文章目录
- 引言
- SPI总线的基本原理与拓扑结构
- 传输的四种模式(核心时序)
- [使用 FPGA 实现 SPI 控制器的 N 种方法](#使用 FPGA 实现 SPI 控制器的 N 种方法)
- [Verilog实现IIC 主从机](#Verilog实现IIC 主从机)
- [优点 & 缺点:](#优点 & 缺点:)
引言
在嵌入式系统和数字电路设计中,芯片间的通信至关重要。在众多的串行通信协议中,SPI(Serial Peripheral Interface,串行外设接口)以其全双工、同步传输、连线简单(通常只需4根线)的特点,被广泛应用于传感器、ADC、DAC、Flash存储器等外设的连接。
对于FPGA或ASIC工程师而言,仅仅会调用SPI IP核是不够的,深入理解其时序并掌握使用Verilog实现Master(主机)和Slave(从机)的设计思路,是进阶的必经之路。本文将带你图文结合地梳理SPI的核心要点。
SPI总线的基本原理与拓扑结构
SPI是一种同步、全双工的通信总线。所谓"同步",意味着通信双方共用一个时钟信号;所谓"全双工",意味着在同一时刻,数据可以同时进行发送和接收。
四根核心信号线
SPI通信主要依靠以下四根信号线完成:
- SCLK (Serial Clock):串行时钟,永远由主机发出,用于同步数据传输。
- MOSI (Master Out Slave In):主机输出,从机输入数据线。
- MISO (Master In Slave Out):主机输入,从机输出数据线。
- CS / SS (Chip Select / Slave Select):片选信号,通常由主机控制,低电平有效。用于选中特定的从机进行通信。
数据交换的本质
SPI通信的本质其实是"移位寄存器的数据交换"。主机和从机内部各有一个移位寄存器。在SCLK时钟的驱动下,主机寄存器里的最高位(MSB)通过MOSI线移入从机的最低位(LSB),同时从机寄存器里的最高位通过MISO线移入主机的最低位。经过8个(或更多)时钟周期后,主机和从机里的数据就完成了一次互换。

两种典型拓扑结构
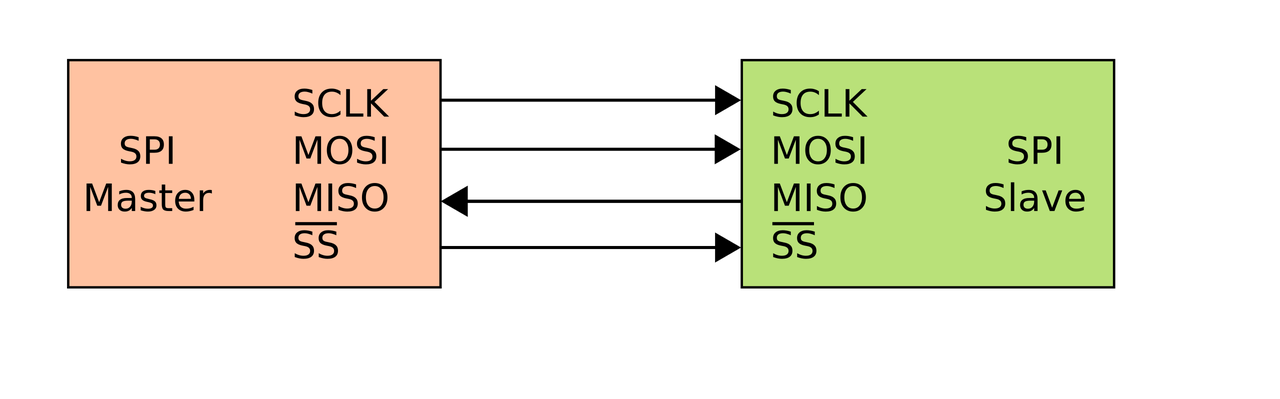
① 一主一从 (Single Master - Single Slave)
这是最简单的连接方式。主机通过一根专用的CS线连接到唯一的从机。当主机拉低CS信号时,通信开始。
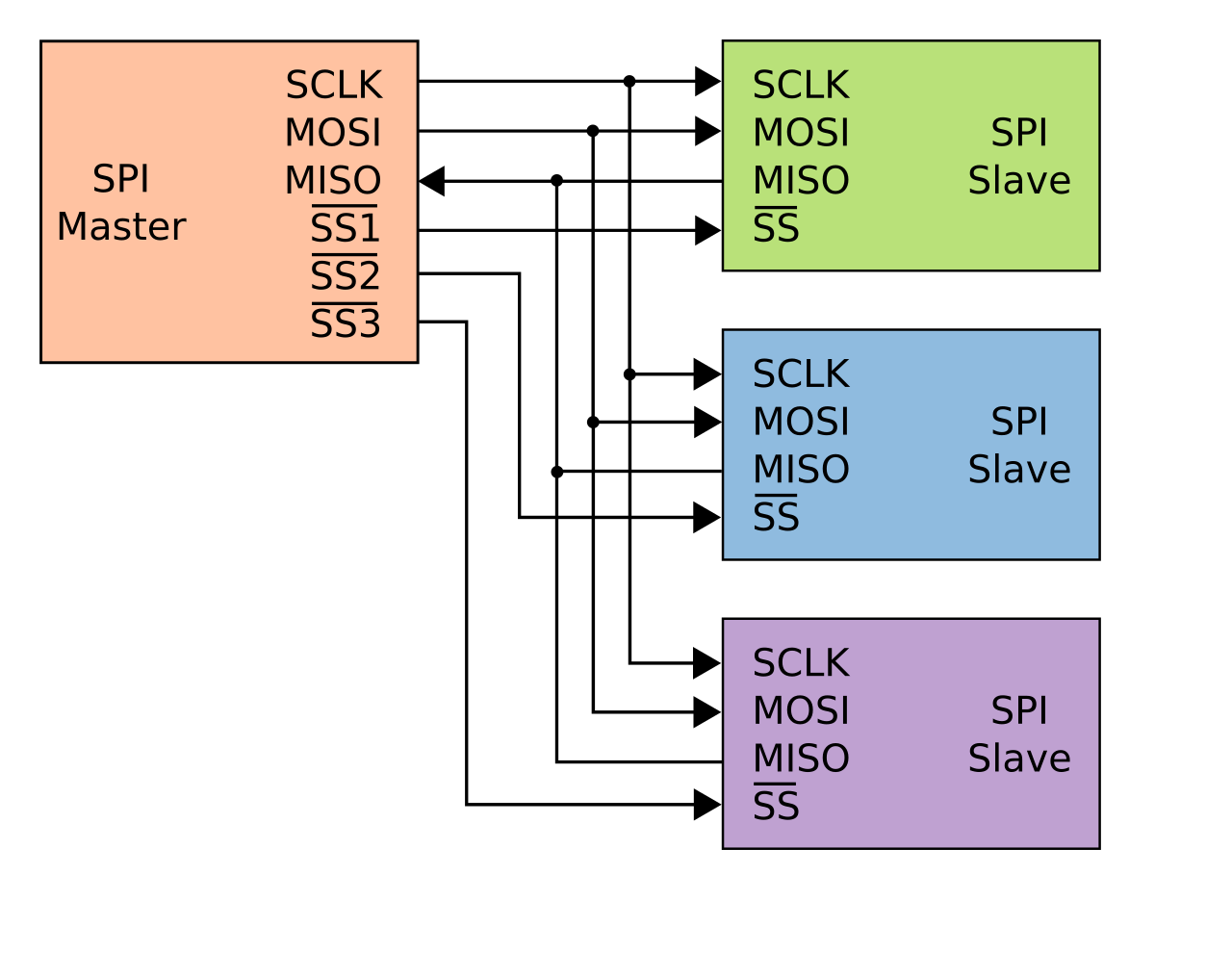
② 一主多从 (Single Master - Multiple Slaves)
在实际应用中,一个主机往往需要挂载多个从机。SPI支持这种拓扑。
- SCLK、MOSI、MISO这三根线在所有设备间是共用的(总线式)。
- 关键在于CS片选线。主机必须为每一个从机提供一根独立的CS信号线(如CS1, CS2, CS3)。
- 在某一时刻,主机只能拉低其中一个从机的CS线,此时只有被选中的从机占用MISO线与主机通信,其他未被选中的从机其MISO引脚必须处于高阻态(Hi-Z),以避免总线冲突。
传输的四种模式(核心时序)
这是SPI最容易让人困惑的地方。不同的SPI设备可能工作在不同的模式下,如果主机和从机的模式配置不一致,通信就会失败。
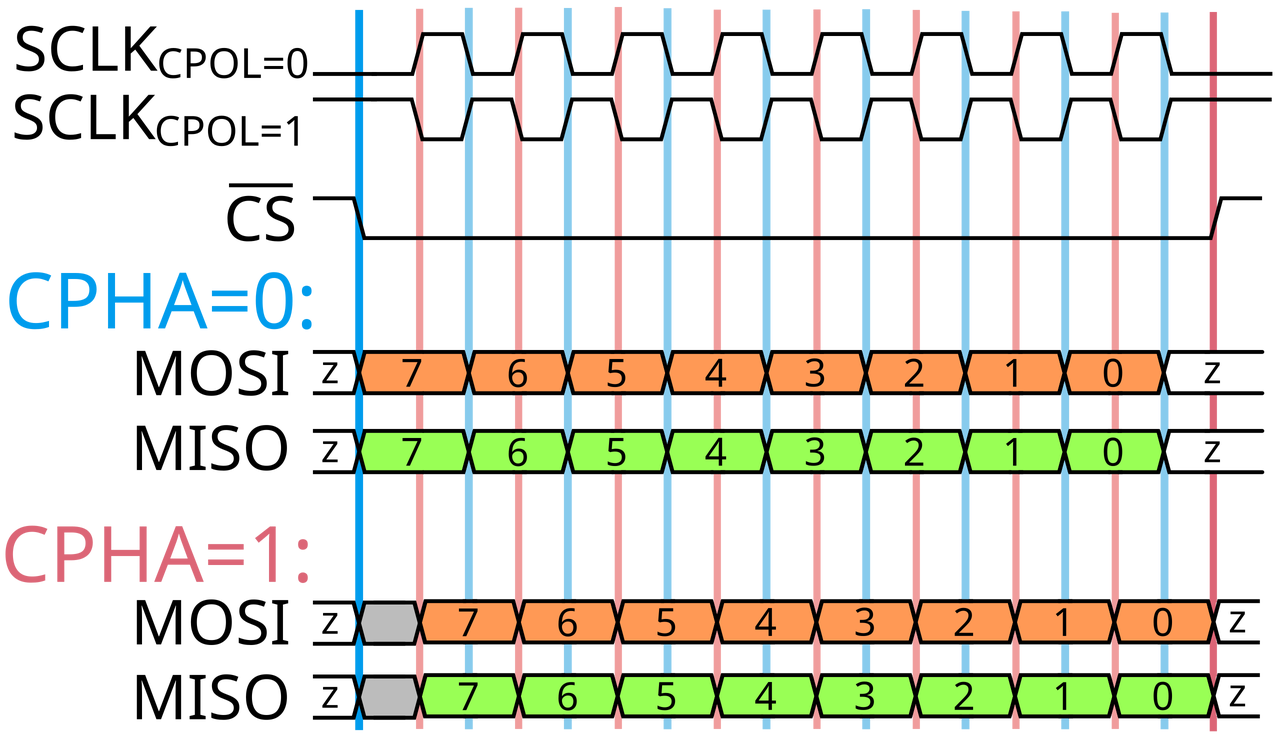
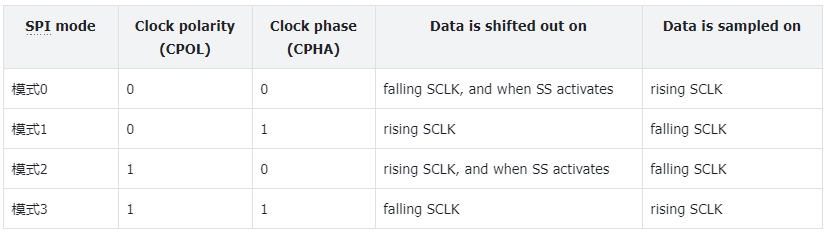
SPI的四种模式由两个参数决定:CPOL (Clock Polarity, 时钟极性) 和 CPHA (Clock Phase, 时钟相位)。
- CPOL (时钟极性):决定了SCLK在空闲状态(即CS为高电平,没有数据传输时)的电平。
- CPOL = 0:SCLK空闲时为低电平。
- CPOL = 1:SCLK空闲时为高电平。
- CPHA (时钟相位):决定了数据是在SCLK的第几个边沿被采样(读取)。
- CPHA = 0:数据在SCLK的第一个跳变沿(上升沿或下降沿,取决于CPOL)被采样。数据通常在片选拉低后立刻准备好。
- CPHA = 1:数据在SCLK的第二个跳变沿被采样。数据在前一个边沿进行移位/更新。
根据CPOL和CPHA的不同组合,形成了四种标准的SPI模式。理解下图是掌握SPI时序的关键:
使用 FPGA 实现 SPI 控制器的 N 种方法
在 Xilinx FPGA 开发中,实现 SPI 通常有几种方式:
- 使用 AXI QUAD SPI IP 核:
- 适用场景: 配合 MicroBlaze 软核或 Zynq/MPSoC 的 PL 端扩展。
- 特点: 官方 IP,功能全(支持 Standard/Dual/Quad 模式),驱动完善。
- 缺点: 依赖 AXI 总线,占用较多 LUT 资源,不够轻量,且交互时序受限于 AXI 总线延迟。
- 使用 Zynq/MPSoC PS 端的 MIO SPI:
- 适用场景: 嵌入式 Linux 或裸机开发,外设直接挂在 PS 端。
- 特点: 直接走芯片内部硬核,不占用任何 PL 逻辑资源,性能稳定。
- 缺点: 受限于 MIO 引脚分配(MIO 引脚数量固定且位置不可变), PCB 布线灵活性差。
- 使用 Zynq/MPSoC PS 端的 EMIO SPI:
- 适用场景: 需要使用 PS 硬核驱动,但 MIO 引脚不够用或外设连接在 PL 端引脚时。
