目录
1.摘要
针对现有方法在大规模复杂场景中存在的任务分配不均、探索效率低和路径不稳定等问题,本文提出了一种面向未知环境的多无人机自适应协同探索方法,其融合了动态区域分配、基于熵的信息引导局部规划以及方向一致性前沿点选择三大机制,实现高效协同探索。该方法根据任务进度与环境复杂度自适应划分探索区域,优先探索高信息价值区域,并通过方向约束提升路径连续性、减少冗余转向。同时结合障碍感知可达性分析,避免低收益或复杂区域。
2.相关研究
环境感知方法
多无人机协同探索中的环境感知与建图方法对比OGM、OctoMap 和 ESDF 三类空间表示方式。
-
OGM结构简单、支持增量更新,便于前沿点提取和多传感器融合,计算与通信开销较低,但在大规模三维场景中存储开销大,且难以支持连续空间优化。
-
OctoMap 采用八叉树分层表示稀疏环境,能有效降低存储与通信成本,但多无人机场景下需频繁全局同步树结构,实时性受限。
-
ESDF提供连续空间距离信息,适用于梯度优化和高频重规划,但对计算资源、传感器同步和地图一致性要求较高,在分布式系统中易产生同步冲突。
综合功能与开销权衡,在带宽受限的分布式多无人机系统中,OGM更具轻量化优势。因此,本文采用局部OGM表示,并在此基础上设计考虑区域复杂度的动态区域分配机制,以实现低通信负担下的高效协同探索。
自主探索策略
多无人机探索策略三类主流方法:基于前沿点、基于信息增益以及基于采样的探索策略;现有方法在复杂环境下仍存在冗余探索和路径不稳定问题。为此,本文提出一种融合方向一致性与路径距离约束的前沿选择机制,并结合熵引导评价,提高路径连续性,减少重复探索,增强协同效率。
协调与分配机制
现有多无人机区域划分与协调方法多依赖静态地图或低频同步,难以适应动态环境与弱通信条件。为此,本文提出一种感知驱动的动态区域划分机制,通过融合探索率、任务负载和区域复杂度的代价函数,实现自适应区域重分配与高效协同探索。
