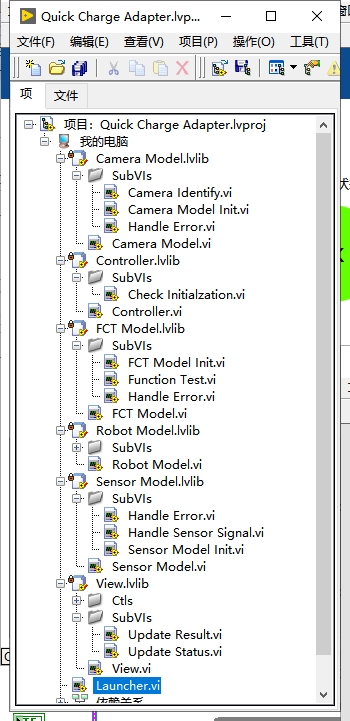
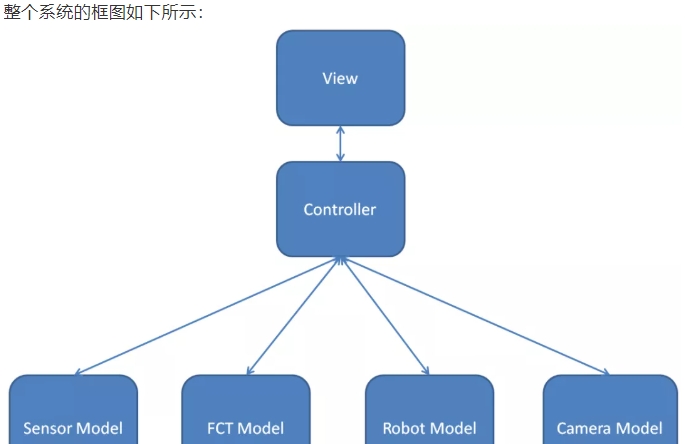
在这个机器人项目里,主控分离设计框架是个亮点。它将机器人系统中不同功能模块隔离开,各自独立运行又相互协作。就像一辆汽车,发动机、变速箱、刹车系统各司其职,但又共同保障汽车行驶。在LabVIEW环境下,我们可以通过创建不同的VI(虚拟仪器)来分别代表主控模块、相机模块、采集模块等。
比如说相机模块的VI,它专门负责与相机进行通信,获取图像数据。代码大概长这样(简化示意):
labview
// 初始化相机连接
Open_Camera.vi (camera_address, camera_parameters);
// 采集图像
image_data = Grab_Image.vi (camera_handle);
// 关闭相机连接
Close_Camera.vi (camera_handle);这里OpenCamera.vi**负责建立与相机的连接,Grab Image.vi从相机获取图像数据,Close_Camera.vi在使用完相机后关闭连接。这样独立出来的模块,便于调试和维护。要是相机部分出了问题,直接聚焦在这个相机VI里排查就好。
二、AMC多线程框架的强大
AMC多线程框架在LabVIEW 2017结合VIPM插件后,真的让整个系统运行效率大幅提升。多线程能让不同任务同时执行,就好比一边听音乐一边下载文件,互不干扰。
AMC多线程框架,模块化设计,显示,采集 机器人,测试,相机,主控分离设计框架。 LabVIEW源吗。 版本是LabVIEW2017 VIPM插件AMC DMC GUI
在LabVIEW中实现多线程,借助AMC框架可以很方便。比如我们有一个采集任务和一个显示任务,代码可以这么写:
labview
// 创建采集线程
Task_1 = Create_Thread (采集任务子VI);
// 创建显示线程
Task_2 = Create_Thread (显示任务子VI);
// 启动线程
Start_Thread (Task_1);
Start_Thread (Task_2);
// 等待线程完成(这里可以设置超时等)
Wait_For_Thread_Completion (Task_1);
Wait_For_Thread_Completion (Task_2);CreateThread**函数创建一个新线程,把具体的任务(采集或显示任务子VI)传递进去。然后Start Thread启动线程,让它们开始工作。最后WaitForThread_Completion等待线程完成任务。这样采集和显示就能同时进行,提升了系统实时性。
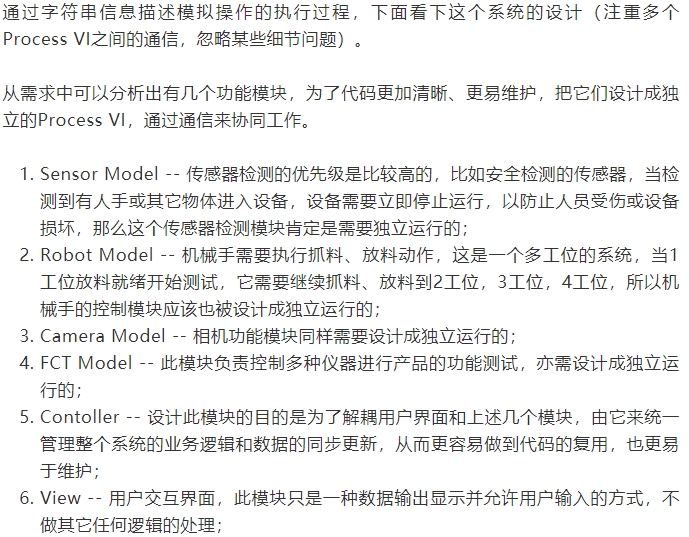
三、模块化设计与测试
模块化设计贯穿整个项目。每个功能都封装成模块,像采集模块负责数据采集,显示模块负责数据展示。这种设计方便测试,对每个模块可以单独进行功能测试。
比如对采集模块测试,我们可以写一个简单的测试VI:
labview
// 调用采集模块
data = 采集模块VI (parameters);
// 检查采集数据是否符合预期格式
if (Is_Valid_Data (data)) {
Report_Success ();
} else {
Report_Failure ();
}先调用采集模块获取数据,然后通过IsValidData函数检查数据是否符合要求,根据结果报告测试成功或失败。
基于LabVIEW 2017结合AMC多线程框架等一系列设计,在机器人项目中展现出了强大的功能和可扩展性,希望我的分享能给大家在类似项目开发中带来一些启发。