- 特点: 将 PS 端的硬核 SPI 信号通过 EMIO 路由到 PL 端的任意引脚。既保留了硬核驱动的便利性,又拥有了 PL 引脚分配的灵活性。
- 缺点: 相比 MIO,信号经过 PL 会引入微小的延时(通常可忽略)。
- 使用 GPIO 模拟 SPI :
- 适用场景: 对速度要求极低(如几 KHz)的配置接口,或者临时调试。
- 特点: 使用 AXI GPIO (PL) 或 PS GPIO 通过软件拉高拉低引脚来模拟时序。
- 缺点: 效率极低,严重占用 CPU 资源,无法实现高速传输,容易被中断打断导致时序错误。
- 纯 RTL 手写实现(本文重点):
- 适用场景: 高速 ADC/DAC 采集、FPGA 逻辑直接控制外设、非标准位宽/协议、由于资源限制无法使用软核时。
- 特点: 灵活性最高。不依赖 CPU 和 AXI 总线,时序完全可控,延迟最低,资源占用最小。
- 去处理器化: 很多时候 FPGA 是作为协处理器存在的,它需要自主从 SPI 接口的传感器(如加速度计、陀螺仪、ADC)读取数据并处理,然后再打包发给 CPU。如果每次读取都要 CPU 介入,系统的实时性会大打折扣。
- 非标协议: 很多工业或军工芯片名为 "SPI",实则在时序上有很多魔改(比如需要 24bit 传输,或者 CS 信号有特殊拉高要求),标准 IP 核往往无法满足,只能手写。
Verilog实现IIC 主从机
SPI主机
以模式0,SPI主机写功能为例,展示两种SPI主机驱动代码,这两种代码的区别主要在于时钟生成机制和适用频率。 如果是高速 SPI(如 >25MHz),为了保证时钟质量和时序对齐,我会用 ODDR 原语来驱动; 如果是低速 SPI(如 <1MHz),对时序要求不高,我会直接用逻辑计数器分频生成时钟,这样代码通用性更好。
【设计文件】spi_driver.v
c
//-----------------------------------------------------------------------------
//
// Copyright (c) 2009 Xilinx Inc.
//
// Project : Programmable Wave Generator
// Module : dac_spi.v
// Parent : wave_gen
// Children : None
//
// Description:
// This module takes each sample generated by the sample generator and
// sends it to the digital to analog converter (DAC) using the SPI
// protocol. Each SPI cycle is 32 clocks long, consisting of an address,
// command, and 16 bits of data (MSbit first). The DAC on the development
// boards use only the most significant 12 out of the 16 bit samples, but
// all 16 bits are transmitted.
//
// Parameters:
//
// Local Parameters:
//
// Notes :
//
// Multicycle and False Paths
// None.
//
//
module spi_driver (
input clk_i // Clock input
,input rst_i // Active HIGH reset - synchronous to clk_i
,input [ 23: 0] samp // Sample output
,input [ 4: 0] sample_width
,input samp_val // New sample is available
,output spi_clk_o // Clock for SPI - generated by DDR flop
,output reg spi_mosi_o // SPI master-out-slave-in data bit
,output reg spi_cs_n_o // Chip select for DAC
,output reg spi_done // SPI transaction is complete
);
//***************************************************************************
// Parameter definitions
//***************************************************************************
//***************************************************************************
// Reg and Wire declarations
//***************************************************************************
