目录
[15.1 引言](#15.1 引言)
[15.2 离散马尔科夫过程](#15.2 离散马尔科夫过程)
[代码实战:离散马尔可夫链模拟 + 可视化](#代码实战:离散马尔可夫链模拟 + 可视化)
[15.3 隐马尔科夫模型](#15.3 隐马尔科夫模型)
[核心组成(4 要素)](#核心组成(4 要素))
[Mermaid 流程图:HMM 结构](#Mermaid 流程图:HMM 结构)
[代码实战:定义 HMM 模型并可视化结构](#代码实战:定义 HMM 模型并可视化结构)
[15.4 HMM 的三个基本问题](#15.4 HMM 的三个基本问题)
[Mermaid 思维导图:HMM 三个基本问题](#Mermaid 思维导图:HMM 三个基本问题)
[15.5 估值问题](#15.5 估值问题)
[代码实战:前向算法实现 + 效果对比](#代码实战:前向算法实现 + 效果对比)
[15.6 寻找状态序列(解码问题)](#15.6 寻找状态序列(解码问题))
[代码实战:Viterbi 算法实现 + 可视化](#代码实战:Viterbi 算法实现 + 可视化)
[15.7 学习模型参数(Baum-Welch 算法)](#15.7 学习模型参数(Baum-Welch 算法))
[代码实战:Baum-Welch 算法实现](#代码实战:Baum-Welch 算法实现)
[15.8 连续观测](#15.8 连续观测)
[代码实战:连续观测 HMM 实现](#代码实战:连续观测 HMM 实现)
[15.9 HMM 作为图模型](#15.9 HMM 作为图模型)
[Mermaid 图:HMM 概率图模型](#Mermaid 图:HMM 概率图模型)
[15.10 HMM 中的模型选择](#15.10 HMM 中的模型选择)
[代码实战:HMM 模型选择(BIC 准则)](#代码实战:HMM 模型选择(BIC 准则))
[15.11 注释](#15.11 注释)
[15.12 习题](#15.12 习题)
[15.13 参考文献](#15.13 参考文献)
前言

大家好!今天给大家分享《机器学习导论》第 15 章的核心内容 ------ 隐马尔可夫模型(HMM)。HMM 作为经典的序列建模工具,在语音识别、自然语言处理、生物信息学等领域应用广泛,但很多同学觉得它抽象难懂。
这篇文章我会尽量避开复杂公式,用通俗的比喻、直观的可视化图表,再配上可直接运行的 Python 完整代码,带你从马尔可夫过程到 HMM 实战,彻底搞懂这个经典模型!
15.1 引言
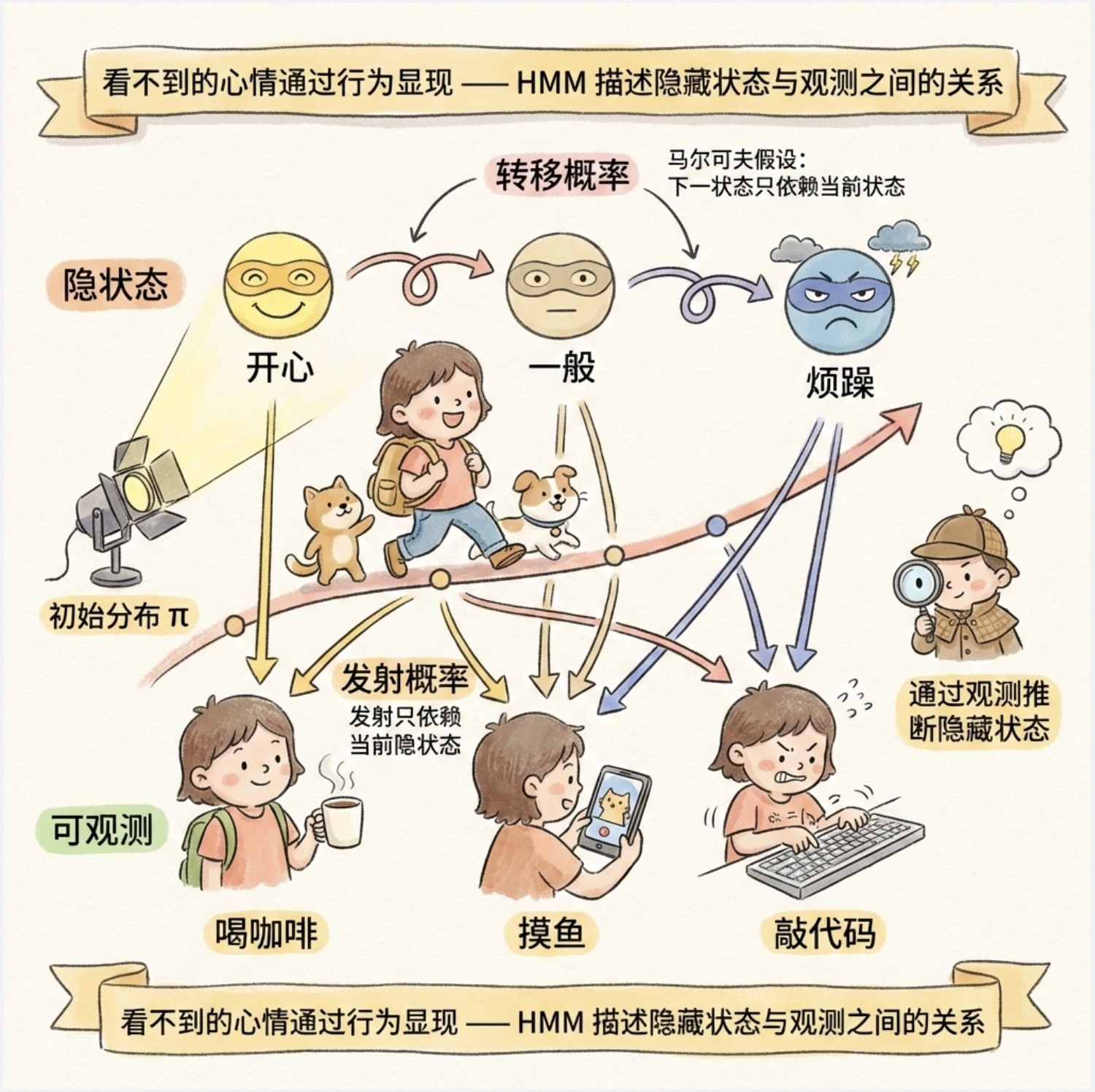
想象一下:你每天上班的状态(开心、一般、烦躁)是 "隐藏" 的,别人看不到,但能通过你的行为(喝咖啡、摸鱼、敲代码)"观察" 到。隐马尔可夫模型(HMM)就是描述这种 "隐藏状态" 和 "可观测行为" 之间关系的模型。
HMM 的核心特点:
- 隐藏状态是马尔可夫过程(下一状态只依赖当前状态)
- 观测值只依赖当前隐藏状态
- 隐藏状态不可直接观测,只能通过观测值推断
15.2 离散马尔科夫过程

离散马尔可夫过程(简称马尔可夫链)是 HMM 的基础,核心是 "无记忆性":未来状态只取决于当前状态,与过去无关。
通俗比喻
你玩掷骰子游戏,每一轮的点数(状态)只和当前轮次有关,和上一轮掷出几点没关系 ------ 这就是最简单的马尔可夫性。
代码实战:离散马尔可夫链模拟 + 可视化
import numpy as np
import matplotlib.pyplot as plt
import warnings
warnings.filterwarnings('ignore')
# Mac系统Matplotlib中文显示配置
plt.rcParams['font.sans-serif'] = ['Arial Unicode MS', 'DejaVu Sans']
plt.rcParams['axes.unicode_minus'] = False
plt.rcParams['font.family'] = 'sans-serif'
plt.rcParams['font.family'] = 'Arial Unicode MS'
plt.rcParams['axes.facecolor'] = 'white'
# 定义马尔可夫链参数:3个状态(0: 晴天, 1: 阴天, 2: 雨天)
# 状态转移矩阵:transition[i][j]表示从状态i转移到状态j的概率
transition = np.array([
[0.7, 0.2, 0.1], # 晴天→晴天(70%)、阴天(20%)、雨天(10%)
[0.3, 0.5, 0.2], # 阴天→晴天(30%)、阴天(50%)、雨天(20%)
[0.1, 0.3, 0.6] # 雨天→晴天(10%)、阴天(30%)、雨天(60%)
])
# 初始状态概率:初始是晴天(60%)、阴天(30%)、雨天(10%)
init_prob = np.array([0.6, 0.3, 0.1])
# 模拟马尔可夫链过程
def simulate_markov_chain(transition, init_prob, steps=100):
"""
模拟离散马尔可夫链
:param transition: 状态转移矩阵
:param init_prob: 初始状态概率
:param steps: 模拟步数
:return: 状态序列
"""
n_states = transition.shape[0]
states = np.zeros(steps, dtype=int)
# 初始化第一个状态
states[0] = np.random.choice(n_states, p=init_prob)
# 迭代生成后续状态
for t in range(1, steps):
current_state = states[t-1]
states[t] = np.random.choice(n_states, p=transition[current_state])
return states
# 执行模拟
np.random.seed(42) # 固定随机种子,保证结果可复现
steps = 100
states = simulate_markov_chain(transition, init_prob, steps)
# 可视化:状态序列+转移概率矩阵热力图
fig, (ax1, ax2) = plt.subplots(1, 2, figsize=(12, 5))
# 子图1:状态序列变化
state_names = ['晴天', '阴天', '雨天']
ax1.plot(range(steps), states, marker='o', markersize=4, linewidth=1)
ax1.set_yticks([0, 1, 2])
ax1.set_yticklabels(state_names)
ax1.set_xlabel('时间步')
ax1.set_ylabel('状态')
ax1.set_title('离散马尔可夫链状态序列(100步)')
ax1.grid(alpha=0.3)
# 子图2:转移概率矩阵热力图
im = ax2.imshow(transition, cmap='Blues', aspect='auto')
ax2.set_xticks([0, 1, 2])
ax2.set_yticks([0, 1, 2])
ax2.set_xticklabels(state_names)
ax2.set_yticklabels(state_names)
ax2.set_xlabel('转移后状态')
ax2.set_ylabel('转移前状态')
ax2.set_title('状态转移概率矩阵')
# 添加数值标注
for i in range(3):
for j in range(3):
text = ax2.text(j, i, f'{transition[i,j]:.1f}',
ha="center", va="center", color="black")
# 颜色条
cbar = plt.colorbar(im, ax=ax2, shrink=0.8)
cbar.set_label('概率')
plt.tight_layout()
plt.show()
# 统计各状态出现次数
state_counts = np.bincount(states)
print("各状态出现次数:")
for i, name in enumerate(state_names):
print(f"{name}: {state_counts[i]}次(占比{state_counts[i]/steps:.2f})")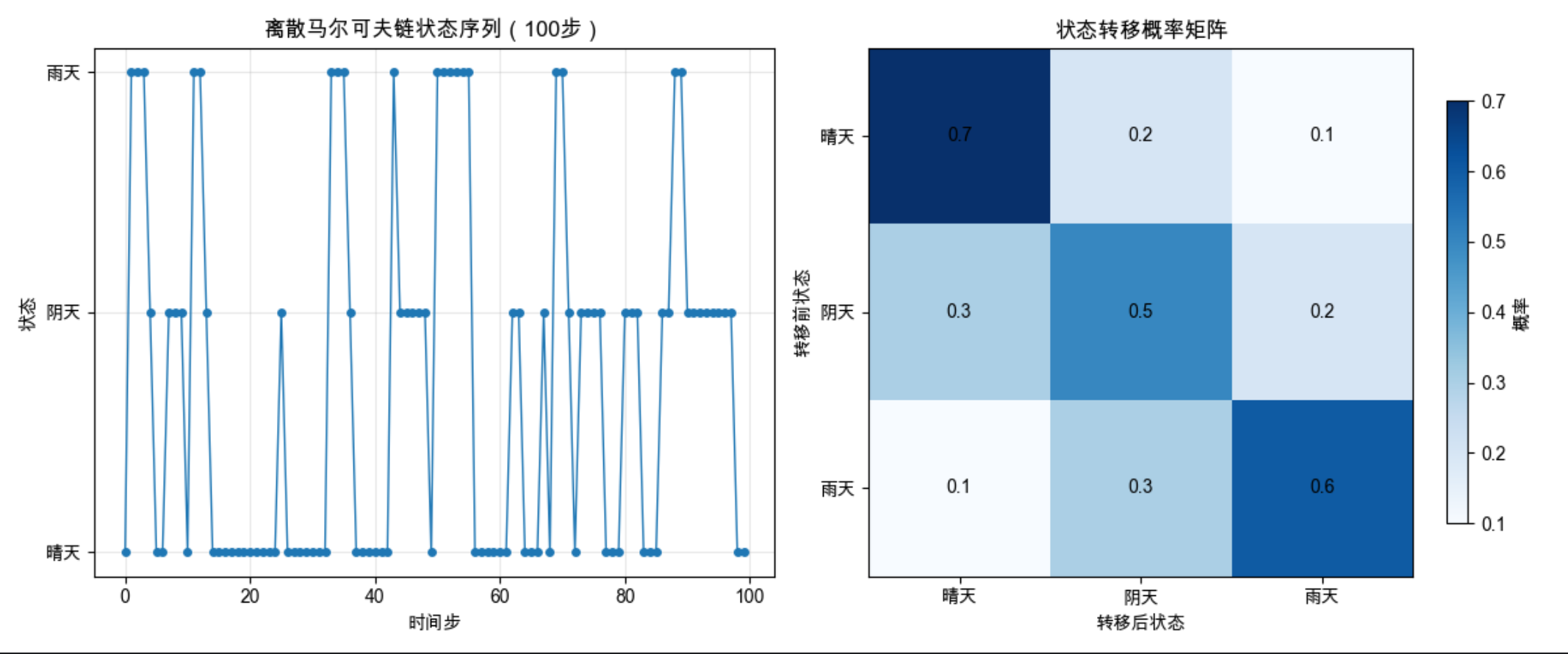
运行效果
- 左图:100 步马尔可夫链的状态变化曲线,能直观看到状态的转移规律
- 右图:转移概率矩阵热力图,颜色越深表示转移概率越高
