目录

1.摘要
针对海上油污持续变化与分散分布带来的持续监测难题,本文提出了一种基于熵的增量覆盖路径规划方法(EICPP),通过相邻监测周期的轮廓对比,引入增量覆盖机制,重点关注新出现的油污区域;随后结合均衡区域划分算法,在处理分散油污区域的同时,实现多无人机负载均衡;最后基于熵进行路径规划,在无人机资源受限条件下优先监测高熵区域,从而提升漂移信息新鲜度(DIF)。
2.系统模型与问题表述
油污泄漏动态模型与网格表示
为实现有效的油污监测与应急响应,本文采用 OpenDrift 作为核心仿真工具,结合物理海洋模型、油品风化过程以及真实风场和海流数据,生成油污扩散轨迹。
设监测区域为 A ⊂ R 2 A\subset\mathbb{R}^2 A⊂R2,油污在位置 ( x , y ) (x,y) (x,y)和时间 t t t的浓度表示为:
C ( x , y , t ) C(x,y,t) C(x,y,t)
为便于无人机路径规划,将连续浓度场离散化为 n × n n\times n n×n网格 G G G ,其中每个网格单元 g i , j ∈ G g_{i,j}\in G gi,j∈G对应一个地理
区域。网格单元的油污浓度通过对该区域内的连续浓度取平均得到:
c i , j ( t ) = 1 ∣ g i , j ∣ ∫ g i , j C ( x , y , t ) d x d y c_{i,j}(t)=\frac1{|g_{i,j}|}\int_{g_{i,j}}C(x,y,t)\:dx\:dy ci,j(t)=∣gi,j∣1∫gi,jC(x,y,t)dxdy
其中 ∣ g i , j ∣ |g_{i,j}| ∣gi,j∣为网格单元面积。
基于信息熵的不确定性建模
油污动态主要体现为浓度的时间变化,对于每个网格单元,定义相邻时刻之间的变化率为:
Δ c i , j ( t ) = ∣ c i , j ( t ) − c i , j ( t − 1 ) ∣ \Delta c_{i,j}(t)=|c_{i,j}(t)-c_{i,j}(t-1)| Δci,j(t)=∣ci,j(t)−ci,j(t−1)∣
为刻画时间不确定性,计算最近 k k k个时刻的平均变化率:
Δ ˉ c i , j = 1 k − 1 ∑ t = 2 k ∣ c i , j ( t ) − c i , j ( t − 1 ) ∣ \bar{\Delta}c_{i,j}=\frac1{k-1}\sum_{t=2}^k|c_{i,j}(t)-c_{i,j}(t-1)| Δˉci,j=k−11t=2∑k∣ci,j(t)−ci,j(t−1)∣
该平均变化率作为区域不确定性的基础指标。为避免不确定性为零,引入最小不确定度 u m i n : u_\mathrm{min}{:} umin:
u i , j = u min + Δ ˉ c i , j u_{i,j}=u_{\min}+\bar{\Delta}c_{i,j} ui,j=umin+Δˉci,j