reg active ; // Indicates that this module is sending a seq
reg old_active ; // The value of active on the last clock
reg old_old_active ; // The value of active on the previous clock
reg [ 4: 0] bit_cnt ; // Counts from 30 to 0
reg spi_mosi ; // SPI master-out-slave-in data bit
reg cs_n ; // Chip select
reg mosi_latch ;
reg cs_latch ;
//***************************************************************************
// Code
//***************************************************************************
// We start a new sequence when samp_val is asserted, and this is the
// "active" phase (i.e. the last one) of clk_samp
assign start_spi = samp_val;
// Generate the SPI protocol
always @(posedge clk_i) begin
if (rst_i) begin
active <= 1'b0;
old_active <= 1'b0;
old_old_active <= 1'b0;
bit_cnt <= 5'b00000;
cs_n <= 1'b1; // Active low
spi_mosi <= 1'b1; // Idle at 1'b1
end else begin
old_active <= active;
old_old_active <= old_active;
if (!active) begin
if (start_spi) begin
active <= 1'b1; // Go active
cs_n <= 1'b0; // Set CS active
spi_mosi <= samp[sample_width-1]; // Send the first bit of the seq
bit_cnt <= sample_width-2'd2; // We have already sent sample_width-1
end else begin
cs_n <= 1'b1; // INACTIVE
spi_mosi <= 1'b1;
end
end else begin // we are currently active
spi_mosi <= samp[bit_cnt];
if (bit_cnt == 5'b00000) begin // This is the last bit
active <= 1'b0;
end else begin // Not the last bit
bit_cnt <= bit_cnt - 1'b1;
end
end
end // if rst
end // always
always @(posedge clk_i) begin
if (rst_i) begin
spi_done <= 1'b0;
end else begin
if (bit_cnt == 5'b00001) begin
spi_done <= 1'b1;
end else begin
spi_done <= 1'b0;
end
end
end
// Pipeline the outputs
always @(posedge clk_i) begin
mosi_latch <= spi_mosi;
cs_latch <= cs_n;
end
always @(posedge clk_i) begin
spi_mosi_o <= mosi_latch;
spi_cs_n_o <= cs_latch;
end
// Generate the SPI clock using the DDR flop
// It is based on old_active due to the pipelining of the other
// signals, and it is extended one extra clock to allow for the clocking
// of the last bit (old_old_active).
out_ddr_flop I_OUT_DDR_FLOP_SPI_CLK (
.clk ( clk_i )
,.rst ( 1'b0 )
,.d_rise ( 1'b0 )
,.d_fall ( old_active || old_old_active)
,.q ( spi_clk_o )
);
endmodule
//-----------------------------------------------------------------------------
//
// Copyright (c) 2009 Xilinx Inc.
//
// Project : Programmable Wave Generator
// Module : out_ddr_flop.v
// Parent : Various
// Children : None
//
// Description:
// This is a wrapper around a basic DDR output flop.
// A version of this module with identical ports exists for all target
// technologies for this design (Spartan 3E and Virtex 5).
//
//
// Parameters:
// None
//
// Notes :
//
// Multicycle and False Paths, Timing Exceptions
// None
//
`timescale 1ns/1ps
module out_ddr_flop (
input clk, // Destination clock
input rst, // Reset - synchronous to destination clock
input d_rise, // Data for the rising edge of clock
input d_fall, // Data for the falling edge of clock
output q // Double data rate output
);
//***************************************************************************
// Register declarations
//***************************************************************************
//***************************************************************************
// Code
//***************************************************************************
// ODDR: Output Double Data Rate Output Register with Set, Reset
// and Clock Enable.
// Virtex-4/5
// Xilinx HDL Language Template, version 11.1
ODDRE1 #(
.IS_C_INVERTED(1'b0), // Optional inversion for C
.IS_D1_INVERTED(1'b0), // Optional inversion for D1
.IS_D2_INVERTED(1'b0), // Optional inversion for D2
.SRVAL(1'b0) // Initializes the ODDRE1 Flip-Flops to the specified value (1'b0, 1'b1)
)
ODDRE1_inst (
.Q(q), // 1-bit output: Data output to IOB
.C(clk), // 1-bit input: High-speed clock input
.D1(d_rise), // 1-bit input: Parallel data input 1
.D2(d_fall), // 1-bit input: Parallel data input 2
.SR(rst) // 1-bit input: Active High Async Reset
);
// End of ODDR_inst instantiation
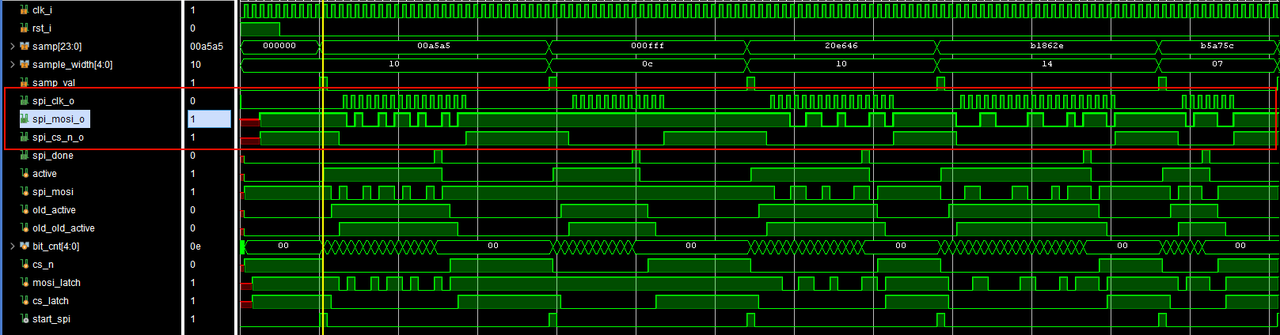
endmodule仿真时序:
【设计文件】spi_driver_low.v
c
`timescale 1ns / 1ps
module spi_driver_low #(
// 参数配置
// 系统时钟频率 / SPI目标频率 = 分频系数
// 例如: 100MHz / 1MHz = 100
parameter CLK_DIV = 100
)(
input wire clk_i,
input wire rst_i,
input wire [23:0] samp,
input wire [ 4:0] samp_width,
input wire samp_val,
output reg spi_clk_o,
output reg spi_mosi_o,
output reg spi_cs_n_o,
output reg spi_done
);
//-------------------------------------------------------------------------
// 常量定义 (状态机与计算)
//-------------------------------------------------------------------------
// 自动计算计数器位宽
// function integer clog2; ... endfunction 在Verilog 2001中通常用常数或手动计算
// 这里为了兼容性,假设分频系数不会超过 8位 (255),如果很大请增加位宽
localparam CNT_WIDTH = 16;
localparam DIV_HALF = CLK_DIV / 2;
// 状态定义 (One-Hot 或 Binary 均可,这里使用简单的 Binary)
localparam S_IDLE = 1'b0;
localparam S_TRANSMIT = 1'b1;
//-------------------------------------------------------------------------
// 寄存器定义
//-------------------------------------------------------------------------
reg state;
reg [CNT_WIDTH-1:0] div_cnt; // 分频计数器
reg [4:0] bit_cnt; // 位计数器
// 输入信号锁存器 (Shadow Registers)
reg [23:0] samp_latched;
reg [4:0] width_latched;
//-------------------------------------------------------------------------
// 主要逻辑
//-------------------------------------------------------------------------
always @(posedge clk_i) begin
if (rst_i) begin
state <= S_IDLE;
spi_cs_n_o <= 1'b1;
spi_mosi_o <= 1'b1;
spi_clk_o <= 1'b0; // CPOL=0 (空闲时低电平)
spi_done <= 1'b0;
div_cnt <= {CNT_WIDTH{1'b0}};
bit_cnt <= 5'd0;
samp_latched <= 24'd0;
width_latched <= 5'd0;
end else begin
// 默认信号行为
spi_done <= 1'b0;
case (state)
//==============================================================
// 空闲状态:等待 samp_val 信号
//==============================================================
S_IDLE: begin
spi_cs_n_o <= 1'b1;
spi_clk_o <= 1'b0;
spi_mosi_o <= 1'b1;
div_cnt <= 0;
if (samp_val) begin
// 1. 锁存输入数据 (防止传输过程中外部数据变化)
samp_latched <= samp;
width_latched <= samp_width;
// 2. 立即拉低 CS (Chip Select)
spi_cs_n_o <= 1'b0;
// 3. 准备发送最高位 (MSB)
// 注意:这里我们假设 sample_width 至少为1
bit_cnt <= samp_width;
// 4. 状态跳转
state <= S_TRANSMIT;
end
end
//==============================================================
// 传输状态:生成时钟并移出数据
//==============================================================
S_TRANSMIT: begin
//--- 分频计数器逻辑 ---
// 不管是不是最后一位,都要让计数器走完整个周期
if (div_cnt == CLK_DIV - 1) begin
div_cnt <= 0;
// 此时距离上一次上升沿已经过了半个 SPI 周期,满足 CS Hold Time
if (bit_cnt == 0) begin
state <= S_IDLE;
spi_done <= 1'b1;
// 下一个周期进 IDLE,CS 才会拉高
end
end else begin
div_cnt <= div_cnt + 1'b1;
end
//--- SPI 时钟与数据移位逻辑 ---
// 1. 周期开始 (Falling Edge): 更新 MOSI 数据
if (div_cnt == 0) begin
spi_clk_o <= 1'b0;
if (bit_cnt > 0)
spi_mosi_o <= samp_latched[bit_cnt - 1'b1];
end
// 2. 周期中间 (Rising Edge): 采样沿,时钟拉高
else if (div_cnt == DIV_HALF) begin
spi_clk_o <= 1'b1;
if (bit_cnt > 0) begin
bit_cnt <= bit_cnt - 1'b1;
end
// 此时 bit_cnt 变成了 0,但我们继续等到 div_cnt == CLK_DIV - 1
end
end
endcase
end
end
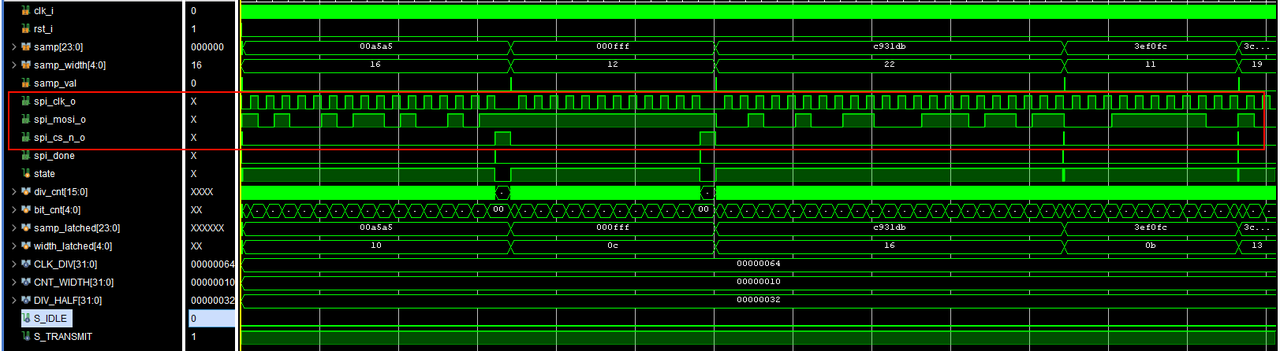
endmodule仿真时序:
【仿真文件】tb_spi_driver.sv
c
`timescale 1ns / 1ps
module tb_spi_driver;
//--------------------------------------------------------------------------
// Signals Declaration
//--------------------------------------------------------------------------
logic clk_i;
logic rst_i;
logic [23:0] samp;
logic [ 4:0] sample_width;
logic samp_val;
logic spi_clk_o;
logic spi_mosi_o;
logic spi_cs_n_o;
logic spi_done;
// Clock definition (100MHz)
parameter CLK_PERIOD = 10;
//--------------------------------------------------------------------------
// DUT Instantiation
//--------------------------------------------------------------------------
spi_driver dut (
.clk_i (clk_i),
.rst_i (rst_i),
.samp (samp),
.sample_width (sample_width),
.samp_val (samp_val),
.spi_clk_o (spi_clk_o),
.spi_mosi_o (spi_mosi_o),
.spi_cs_n_o (spi_cs_n_o),
.spi_done (spi_done)
);
//--------------------------------------------------------------------------
// Clock Generation
//--------------------------------------------------------------------------
initial begin
clk_i = 0;
forever #(CLK_PERIOD/2) clk_i = ~clk_i;
end
//--------------------------------------------------------------------------
// Test Procedure
//--------------------------------------------------------------------------
initial begin
// 1. Initialize Signals
rst_i = 1;
samp = 0;
sample_width = 16;
samp_val = 0;
// 2. Reset Sequence
#(CLK_PERIOD * 5);
rst_i = 0;
#(CLK_PERIOD * 5);
$display("\n--- Simulation Start ---\n");
// 3. Test Case 1: Standard 16-bit transmission
$display("[TEST 1] Sending 0xA5A5 with width 16");
send_sample(24'h00A5A5, 5'd16);
// Wait for a bit of idle time
#(CLK_PERIOD * 10);
// 4. Test Case 2: 12-bit transmission (Common for DACs)
$display("[TEST 2] Sending 0xFFF with width 12");
send_sample(24'h000FFF, 5'd12);
#(CLK_PERIOD * 10);
// 5. Test Case 3: Random Data and Random Width
repeat (5) begin
logic [23:0] rand_data;
logic [4:0] rand_width;
rand_data = $urandom();
// Constrain width between 4 and 24 to be safe/realistic
rand_width = $urandom_range(4, 24);
$display("[TEST RAND] Sending 0x%h with width %0d", rand_data, rand_width);
send_sample(rand_data, rand_width);
#(CLK_PERIOD * 5);
end
#(CLK_PERIOD * 20);
$display("\n--- Simulation Passed ---\n");
$finish;
end
//--------------------------------------------------------------------------
// Driver Task
//--------------------------------------------------------------------------
task send_sample(input logic [23:0] data_in, input logic [4:0] width_in);
// Synchronize to falling edge to drive inputs safely
@(negedge clk_i);
samp = data_in;
sample_width = width_in;
samp_val = 1'b1;
@(negedge clk_i);
samp_val = 1'b0;
// Wait for the transaction to complete
// Note: spi_done signals logical completion, but pipeline delays
// mean physical output might take 1-2 more clocks.
// We wait for CS_N to go high to ensure physical completion.
wait(spi_cs_n_o == 1'b0); // Wait for start
wait(spi_cs_n_o == 1'b1); // Wait for end
endtask
//--------------------------------------------------------------------------
// Monitor / Scoreboard (SPI Protocol Checker)
//--------------------------------------------------------------------------
logic [23:0] captured_data;
int bit_index;
initial begin
forever begin
// Wait for Chip Select to go Active (Low)
@(negedge spi_cs_n_o);
captured_data = 0;
bit_index = 0;
// Capture Loop
// While CS is low, we shift in bits.
// Based on the DUT logic and DDR flop:
// The DUT updates MOSI on posedge clk_i.
// SPI_CLK is generated via DDR: Low on rise, High on fall (if active).
// This creates a clock roughly inverted to clk_i.
// We sample on the rising edge of SPI_CLK (middle of bit stable time).
while (spi_cs_n_o == 1'b0) begin
@(posedge spi_clk_o or posedge spi_cs_n_o);
if (spi_cs_n_o == 1'b1) break; // Exit if CS went high asynchronously
// Shift in the bit (MSB first protocol)
captured_data = {captured_data[22:0], spi_mosi_o};
bit_index++;
end
// Verify
// Note: captured_data contains the bits shifted in.
// We need to mask the input 'samp' to the width we tested to compare correctly.
verify_data(captured_data, samp, sample_width);
end
end
function void verify_data(logic [23:0] rx_data, logic [23:0] tx_data, logic [4:0] width);
logic [23:0] expected_masked;
// Create a mask for the expected data based on width
// Example: width 4 -> mask 0x00000F
// The DUT sends samp[width-1] down to samp[0].
// Our captured data is right-aligned because we shifted left.
// So rx_data should match tx_data[width-1 : 0].
logic [23:0] tx_masked;
// Mask the upper bits of tx_data that weren't sent
if (width == 24)
tx_masked = tx_data;
else
tx_masked = tx_data & ((1 << width) - 1);
if (rx_data !== tx_masked) begin
$error("[SCB] Mismatch! Width: %0d", width);
$error(" Sent (masked): 0x%h", tx_masked);
$error(" Recv : 0x%h", rx_data);
end else begin
$display("[SCB] Match! Recv: 0x%h (Width: %0d)", rx_data, width);
end
endfunction
endmoduleSPI从机
【设计文件】spi_slave.v
c
module spi_slave #(
parameter DATA_WIDTH = 8,
parameter CPOL = 0, // 0: Idle Low, 1: Idle High
parameter CPHA = 0 // 0: Sample 1st edge, 1: Sample 2nd edge
)(
// 系统接口
input wire i_clk, // 系统时钟
input wire i_rst_n, // 同步复位,低电平有效
// SPI 物理接口
input wire i_spi_sclk,
input wire i_spi_cs_n,
input wire i_spi_mosi,
output wire o_spi_miso, // 顺手加上 o_ 前缀保持风格统一
// 用户接口
input wire [DATA_WIDTH-1:0] i_tx_data, // 预备发送的数据
output reg [DATA_WIDTH-1:0] o_rx_data, // 接收到的数据
output reg o_rx_done, // 接收完成脉冲
output reg o_tx_done // 发送完成脉冲
);
// ============================================================
// 1. 跨时钟域同步 (CDC)
// ============================================================
reg [2:0] sclk_sync;
reg [2:0] cs_n_sync;
reg [1:0] mosi_sync;
// 修改点:同步复位
always @(posedge i_clk) begin
if (!i_rst_n) begin
// 复位值根据 CPOL 设定,防止复位瞬间产生误判
sclk_sync <= (CPOL) ? 3'b111 : 3'b000;
cs_n_sync <= 3'b111;
mosi_sync <= 2'b00;
end else begin
sclk_sync <= {sclk_sync[1:0], i_spi_sclk};
cs_n_sync <= {cs_n_sync[1:0], i_spi_cs_n};
mosi_sync <= {mosi_sync[0], i_spi_mosi};
end
end
// 内部净信号
wire sclk_clean = sclk_sync[1];
wire cs_n_clean = cs_n_sync[1];
wire mosi_clean = mosi_sync[1];
// CS_N 下降沿检测 (用于 CPHA=0 数据预加载)
wire cs_n_negedge = (cs_n_sync[2] == 1'b1 && cs_n_sync[1] == 1'b0);
// ============================================================
// 2. 边沿检测逻辑 (支持 CPOL)
// ============================================================
wire sclk_rise = (sclk_sync[2:1] == 2'b01);
wire sclk_fall = (sclk_sync[2:1] == 2'b10);
// 前沿与后沿定义
wire leading_edge = (CPOL == 0) ? sclk_rise : sclk_fall;
wire trailing_edge = (CPOL == 0) ? sclk_fall : sclk_rise;
// 采样与移位使能
wire sample_en = (CPHA == 0) ? leading_edge : trailing_edge;
wire shift_en = (CPHA == 0) ? trailing_edge : leading_edge;
// ============================================================
// 3. 计数器逻辑
// ============================================================
reg [3:0] bit_cnt;
// 修改点:同步复位
always @(posedge i_clk) begin
if (!i_rst_n)
bit_cnt <= 0;
else if (cs_n_clean)
bit_cnt <= 0;
else if (sample_en) begin
if (bit_cnt == DATA_WIDTH - 1)
bit_cnt <= 0;
else
bit_cnt <= bit_cnt + 1;
end
end
// ============================================================
// 4. 接收逻辑 (RX) - MOSI
// ============================================================
reg [DATA_WIDTH-1:0] rx_shift_reg;
// 修改点:同步复位
always @(posedge i_clk) begin
if (!i_rst_n) begin
rx_shift_reg <= 0;
o_rx_data <= 0;
o_rx_done <= 0;
end else if (cs_n_clean) begin
o_rx_done <= 0;
end else begin
o_rx_done <= 0;
if (sample_en) begin
rx_shift_reg <= {rx_shift_reg[DATA_WIDTH-2:0], mosi_clean};
// 接收完最后一位
if (bit_cnt == DATA_WIDTH - 1) begin
o_rx_data <= {rx_shift_reg[DATA_WIDTH-2:0], mosi_clean};
o_rx_done <= 1'b1;
end
end
end
end
// ============================================================
// 5. 发送逻辑 (TX) - MISO
// ============================================================
reg [DATA_WIDTH-1:0] tx_shift_reg;
reg miso_out_reg;
// 修改点:同步复位
always @(posedge i_clk) begin
if (!i_rst_n) begin
tx_shift_reg <= 0;
miso_out_reg <= 0;
o_tx_done <= 0;
end else if (cs_n_clean) begin
miso_out_reg <= 0;
o_tx_done <= 0;
end else begin
o_tx_done <= 0;
// CPHA=0: CS下降沿预加载
if (CPHA == 0 && cs_n_negedge) begin
tx_shift_reg <= {i_tx_data[DATA_WIDTH-2:0], 1'b0};
miso_out_reg <= i_tx_data[DATA_WIDTH-1];
end
// CPHA=1: CS下降沿预装载 (等待第一个沿发送)
else if (CPHA == 1 && cs_n_negedge) begin
tx_shift_reg <= i_tx_data;
end
// 正常移位
else if (shift_en) begin
miso_out_reg <= tx_shift_reg[DATA_WIDTH-1];
tx_shift_reg <= {tx_shift_reg[DATA_WIDTH-2:0], 1'b0};
if (bit_cnt == DATA_WIDTH - 1)
o_tx_done <= 1'b1;
end
end
end
// ============================================================
// 6. 三态控制
// ============================================================
assign o_spi_miso = (cs_n_clean) ? 1'bz : miso_out_reg;
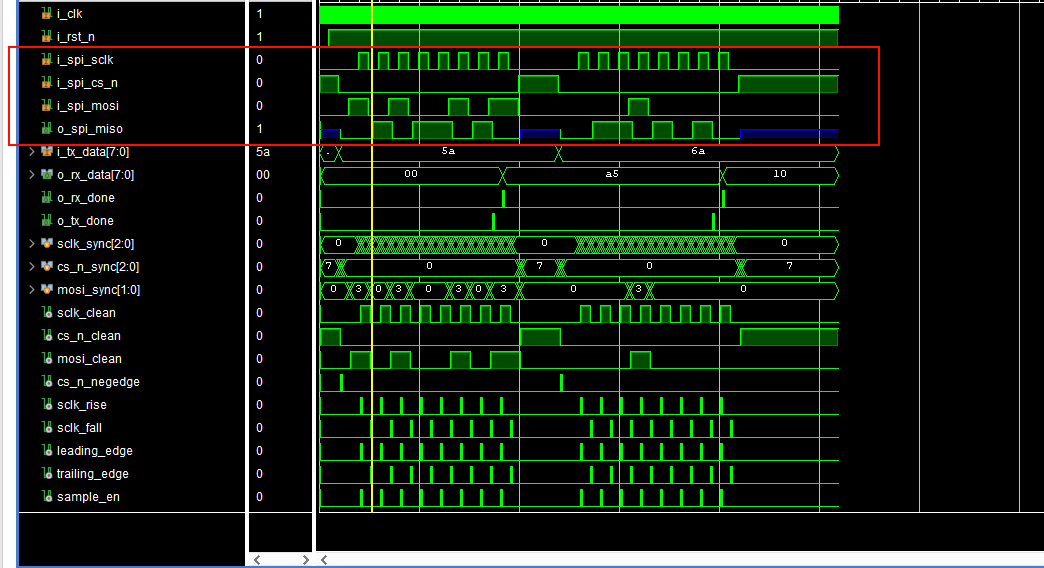
endmodule仿真时序:
【仿真文件】tb_spi_slave.sv
c
`timescale 1ns / 1ps
module tb_spi_slave;
// =========================================================================
// 1. 参数配置
// =========================================================================
parameter DATA_WIDTH = 8;
// 修改这里来测试不同的 SPI 模式 (0, 1, 2, 3)
// Mode 0: CPOL=0, CPHA=0
// Mode 3: CPOL=1, CPHA=1
parameter CPOL = 0;
parameter CPHA = 0;
parameter CLK_PERIOD = 10; // 系统时钟 100MHz (10ns)
parameter SPI_PERIOD = 100; // SPI时钟 10MHz (100ns) - 确保满足过采样要求
// =========================================================================
// 2. 信号声明
// =========================================================================
logic i_clk;
logic i_rst_n;
// SPI 物理接口
logic i_spi_sclk;
logic i_spi_cs_n;
logic i_spi_mosi;
wire o_spi_miso; // MISO 是双向/三态信号,使用 wire
// 用户接口
logic [DATA_WIDTH-1:0] i_tx_data;
logic [DATA_WIDTH-1:0] o_rx_data;
logic o_rx_done;
logic o_tx_done;
// Testbench 内部变量
logic [DATA_WIDTH-1:0] master_rx_data; // 主机接收到的数据
// =========================================================================
// 3. DUT 例化
// =========================================================================
spi_slave #(
.DATA_WIDTH (DATA_WIDTH),
.CPOL (CPOL),
.CPHA (CPHA)
) dut (
.i_clk (i_clk),
.i_rst_n (i_rst_n),
.i_spi_sclk (i_spi_sclk),
.i_spi_cs_n (i_spi_cs_n),
.i_spi_mosi (i_spi_mosi),
.o_spi_miso (o_spi_miso),
.i_tx_data (i_tx_data),
.o_rx_data (o_rx_data),
.o_rx_done (o_rx_done),
.o_tx_done (o_tx_done)
);
// =========================================================================
// 4. 时钟生成
// =========================================================================
initial i_clk = 0;
always #(CLK_PERIOD/2) i_clk = ~i_clk;
// =========================================================================
// 5. 测试主流程
// =========================================================================
initial begin
// --- 初始化 ---
i_rst_n = 0;
i_spi_cs_n = 1;
i_spi_mosi = 0;
i_tx_data = 0;
// SCLK 初始状态取决于 CPOL
i_spi_sclk = (CPOL) ? 1'b1 : 1'b0;
$display("---------------------------------------------------");
$display("Simulation Start: SPI Mode (CPOL=%0d, CPHA=%0d)", CPOL, CPHA);
$display("---------------------------------------------------");
// --- 复位序列 (同步复位) ---
repeat(5) @(posedge i_clk);
i_rst_n = 1;
repeat(5) @(posedge i_clk);
// --- Test Case 1: 单字节传输 ---
// 主机发 0xA5, 从机发 0x5A
$display("[Test 1] Master sends 0xA5, Slave sends 0x5A");
// 1. 设置从机要发送的数据
i_tx_data = 8'h5A;
// 2. 启动主机传输任务 (Master Sending 0xA5)
spi_master_xfer(8'hA5, master_rx_data);
// 3. 检查结果
check_result(8'hA5, o_rx_data, "Slave RX");
check_result(8'h5A, master_rx_data, "Master RX (MISO)");
#(CLK_PERIOD * 20); // 插入空闲时间
// --- Test Case 2: 随机数据传输 ---
$display("[Test 2] Random Data Transfer");
begin
logic [7:0] rand_m_data, rand_s_data;
rand_m_data = $urandom();
rand_s_data = $urandom();
i_tx_data = rand_s_data;
spi_master_xfer(rand_m_data, master_rx_data);
check_result(rand_m_data, o_rx_data, "Slave RX");
check_result(rand_s_data, master_rx_data, "Master RX");
end
// --- Test Case 3: 验证 Done 信号 ---
if (o_rx_done && o_tx_done)
$display("[Signal Check] Done flags asserted correctly.");
else
$error("[Signal Check] Done flags failed to assert!");
#(CLK_PERIOD * 50);
$display("---------------------------------------------------");
$display("Simulation Finished: PASS");
$finish;
end
// =========================================================================
// 6. 任务:模拟 SPI 主机传输 (Bus Functional Model)
// =========================================================================
task spi_master_xfer(
input logic [DATA_WIDTH-1:0] data_out, // 主机发送的数据
output logic [DATA_WIDTH-1:0] data_in // 主机接收的数据 (MISO)
);
integer i;
logic leading_edge_val;
logic trailing_edge_val;
// 根据 CPOL 定义边沿电平
// CPOL=0: Idle=0, Leading=1(Rise), Trailing=0(Fall)
// CPOL=1: Idle=1, Leading=0(Fall), Trailing=1(Rise)
leading_edge_val = (CPOL) ? 1'b0 : 1'b1;
trailing_edge_val = (CPOL) ? 1'b1 : 1'b0;
// 1. 拉低 CS_N 开始传输
i_spi_cs_n = 0;
// Setup time (CS falling to first clock edge)
#(SPI_PERIOD/2);
// 2. 循环传输位
for (i = DATA_WIDTH-1; i >= 0; i--) begin
// --- CPHA=0: Data Setup -> Leading Edge (Sample) -> Trailing Edge (Shift) ---
if (CPHA == 0) begin
// 在前沿之前建立数据 (MOSI)
i_spi_mosi = data_out[i];
#(SPI_PERIOD/2);
// Leading Edge (Sample by Slave)
i_spi_sclk = leading_edge_val;
// 主机在此刻采样 MISO (模拟真实硬件行为,虽然从机是在CS下降沿放数据的)
data_in[i] = o_spi_miso;
#(SPI_PERIOD/2);
// Trailing Edge (Shift by Slave)
i_spi_sclk = trailing_edge_val;
end
// --- CPHA=1: Leading Edge (Shift) -> Trailing Edge (Sample) ---
else begin
// Leading Edge (Slave outputs data)
i_spi_sclk = leading_edge_val;
// 主机更新 MOSI (在第一个边沿之后)
i_spi_mosi = data_out[i];
#(SPI_PERIOD/2);
// Trailing Edge (Sample by Slave)
i_spi_sclk = trailing_edge_val;
// 主机采样 MISO
data_in[i] = o_spi_miso;
#(SPI_PERIOD/2);
end
end
// 3. 传输结束
// Hold time (Last clock edge to CS rising)
#(SPI_PERIOD/2);
i_spi_cs_n = 1;
i_spi_mosi = 0; // Return to 0 (optional)
// 恢复 SCLK 空闲电平 (其实上面循环结束已经是空闲电平了,这里为了保险)
i_spi_sclk = (CPOL) ? 1'b1 : 1'b0;
endtask
// =========================================================================
// 7. 辅助任务:结果检查
// =========================================================================
task check_result(
input logic [DATA_WIDTH-1:0] expected,
input logic [DATA_WIDTH-1:0] actual,
input string desc
);
if (expected === actual) begin
$display("[PASS] %s: Expected 0x%h, Got 0x%h", desc, expected, actual);
end else begin
$error("[FAIL] %s: Expected 0x%h, Got 0x%h", desc, expected, actual);
end
endtask
endmodule优点 & 缺点:
SPI 协议因其高效和简单的硬件实现而备受青睐,主要优点包括:
- 通信性能高:
- 全双工通信:SPI 默认支持全双工通信(同时发送和接收数据)。
- 高吞吐量:相比 I²C 或 SMBus,SPI 通常能提供更高的数据传输速率。
- 无速率上限:SPI 协议本身没有定义最大时钟频率,速度主要受限于设备本身和布线物理特性。
- 硬件与协议简单灵活:
- 硬件实现简单:从机(Slave)硬件只需一个移位寄存器,且不需要精密的振荡器(直接使用主机的时钟信号)。
- 无需收发器:与 CAN 总线不同,SPI 不需要专门的收发器芯片。
- 协议灵活:传输不限于 8 位字节,消息的大小、内容和用途可以任意选择。
- 寻址与连接优势:
- 无需复杂寻址:从机不需要像 I²C、GPIB 或 SCSI 那样拥有唯一的地址,而是通过片选信号(SS)进行选择。
- 无总线仲裁:由于是单主设备架构,不存在总线仲裁问题及其相关的故障模式。
- 低功耗:由于电路更少(例如不需要上拉电阻),其功耗通常低于 I²C 或 SMBus。
- 菊花链支持:在菊花链(Daisy chain)配置下,即使连接多个设备也不需要额外的片选信号线。
尽管 SPI 速度快,但它缺乏一些现代通信协议的标准特性,主要缺点如下:
- 引脚占用与物理限制:
- 引脚较多:相比 I²C,SPI 需要更多的 IC 封装引脚(即使是三线变体也是如此)。
- 距离受限:仅适用于短距离通信,传输距离远小于 RS-232、RS-485 或 CAN 总线。
- 多从机扩展性差:如果多个从机需要不同的 SPI 模式(极性/相位),主机会频繁重新初始化,导致访问速度变慢。
- 缺乏标准化:
- 无正式标准:SPI 没有正式的标准化组织制定标准,导致无法验证一致性。
- 变体众多:存在许多不同的变体,这使得不同设备间的支持和兼容变得复杂。
- 缺乏内置协议功能:
- 无硬件流控:从机没有硬件流控机制(但主机可以通过延迟时钟边缘来降低速率)。
- 无应答机制:没有硬件从机应答(ACK),主机可能在向不存在的设备发送数据而并不知情。
- 无错误检查:协议本身不包含数据错误检查机制。
- 不支持热插拔:协议不支持动态添加节点(热插拔)。
- 中断处理:中断功能不在 SPI 协议范围内,必须通过额外的带外信号实现。
总结来说,SPI 非常适合对速率要求高、距离短且硬件简单的场景,但在需要复杂错误处理、长距离传输或极少引脚的应用中,可能不如其他总线协议合适。