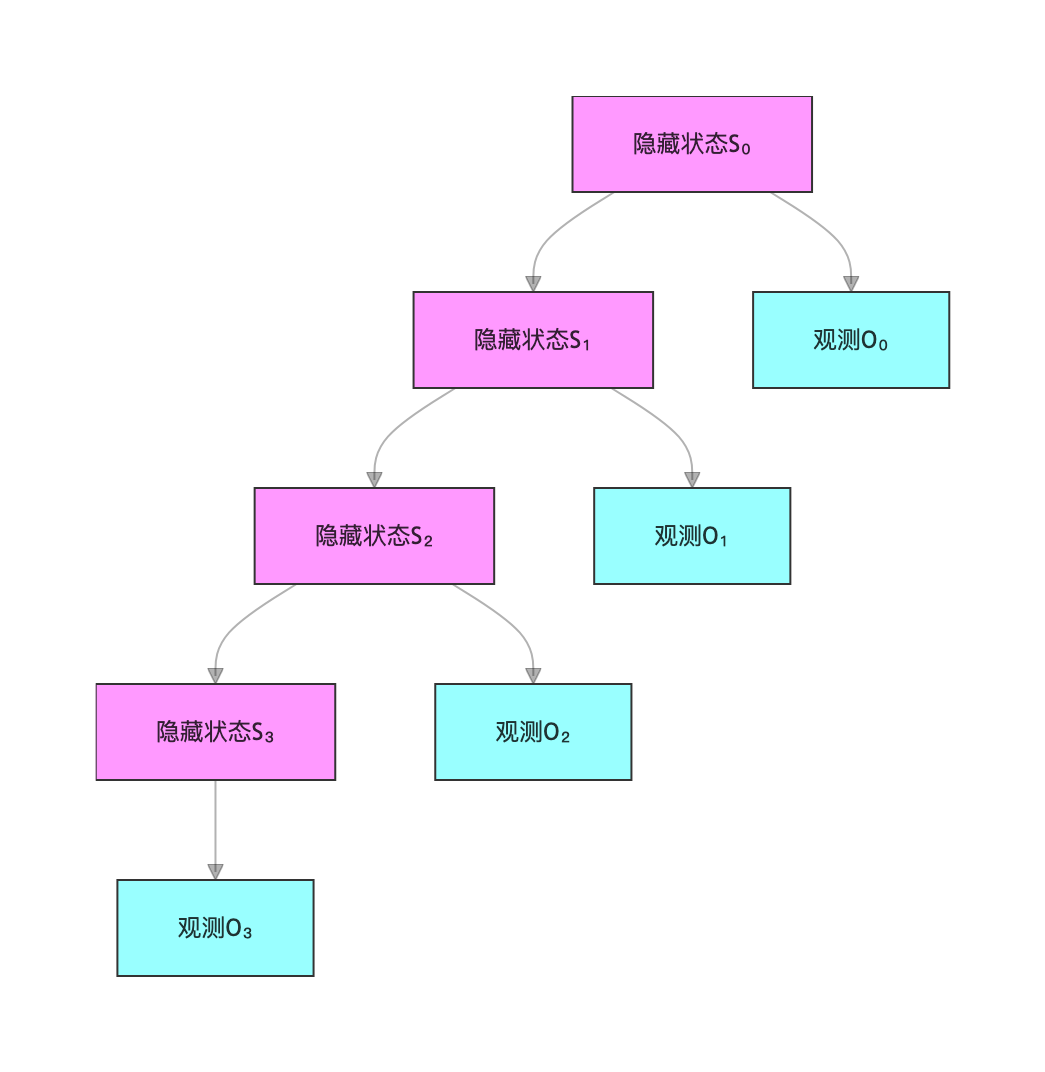
15.3 隐马尔科夫模型
HMM 是在马尔可夫链基础上增加了 "观测层"------ 隐藏状态不可见,只能通过观测值间接推断。
核心组成(4 要素)
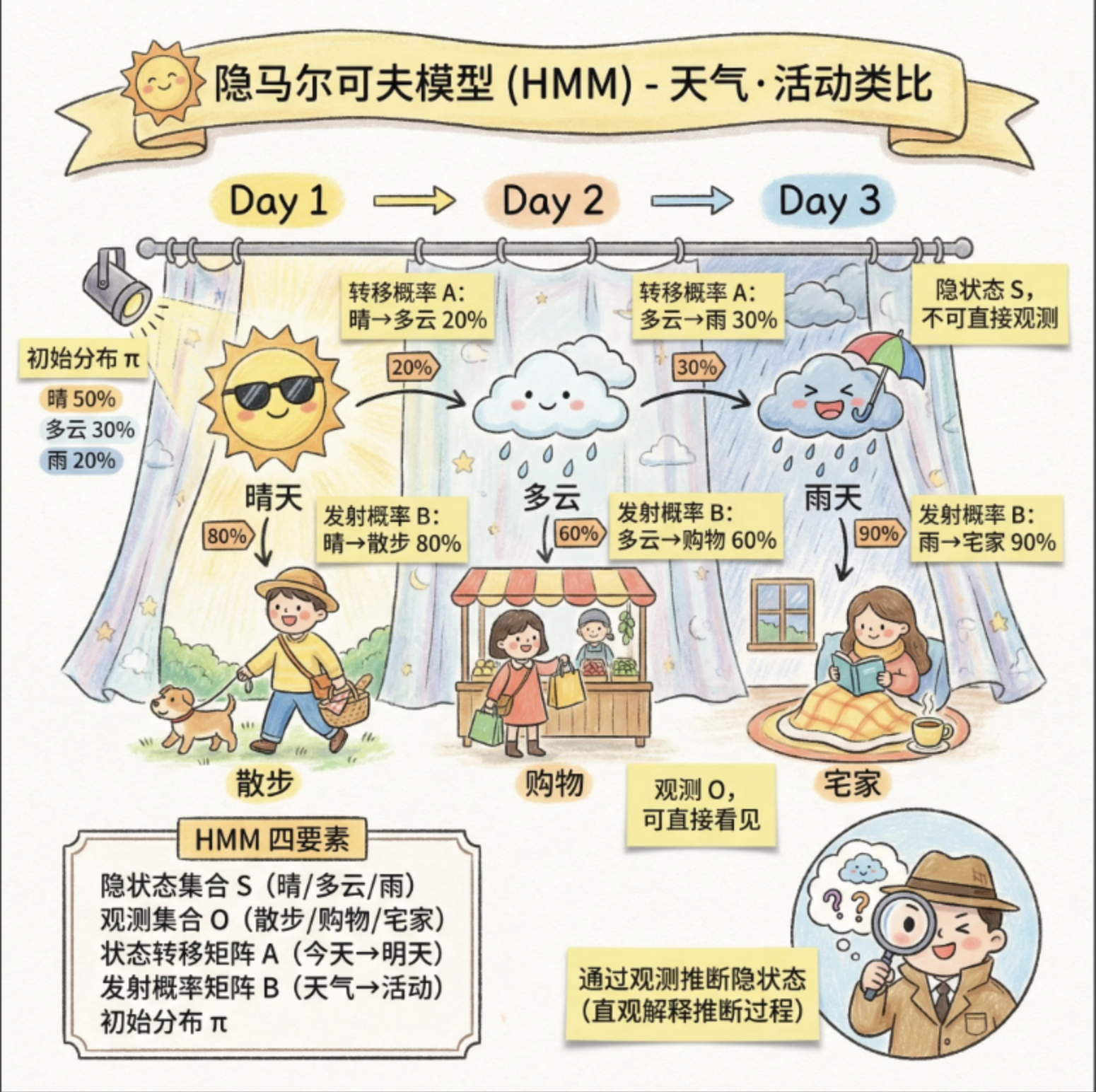
用 "天气 - 活动" 的例子通俗解释:
- 隐藏状态集合(S):晴天、阴天、雨天(不可直接看到)
- 观测状态集合(O):散步、购物、宅家(能直接看到的行为)
- 状态转移矩阵(A):今天→明天的天气转移概率(如晴天→阴天 20%)
- 观测概率矩阵(B):某天气下做某活动的概率(如晴天→散步 80%)
- 初始状态概率(π):第一天是晴天 / 阴天 / 雨天的概率

通俗比喻
你朋友每天在家,你看不到他那边的天气(隐藏状态),但能通过他发的朋友圈知道他做了什么(观测状态:散步 / 购物 / 宅家)。HMM 就是通过他的行为序列,推断他那边的天气序列,或计算某个行为序列出现的概率。
流程图:HMM 结构
代码实战:定义 HMM 模型并可视化结构
import numpy as np
import matplotlib.pyplot as plt
from matplotlib.patches import Ellipse, Rectangle
# 配置中文显示(同上)
plt.rcParams['font.sans-serif'] = ['Arial Unicode MS', 'DejaVu Sans']
plt.rcParams['axes.unicode_minus'] = False
plt.rcParams['font.family'] = 'sans-serif'
plt.rcParams['font.family'] = 'Arial Unicode MS'
plt.rcParams['axes.facecolor'] = 'white'
# 定义HMM四要素
# 1. 隐藏状态:0=晴天, 1=阴天, 2=雨天
hidden_states = ['晴天', '阴天', '雨天']
n_hidden = len(hidden_states)
# 2. 观测状态:0=散步, 1=购物, 2=宅家
obs_states = ['散步', '购物', '宅家']
n_obs = len(obs_states)
# 3. 初始状态概率π
pi = np.array([0.6, 0.3, 0.1])
# 4. 状态转移矩阵A
A = np.array([
[0.7, 0.2, 0.1],
[0.3, 0.5, 0.2],
[0.1, 0.3, 0.6]
])
# 5. 观测概率矩阵B
B = np.array([
[0.8, 0.1, 0.1], # 晴天→散步80%、购物10%、宅家10%
[0.2, 0.6, 0.2], # 阴天→散步20%、购物60%、宅家20%
[0.1, 0.1, 0.8] # 雨天→散步10%、购物10%、宅家80%
])
# 可视化HMM结构(隐藏层+观测层)
fig, ax = plt.subplots(figsize=(10, 6))
# 绘制隐藏状态节点(椭圆)
hidden_pos = [(1, 3), (3, 3), (5, 3)]
for i, (x, y) in enumerate(hidden_pos):
ellipse = Ellipse((x, y), 0.8, 0.5, color='#f9f', ec='black')
ax.add_patch(ellipse)
ax.text(x, y, hidden_states[i], ha='center', va='center', fontsize=10)
# 绘制观测状态节点(矩形)
obs_pos = [(1, 1.5), (3, 1.5), (5, 1.5)]
for i, (x, y) in enumerate(obs_pos):
rect = Rectangle((x-0.4, y-0.25), 0.8, 0.5, color='#9ff', ec='black')
ax.add_patch(rect)
ax.text(x, y, obs_states[i], ha='center', va='center', fontsize=10)
# 绘制隐藏状态转移边
for i in range(n_hidden):
for j in range(n_hidden):
if A[i,j] > 0:
x1, y1 = hidden_pos[i]
x2, y2 = hidden_pos[j]
# 避免自环重叠,微调自环位置
if i == j:
ax.annotate(f'{A[i,j]:.1f}', xy=(x1+0.2, y1+0.2), xytext=(x1+0.5, y1+0.5),
arrowprops=dict(arrowstyle='->', lw=1, alpha=0.7), ha='center')
else:
ax.arrow(x1, y1, x2-x1, y2-y1, head_width=0.05, length_includes_head=True,
alpha=A[i,j], lw=1, ec='black')
ax.text((x1+x2)/2, (y1+y2)/2, f'{A[i,j]:.1f}', ha='center', va='bottom')
# 绘制隐藏→观测的边
for i in range(n_hidden):
for j in range(n_obs):
if B[i,j] > 0:
x1, y1 = hidden_pos[i]
x2, y2 = obs_pos[j]
ax.arrow(x1, y1-0.25, x2-x1, y2-y1+0.25, head_width=0.05, length_includes_head=True,
alpha=B[i,j], lw=1, ec='blue')
ax.text((x1+x2)/2, (y1+y2)/2, f'{B[i,j]:.1f}', ha='center', va='center', color='blue')
# 标注图层
ax.text(3, 3.8, '隐藏状态层(天气)', ha='center', fontsize=12, fontweight='bold')
ax.text(3, 2.2, '状态转移(A)', ha='center', fontsize=10, color='black')
ax.text(3, 1.8, '观测概率(B)', ha='center', fontsize=10, color='blue')
ax.text(3, 0.8, '观测状态层(活动)', ha='center', fontsize=12, fontweight='bold')
ax.set_xlim(0, 6)
ax.set_ylim(0, 4)
ax.set_aspect('equal')
ax.axis('off')
ax.set_title('隐马尔可夫模型(HMM)结构示意图', fontsize=14, pad=20)
plt.tight_layout()
plt.show()
# 输出HMM核心参数
print("=== HMM核心参数 ===")
print("初始状态概率π:", pi)
print("\n状态转移矩阵A:")
print(A)
print("\n观测概率矩阵B:")
print(B)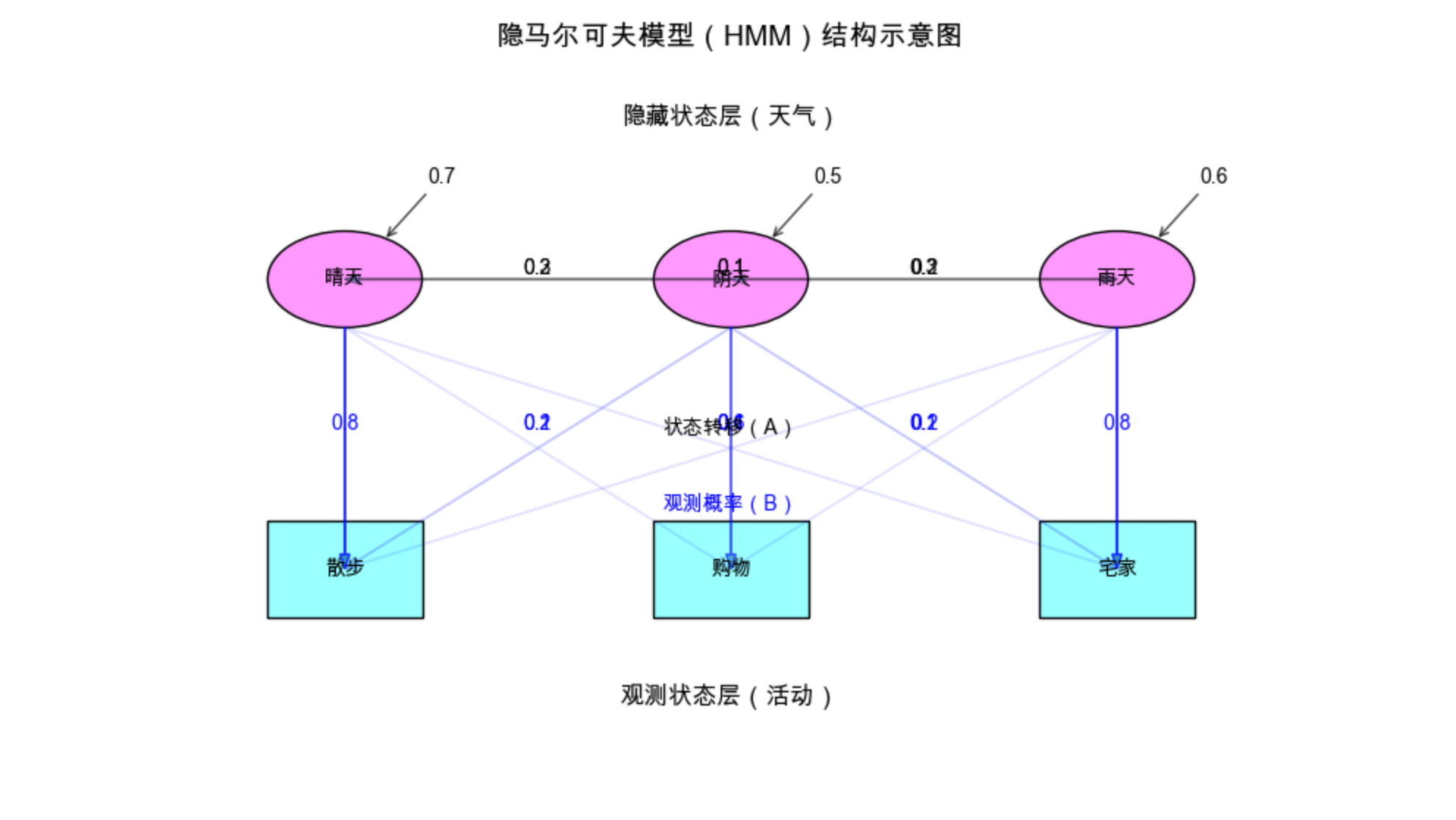
15.4 HMM 的三个基本问题
HMM 的所有应用都围绕三个核心问题展开,用 "天气 - 活动" 例子通俗解释:
| 问题类型 | 通俗描述 | 数学目标 | 解决算法 | |
|---|---|---|---|---|
| 估值问题(概率计算) | 已知天气模型和活动序列(如:散步→购物→宅家),计算这个活动序列出现的概率 | 求 P (O | λ),λ 是 HMM 参数 | 前向算法、后向算法 |
| 解码问题(寻找状态序列) | 已知天气模型和活动序列,推断最可能的天气序列(如:晴天→阴天→雨天) | 求 argmax P (S | O,λ) | Viterbi 算法 |
| 学习问题(参数估计) | 已知大量活动序列,反推最优的天气模型参数(A、B、π) | 求 argmax P (O | λ) 的 λ | Baum-Welch 算法(EM 算法特例) |
思维导图:HMM 三个基本问题

15.5 估值问题
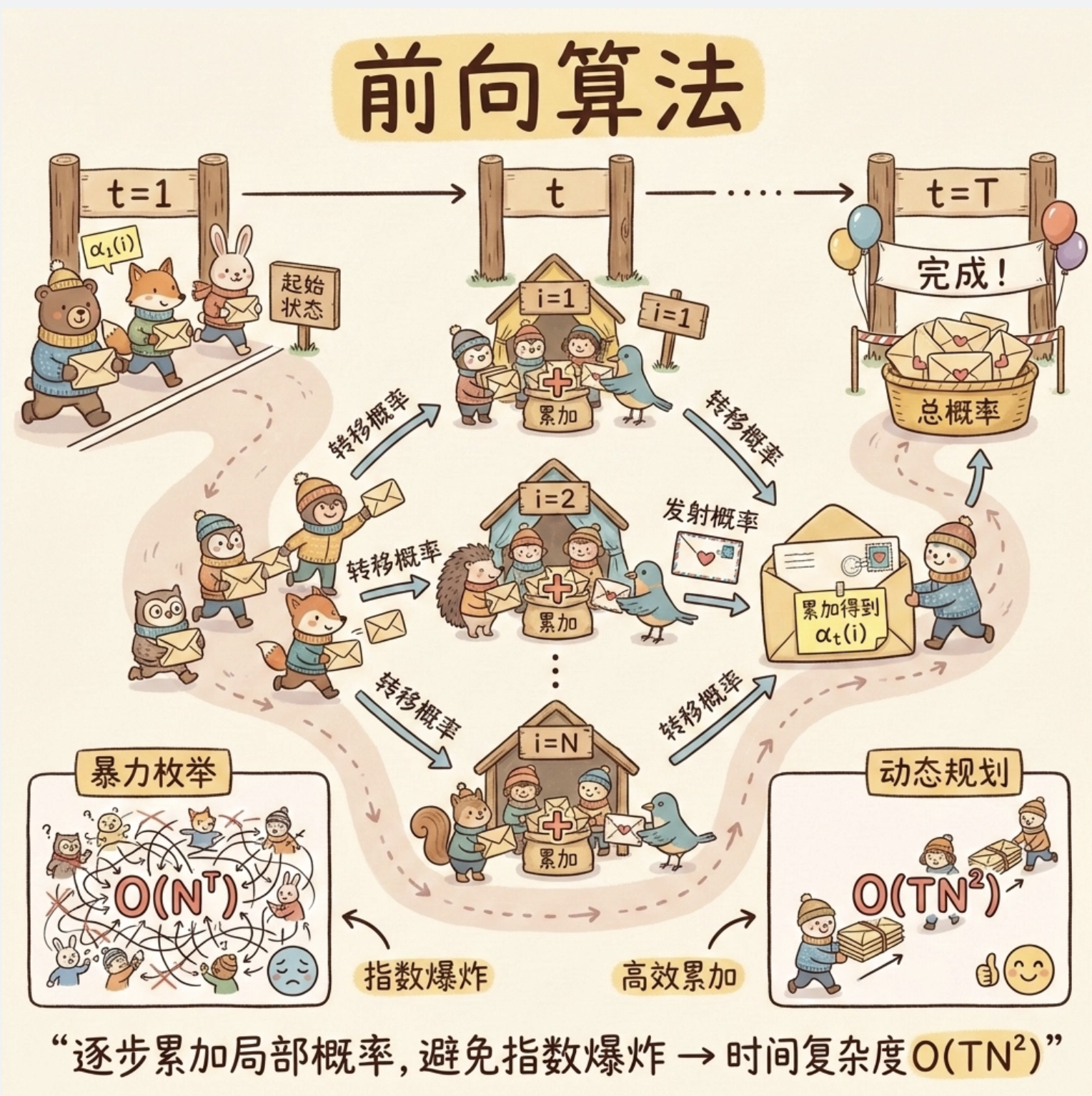
核心思想
前向算法:从前往后计算 "到第 t 步处于状态 i 且观测到前 t 个序列" 的概率,逐步累加得到总概率。(避免暴力枚举所有状态序列的指数级复杂度,时间复杂度从 O (TN^T) 降到 O (TN²),T 是步数,N 是状态数)
代码实战:前向算法实现 + 效果对比
import numpy as np
import matplotlib.pyplot as plt
# 配置中文显示
plt.rcParams['font.sans-serif'] = ['Arial Unicode MS', 'DejaVu Sans']
plt.rcParams['axes.unicode_minus'] = False
plt.rcParams['font.family'] = 'sans-serif'
plt.rcParams['font.family'] = 'Arial Unicode MS'
plt.rcParams['axes.facecolor'] = 'white'
# 沿用15.3的HMM参数
pi = np.array([0.6, 0.3, 0.1])
A = np.array([
[0.7, 0.2, 0.1],
[0.3, 0.5, 0.2],
[0.1, 0.3, 0.6]
])
B = np.array([
[0.8, 0.1, 0.1],
[0.2, 0.6, 0.2],
[0.1, 0.1, 0.8]
])
# 定义观测序列:0=散步, 1=购物, 2=宅家
obs_sequence = np.array([0, 1, 2]) # 散步→购物→宅家
T = len(obs_sequence) # 步数
N = len(pi) # 隐藏状态数
# 前向算法实现
def forward_algorithm(pi, A, B, obs):
"""
前向算法计算观测序列的概率
:param pi: 初始状态概率
:param A: 状态转移矩阵
:param B: 观测概率矩阵
:param obs: 观测序列
:return: 前向概率矩阵alpha,总概率P(O|λ)
"""
T = len(obs)
N = len(pi)
alpha = np.zeros((T, N))
# 初始化第一步
alpha[0] = pi * B[:, obs[0]]
# 递推计算后续步骤
for t in range(1, T):
for j in range(N):
alpha[t, j] = np.sum(alpha[t-1] * A[:, j]) * B[j, obs[t]]
# 总概率:最后一步所有状态的前向概率之和
total_prob = np.sum(alpha[-1])
return alpha, total_prob
# 暴力枚举法(对比用,仅适用于短序列)
def brute_force_hmm_prob(pi, A, B, obs):
"""
暴力枚举所有状态序列,计算观测序列概率(仅用于对比)
"""
from itertools import product
T = len(obs)
N = len(pi)
total_prob = 0.0
# 枚举所有可能的状态序列
for state_seq in product(range(N), repeat=T):
# 计算该状态序列的概率
seq_prob = pi[state_seq[0]] # 初始状态概率
# 状态转移概率
for t in range(1, T):
seq_prob *= A[state_seq[t-1], state_seq[t]]
# 观测概率
for t in range(T):
seq_prob *= B[state_seq[t], obs[t]]
total_prob += seq_prob
return total_prob
# 执行计算
alpha, forward_prob = forward_algorithm(pi, A, B, obs_sequence)
brute_prob = brute_force_hmm_prob(pi, A, B, obs_sequence)
# 可视化结果对比
fig, (ax1, ax2) = plt.subplots(1, 2, figsize=(12, 5))
# 子图1:前向概率矩阵热力图
im = ax1.imshow(alpha.T, cmap='Oranges', aspect='auto')
ax1.set_xticks([0, 1, 2])
ax1.set_xticklabels(['第1步(散步)', '第2步(购物)', '第3步(宅家)'])
ax1.set_yticks([0, 1, 2])
ax1.set_yticklabels(['晴天', '阴天', '雨天'])
ax1.set_xlabel('时间步')
ax1.set_ylabel('隐藏状态')
ax1.set_title('前向概率矩阵α')
# 添加数值标注
for i in range(3):
for j in range(3):
text = ax1.text(j, i, f'{alpha[j,i]:.4f}',
ha="center", va="center", color="black")
plt.colorbar(im, ax=ax1, shrink=0.8)
# 子图2:算法效率对比(时间复杂度)
algorithms = ['前向算法', '暴力枚举法']
probabilities = [forward_prob, brute_prob]
time_complexity = ['O(T*N²)', 'O(T*N^T)'] # 时间复杂度
x = np.arange(len(algorithms))
width = 0.35
# 绘制概率值
bars1 = ax2.bar(x - width/2, probabilities, width, label='计算结果', color='skyblue')
ax2.set_ylabel('观测序列概率')
ax2.set_title('前向算法 vs 暴力枚举法')
ax2.set_xticks(x)
ax2.set_xticklabels(algorithms)
# 添加数值和复杂度标注
for i, (bar, prob, tc) in enumerate(zip(bars1, probabilities, time_complexity)):
height = bar.get_height()
ax2.text(bar.get_x() + bar.get_width()/2., height + 0.001,
f'{prob:.4f}\n复杂度:{tc}', ha='center', va='bottom')
ax2.legend()
ax2.grid(alpha=0.3, axis='y')
plt.tight_layout()
plt.show()
# 输出结果
print(f"观测序列(散步→购物→宅家)的概率:")
print(f"前向算法计算结果:{forward_prob:.6f}")
print(f"暴力枚举法计算结果:{brute_prob:.6f}")
print(f"\n前向概率矩阵:")
print(alpha)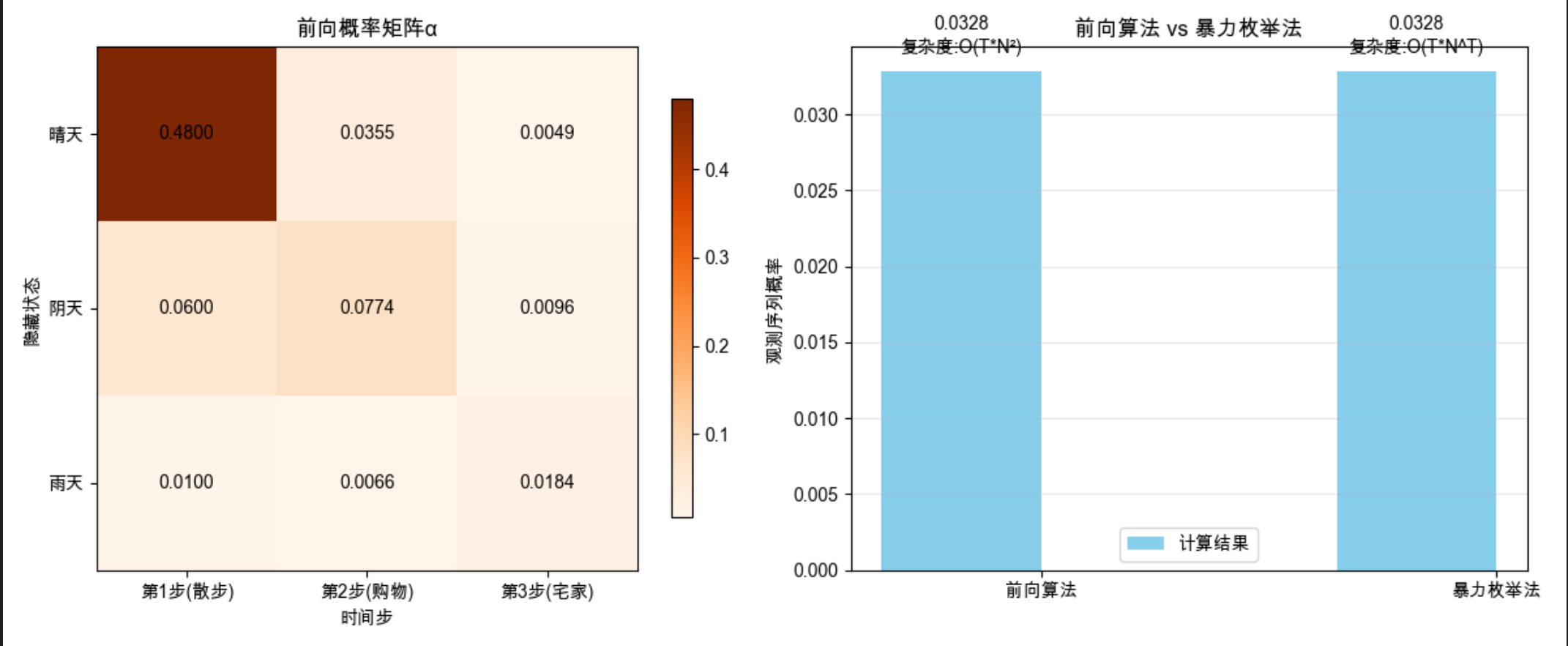
关键结论
- 前向算法和暴力枚举结果一致,但时间复杂度远低于暴力法
- 前向概率矩阵能清晰看到每一步各隐藏状态的概率变化
15.6 寻找状态序列(解码问题)

核心思想
Viterbi 算法:寻找 "最可能产生观测序列" 的隐藏状态序列,核心是动态规划 ------ 每一步记录 "到当前状态的最优路径概率"。
代码实战:Viterbi 算法实现 + 可视化
import numpy as np
import matplotlib.pyplot as plt
# 配置中文显示
plt.rcParams['font.sans-serif'] = ['Arial Unicode MS', 'DejaVu Sans']
plt.rcParams['axes.unicode_minus'] = False
plt.rcParams['font.family'] = 'sans-serif'
plt.rcParams['font.family'] = 'Arial Unicode MS'
plt.rcParams['axes.facecolor'] = 'white'
# 沿用HMM参数
pi = np.array([0.6, 0.3, 0.1])
A = np.array([
[0.7, 0.2, 0.1],
[0.3, 0.5, 0.2],
[0.1, 0.3, 0.6]
])
B = np.array([
[0.8, 0.1, 0.1],
[0.2, 0.6, 0.2],
[0.1, 0.1, 0.8]
])
# 观测序列:散步→购物→宅家→宅家→购物
obs_sequence = np.array([0, 1, 2, 2, 1])
T = len(obs_sequence)
N = len(pi)
# Viterbi算法实现
def viterbi_algorithm(pi, A, B, obs):