3.提出算法
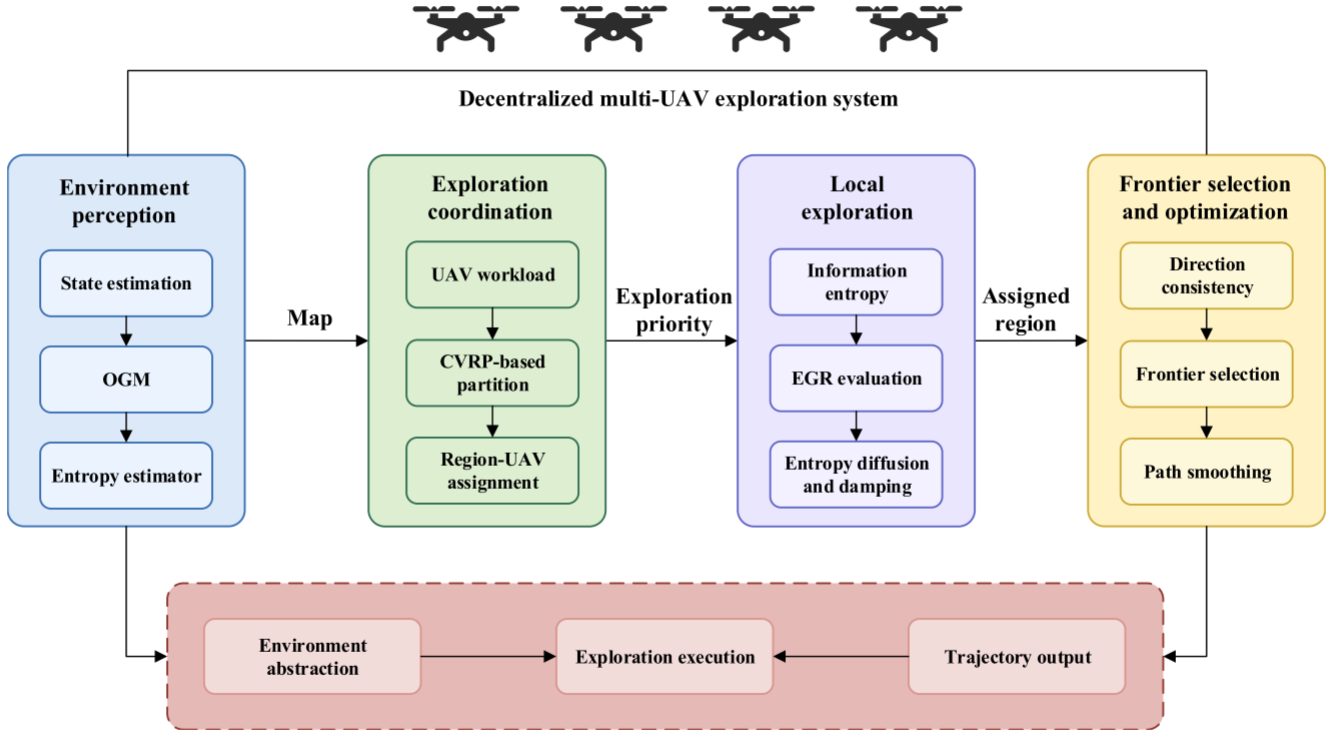
本文提出一种分层混合架构的多无人机协同探索方法,通过动态区域分配、熵引导局部规划与方向一致性前沿选择相结合,实现负载均衡、信息高效利用与路径平滑优化。在仅交换轻量级状态信息的条件下,系统在弱通信环境中仍能保持高效、稳定且可扩展的协同探索能力。
动态区域分配方法
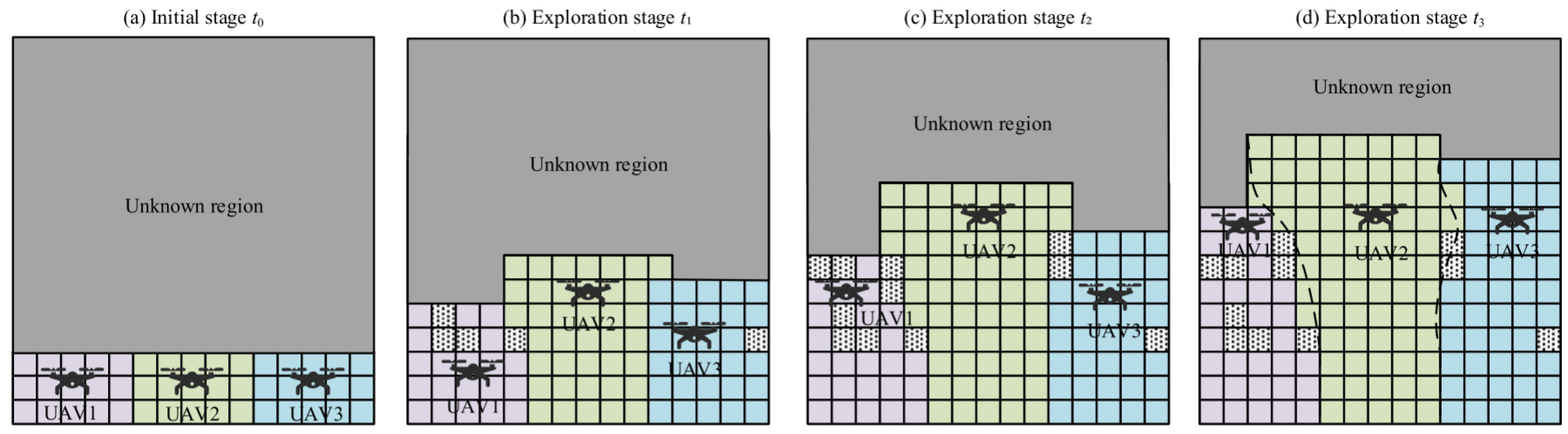
本文提出一种动态区域分配方法,在初始阶段采用基于路径距离的CVRP静态划分,其代价函数为:
C ( i , j ) = d ( i , j ) C(i,j)=d(i,j) C(i,j)=d(i,j)
其中无人机 i i i的探索负载为:
W l ( i ) = ∑ R ∈ R i N u ( R ) ⋅ D ( R ) W_l(i)=\sum_{R\in R_i}N_u(R)\cdot D(R) Wl(i)=R∈Ri∑Nu(R)⋅D(R)
实时探索率:
S ( i ) = Δ V ( i ) Δ t S(i)=\frac{\Delta V(i)}{\Delta t} S(i)=ΔtΔV(i)
为刻画区域复杂度,构建复杂度权重:
W c ( R ) = 1 S ′ ( R ) + ε + γ ⋅ T ( R ) W_c(R)=\frac{1}{S^{\prime}(R)+\varepsilon}+\gamma\cdot T(R) Wc(R)=S′(R)+ε1+γ⋅T(R)
在初始CVRP静态划分基础上,通过构建融合多因素的综合代价函数并采用熵权法自适应调整权重,实现区域的实时重分配与负载均衡:
