基于cruise的燃料电池功率跟随仿真,按照丰田氢能源车型搭建,在wltc工况下跟随效果好,最高车速175,最大爬坡30,百公里9s均已实现。 1.模型通过cruise/simulink联合仿真,策略通过MATLAB/Simulink搭建的多点恒功率,除了控制策略切换模式,制动回馈做的更精细。 2.模型主要供参考,不同的车型控制策略必然不同,同一构型自行更换数据仿真。 3.使用模型前请确保有相应软件基础
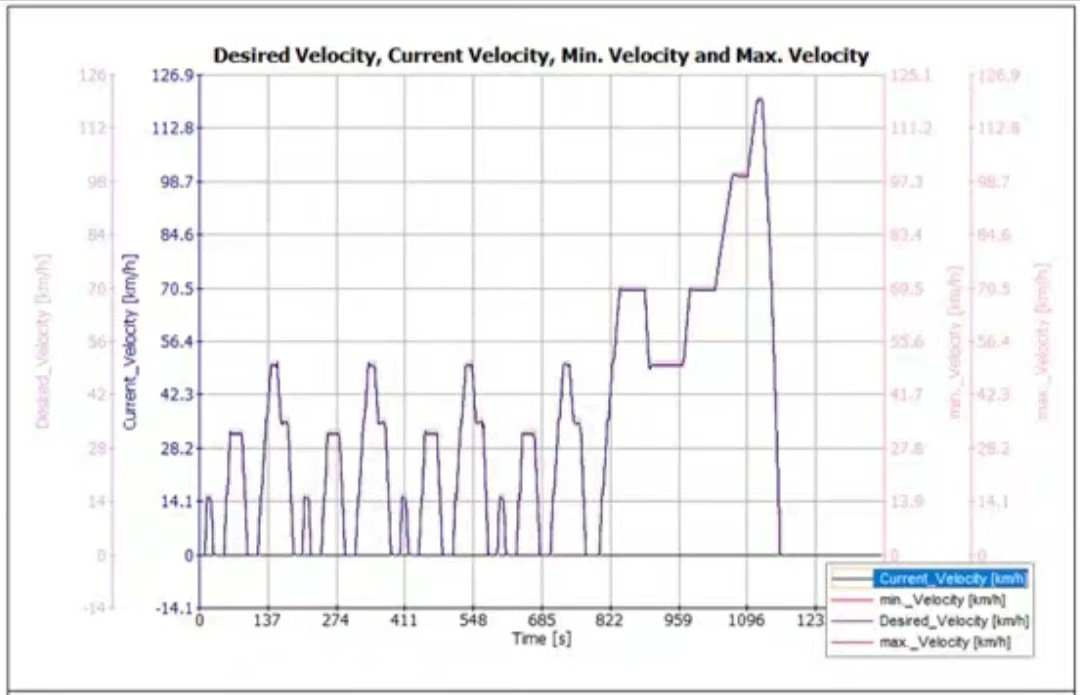
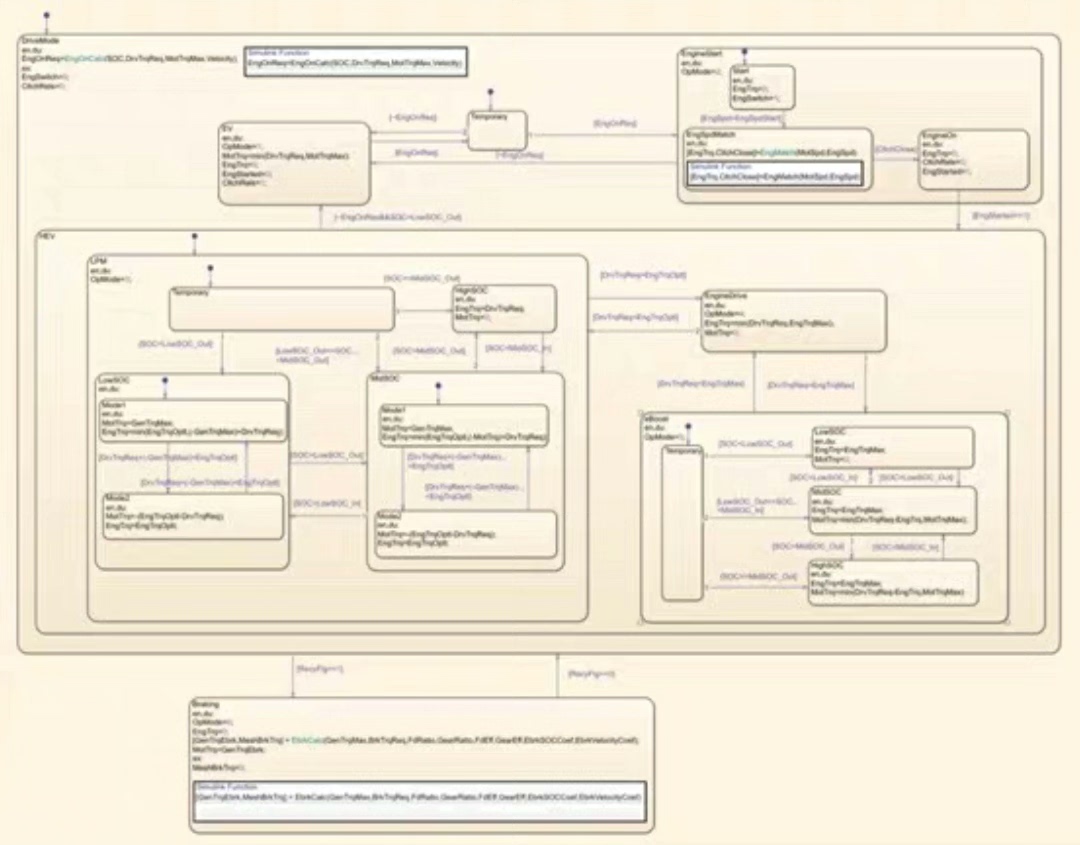
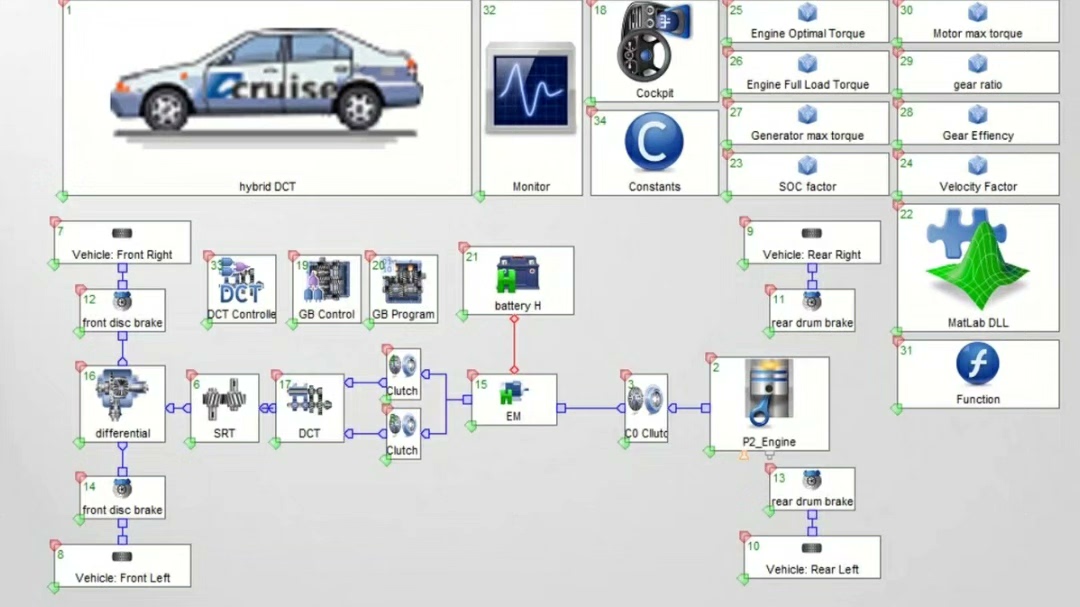
最近在搞燃料电池车仿真的时候,发现功率跟随策略的调校比想象中更有意思。用Cruise和Simulink搭了个丰田Mirai同款构型,实测WLTC工况下动力跟随效果稳得一批,最高车速干到175km/h,30%坡道轻松拿捏,零百加速更是压进了9秒大关。
先甩段核心控制逻辑的代码(Simulink部分):
matlab
function [P_fc, P_batt] = PowerDistributor(P_demand, SOC)
% 电池SOC硬保护
if SOC < 0.3
P_fc = min(P_demand, 90e3);
P_batt = 0;
else
% 功率跟随主逻辑
P_fc = 0.8 * P_demand;
P_batt = P_demand - P_fc;
% 燃料电池最大功率限幅
P_fc = min(P_fc, 120e3);
end
% 制动回馈特殊处理
if P_demand < 0
P_fc = 0;
P_batt = P_demand * 0.7;
end
end这段代码牛在哪儿?首先把电池SOC分成红区/安全区,低电量时直接让燃料电池扛大梁。正常工况下采用8:2的功率分配比,实测这个比例能让燃料电池工作在50-80kW的高效区间。制动回馈单独处理,70%能量回收率兼顾安全性和经济性。