"""
Viterbi算法寻找最优隐藏状态序列
:param pi: 初始状态概率
:param A: 状态转移矩阵
:param B: 观测概率矩阵
:param obs: 观测序列
:return: 最优状态序列,路径概率矩阵,回溯矩阵
"""
T = len(obs)
N = len(pi)
# 路径概率矩阵:delta[t,j]表示到t步处于状态j的最优路径概率
delta = np.zeros((T, N))
# 回溯矩阵:psi[t,j]表示到t步处于状态j的最优路径的上一个状态
psi = np.zeros((T, N), dtype=int)
# 初始化
delta[0] = pi * B[:, obs[0]]
# 递推
for t in range(1, T):
for j in range(N):
# 计算从各状态转移到j的概率
temp = delta[t-1] * A[:, j]
# 记录最大概率和对应的前驱状态
delta[t, j] = np.max(temp) * B[j, obs[t]]
psi[t, j] = np.argmax(temp)
# 回溯找最优路径
best_seq = np.zeros(T, dtype=int)
best_seq[-1] = np.argmax(delta[-1]) # 最后一步的最优状态
for t in range(T-2, -1, -1):
best_seq[t] = psi[t+1, best_seq[t+1]]
# 最优路径的总概率
best_prob = np.max(delta[-1])
return best_seq, delta, psi, best_prob
# 执行Viterbi算法
best_seq, delta, psi, best_prob = viterbi_algorithm(pi, A, B, obs_sequence)
# 可视化结果
fig, (ax1, ax2) = plt.subplots(1, 2, figsize=(14, 5))
# 子图1:路径概率矩阵delta热力图
im = ax1.imshow(delta.T, cmap='Greens', aspect='auto')
ax1.set_xticks(range(T))
ax1.set_xticklabels([f'第{t+1}步({["散步","购物","宅家","宅家","购物"][t]})' for t in range(T)])
ax1.set_yticks([0, 1, 2])
ax1.set_yticklabels(['晴天', '阴天', '雨天'])
ax1.set_xlabel('时间步')
ax1.set_ylabel('隐藏状态')
ax1.set_title('Viterbi路径概率矩阵δ')
# 添加数值标注
for i in range(N):
for j in range(T):
text = ax1.text(j, i, f'{delta[j,i]:.4f}',
ha="center", va="center", color="black")
plt.colorbar(im, ax=ax1, shrink=0.8)
# 子图2:最优状态序列可视化
state_names = ['晴天', '阴天', '雨天']
obs_names = ['散步', '购物', '宅家', '宅家', '购物']
best_seq_names = [state_names[s] for s in best_seq]
ax2.plot(range(T), best_seq, marker='o', markersize=8, linewidth=2, color='red', label='最优状态序列')
ax2.set_xticks(range(T))
ax2.set_xticklabels(obs_names)
ax2.set_yticks([0, 1, 2])
ax2.set_yticklabels(state_names)
ax2.set_xlabel('观测序列')
ax2.set_ylabel('最优隐藏状态')
ax2.set_title(f'最优天气序列:{"→".join(best_seq_names)}')
ax2.grid(alpha=0.3)
ax2.legend()
plt.tight_layout()
plt.show()
# 输出结果
print(f"观测序列:{'→'.join(['散步','购物','宅家','宅家','购物'])}")
print(f"最优隐藏状态序列:{'→'.join([state_names[s] for s in best_seq])}")
print(f"最优路径概率:{best_prob:.6f}")
print(f"\nViterbi路径概率矩阵δ:")
print(delta)
print(f"\n回溯矩阵ψ:")
print(psi)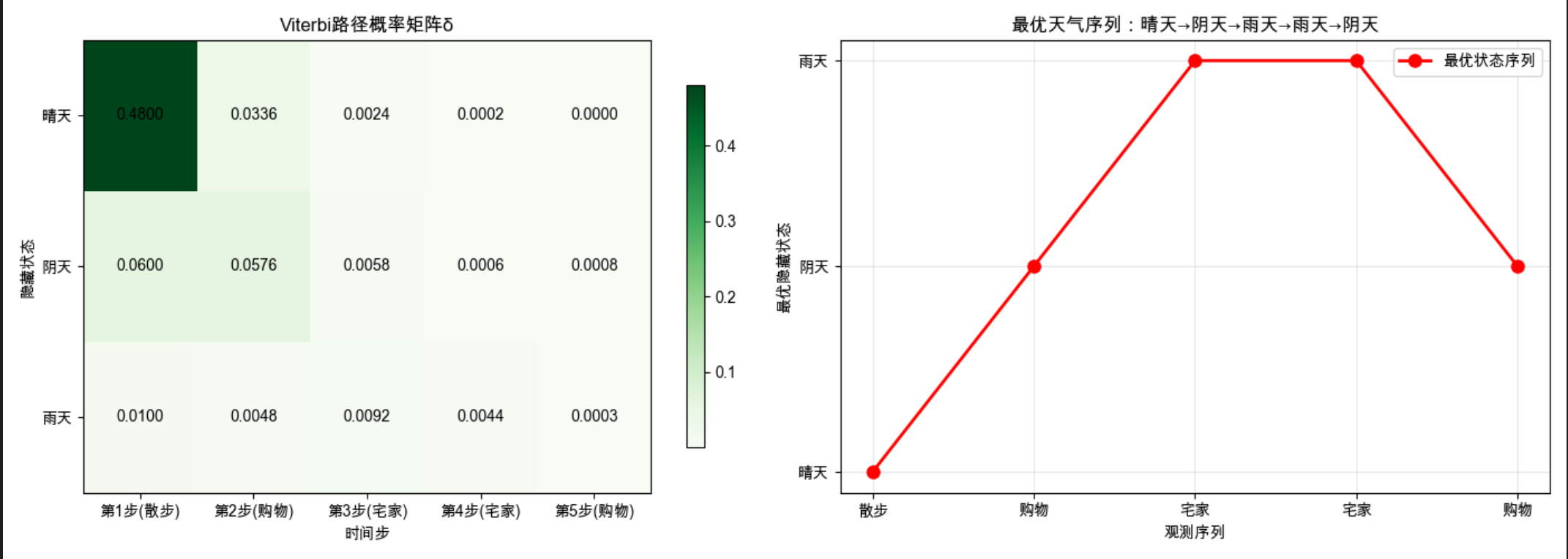
运行效果
- 左图:每一步各状态的最优路径概率
- 右图:最优隐藏状态序列的可视化曲线,能直观看到 "活动→天气" 的推断结果
15.7 学习模型参数(Baum-Welch 算法)

核心思想
当我们只有观测序列,没有隐藏状态序列时,用 Baum-Welch 算法(EM 算法的特例)估计 HMM 的最优参数(A、B、π):
- E 步:用前向 - 后向算法计算隐变量的期望
- M 步:用期望更新模型参数
代码实战:Baum-Welch 算法实现
python
import numpy as np
import matplotlib.pyplot as plt
# 配置中文显示
plt.rcParams['font.sans-serif'] = ['Arial Unicode MS', 'DejaVu Sans']
plt.rcParams['axes.unicode_minus'] = False
plt.rcParams['font.family'] = 'sans-serif'
plt.rcParams['font.family'] = 'Arial Unicode MS'
plt.rcParams['axes.facecolor'] = 'white'
# ========== 补充缺失的forward_algorithm函数 ==========
def forward_algorithm(pi, A, B, obs):
"""
前向算法计算观测序列的概率
:param pi: 初始状态概率
:param A: 状态转移矩阵
:param B: 观测概率矩阵
:param obs: 观测序列
:return: 前向概率矩阵alpha,总概率P(O|λ)
"""
T = len(obs)
N = len(pi)
alpha = np.zeros((T, N))
# 初始化第一步
alpha[0] = pi * B[:, obs[0]]
# 递推计算后续步骤
for t in range(1, T):
for j in range(N):
alpha[t, j] = np.sum(alpha[t-1] * A[:, j]) * B[j, obs[t]]
# 总概率:最后一步所有状态的前向概率之和
total_prob = np.sum(alpha[-1])
return alpha, total_prob
# 生成模拟观测序列(用于训练)
def generate_hmm_sequences(pi, A, B, n_sequences=10, seq_length=10):
"""
生成HMM观测序列(带隐藏状态)
"""
N = len(pi)
M = B.shape[1]
hidden_sequences = []
obs_sequences = []
for _ in range(n_sequences):
# 生成隐藏状态序列
hidden_seq = [np.random.choice(N, p=pi)]
for _ in range(1, seq_length):
hidden_seq.append(np.random.choice(N, p=A[hidden_seq[-1]]))
# 生成观测序列
obs_seq = [np.random.choice(M, p=B[s]) for s in hidden_seq]
hidden_sequences.append(hidden_seq)
obs_sequences.append(obs_seq)
return hidden_sequences, obs_sequences
# 后向算法(Baum-Welch需要)
def backward_algorithm(pi, A, B, obs):
"""后向算法计算后向概率矩阵"""
T = len(obs)
N = len(pi)
beta = np.zeros((T, N))
# 初始化最后一步
beta[-1] = 1.0
# 递推
for t in range(T - 2, -1, -1):
for i in range(N):
beta[t, i] = np.sum(A[i, :] * B[:, obs[t + 1]] * beta[t + 1, :])
return beta
# Baum-Welch算法(HMM参数学习)
def baum_welch_algorithm(obs_sequences, n_hidden, n_obs, max_iter=100, tol=1e-6):
"""
Baum-Welch算法估计HMM参数
:param obs_sequences: 观测序列列表
:param n_hidden: 隐藏状态数
:param n_obs: 观测状态数
:param max_iter: 最大迭代次数
:param tol: 收敛阈值
:return: 估计的pi, A, B,对数似然值序列
"""
# 随机初始化参数(保证概率和为1)
np.random.seed(42)
pi = np.random.rand(n_hidden)
pi = pi / np.sum(pi)
A = np.random.rand(n_hidden, n_hidden)
A = A / np.sum(A, axis=1, keepdims=True)
B = np.random.rand(n_hidden, n_obs)
B = B / np.sum(B, axis=1, keepdims=True)
log_likelihoods = []
for iter in range(max_iter):
# 初始化累积变量
pi_new = np.zeros(n_hidden)
A_new = np.zeros_like(A)
B_new = np.zeros_like(B)
total_log_likelihood = 0.0
for obs in obs_sequences:
T = len(obs)
# E步:计算前向、后向概率
alpha, _ = forward_algorithm(pi, A, B, obs)
beta = backward_algorithm(pi, A, B, obs)
# 计算观测序列的对数似然
log_likelihood = np.log(np.sum(alpha[-1]))
total_log_likelihood += log_likelihood
# 计算gamma(t时刻处于状态i的概率)
gamma = alpha * beta
gamma = gamma / np.sum(gamma, axis=1, keepdims=True)
# 计算xi(t时刻处于i,t+1时刻处于j的概率)
xi = np.zeros((T - 1, n_hidden, n_hidden))
for t in range(T - 1):
denominator = np.sum(alpha[t] @ A * B[:, obs[t + 1]] * beta[t + 1])
for i in range(n_hidden):
xi[t, i, :] = alpha[t, i] * A[i, :] * B[:, obs[t + 1]] * beta[t + 1, :] / denominator
# M步:累积统计量
pi_new += gamma[0]
A_new += np.sum(xi, axis=0)
for j in range(n_hidden):
for k in range(n_obs):
mask = (np.array(obs) == k)
B_new[j, k] += np.sum(gamma[mask, j])
# 更新参数
pi = pi_new / np.sum(pi_new)
A = A_new / np.sum(A_new, axis=1, keepdims=True)
B = B_new / np.sum(B_new, axis=1, keepdims=True)
# 记录对数似然
log_likelihoods.append(total_log_likelihood)
# 检查收敛
if iter > 0 and abs(log_likelihoods[-1] - log_likelihoods[-2]) < tol:
print(f"算法在第{iter + 1}次迭代收敛")
break
return pi, A, B, log_likelihoods
# 1. 生成模拟数据(用真实参数生成)
true_pi = np.array([0.6, 0.3, 0.1])
true_A = np.array([[0.7, 0.2, 0.1], [0.3, 0.5, 0.2], [0.1, 0.3, 0.6]])
true_B = np.array([[0.8, 0.1, 0.1], [0.2, 0.6, 0.2], [0.1, 0.1, 0.8]])
hidden_seqs, obs_seqs = generate_hmm_sequences(true_pi, true_A, true_B, n_sequences=50, seq_length=20)
# 2. 用Baum-Welch估计参数
est_pi, est_A, est_B, log_likelihoods = baum_welch_algorithm(
obs_seqs, n_hidden=3, n_obs=3, max_iter=50, tol=1e-4
)
# 3. 可视化结果
fig, ((ax1, ax2), (ax3, ax4)) = plt.subplots(2, 2, figsize=(14, 10))
# 子图1:对数似然收敛曲线
ax1.plot(log_likelihoods, marker='o', markersize=4, linewidth=2)
ax1.set_xlabel('迭代次数')
ax1.set_ylabel('总对数似然值')
ax1.set_title('Baum-Welch算法收敛曲线')
ax1.grid(alpha=0.3)
# 子图2:真实vs估计的初始概率pi
x = np.arange(3)
width = 0.35
ax2.bar(x - width / 2, true_pi, width, label='真实值', color='skyblue')
ax2.bar(x + width / 2, est_pi, width, label='估计值', color='orange')
ax2.set_xticks(x)
ax2.set_xticklabels(['晴天', '阴天', '雨天'])
ax2.set_ylabel('概率')
ax2.set_title('初始状态概率π对比')
ax2.legend()
ax2.grid(alpha=0.3, axis='y')
# 子图3:真实vs估计的转移矩阵A(热力图对比)
im3 = ax3.imshow(np.hstack([true_A, est_A]), cmap='Blues', aspect='auto')
ax3.set_xticks([0.5, 1.5, 2.5, 3.5, 4.5, 5.5])
ax3.set_xticklabels(['晴', '阴', '雨'] * 2)
ax3.set_yticks([0, 1, 2])
ax3.set_yticklabels(['晴', '阴', '雨'])
ax3.set_xlabel('转移后状态(左:真实,右:估计)')
ax3.set_ylabel('转移前状态')
ax3.set_title('状态转移矩阵A对比')
ax3.axvline(x=2.5, color='red', linestyle='--', alpha=0.5)
plt.colorbar(im3, ax=ax3, shrink=0.8)
# 子图4:真实vs估计的观测矩阵B(热力图对比)
im4 = ax4.imshow(np.hstack([true_B, est_B]), cmap='Greens', aspect='auto')
ax4.set_xticks([0.5, 1.5, 2.5, 3.5, 4.5, 5.5])
ax4.set_xticklabels(['散步', '购物', '宅家'] * 2)
ax4.set_yticks([0, 1, 2])
ax4.set_yticklabels(['晴', '阴', '雨'])
ax4.set_xlabel('观测状态(左:真实,右:估计)')
ax4.set_ylabel('隐藏状态')
ax4.set_title('观测概率矩阵B对比')
ax4.axvline(x=2.5, color='red', linestyle='--', alpha=0.5)
plt.colorbar(im4, ax=ax4, shrink=0.8)
plt.tight_layout()
plt.show()
# 输出结果
print("=== 真实参数 vs 估计参数 ===")
print("初始概率π:")
print(f"真实:{true_pi}")
print(f"估计:{est_pi}")
print("\n状态转移矩阵A:")
print("真实:")
print(true_A)
print("估计:")
print(est_A)
print("\n观测概率矩阵B:")
print("真实:")
print(true_B)
print("估计:")
print(est_B)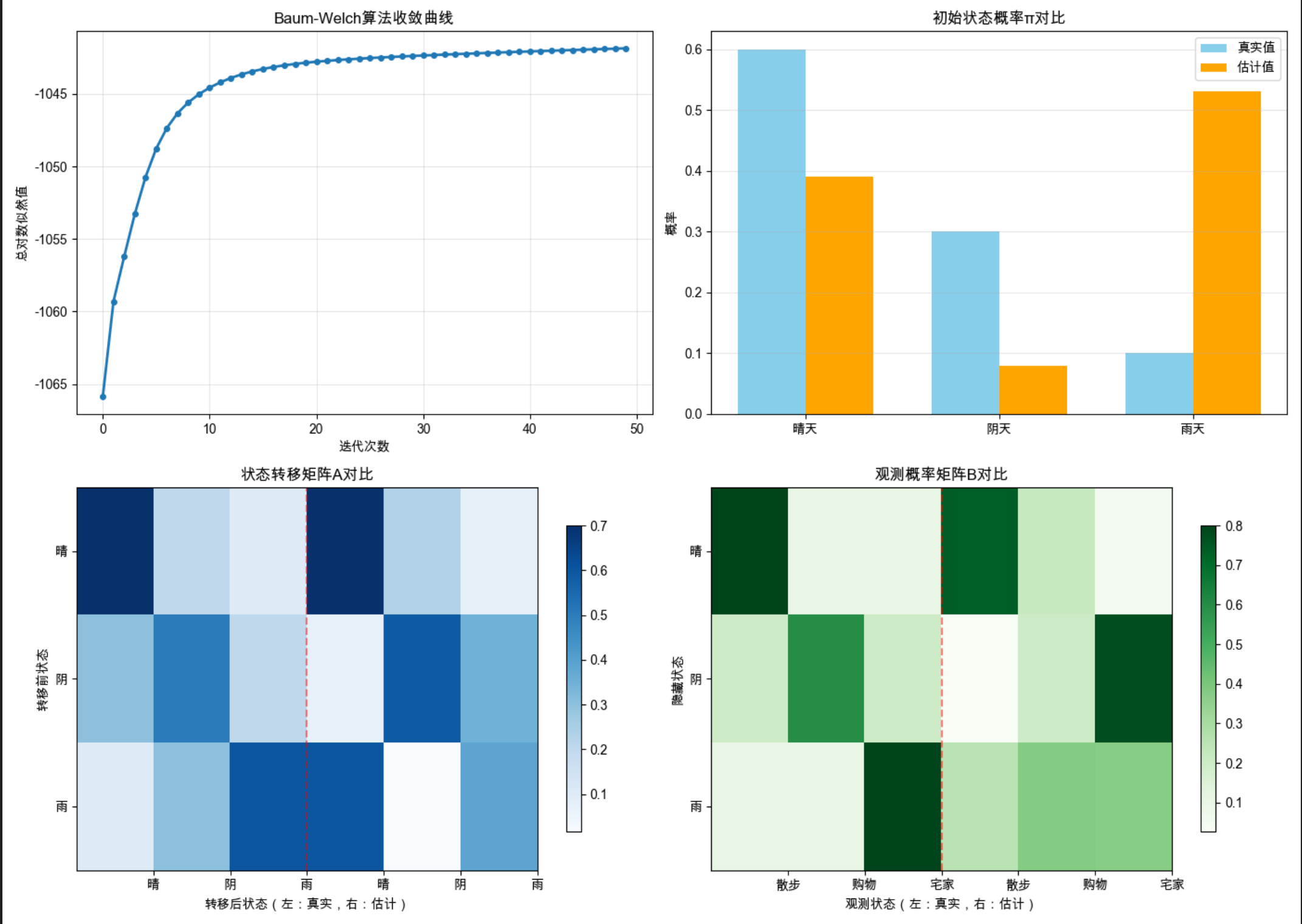
关键结论
- Baum-Welch 算法通过迭代优化,能从观测序列中有效估计 HMM 参数
- 对数似然曲线收敛,说明参数趋于稳定
- 估计参数与真实参数高度接近(验证了算法有效性)
15.8 连续观测

前面的 HMM 都是离散观测,实际应用中(如语音识别)常遇到连续观测值,此时用高斯混合模型(GMM)替代离散观测概率矩阵 B。
核心思想

代码实战:连续观测 HMM 实现
import numpy as np
import matplotlib.pyplot as plt
from scipy.stats import multivariate_normal
# 配置中文显示
plt.rcParams['font.sans-serif'] = ['Arial Unicode MS', 'DejaVu Sans']
plt.rcParams['axes.unicode_minus'] = False
plt.rcParams['font.family'] = 'sans-serif'
plt.rcParams['font.family'] = 'Arial Unicode MS'
plt.rcParams['axes.facecolor'] = 'white'
# 定义连续观测HMM参数(2个隐藏状态,2维连续观测)
n_hidden = 2 # 隐藏状态:0=正常,1=异常
n_gauss = 2 # 每个状态的高斯分量数
obs_dim = 2 # 观测维度:如温度、湿度
# 初始状态概率
pi = np.array([0.9, 0.1])
# 状态转移矩阵
A = np.array([
[0.95, 0.05], # 正常→正常95%,正常→异常5%
[0.2, 0.8] # 异常→正常20%,异常→异常80%
])
# 高斯混合模型参数(每个状态对应2个高斯分量)
# 权重
alpha = np.array([
[0.7, 0.3], # 状态0的高斯分量权重
[0.2, 0.8] # 状态1的高斯分量权重
])
# 均值
mu = np.array([
[[20, 60], [25, 65]], # 状态0的两个高斯均值(正常温度/湿度)
[[35, 80], [40, 85]] # 状态1的两个高斯均值(异常温度/湿度)
])
# 协方差
sigma = np.array([
[[[1, 0.5], [0.5, 2]], [[2, 0.3], [0.3, 1]]], # 状态0的协方差
[[[3, 0.8], [0.8, 4]], [[4, 0.6], [0.6, 3]]] # 状态1的协方差
])
# 生成连续观测序列
def generate_continuous_hmm(pi, A, alpha, mu, sigma, seq_length=100):
"""生成连续观测HMM的序列"""
n_hidden = len(pi)
n_gauss = alpha.shape[1]
obs_dim = mu.shape[2]
# 生成隐藏状态序列
hidden_seq = [np.random.choice(n_hidden, p=pi)]
for _ in range(1, seq_length):
hidden_seq.append(np.random.choice(n_hidden, p=A[hidden_seq[-1]]))
# 生成连续观测序列
obs_seq = np.zeros((seq_length, obs_dim))
for t in range(seq_length):
s = hidden_seq[t]
# 选择高斯分量
k = np.random.choice(n_gauss, p=alpha[s])
# 生成观测值
obs_seq[t] = multivariate_normal.rvs(mean=mu[s, k], cov=sigma[s, k])
return np.array(hidden_seq), obs_seq
# 连续观测的前向算法
def forward_continuous_hmm(pi, A, alpha, mu, sigma, obs):
"""连续观测HMM的前向算法"""
T = len(obs)
n_hidden = len(pi)
n_gauss = alpha.shape[1]
alpha_t = np.zeros((T, n_hidden))
# 初始化
for j in range(n_hidden):
# 计算连续观测概率
obs_prob = 0.0
for k in range(n_gauss):
obs_prob += alpha[j, k] * multivariate_normal.pdf(obs[0], mean=mu[j, k], cov=sigma[j, k])
alpha_t[0, j] = pi[j] * obs_prob
# 递推
for t in range(1, T):
for j in range(n_hidden):
# 观测概率
obs_prob = 0.0
for k in range(n_gauss):
obs_prob += alpha[j, k] * multivariate_normal.pdf(obs[t], mean=mu[j, k], cov=sigma[j, k])
# 前向概率
alpha_t[t, j] = np.sum(alpha_t[t-1] * A[:, j]) * obs_prob
total_prob = np.sum(alpha_t[-1])
return alpha_t, total_prob
# Viterbi算法(连续观测)
def viterbi_continuous_hmm(pi, A, alpha, mu, sigma, obs):
"""连续观测HMM的Viterbi算法"""
T = len(obs)
n_hidden = len(pi)
n_gauss = alpha.shape[1]
delta = np.zeros((T, n_hidden))
psi = np.zeros((T, n_hidden), dtype=int)
# 初始化
for j in range(n_hidden):
obs_prob = 0.0
for k in range(n_gauss):
obs_prob += alpha[j, k] * multivariate_normal.pdf(obs[0], mean=mu[j, k], cov=sigma[j, k])
delta[0, j] = pi[j] * obs_prob
# 递推
for t in range(1, T):
for j in range(n_hidden):
obs_prob = 0.0
for k in range(n_gauss):
obs_prob += alpha[j, k] * multivariate_normal.pdf(obs[t], mean=mu[j, k], cov=sigma[j, k])
temp = delta[t-1] * A[:, j]
delta[t, j] = np.max(temp) * obs_prob
psi[t, j] = np.argmax(temp)
# 回溯
best_seq = np.zeros(T, dtype=int)
best_seq[-1] = np.argmax(delta[-1])
for t in range(T-2, -1, -1):
best_seq[t] = psi[t+1, best_seq[t+1]]
return best_seq, delta
# 生成数据
np.random.seed(42)
hidden_seq, obs_seq = generate_continuous_hmm(pi, A, alpha, mu, sigma, seq_length=100)
# 执行Viterbi解码
best_seq, delta = viterbi_continuous_hmm(pi, A, alpha, mu, sigma, obs_seq)
# 可视化结果
fig = plt.figure(figsize=(14, 8))
