当然,读文有感,也算是摘抄一部分,随着慢慢的学习的过程,发现数学真的是一辈子的学科,大学时期真是肤浅了。
避免看不懂,附上原文,文章写的真的挺好,建议都去读读原文。
https://mp.weixin.qq.com/s/MrLlyrdBvDBWyu7LZCHw5Q
其实下面呢,我觉得是极限作为一种新的工具被引入后,我们要定义在上面的很多运算,加减乘除,比较大小,这些都要满足数域上面的封闭,就是说,现在的这套理论不能把之前的数学框架给打破。
极限的引入应该是为了使微积分更有说服力
性质
在哲学/逻辑学上指事物的本质属性,即一事物区别于其他事物的根本特征。在数学上面指图形、函数或数字所具备的特定规律;如"等式的性质"或"三角形的性质"。
也就是说,如果是这个东西,肯定有这个规律。
都上升哲学了,没啥好说的。。。
微分中值定理:函数值与导数之间的核心纽带
微分中值定理体系是连接函数整体变化与局部变化(导数)之间的桥梁 ,在数学分析中占据基础而核心的地位。它不仅奠定了导数几何意义的严格基础,而且是研究函数单调性、极值、凹凸性以及极限理论的重要工具;我觉得更加有趣的一点是,可以从局部变化就能知道整体的变化,这非常de 有用。
罗尔定理(Rolle's Theorem)
设函数 f(x)f(x)f(x) 满足:
在闭区间 a,ba,ba,b 上连续;在开区间 (a,b)(a,b)(a,b) 内可导;且端点函数值相等:f(a)=f(b)f(a)=f(b)f(a)=f(b)。
则至少存在一点 ξ∈(a,b)\xi \in (a,b)ξ∈(a,b),使得
f′(ξ)=0. f'(\xi)=0. f′(ξ)=0.
在满足端点高度相同的条件下,曲线在区间内部必然存在一条水平切线 ;罗尔定理是整个中值定理体系的基础定理,其余中值定理均可视为它的推广。
只要满足 "连续、光滑、两端等高" 这三个条件,曲线中间必然至少有一个"平"的点。罗尔定理告诉我们:在一个连续光滑的世界里,想要从一个状态回到最初的状态,你必须经历一个"平稳"的瞬间。 无论你是先上升还是先下降,为了回到原点,你必然要在某一刻停下上升或下降的势头。
状态的一种转换
拉格朗日中值定理(Lagrange Mean Value Theorem)
若函数 f(x)f(x)f(x) 在 a,ba,ba,b 上连续,在 (a,b)(a,b)(a,b) 内可导,则存在 ξ∈(a,b)\xi \in (a,b)ξ∈(a,b),使得
f(b)−f(a)=f′(ξ)(b−a). f(b)-f(a)=f'(\xi)(b-a). f(b)−f(a)=f′(ξ)(b−a).
函数在区间上的平均变化率,等于某一点处的瞬时变化率。
在区间 a,ba,ba,b 上,至少存在一点,其切线斜率等于割线斜率;当附加条件 f(a)=f(b)f(a)=f(b)f(a)=f(b) 时,拉格朗日中值定理自然退化为罗尔定理。
罗尔定律的升级版,"撤销"了等高的限制。可以想象把罗尔定理的那张图整体旋转了一个角度,它依然成立。
这是拉格朗日定理最出名的生活例子------区间测速:
假设你开车上高速,在 A 收费站(t=at=at=a)领卡,在 B 收费站(t=bt=bt=b)交卡。
- 如果两站距离 120 公里,你花了一个小时跑完。
- 你的平均时速 是 120 km/h120\text{ km/h}120 km/h。
- 拉格朗日定理告诉你:在这一小时里的某一个瞬间 ,你仪表盘上的速度(瞬时速度)一定精确地出现过 120 km/h120\text{ km/h}120 km/h。
如果你平均时速是 130 km/h130\text{ km/h}130 km/h(限速 120),就算你全程没被测速雷达拍到,交警根据拉格朗日定理也能判定你至少在那一瞬间超速了。
柯西中值定理(Cauchy Mean Value Theorem)
设函数 f(x)f(x)f(x) 与 g(x)g(x)g(x) 在 a,ba,ba,b 上连续、在 (a,b)(a,b)(a,b) 内可导,且 g′(x)≠0g'(x)\neq 0g′(x)=0,则存在 ξ∈(a,b)\xi \in (a,b)ξ∈(a,b),使得
f(b)−f(a)g(b)−g(a)=f′(ξ)g′(ξ). \frac{f(b)-f(a)}{g(b)-g(a)}=\frac{f'(\xi)}{g'(\xi)}. g(b)−g(a)f(b)−f(a)=g′(ξ)f′(ξ).
柯西中值定理刻画了两个函数变化率之间的比例关系 ,是拉格朗日中值定理在"比值形式"下的推广;它是 洛必达法则 的理论基础。
直观理解:两名赛跑者
想象有两名赛跑者 AAA 和 BBB 在同一段时间 a,ba, ba,b 内跑步:
- f(t)f(t)f(t) 是跑者 AAA 的位置随时间的变化;
- g(t)g(t)g(t) 是跑者 BBB 的位置随时间的变化。
在整场比赛中,他们的平均速度之比是:
f(b)−f(a)g(b)−g(a) \frac{f(b) - f(a)}{g(b) - g(a)} g(b)−g(a)f(b)−f(a)
柯西中值定理告诉我们:在比赛过程中的某个瞬间 ξ\xiξ,他们瞬时速度的比值 ,正好等于他们全程平均速度的比值。
导数的主要应用方向
导数不仅是局部变化率的刻画工具,更是研究函数整体性质的核心手段。
函数的单调性
若在区间内 f′(x)>0f'(x)>0f′(x)>0,则 f(x)f(x)f(x) 单调递增;若 f′(x)<0f'(x)<0f′(x)<0,则 f(x)f(x)f(x) 单调递减;这是拉格朗日中值定理最直接、最重要的应用之一。
极值与最值问题
通过解方程 f′(x)=0f'(x)=0f′(x)=0 或导数不存在,确定驻点;
利用二阶导数:
f′′(x)>0f''(x)>0f′′(x)>0:极小值;
f′′(x)<0f''(x)<0f′′(x)<0:极大值。
这是函数优化与应用问题的理论基础。
函数的凹凸性与拐点
f′′(x)>0f''(x)>0f′′(x)>0:函数呈凹形(开口向上) ;f′′(x)<0f''(x)<0f′′(x)<0:函数呈凸形(开口向下) ;二阶导数变号的点为拐点;凹凸性决定了函数图形的整体形态。
洛必达法则(L'Hôpital's Rule)
当极限呈现 00\frac{0}{0}00 或 ∞∞\frac{\infty}{\infty}∞∞ 型未定式时,可通过导数将问题转化为:
limf(x)g(x)=limf′(x)g′(x). \lim \frac{f(x)}{g(x)}=\lim \frac{f'(x)}{g'(x)}. limg(x)f(x)=limg′(x)f′(x).
其理论依据正是柯西中值定理。
泰勒公式(Taylor's Formula)
泰勒公式可视为微分中值定理的精细化与高阶推广,它用多项式在局部逼近复杂函数,并通过余项精确刻画误差:
f(x)=f(x0)+f′(x0)(x−x0)+⋯+f(n)(ξ)n!(x−x0)n. f(x)=f(x_0)+f'(x_0)(x-x_0)+\cdots+\frac{f^{(n)}(\xi)}{n!}(x-x_0)^n. f(x)=f(x0)+f′(x0)(x−x0)+⋯+n!f(n)(ξ)(x−x0)n.
