一、问题的提出:
问题是这样的,在四轮定位中,方向盘在不断左右转动的情况,要快速获取转向角10°点对应外倾角数据来计算四轮定位的相关参数。由于车身存在发动机的振动,导致传感器数据会存在一定的跳动,在采集10°转向角的数据点时,实时采集到的传感器数据不那么准确,会有一个小幅度的波动。
那么如何才能采集准确呢?
考虑到小角度范围内,轮胎转向角和轮胎外倾角之间可能是线性关系。这样我们就可以实时采集7°到10°的多个点的外倾角数据,然后使用最小二乘拟合法来精准计算10°点时的外倾角。
下图是手测的一组数据,左侧为轮胎转向角,右侧为外倾角。
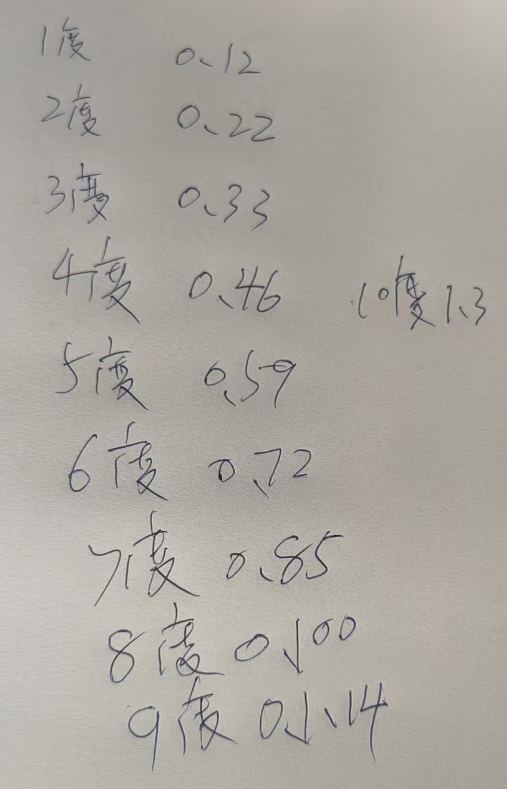
将上图生成二维图,如下:
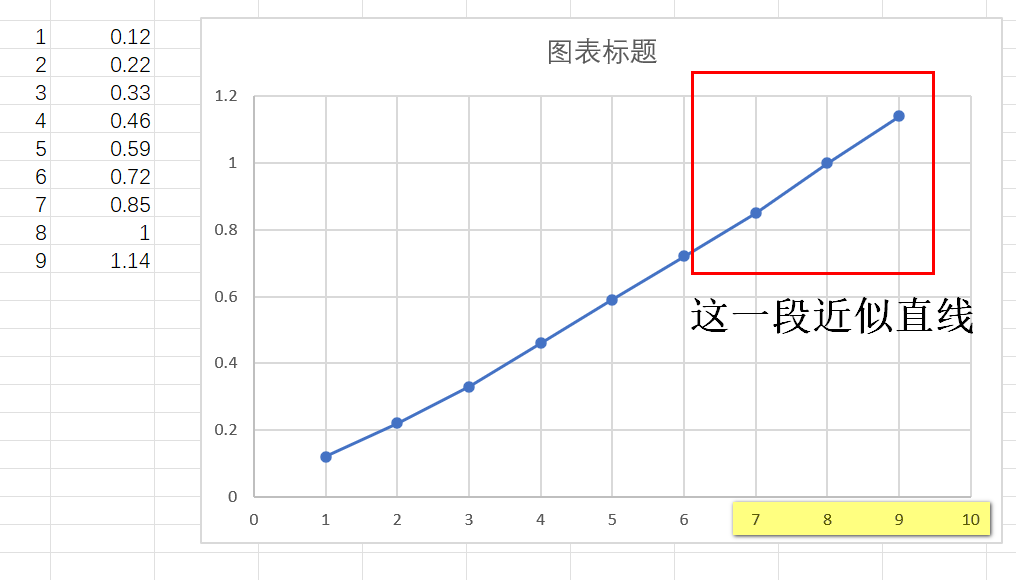
可以看到,确实是近似直线。
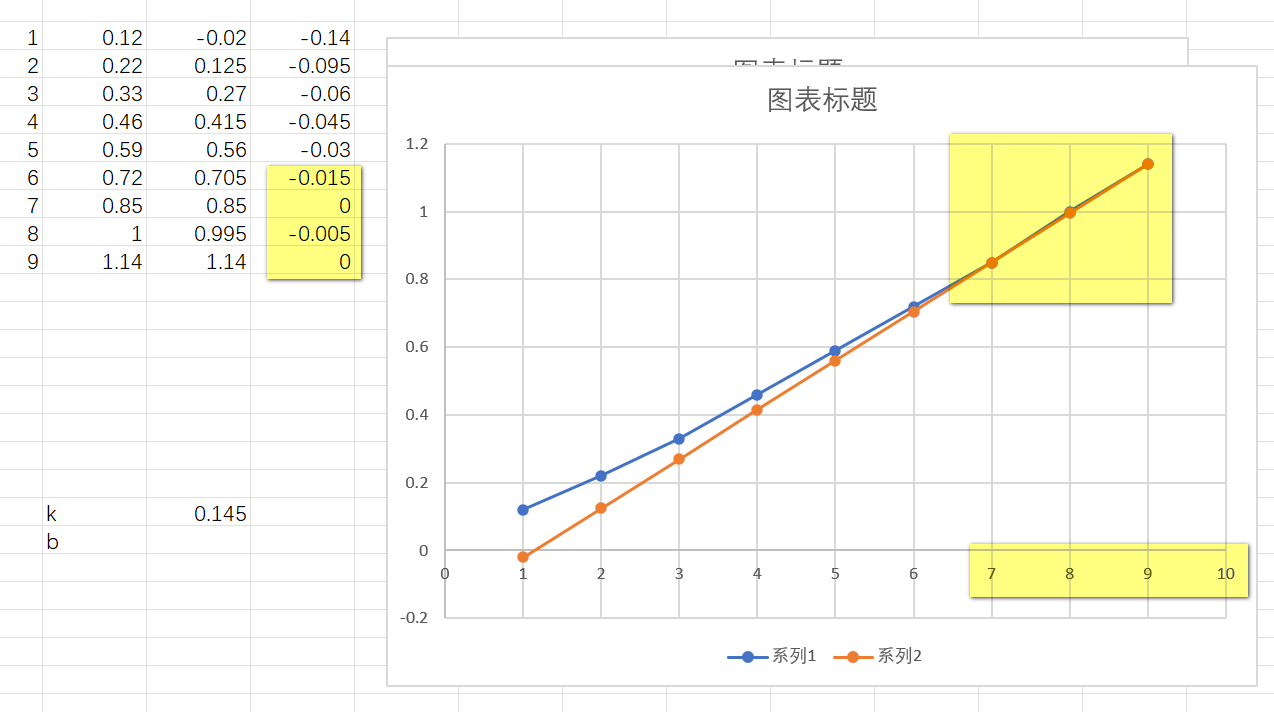
即使做一个简单的直线拟合,也可以看到7-9°之间的误差只有0.005°。这说明这个思路是完全可行。
二、解决方法:
下面就开始正式进行讲解解决方案。
基于轮胎转向角和外倾角的采样数据,实现线性最小二乘法拟合,根据拟合出的直线方程,计算任意转向角对应的外倾角(比如 10°),并最小化传感器噪声带来的误差。
1、算法原理
线性拟合的核心是求直线方程 y = k*x + b(x = 转向角,y = 外倾角):
- 斜率
k = (n*Σxy - Σx*Σy) / (n*Σx² - (Σx)²) - 截距
b = (Σy - k*Σx) / n其中: n是数据点数量Σx是所有转向角的和,Σy是所有外倾角的和Σxy是每个 x*y 的和,Σx²是每个 x² 的和
2、完整 C 函数实现
现在给出函数,该函数无依赖,可直接放入 STM32 工程,支持任意数量的采样点:
cpp
#include <stdint.h>
#include <math.h> // 数学计算
/**
* @brief 线性最小二乘法拟合(y = k*x + b)
* @param data: 二维数组,格式为[data[0][0]=转向角1, data[0][1]=外倾角1,
data[1][0]=转向角2, data[1][1]=外倾角2,...]
* @param data_num: 数据点数量(比如你的示例是9个点,填9)
* @param k: 输出参数,拟合直线的斜率
* @param b: 输出参数,拟合直线的截距
* @retval 0: 成功,-1: 输入参数错误(避免除零)
*/
int32_t linear_least_square_fit(const float data[][2], uint8_t data_num,
float *k, float *b)
{
// 入参合法性检查
if (data == NULL || k == NULL || b == NULL || data_num < 2)
{
return -1; // 至少需要2个点才能拟合直线
}
// 初始化求和变量
float sum_x = 0.0f; // Σx
float sum_y = 0.0f; // Σy
float sum_xy = 0.0f; // Σxy
float sum_x2 = 0.0f; // Σx²
// 遍历所有数据点,计算各项求和值
for (uint8_t i = 0; i < data_num; i++)
{
sum_x += data[i][0];
sum_y += data[i][1];
sum_xy += data[i][0] * data[i][1];
sum_x2 += data[i][0] * data[i][0];
}
// 计算分母(避免除零)
float denominator = data_num * sum_x2 - sum_x * sum_x;
if (fabs(denominator) < 1e-6) // 分母接近0,说明所有x值相同,无法拟合
{
return -1;
}
// 计算斜率k和截距b
*k = (data_num * sum_xy - sum_x * sum_y) / denominator;
*b = (sum_y - *k * sum_x) / data_num;
return 0;
}
/**
* @brief 根据拟合的直线方程,计算任意转向角对应的外倾角
* @param angle: 输入的转向角(比如10°)
* @param k: 拟合得到的斜率
* @param b: 拟合得到的截距
* @retval 对应的外倾角
*/
float calculate_camber_angle(float angle, float k, float b)
{
return k * angle + b;
}
// ========== 测试示例 ==========
int main(void)
{
// 采样数据:[转向角, 外倾角]
// 根据实际情况来,如果采集了30个数据,相应代码稍作修改。
// 如果采集10°转向点,那么请仅只采集10°附近的点,比如从7°开始到10°。
// 下面的示例是从1°开始的,请尽量不要这么做,因为角度越远误差越大。
float camber_data[9][2] = {
{1.0f, 0.12f},
{2.0f, 0.22f},
{3.0f, 0.33f},
{4.0f, 0.46f},
{5.0f, 0.59f},
{6.0f, 0.72f},
{7.0f, 0.85f},
{8.0f, 1.00f},
{9.0f, 1.14f}
};
float k_fit = 0.0f; // 拟合斜率
float b_fit = 0.0f; // 拟合截距
// 执行线性拟合
if (linear_least_square_fit(camber_data, 9, &k_fit, &b_fit) == 0)
{
// 输出拟合结果(可通过串口打印到上位机)
// 示例:k≈0.1267,b≈-0.0178(基于你的数据计算)
// printf("拟合直线:y = %.4f*x + %.4f\r\n", k_fit, b_fit);
// 计算10°转向角对应的外倾角
float camber_10 = calculate_camber_angle(10.0f, k_fit, b_fit);
// printf("10°转向角对应的外倾角:%.4f\r\n", camber_10); // 约1.249°
}
else
{
// 拟合失败处理(比如串口打印错误)
// printf("线性拟合失败!\r\n");
}
while (1)
{
// TODO:
// 其他代码... ...
}
}上面就讲完了。
3、误差验证
如果需要验证拟合误差,可使用以下函数,计算每个采样点的拟合值与实际值的均方误差(MSE),越小说明拟合效果越好:
cpp
/**
* @brief 计算拟合的均方误差(验证拟合效果)
* @param data: 原始数据
* @param data_num: 数据点数量
* @param k: 拟合斜率
* @param b: 拟合截距
* @retval 均方误差(越小越好)
*/
float calculate_mse(const float data[][2], uint8_t data_num, float k, float b)
{
float mse = 0.0f;
for (uint8_t i = 0; i < data_num; i++)
{
float y_fit = k * data[i][0] + b;
mse += (y_fit - data[i][1]) * (y_fit - data[i][1]);
}
return mse / data_num;
}以上,就是全部!
这篇文章,也可以应用其他需要线性拟合的领域,特别是传感器数据处理领域,包括求解与衡量均方根误差。