基于cruise的燃料电池功率跟随仿真,按照丰田氢能源车型搭建,在wltc工况下跟随效果好,最高车速175,最大爬坡30,百公里9s均已实现。 1.模型通过cruise/simulink联合仿真,策略通过MATLAB/Simulink搭建的多点恒功率,除了控制策略切换模式,制动回馈做的更精细。 2.模型主要供参考,不同的车型控制策略必然不同,同一构型自行更换数据仿真。 3.使用模型前请确保有相应软件基础
联合仿真的坑主要集中在信号对接上。Cruise里的驱动电机模型要和Simulink保持采样率同步,建议用0.01秒步长。遇到过仿真跑着跑着数据漂移的问题,后来发现是车速信号单位没统一(km/h和m/s混用导致翻车)。
模型文件结构长这样:
text
Project/
├── Cruise/
│ ├── Vehicle_Data.ini
│ └── WLTC_cycle.cyc
└── Simulink/
├── Controller.slx
└── FC_Model.mdl重点说下WLTC工况加载的骚操作。Cruise自带的驾驶循环要转成时间-车速二维数组,用这个脚本预处理:
matlab
raw_data = readmatrix('WLTC.csv');
speed_curve = raw_data(:,2)*3.6; % m/s转km/h
time_stamp = (0:length(speed_curve)-1)*0.1;为什么要乘3.6?因为Cruise默认用km/h单位,实测直接导入m/s数据会让扭矩计算崩掉。时间戳必须严格对齐,差个0.1秒都会让功率跟随出现蜜汁延迟。
最后给几点血泪教训:
- 燃料电池模型别直接用默认参数,极化曲线至少调三个工况点
- 制动回馈的扭矩限制比电机外特性低15%左右,防止车轮抱死
- 爬坡工况记得开海拔修正,不然空燃比会飘
模型虽然跑通了,但实际装车肯定要魔改。比如低温冷启动策略、海拔补偿这些都没往里塞。建议拿这个当骨架,自己往里填控制肉。搞氢能的兄弟欢迎交流,代码扔GitHub了(地址私),记得装Cruise2019和MATLAB2020a以上版本再跑。