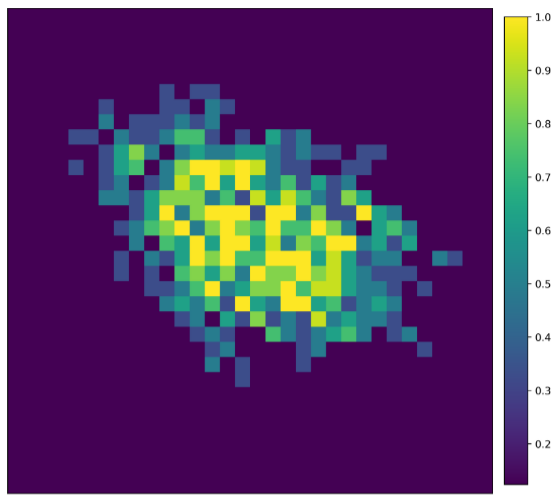
这里将不确定性映射为信息熵。采用二元熵模型,其中:
p = 0.5 ⋅ u i , j p=0.5\cdot u_{i,j} p=0.5⋅ui,j
H ( u i , j ) = − p log 2 p − ( 1 − p ) log 2 ( 1 − p ) H(u_{i,j})=-p\log_2p-(1-p)\log_2(1-p) H(ui,j)=−plog2p−(1−p)log2(1−p)
熵模型通过刻画油污浓度的时间变化,将其转化为每个网格单元的信息不确定度。熵值越高,表示区域不确定性越大,应优先进行监测。
漂移信息新鲜度
在持续监测任务中,漂移信息新鲜度(DIF) 衡量各网格单元最新观测数据对当前环境状态的代表程度。高熵区域若未及时重访,其信息价值会迅速衰减;而低熵区域则可容忍更长的观测间隔。
为同时考虑监测优先级与时间延迟,本文定义一种多项式衰减加权信息新鲜度指标:
F r e g i o n ∗ = ∑ g ∈ region w ( g ) 1 1 + λ E ( g ) ⋅ s ( g ) ∑ g ∈ region w ( g ) F_{\mathrm{region}}^*=\frac{\sum_{g\in\text{region}}w(g)\frac1{1+\lambda E(g)\cdot s(g)}}{\sum_{g\in\text{region}}w(g)} Fregion∗=∑g∈regionw(g)∑g∈regionw(g)1+λE(g)⋅s(g)1
多无人机油污泄漏监测
系统以覆盖率、总飞行距离和漂移信息新鲜度(DIF)作为性能评估指标,其中覆盖率反映监测完整性,总飞行距离衡量执行成本,DIF强调对高不确定区域的及时重访以保证信息时效性。
3.多无人机监测框架
增量覆盖路径规划机制
为减少重复监测并提高资源利用效率,本文采用增量覆盖路径规划机制,在每个监测周期识别新增油污区域,并为这些增量区域生成专属覆盖路径。
设当前周期检测到的油污网格集合为 S t S_t St,上一周期为 S t − 1 S_{t-1} St−1,则新增区域定义为:
R n e w = S t ∖ S t − 1 R_{\mathrm{new}}=S_t\setminus S_{t-1} Rnew=St∖St−1
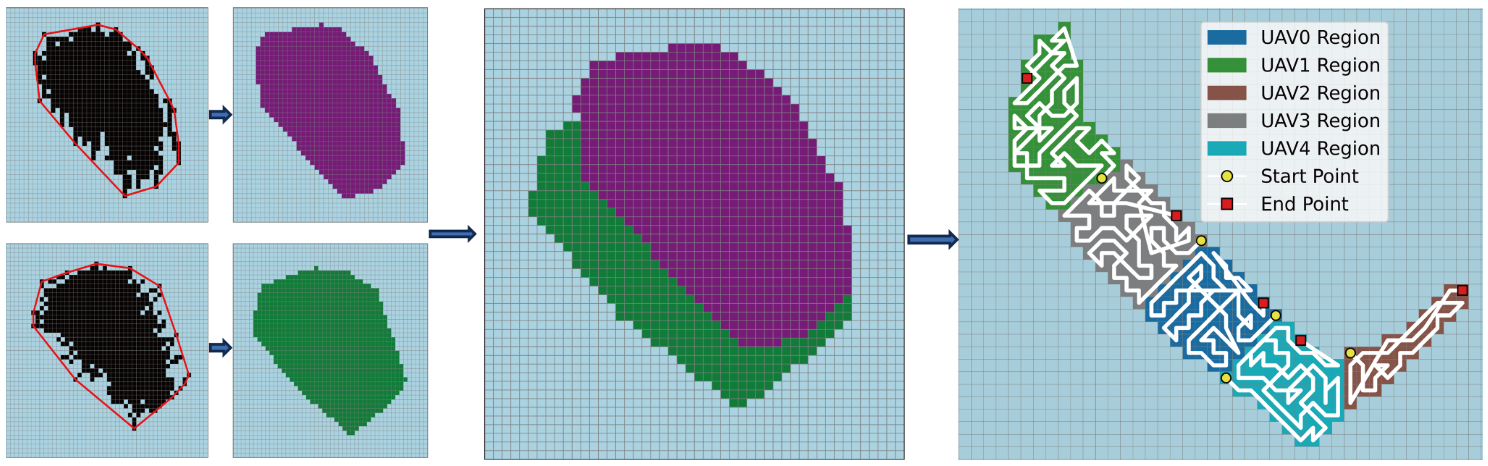
由于油污形态不规则且动态变化,分别对 S t S_t St与 S t − 1 S_{t-1} St−1构建凸包 C H t CH_t CHt与 C H t − 1 CH_{t-1} CHt−1。增量区域定义为位于当前
凸包内但不在上一周期凸包内的网格单元:
R n e w = { ( x , y ) ∣ ( x , y ) ∈ C H t , ( x , y ) ∉ C H t − 1 } R_{\mathrm{new}}=\{(x,y)\mid(x,y)\in CH_t,\:(x,y)\notin CH_{t-1}\} Rnew={(x,y)∣(x,y)∈CHt,(x,y)∈/CHt−1}
其中 ( x , y ) (x,y) (x,y)为网格中心坐标。该方法能够有效提取动态扩展区域,实现针对性监测。
区域划分
在提取增量区域后,采用基于熵加权的区域划分方法进行任务分配。通过对新增区域内网格赋予熵权重并进行加权聚类,使高不确定区域在划分中占据更重要地位,同时结合负载约束与空间连通性约束,对初始聚类结果进行调整,确保各子区域在规模上满足无人机续航限制、在空间上保持连续,从而实现均衡且可执行的任务分配。
基于熵的路径规划
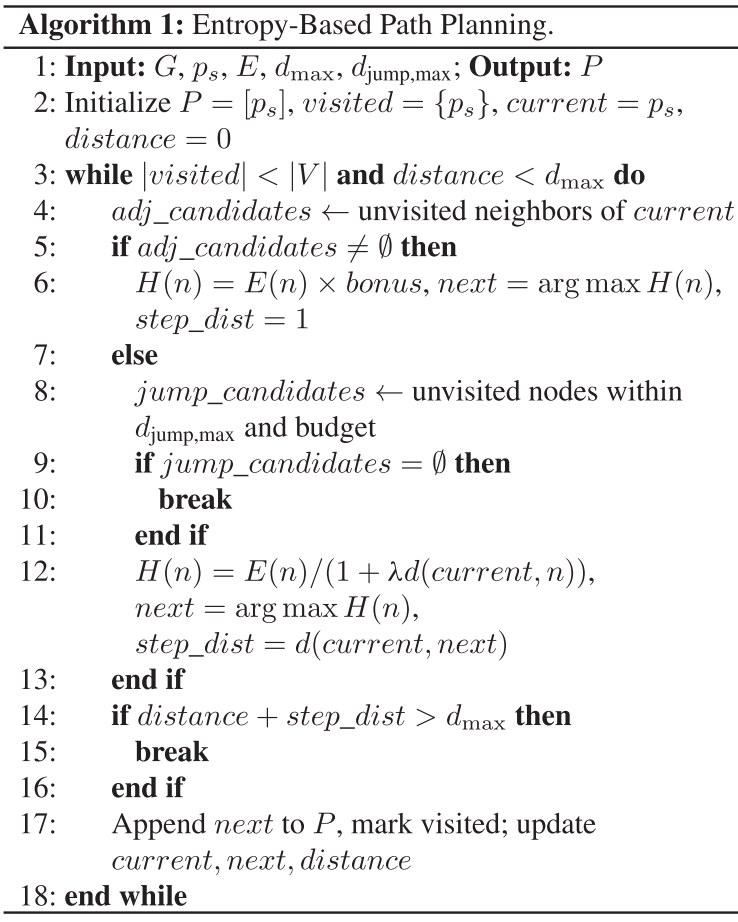
针对新增油污区域高度离散和破碎的问题,首先将所有新增网格构建为无向加权图 G G G ,节点权重由其熵值
E ( n ) E(n) E(n)决定,以体现监测优先级。为避免局部移动无法覆盖孤立区域,引入受约束的跳跃机制,在满足最大跳跃距离 d j u m p , m a x d_{jump,max} djump,max和剩余续航限制的前提下,允许无人机跳转至非邻接节点。
路径规划遵循优先局部、高熵优先、必要时跳跃的原则,并采用启发式评分函数:
H ( n ) = { E ( n ) ⋅ α , if n is adjacent E ( n ) 1 + λ ⋅ d ( c u r r e n t , n ) , if n is a jump candidate \begin{aligned}\\&H(n)=\begin{cases}E(n)\cdot\alpha,&\text{if }n\text{ is adjacent}\\\\\frac{E(n)}{1+\lambda\cdot d(current,n)},&\text{if }n\text{ is a jump candidate}&\end{cases}\end{aligned} H(n)=⎩ ⎨ ⎧E(n)⋅α,1+λ⋅d(current,n)E(n),if n is adjacentif n is a jump candidate
其中 E ( n ) E(n) E(n)为节点熵值, α \alpha α为邻接奖励系数,入为距离惩罚系数, d ( c u r r e n t , n ) d(current,n) d(current,n)为当前位置到候选节点的距离。
4.参考文献
1 Luo C, Wang L, Jin J, et al. Entropy-Based Incremental Coverage Path Planning for Multi-UAV Persistent MonitoringJ. IEEE Robotics and Automation Letters, 2025, 11(1): 378-385.
5.代码获取
xx
6.算法辅导·应用定制·读者交流
xx