在数值计算、误差分析和工程建模中具有基础性作用。
!NOTE
具体的就不再进行标记,这里的泰勒级数可以展开的说一下,主要是比较特别,而且联系到了傅里叶变换以及坐标系,很多地方都用到了,包括线性空间等,甚至CRC校验里也有泰勒公式的身影。
泰勒公式不仅可以理解为线性空间,它实际上是函数空间向线性空间(向量空间)投影、分解的一种极致体现。泰勒展开就是把一个复杂的、难以捉摸的连续函数,投影到了由多项式构成的无限维线性空间中。
A. 导数(局部信息决定整体行为)
泰勒公式的核心假设是:一个函数在某一点的各阶导数,包含了该函数在附近区域的所有基因。
这是一种"窥一斑而知全豹"的能力。如果函数是"解析"的(如 sinx,ex\sin x, e^xsinx,ex),那么它在一点的信息确实可以无限延伸到整个定义域。
B. 多项式逼近定理(Weierstrass Approximation Theorem)
这是泰勒公式在函数空间里的"合法性"来源。
- 该定理证明:对于闭区间上的任何连续函数,都可以用多项式以任意精度去逼近。
- 泰勒公式给出了这种逼近的一种具体构造方法。
C. 微积分基本定理与中值定理(逻辑链条)
泰勒公式不是凭空产生的,它是通过对导数进行反复积分推导出来的:
- 一阶支撑: 拉格朗日中值定理(确保了一阶导数可以描述函数增量)。
- 二阶及以上: 通过对 f′(t)f'(t)f′(t) 在 x0,xx_0, xx0,x 上反复使用积分中值定理,最终像剥洋葱一样剥出了高阶项和余项。
已知求未知
不定积分 是已知函数的导数,反过来求原函数。
如果函数 F(x)F(x)F(x) 的导数等于 f(x)f(x)f(x),即
F′(x)=f(x), F'(x)=f(x), F′(x)=f(x),
那么称
∫f(x) dx=F(x)+C \int f(x)\,\mathrm{d}x = F(x) + C ∫f(x)dx=F(x)+C
为 f(x)f(x)f(x) 的不定积分。
其中,F(x)F(x)F(x):一个原函数
CCC:积分常数(任意常数)
为什么一定要加「+ C」
导数会丢失常数信息:
ddx(F(x)+C)=F′(x). \frac{\mathrm{d}}{\mathrm{d}x}(F(x)+C)=F'(x). dxd(F(x)+C)=F′(x).
因此所有相差一个常数的函数都有相同的导数 ;不定积分描述的不是"一个函数",而是一族函数:
{F(x)+C∣C∈R}. \{F(x)+C \mid C\in\mathbb{R}\}. {F(x)+C∣C∈R}.
导数是给出曲线在每一点的切线斜率 ;不定积分是在已知"斜率场"的情况下,恢复可能的曲线族 ;可以理解为:已知每一点怎么"走",反推"从哪儿来"。
!NOTE
不定积分 ≠ 面积
这是最容易混淆的地方:
概念 含义 不定积分 求原函数(代数对象) 定积分 求区间累积量(面积、物理量) ∫f(x) dx不是∫abf(x) dx \int f(x)\,\mathrm{d}x \quad\text{不是}\quad \int_a^b f(x)\,\mathrm{d}x ∫f(x)dx不是∫abf(x)dx
面积意义只属于定积分。
这部分感觉比较重要,着重处理
不定积分是从局部信息重构全局系统的逆向工程。
不定积分的运算本质
不定积分的所有技巧,本质都在做一件事:把表达式变形,凑成"某个函数的导数"。
例如:
∫2x dx因为(x2)′=2x \int 2x\,\mathrm{d}x \quad\text{因为}\quad ( x^2 )' = 2x ∫2xdx因为(x2)′=2x
所以:
∫2x dx=x2+C \int 2x\,\mathrm{d}x = x^2 + C ∫2xdx=x2+C
常见基本不定积分
∫xn dx=xn+1n+1+C(n≠−1) \int x^n\,\mathrm{d}x = \frac{x^{n+1}}{n+1}+C \quad (n\neq -1) ∫xndx=n+1xn+1+C(n=−1)
微分中值定理:从整体变化推出某点的导数信息
不定积分:从局部变化(导数)反推出整体函数形态
两者在逻辑上是一对互补操作:
导数 ⟺ 不定积分 \text{导数} \;\Longleftrightarrow\; \text{不定积分} 导数⟺不定积分
不定积分不是算面积,而是"对导数做逆运算,找出所有可能的原函数"。是不是还挺意外的,不定积分就是这样一个东西,找原函数,纯粹的可怜。
定于不定的世界
既然有不定积分,那就有定积分,所以呢~
我们在各种学科里面,其实用的最多的东西是定积分,在说积分的时候也是说的定积分。
定积分描述的是:
在一个确定区间内,函数值的累积效果。
设函数 f(x)f(x)f(x) 在区间 a,ba,ba,b 上可积,则
∫abf(x) dx \int_a^b f(x)\,\mathrm{d}x ∫abf(x)dx
称为 f(x)f(x)f(x) 在 a,ba,ba,b 上的定积分。
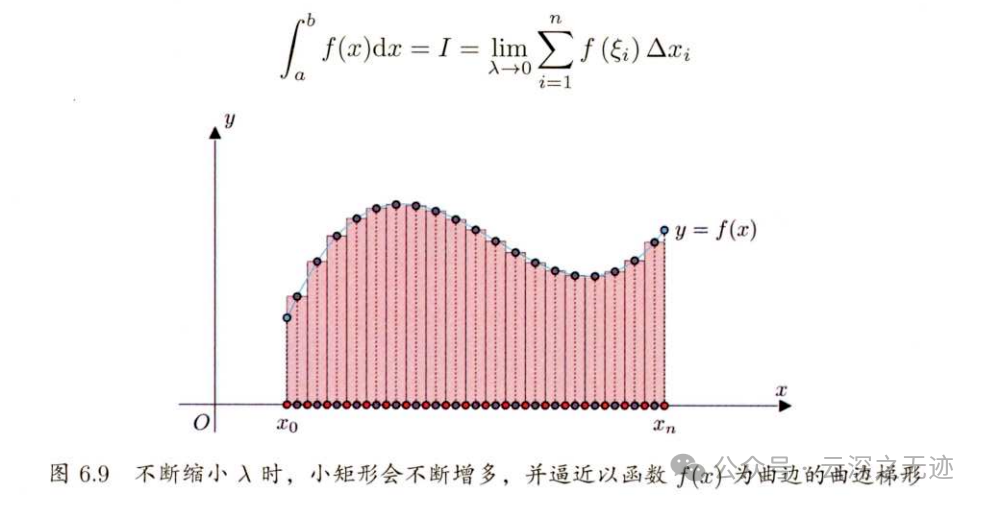
直观本质(从"加法极限"理解)
定积分的本质不是"算公式",而是一个极限过程:
- 把区间 a,ba,ba,b 分成很多小段
- 每一小段近似看成一个"长为 Δx\Delta xΔx、高为 f(xi)f(x_i)f(xi)"的矩形
- 把所有小矩形面积加起来
- 让分段无限细(Δx→0\Delta x \to 0Δx→0)
数学表达为:
$$
\int_a^b f(x),\mathrm{d}x
\lim_{n\to\infty}
\sum_{i=1}^n f(x_i),\Delta x
$$
定积分 = 连续量的极限求和
几何意义(但不止是面积)
当 f(x)≥0f(x)\ge 0f(x)≥0:定积分等于曲线与 xxx 轴之间的面积
当 f(x)f(x)f(x) 有正有负:定积分等于代数面积(正负抵消)
注意:
定积分本质是"累积量",面积只是其中一种解释。
定积分在物理中极其自然:
| 被积函数 | 定积分意义 |
|---|---|
| 速度v(t)v(t)v(t) | 位移 |
| 电流i(t)i(t)i(t) | 电荷 |
| 功率p(t)p(t)p(t) | 能量 |
| 概率密度 | 概率 |
统一理解为:
总量=∫"密度"×"尺度" \text{总量} = \int \text{"密度"} \times \text{"尺度"} 总量=∫"密度"×"尺度"
!NOTE
这部分解释的,有点茅塞顿开的感觉,但是吧,道理到处都有,还是要仔细的品。剑来里有这么个意思,最好的道理都是在几块钱的书本上,这样才能让众人学习,知识本身就是廉价的,越廉价越好,但是要反复的去琢磨,才能够明白。有事没事多看看。
不定积分是"因",定积分是"果";不定积分是"过程",定积分是"状态的改变量"。
微积分基本定理(核心桥梁)
我们看出来了,定积分就是累积,但是呢,计算方式只有切片,累积,求极限,真踏马咋算啊。
定积分可以通过原函数来计算。
若 F′(x)=f(x)F'(x)=f(x)F′(x)=f(x),则:
∫abf(x) dx=F(b)−F(a) \int_a^b f(x)\,\mathrm{d}x= F(b)-F(a) ∫abf(x)dx=F(b)−F(a)
这一定理把:极限求和(定积分定义) 和 导数的逆运算(不定积分) 严密地连接在一起。
为什么"上下限一减,常数就没了"
因为:
(F(x)+C)∣ab=(F(b)+C)−(F(a)+C)=F(b)−F(a) (F(x)+C)\Big|_a^b= (F(b)+C)-(F(a)+C)= F(b)-F(a) (F(x)+C) ab=(F(b)+C)−(F(a)+C)=F(b)−F(a)
这就是为什么:不定积分一定要加 +C+C+C,定积分结果却不含常数
重要性质(工程/数学都常用)
区间可加性
∫abf(x) dx=∫acf(x) dx+∫cbf(x) dx \int_a^b f(x)\,\mathrm{d}x= \int_a^c f(x)\,\mathrm{d}x + \int_c^b f(x)\,\mathrm{d}x ∫abf(x)dx=∫acf(x)dx+∫cbf(x)dx
线性性
∫ab(αf+βg) dx=α∫abf dx+β∫abg dx \int_a^b (\alpha f+\beta g)\,\mathrm{d}x= \alpha\int_a^b f\,\mathrm{d}x + \beta\int_a^b g\,\mathrm{d}x ∫ab(αf+βg)dx=α∫abfdx+β∫abgdx
区间反向变号
∫baf(x) dx=−∫abf(x) dx \int_b^a f(x)\,\mathrm{d}x= -\int_a^b f(x)\,\mathrm{d}x ∫baf(x)dx=−∫abf(x)dx
导数:局部变化率, 定积分:局部变化率的全局累积
结合中值定理,可以得到:
在某一点,瞬时值等于整体平均效果
这正是物理与工程中"等效""平均"的数学基础。
定积分不是算面积,而是"对连续变化进行极限求和,得到一个确定的总量"。
定积分把无数个离散的、局部的"瞬时变化",通过无穷求和的方式,"缝合"成了一个宏观的"跨度"。
从"信号"开始:你到底在积分什么?
在工程里,信号不是函数,是"物理量随时间变化" :
电压信号:v(t)v(t)v(t)(V)
电流信号:i(t)i(t)i(t)(A)
速度信号:v(t)v(t)v(t)(m/s)
加速度信号:a(t)a(t)a(t)(m/s²)
关键信息:
信号本身往往不是我们最终关心的量,而是"变化率"或"密度"。
第一层积分:信号 → 累积量(物理)
速度 → 位移
x(t)=∫v(t) dt x(t)=\int v(t)\,\mathrm{d}t x(t)=∫v(t)dt
v(t)v(t)v(t):瞬时变化率
积分结果:真实走过的路程
积分 = 把"瞬时贡献"累加成"总效果"
电流 → 电荷
Q=∫i(t) dt Q=\int i(t)\,\mathrm{d}t Q=∫i(t)dt
电流是"电荷流动速率",积分给出"流过了多少电荷"。
功率 → 能量(最重要)
E=∫p(t) dt E=\int p(t)\,\mathrm{d}t E=∫p(t)dt
功率是"能量变化率",能量才是系统真正消耗/存储的东西
第一层结论:
定积分在工程中 = 对"密度 / 变化率"的时间累积
在这多想一句,都是对时间的积分,主要是在时间域上。
第二层:信号平方 → 能量
电信号的能量从哪来?
电阻上的瞬时功率:
p(t)=v2(t)R p(t)=\frac{v^2(t)}{R} p(t)=Rv2(t)
于是能量:
E=∫v2(t)R dt E=\int \frac{v^2(t)}{R}\,\mathrm{d}t E=∫Rv2(t)dt
忽略常数 1/R1/R1/R,工程上定义:
E∝∫v2(t) dt \boxed{E \propto \int v^2(t)\,\mathrm{d}t} E∝∫v2(t)dt
为什么是平方,而不是绝对值?
正负电压 都在消耗能量,线性积分会正负抵消 ;平方积分保证:能量 ≥ 0,与物理功耗一致,这一步直接导致了:RMS,功率谱密度(PSD),噪声分析,信噪比(SNR)。
第三层:有限时间 → 平均 → RMS
工程里你永远不可能积分到无穷 ,于是引入时间窗 TTT。
平均功率
Pavg=1T∫0Tv2(t) dt P_{\text{avg}}= \frac{1}{T}\int_0^T v^2(t)\,\mathrm{d}t Pavg=T1∫0Tv2(t)dt
RMS 的真正定义
vRMS=1T∫0Tv2(t) dt v_{\text{RMS}}= \sqrt{ \frac{1}{T}\int_0^T v^2(t)\,\mathrm{d}t } vRMS=T1∫0Tv2(t)dt
这不是"定义出来的",而是功率反推出来的。
RMS 是"等效直流功率"的数学形式积分是为了能量,平均是为了稳态
第四层:频域视角(Parseval 等价)
工程师不总在时域干活。
时域能量
E=∫∣x(t)∣2 dt E=\int |x(t)|^2\,\mathrm{d}t E=∫∣x(t)∣2dt
频域等价
E=∫∣X(f)∣2 df E=\int |X(f)|^2\,\mathrm{d}f E=∫∣X(f)∣2df
这不是巧合,是 Parseval 定理
!NOTE
在信号处理和数学分析中,帕塞瓦尔定理 (Parseval's Identity/Theorem),也常被称为能量等价原理 ,是连接时域(或空域)与频域的桥梁。
简单来说,它的核心意义是:信号在时域的总能量,等于它在频域的总能量。 ---
数学表达式
对于一个能量有限的连续信号 f(t)f(t)f(t),其傅里叶变换为 F(ω)F(\omega)F(ω),等价关系表达为:
∫−∞∞∣f(t)∣2dt=12π∫−∞∞∣F(ω)∣2dω \int_{-\infty}^{\infty} |f(t)|^2 dt = \frac{1}{2\pi} \int_{-\infty}^{\infty} |F(\omega)|^2 d\omega ∫−∞∞∣f(t)∣2dt=2π1∫−∞∞∣F(ω)∣2dω
- 左侧: 信号在时域内对平方的积分,代表总能量。
- 右侧: 信号在频域内对功率谱密度的积分,同样代表总能量。
注意: 系数(如 12π\frac{1}{2\pi}2π1)取决于你使用的傅里叶变换定义(角频率 ω\omegaω 还是频率 fff)。如果是离散傅里叶变换(DFT),则表现为序列平方和的等价。
工程结论
噪声能量 = PSD × 带宽,滤波器改变能量 = 改变积分范围,ENBW 本质 = 等效积分宽度
把"定积分"放进工程统一框架
现在我们可以可以把所有东西放进一张表:
| 场景 | 被积函数 | 积分意义 |
|---|---|---|
| 速度 | v(t)v(t)v(t) | 位移 |
| 电流 | i(t)i(t)i(t) | 电荷 |
| 功率 | p(t)p(t)p(t) | 能量 |
| 信号 | x2(t)x^2(t)x2(t) | 信号能量 |
| 噪声 PSD | S(f)S(f)S(f) | 噪声功率 |
定积分在工程中的真正身份 : "连续能量 / 物理量守恒的计算工具" 。
在工程里,定积分不是数学工具,而是"能量守恒的计算语言"。信号 → 平方 → 积分 → 能量 → 性能指标
如果上面是工程的故事,那下面就是哲学的世界,为什么在自然、物理、测量、信号与系统里,积分几乎不可替代这个角度,给一个体系化的答案。
积分之所以有用,是因为:世界中"有意义的量",几乎都不是瞬时值,而是"在时间或频率上的累积效应"。
积分不是一种数学技巧,而是描述"累积、记忆、平均、能量、概率"的唯一一致语言。
为什么"瞬时值"在真实系统里几乎没有意义?
瞬时值是理想化的、人造的概念
在数学里x(t0)x(t_0)x(t0) 是一个点,可以被精确讨论;但在现实系统中:没有无限带宽,没有零噪声,没有零时间分辨率;所以:任何真实系统,都无法"看到一个点",它只能看到"一段时间的影响"。
所以"测量"必然等价于积分
无论你承认与否,任何测量都等价于:
y=∫x(t) w(t) dt y = \int x(t)\,w(t)\,dt y=∫x(t)w(t)dt
只是你可能叫它:平均,滤波,累加,相关,能量计算;但数学上,它们全是积分。
积分 = "记忆"的数学形式
没有积分,就没有"系统"
一个系统的根本特征是:它会记住过去对现在的影响 ;数学上,"记住过去"只有一种办法: 把过去的值加进来,这就是积分。
RC 电路:
V(t)=1RC∫−∞tx(τ)e−(t−τ)/RCdτ V(t)=\frac{1}{RC}\int_{-\infty}^t x(\tau)e^{-(t-\tau)/RC}d\tau V(t)=RC1∫−∞tx(τ)e−(t−τ)/RCdτ
FIR 滤波器:
yn=∑kxn−khk yn=\sum_k xn-khk yn=k∑xn−khk
平均值:
xˉ=1T∫0Tx(t) dt \bar{x}=\frac{1}{T}\int_0^T x(t)\,dt xˉ=T1∫0Tx(t)dt
系统 = 积分器 + 权重函数
积分是"从微观到宏观"的唯一桥梁
微观噪声是不可预测的,只能"统计"
噪声在微观层面是:随机,不可预测,瞬时值毫无意义
唯一能做的是:
把它们"加起来",看整体效应
这在数学上只能通过积分实现。
为什么 RMS、功率、能量都离不开积分
能量:
E=∫∣x(t)∣2dt E=\int |x(t)|^2 dt E=∫∣x(t)∣2dt
功率谱:
σ2=∫S(f)∣H(f)∣2df \sigma^2=\int S(f)|H(f)|^2 df σ2=∫S(f)∣H(f)∣2df
Allan variance:本质也是对 PSD 的加权积分
所有"稳定的、可比较的物理量",都是积分量
!NOTE
阿伦方差 (Allan Variance, AVAR),又称双样本方差 ,是表征时钟、振荡器以及各类传感器(如你关注的雷达系统中的晶振或陀螺仪)频率稳定度的一种时域测量指标。
与计算所有数据平均值的传统方差不同,阿伦方差关注的是相邻两个采样段平均值之间的差异。
若有一组频率偏离数据,将其分成时长为 τ\tauτ 的若干段,其数学表达式为:
σy2(τ)=12(M−1)∑i=1M−1(yˉi+1−yˉi)2 \sigma_y^2(\tau) = \frac{1}{2(M-1)} \sum_{i=1}^{M-1} (\bar{y}_{i+1} - \bar{y}_i)^2 σy2(τ)=2(M−1)1i=1∑M−1(yˉi+1−yˉi)2
- **τ\tauτ** (相关时间/平滑时间) :这是阿伦方差的自变量。改变 τ\tauτ 的大小,可以分析不同时间尺度下的稳定性。
- yˉi\bar{y}_iyˉi :第 iii 个时间段内的平均频率。
- 物理意义 :它测量的是系统在间隔为 τ\tauτ 的两次测量之间,频率发生"漂移"或"波动"的程度。
积分天然"压制无结构,保留有结构 "
这是积分最"神奇"、也是最核心的能力。
为什么积分能"消噪"?
考虑两类信号:
随机的:正负交替、无结构
有结构的:同相、同频、相关
积分对它们的作用完全不同:
随机项:
∫n(t) dt→增长慢 / 相互抵消 \int n(t)\,dt \to \text{增长慢 / 相互抵消} ∫n(t)dt→增长慢 / 相互抵消
相干项:
∫Acos(ωt)cos(ωt) dt→线性累加 \int A\cos(\omega t)\cos(\omega t)\,dt \to \text{线性累加} ∫Acos(ωt)cos(ωt)dt→线性累加
积分是"相关性的放大器,不相关性的湮灭器" (我好喜欢湮灭这个词啊)
这不是技巧,这是数学必然性。
积分是"尺度变换"的工具
积分把"细节"变成"尺度"
当做积分时,在说一句非常物理的话:
"我不关心微小起伏,我关心整体趋势"
这意味着:积分 = 放弃高频细节,积分 = 选择一个时间/频率尺度。
这就是为什么积分天然连接到带宽、ENBW、τ
积分时间 ↑→ 有效带宽 ↓→ 噪声 ↓→ 响应慢,这是任何测量系统绕不开的尺度权衡。
积分是唯一"坐标无关"的操作
这是一个非常深的数学事实。
积分在变换下仍然成立
换坐标,等效为换表示(时域 ↔ 频域),换基函数也是如此;积分的物理意义不变。这也是为什么:Parseval 定理,能量守恒,PSD 积分在不同表象下仍然一致。
积分是"表象无关"的量
为什么信号链里"越走越离不开积分"?
现在把话说得非常直接:我们关心的是噪声底,稳定性,分辨率,长期行为,可重复性,而这些东西没有一个是瞬时的。
它们本质上全是:
某种积分意义下的统计量
所以会自然发现:ENBW 是积分定义,Allan variance 是积分定义,Lock-in 是积分实现,滤波是积分实现,平均是积分实现。
底层原因
如果只允许一句话解释"为什么积分这么有用",那就是:自然界的噪声是局部的,而我们关心的物理量是整体的;积分是从"局部不确定"通向"整体确定"的唯一道路。
在真实系统中,瞬时值既不可观测,也不可重复。所有有意义的测量,都是对随机过程在某个尺度上的累积响应。积分之所以无处不在,不是因为数学家喜欢它,而是因为这是唯一能把随机性压缩成稳定数量的数学结构。
不定积分不是算面积,而是"对导数做逆运算,找出所有可能的原函数"。