C ′ ( i , j ) = f ( C ( i , j ) , W l ( i ) , S ( i ) , W c ( R ) ) C^{\prime}(i,j)=f\left(C(i,j),W_l(i),S(i),W_c(R)\right) C′(i,j)=f(C(i,j),Wl(i),S(i),Wc(R))
局部探索优化方法
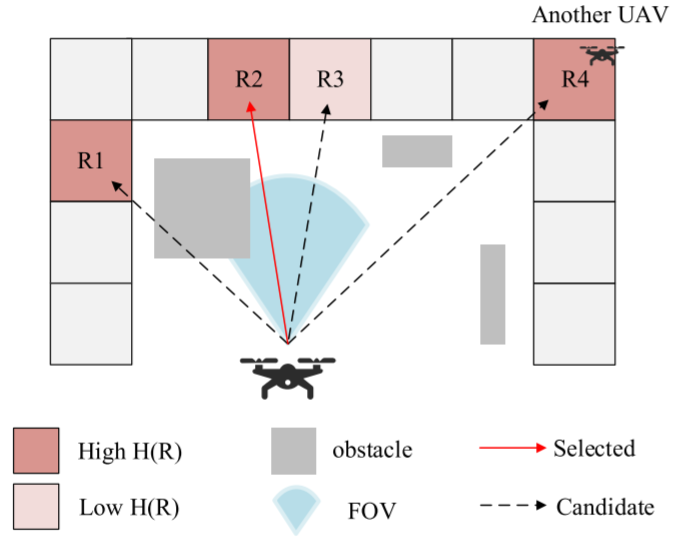
本文提出一种基于熵增益率(EGR)的局部探索优化方法,用于在环境不确定与资源受限条件下优先选择高信息价值区域。首先构建体素级区域熵指标:
H ( R ) = N u ( R ) N t ( R ) ( 1 − N o ( R ) N t ( R ) ) H(R)=\frac{N_u(R)}{N_t(R)}\left(1-\frac{N_o(R)}{N_t(R)}\right) H(R)=Nt(R)Nu(R)(1−Nt(R)No(R))
熵增益率:
E G R ( i , R ) = H ( R ) d ( R , p c ( i ) ) + ε ⋅ 1 1 + N v ( R ) EGR(i,R)=\frac{H(R)}{d(R,p_c(i))+\varepsilon}\cdot\frac{1}{1+N_v(R)} EGR(i,R)=d(R,pc(i))+εH(R)⋅1+Nv(R)1
同时考虑距离代价与协同冲突,对候选区域进行排序。为避免重复探索,引入时间衰减机制
H ( R ) ← H ( R ) e − ω t H(R)\leftarrow H(R)e^{-\omega t} H(R)←H(R)e−ωt
通过熵扩散---阻尼模型缓解障碍导致的信息孤岛问题:
∂ H ∂ t = α ∇ 2 H − β H ⋅ N o ( R ) \frac{\partial H}{\partial t}=\alpha\nabla^2H-\beta H\cdot N_o(R) ∂t∂H=α∇2H−βH⋅No(R)
边界选择方法