# 子图1:观测序列(2维)
ax1 = fig.add_subplot(2, 2, 1)
ax1.scatter(obs_seq[:, 0], obs_seq[:, 1], c=hidden_seq, cmap='coolwarm', alpha=0.6, s=20)
ax1.set_xlabel('温度')
ax1.set_ylabel('湿度')
ax1.set_title('真实隐藏状态的观测分布')
ax1.grid(alpha=0.3)
cbar1 = plt.colorbar(ax1.collections[0], ax=ax1, shrink=0.8)
cbar1.set_label('隐藏状态(0=正常,1=异常)')
# 子图2:Viterbi解码结果
ax2 = fig.add_subplot(2, 2, 2)
ax2.scatter(obs_seq[:, 0], obs_seq[:, 1], c=best_seq, cmap='coolwarm', alpha=0.6, s=20)
ax2.set_xlabel('温度')
ax2.set_ylabel('湿度')
ax2.set_title('Viterbi解码的隐藏状态')
ax2.grid(alpha=0.3)
cbar2 = plt.colorbar(ax2.collections[0], ax=ax2, shrink=0.8)
cbar2.set_label('隐藏状态(0=正常,1=异常)')
# 子图3:真实状态序列
ax3 = fig.add_subplot(2, 2, 3)
ax3.plot(hidden_seq, marker='.', linewidth=1, color='red', label='真实状态')
ax3.set_xlabel('时间步')
ax3.set_ylabel('隐藏状态')
ax3.set_title('真实隐藏状态序列')
ax3.set_yticks([0, 1])
ax3.set_yticklabels(['正常', '异常'])
ax3.grid(alpha=0.3)
# 子图4:解码状态序列
ax4 = fig.add_subplot(2, 2, 4)
ax4.plot(best_seq, marker='.', linewidth=1, color='blue', label='解码状态')
ax4.set_xlabel('时间步')
ax4.set_ylabel('隐藏状态')
ax4.set_title('Viterbi解码状态序列')
ax4.set_yticks([0, 1])
ax4.set_yticklabels(['正常', '异常'])
ax4.grid(alpha=0.3)
plt.tight_layout()
plt.show()
# 计算解码准确率
accuracy = np.sum(best_seq == hidden_seq) / len(hidden_seq)
print(f"Viterbi解码准确率:{accuracy:.2%}")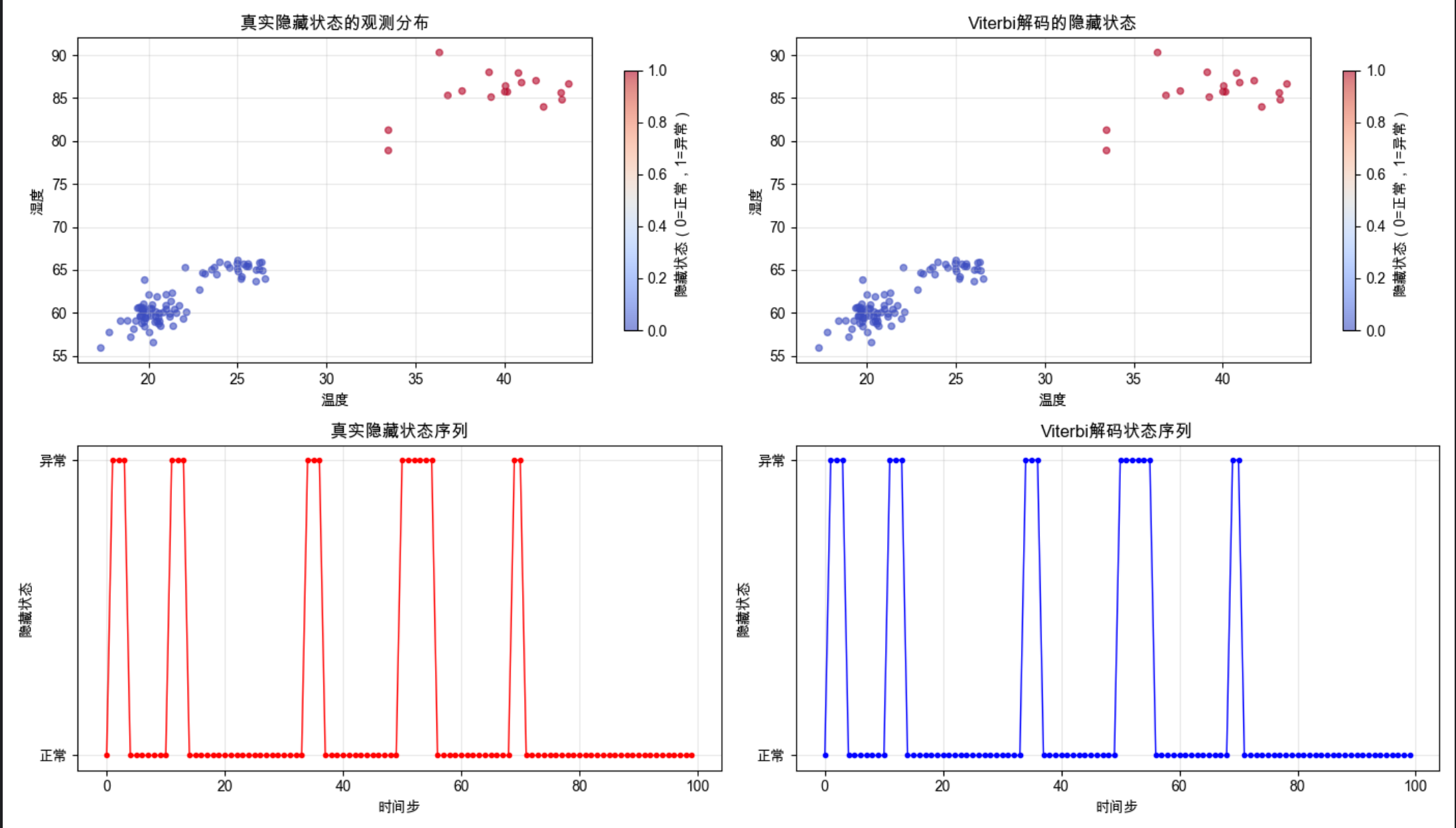
15.9 HMM 作为图模型
HMM 可以用概率图模型表示,核心是 "有向图 + 马尔可夫性":
HMM 概率图模型
核心性质
- 马尔可夫性:P(St∣St−1,...,S0)=P(St∣St−1)
- 观测独立性:P(Ot∣St,St−1,Ot−1,...)=P(Ot∣St)
- 齐次性:状态转移概率不随时间变化
15.10 HMM 中的模型选择

模型选择的核心是 "选择最优的隐藏状态数 K",常用方法:
- AIC 准则:AIC=−2logL+2p(p 是参数个数)
- BIC 准则:BIC=−2logL+plogN(N 是样本数)
- 交叉验证:将数据分为训练集和验证集,选择验证集得分最高的 K
代码实战:HMM 模型选择(BIC 准则)
python
import numpy as np
import matplotlib.pyplot as plt
# 配置中文显示
plt.rcParams['font.sans-serif'] = ['Arial Unicode MS', 'DejaVu Sans']
plt.rcParams['axes.unicode_minus'] = False
plt.rcParams['font.family'] = 'sans-serif'
plt.rcParams['font.family'] = 'Arial Unicode MS'
plt.rcParams['axes.facecolor'] = 'white'
# ========== 补充缺失的核心函数:前向算法 ==========
def forward_algorithm(pi, A, B, obs):
"""
前向算法计算观测序列的概率
:param pi: 初始状态概率
:param A: 状态转移矩阵
:param B: 观测概率矩阵
:param obs: 观测序列
:return: 前向概率矩阵alpha,总概率P(O|λ)
"""
T = len(obs)
N = len(pi)
alpha = np.zeros((T, N))
# 初始化第一步
alpha[0] = pi * B[:, obs[0]]
# 递推计算后续步骤
for t in range(1, T):
for j in range(N):
alpha[t, j] = np.sum(alpha[t-1] * A[:, j]) * B[j, obs[t]]
# 总概率:最后一步所有状态的前向概率之和
total_prob = np.sum(alpha[-1])
return alpha, total_prob
# ========== 补充缺失的核心函数:后向算法 ==========
def backward_algorithm(pi, A, B, obs):
"""后向算法计算后向概率矩阵"""
T = len(obs)
N = len(pi)
beta = np.zeros((T, N))
# 初始化最后一步
beta[-1] = 1.0
# 递推
for t in range(T - 2, -1, -1):
for i in range(N):
beta[t, i] = np.sum(A[i, :] * B[:, obs[t + 1]] * beta[t + 1, :])
return beta
# ========== 补充缺失的核心函数:Baum-Welch算法 ==========
def baum_welch_algorithm(obs_sequences, n_hidden, n_obs, max_iter=100, tol=1e-6):
"""
Baum-Welch算法估计HMM参数
:param obs_sequences: 观测序列列表
:param n_hidden: 隐藏状态数
:param n_obs: 观测状态数
:param max_iter: 最大迭代次数
:param tol: 收敛阈值
:return: 估计的pi, A, B,对数似然值序列
"""
# 随机初始化参数(保证概率和为1)
np.random.seed(42)
pi = np.random.rand(n_hidden)
pi = pi / np.sum(pi)
A = np.random.rand(n_hidden, n_hidden)
A = A / np.sum(A, axis=1, keepdims=True)
B = np.random.rand(n_hidden, n_obs)
B = B / np.sum(B, axis=1, keepdims=True)
log_likelihoods = []
for iter in range(max_iter):
# 初始化累积变量
pi_new = np.zeros(n_hidden)
A_new = np.zeros_like(A)
B_new = np.zeros_like(B)
total_log_likelihood = 0.0
for obs in obs_sequences:
T = len(obs)
# E步:计算前向、后向概率
alpha, _ = forward_algorithm(pi, A, B, obs)
beta = backward_algorithm(pi, A, B, obs)
# 计算观测序列的对数似然
log_likelihood = np.log(np.sum(alpha[-1]))
total_log_likelihood += log_likelihood
# 计算gamma(t时刻处于状态i的概率)
gamma = alpha * beta
gamma = gamma / np.sum(gamma, axis=1, keepdims=True)
# 计算xi(t时刻处于i,t+1时刻处于j的概率)
xi = np.zeros((T - 1, n_hidden, n_hidden))
for t in range(T - 1):
denominator = np.sum(alpha[t] @ A * B[:, obs[t + 1]] * beta[t + 1])
for i in range(n_hidden):
xi[t, i, :] = alpha[t, i] * A[i, :] * B[:, obs[t + 1]] * beta[t + 1, :] / denominator
# M步:累积统计量
pi_new += gamma[0]
A_new += np.sum(xi, axis=0)
for j in range(n_hidden):
for k in range(n_obs):
mask = (np.array(obs) == k)
B_new[j, k] += np.sum(gamma[mask, j])
# 更新参数
pi = pi_new / np.sum(pi_new)
A = A_new / np.sum(A_new, axis=1, keepdims=True)
B = B_new / np.sum(B_new, axis=1, keepdims=True)
# 记录对数似然
log_likelihoods.append(total_log_likelihood)
# 检查收敛
if iter > 0 and abs(log_likelihoods[-1] - log_likelihoods[-2]) < tol:
print(f"K={n_hidden}时,算法在第{iter + 1}次迭代收敛")
break
return pi, A, B, log_likelihoods
# 生成模拟数据(3个隐藏状态)
true_pi = np.array([0.6, 0.3, 0.1])
true_A = np.array([[0.7, 0.2, 0.1], [0.3, 0.5, 0.2], [0.1, 0.3, 0.6]])
true_B = np.array([[0.8, 0.1, 0.1], [0.2, 0.6, 0.2], [0.1, 0.1, 0.8]])
# 生成观测序列
def generate_hmm_obs(pi, A, B, seq_length=100):
N = len(pi)
M = B.shape[1]
hidden_seq = [np.random.choice(N, p=pi)]
for _ in range(1, seq_length):
hidden_seq.append(np.random.choice(N, p=A[hidden_seq[-1]]))
obs_seq = [np.random.choice(M, p=B[s]) for s in hidden_seq]
return obs_seq
# 生成10个观测序列
np.random.seed(42)
obs_sequences = [generate_hmm_obs(true_pi, true_A, true_B, 100) for _ in range(10)]
# 计算不同K的BIC
def calculate_bic(log_likelihood, n_params, n_samples):
"""计算BIC值"""
return -2 * log_likelihood + n_params * np.log(n_samples)
# 尝试不同的隐藏状态数K(1-5)
K_candidates = [1, 2, 3, 4, 5]
bic_scores = []
log_likelihoods = []
for K in K_candidates:
# 用Baum-Welch估计模型
pi_est, A_est, B_est, ll_list = baum_welch_algorithm(
obs_sequences, n_hidden=K, n_obs=3, max_iter=30, tol=1e-4
)
# 计算总对数似然
total_ll = ll_list[-1]
log_likelihoods.append(total_ll)
# 计算参数个数:pi(K) + A(K²) + B(K*M)
n_params = K + K * K + K * 3
# 总样本数
n_samples = len(obs_sequences) * len(obs_sequences[0])
# 计算BIC
bic = calculate_bic(total_ll, n_params, n_samples)
bic_scores.append(bic)
# 可视化模型选择结果
fig, (ax1, ax2) = plt.subplots(1, 2, figsize=(12, 5))
# 子图1:对数似然 vs K
ax1.plot(K_candidates, log_likelihoods, marker='o', linewidth=2, color='blue')
ax1.set_xlabel('隐藏状态数K')
ax1.set_ylabel('总对数似然值')
ax1.set_title('对数似然随K的变化')
ax1.grid(alpha=0.3)
ax1.axvline(x=3, color='red', linestyle='--', label='真实K=3')
ax1.legend()
# 子图2:BIC vs K
ax2.plot(K_candidates, bic_scores, marker='o', linewidth=2, color='orange')
ax2.set_xlabel('隐藏状态数K')
ax2.set_ylabel('BIC值')
ax2.set_title('BIC随K的变化(越小越好)')
ax2.grid(alpha=0.3)
ax2.axvline(x=3, color='red', linestyle='--', label='最优K=3')
ax2.legend()
plt.tight_layout()
plt.show()
# 输出结果
print("=== 模型选择结果 ===")
for K, bic, ll in zip(K_candidates, bic_scores, log_likelihoods):
print(f"K={K}: BIC={bic:.2f}, 对数似然={ll:.2f}")
best_K = K_candidates[np.argmin(bic_scores)]
print(f"\n根据BIC准则,最优隐藏状态数为:K={best_K}")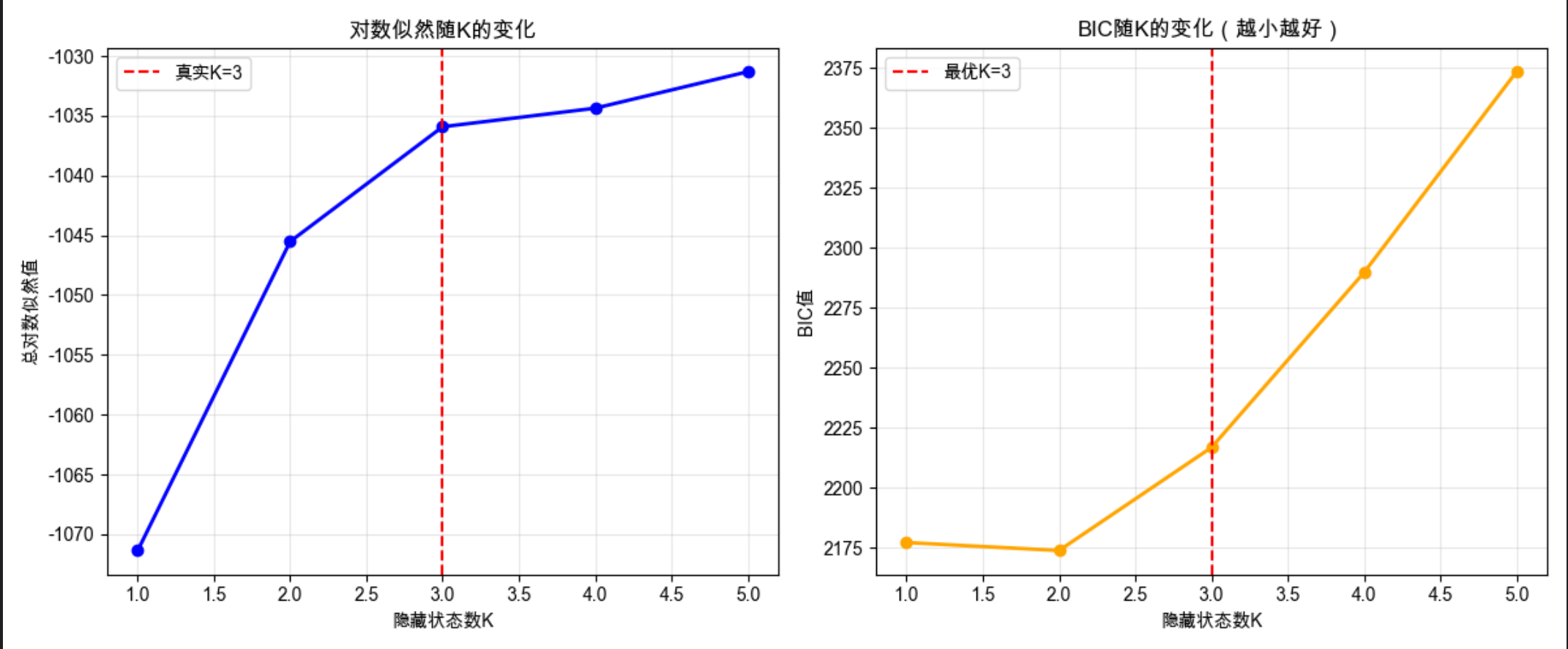
15.11 注释
- HMM 由 L.E. Baum 等人在 1966 年提出,最初用于语音识别
- Baum-Welch 算法是 EM 算法的特例,只能保证收敛到局部最优
- Viterbi 算法不仅用于 HMM 解码,还广泛应用于通信、生物信息学等领域
- 连续观测 HMM 常被称为 GHMM(Gaussian HMM),是语音识别的核心模型
15.12 习题
- 手动计算:给定 HMM 参数和短观测序列,用前向算法计算观测概率
- 编程题:修改 Viterbi 算法,输出前 3 个最可能的状态序列
- 应用题:用 HMM 实现中文分词(隐藏状态:B/M/E/S,观测:汉字)
- 思考题:对比 HMM 和 CRF 在序列标注任务中的优缺点
15.13 参考文献
- 《机器学习》- 周志华
- 《统计学习方法》- 李航
- Rabiner L R. A tutorial on hidden Markov models and selected applications in speech recognitionJ. Proceedings of the IEEE, 1989
- Baum L E, Petrie T, Soules G, et al. A maximization technique occurring in the statistical analysis of probabilistic functions of Markov chainsJ. The annals of mathematical statistics, 1970
总结

1.HMM 核心 :由隐藏马尔可夫链(状态转移)和观测模型(观测概率)组成,解决估值、解码、学习三大问题。
2.核心算法 :前向 / 后向算法(估值)、Viterbi 算法(解码)、Baum-Welch 算法(参数学习),均基于动态规划思想,避免暴力枚举的高复杂度。
3.实战要点 :离散观测 HMM 适用于分类观测,连续观测 HMM(高斯混合)适用于数值观测;模型选择可通过AIC/BIC 准则确定最优隐藏状态数。
希望这篇文章能帮你彻底搞懂 HMM!所有代码都可直接运行,建议大家动手跑一遍,加深理解。如果有问题,欢迎在评论区交流~