为克服传统最近邻策略忽略航向与路径复杂度所导致的路径振荡与能耗增加问题,本文提出一种方向一致性的前沿选择方法,首先方向一致性指标衡量当前速度方向与候选前沿方向的对齐程度:
D ( p f ) = cos − 1 ( ( p f − p c ) ⋅ v ∥ p f − p c ∥ ∥ v ∥ ) D(p_f)=\cos^{-1}\left(\frac{(p_f-p_c)\cdot v}{\|p_f-p_c\|\|v\|}\right) D(pf)=cos−1(∥pf−pc∥∥v∥(pf−pc)⋅v)
以障碍密度刻画路径复杂度:
P ( p f ) = N o ( p f ) N t ( p f ) P(p_f)=\frac{N_o(p_f)}{N_t(p_f)} P(pf)=Nt(pf)No(pf)
构建综合代价函数:
C f ( p f ) = w 1 d ( p f ) + w 2 P ( p f ) + w 3 D ( p f ) C_f(p_f)=w_1d(p_f)+w_2P(p_f)+w_3D(p_f) Cf(pf)=w1d(pf)+w2P(pf)+w3D(pf)
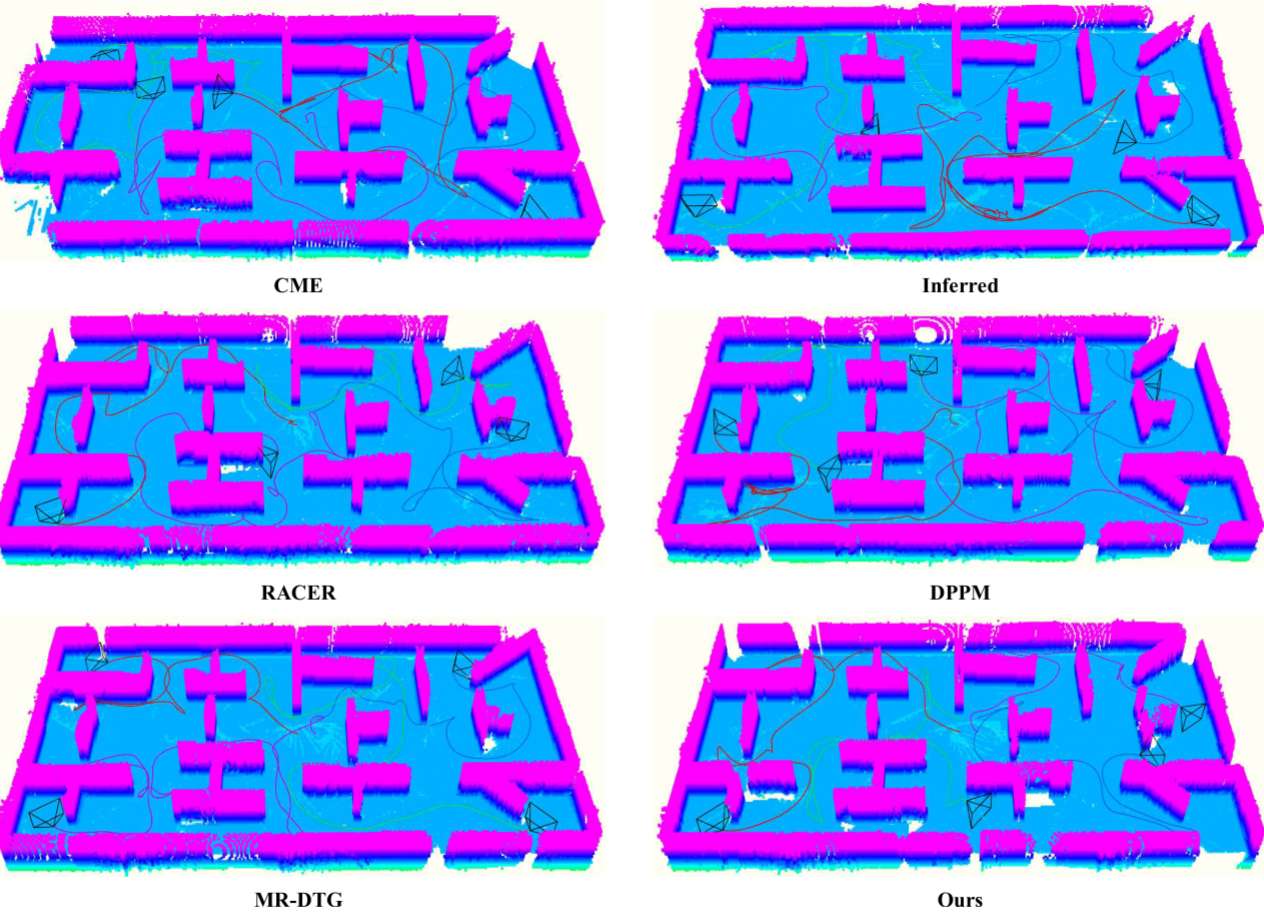
4.结果展示
5.参考文献
1 Zhao Y, Ni J, Liu J, et al. An Adaptive Coordination Exploration Approach for Multi-UAV Based on Entropy-Guided Local PlanningJ. IEEE Transactions on Automation Science and Engineering, 2025, 23: 363-378.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx