12 矩阵形式、厄米共轭、表象变换
- [1 矩阵形式](#1 矩阵形式)
- [2 厄米共轭](#2 厄米共轭)
- [3 表象变换](#3 表象变换)
- 参考资料
1 矩阵形式
将一个算符作用在一个态矢上,得到一个新的态矢:
∣ f ′ ⟩ = Q ^ ∣ f ⟩ ∣ f ⟩ = f 1 ∣ e 1 ⟩ + f 2 ∣ e 2 ⟩ + ⋯ + f n ∣ e n ⟩ = ∑ n f n ∣ e n ⟩ |f'\rangle = \hat{Q}|f\rangle \\ |f\rangle = f_1 |e_1\rangle + f_2 |e_2\rangle + \dots + f_n |e_n\rangle = \sum_n f_n |e_n\rangle ∣f′⟩=Q^∣f⟩∣f⟩=f1∣e1⟩+f2∣e2⟩+⋯+fn∣en⟩=n∑fn∣en⟩
在矩阵形式表示中省略了基矢:
( f 1 ′ f 2 ′ ⋮ f n ′ ) = ( Q 11 Q 12 ... Q 1 n Q 21 Q 22 ... Q 2 n ⋮ ⋮ ⋱ ⋮ Q n 1 Q n 2 ... Q n n ) = ( f 1 f 2 ⋮ f n ) \begin{pmatrix} f_1' \\ f_2' \\ \vdots \\ f_n' \end{pmatrix}= \begin{pmatrix} Q_{11} & Q_{12} & \dots & Q_{1n} \\ Q_{21} & Q_{22} & \dots & Q_{2n} \\ \vdots & \vdots & \ddots & \vdots \\ Q_{n1} & Q_{n2} & \dots & Q_{nn} \end{pmatrix}= \begin{pmatrix} f_1 \\ f_2 \\ \vdots \\ f_n \end{pmatrix} f1′f2′⋮fn′ = Q11Q21⋮Qn1Q12Q22⋮Qn2......⋱...Q1nQ2n⋮Qnn = f1f2⋮fn
每一个矩阵元 Q m n Q_{mn} Qmn 告诉我们:新矢量中的第 m m m 个分量包含旧矢量中第 n n n 个分量的多少,即展开系数。比如
f 1 ′ = Q 11 f 1 + Q 12 f 2 + ... f_1' = Q_{11} f_1 + Q_{12} f_2 + \dots f1′=Q11f1+Q12f2+...
Q 12 Q_{12} Q12 表示新矢量中的第 1 1 1 个分量 f 1 ′ f_1' f1′ 包含旧矢量中第 2 2 2 个分量 f 2 f_2 f2 的多少,或者说权重。
因此矩阵元
Q m n = ⟨ e m ∣ Q ^ ∣ e n ⟩ 纯粹好看,就是 ⟨ e m ∣ Q ^ e n ⟩ Q_{mn} = \langle e_m | \hat{Q} | e_n \rangle \quad \text{纯粹好看,就是} \langle e_m | \hat{Q} e_n \rangle Qmn=⟨em∣Q^∣en⟩纯粹好看,就是⟨em∣Q^en⟩
例题
(来自《量子力学概论》格里菲斯 例3.8)
假定一个体系仅有两个线性独立的态:
∣ 1 ⟩ = ( 1 0 ) 和 ∣ 2 ⟩ = ( 0 1 ) . |1\rangle = \begin{pmatrix} 1 \\ 0 \end{pmatrix} \quad \text{和} \quad |2\rangle = \begin{pmatrix} 0 \\ 1 \end{pmatrix}. ∣1⟩=(10)和∣2⟩=(01).
最一般的态是它们归一化的线性叠加:
∣ J ( t ) ⟩ = a ∣ 1 ⟩ + b ∣ 2 ⟩ = ( a b ) , |\mathfrak{J}(t)\rangle = a|1\rangle + b|2\rangle = \begin{pmatrix} a \\ b \end{pmatrix}, ∣J(t)⟩=a∣1⟩+b∣2⟩=(ab),
并且有 ∣ a ∣ 2 + ∣ b ∣ 2 = 1 |a|^2 + |b|^2 = 1 ∣a∣2+∣b∣2=1。
哈密顿算符可以表示为一个(厄密)矩阵;假定它有特定的形式:
H = ( h g g h ) , H = \begin{pmatrix} h & g \\ g & h \end{pmatrix}, H=(hggh),
这里 g g g 和 h h h 都是实常数。如果体系的初始态是 ∣ 1 ⟩ |1\rangle ∣1⟩(在 t = 0 t=0 t=0 时刻),那么在 t t t 时刻它的状态是什么?
解 :
H ^ ∣ ψ n ⟩ = E ∣ ψ n ⟩ ( h g g h ) ( a b ) = E ( a b ) = ( E 0 0 E ) ( a b ) ( h − E g g h − E ) ( a b ) = 0 , det ∣ h − E g g h − E ∣ = 0 ⇒ ( h − E ) 2 − g 2 = 0. \begin{aligned} \hat{H} |\psi_n\rangle &= E |\psi_n\rangle \\ \begin{pmatrix} h & g \\ g & h \end{pmatrix} \begin{pmatrix} a \\ b \end{pmatrix} &= E \begin{pmatrix} a \\ b \end{pmatrix} = \begin{pmatrix} E & 0 \\ 0 & E \end{pmatrix} \begin{pmatrix} a \\ b \end{pmatrix} \\ \begin{pmatrix} h-E & g \\ g & h-E \end{pmatrix} \begin{pmatrix} a \\ b \end{pmatrix} &= 0, \\ \det \begin{vmatrix} h-E & g \\ g & h-E \end{vmatrix} &= 0 \quad \Rightarrow \quad (h-E)^2 - g^2 = 0. \end{aligned} H^∣ψn⟩(hggh)(ab)(h−Eggh−E)(ab)det h−Eggh−E =E∣ψn⟩=E(ab)=(E00E)(ab)=0,=0⇒(h−E)2−g2=0.
E 1 = h + g , E 2 = h − g E_1 = h + g, \quad E_2 = h - g E1=h+g,E2=h−g
当 E 1 = h + g E_1 = h+g E1=h+g 时,
( h g g h ) ( a b ) = ( h + g ) ( a b ) \begin{pmatrix} h & g \\ g & h \end{pmatrix} \begin{pmatrix} a \\ b \end{pmatrix} = (h+g) \begin{pmatrix} a \\ b \end{pmatrix} (hggh)(ab)=(h+g)(ab)
( h a + g b g a + h b ) = ( ( h + g ) a ( h + g ) b ) \begin{pmatrix} ha + gb \\ ga + hb \end{pmatrix} = \begin{pmatrix} (h+g)a \\ (h+g)b \end{pmatrix} (ha+gbga+hb)=((h+g)a(h+g)b)
⇒ { a = b a = b \Rightarrow \begin{cases} a = b \\ a = b \end{cases} ⇒{a=ba=b
取能归一化的本征态
⇒ ( 1 1 ) ⇒ ∣ ψ 1 ⟩ = 1 2 ( 1 1 ) \Rightarrow \begin{pmatrix} 1 \\ 1 \end{pmatrix} \Rightarrow |\psi_1\rangle = \frac{1}{\sqrt{2}} \begin{pmatrix} 1 \\ 1 \end{pmatrix} ⇒(11)⇒∣ψ1⟩=2 1(11)
同理可得,当 E 2 = h − g E_2 = h - g E2=h−g 时,
∣ ψ 2 ⟩ = 1 2 ( 1 − 1 ) \quad |\psi_2\rangle = \frac{1}{\sqrt{2}} \begin{pmatrix} 1 \\ -1 \end{pmatrix} ∣ψ2⟩=2 1(1−1)
那么,初态为 ∣ 1 ⟩ |1\rangle ∣1⟩:
∣ f ( 0 ) ⟩ = ( 1 0 ) = c 1 ψ 1 + c 2 ψ 2 = c 1 1 2 ( 1 1 ) + c 2 1 2 ( 1 − 1 ) |f(0)\rangle=\begin{pmatrix} 1 \\ 0 \end{pmatrix} = c_1 \psi_1+c_2 \psi_2= c_1 \frac{1}{\sqrt{2}} \begin{pmatrix} 1 \\ 1 \end{pmatrix} + c_2 \frac{1}{\sqrt{2}} \begin{pmatrix} 1 \\ -1 \end{pmatrix} ∣f(0)⟩=(10)=c1ψ1+c2ψ2=c12 1(11)+c22 1(1−1)
解得 c_1 = c_2 = \\frac{1}{\\sqrt{2}} ,因此:
( 1 0 ) = 1 2 ( ∣ ψ 1 ⟩ + ∣ ψ 2 ⟩ ) \begin{pmatrix} 1 \\ 0 \end{pmatrix} = \frac{1}{\sqrt{2}} \left( |\psi_1\rangle + |\psi_2\rangle \right) (10)=2 1(∣ψ1⟩+∣ψ2⟩)
最后,我们加进标准的时间因子 e − i E n t / ℏ e^{-iE_n t/\hbar} e−iEnt/ℏ
∣ f ( t ) ⟩ = 1 2 ( ∣ ψ 1 ⟩ e − i E 1 t / ℏ + ∣ ψ 2 ⟩ e − i E 2 t / ℏ ) = 1 2 ( 1 2 ( 1 1 ) e − i ( h + g ) t / ℏ + 1 2 ( 1 − 1 ) e − i ( h − g ) t / ℏ ) = 1 2 e − i h t / ℏ ( e − i g t / ℏ e − i g t / ℏ ) + ( e i g t / ℏ − e i g t / ℏ ) = e − i h t / ℏ ( cos ( g t ℏ ) i sin ( g t ℏ ) ) \begin{aligned} |f(t)\rangle &= \frac{1}{\sqrt{2}} \left( |\psi_1\rangle e^{-iE_1 t/\hbar} + |\psi_2\rangle e^{-iE_2 t/\hbar} \right) \\ &= \frac{1}{\sqrt{2}} \left( \frac{1}{\sqrt{2}} \begin{pmatrix} 1 \\ 1 \end{pmatrix} e^{-i(h+g)t/\hbar} + \frac{1}{\sqrt{2}} \begin{pmatrix} 1 \\ -1 \end{pmatrix} e^{-i(h-g)t/\hbar} \right) \\ &= \frac{1}{2} e^{-iht/\hbar} \left \\begin{pmatrix} e\^{-igt/\\hbar} \\\\ e\^{-igt/\\hbar} \\end{pmatrix} + \\begin{pmatrix} e\^{igt/\\hbar} \\\\ -e\^{igt/\\hbar} \\end{pmatrix} \\right \\ &= e^{-iht/\hbar} \begin{pmatrix} \cos\left(\frac{gt}{\hbar}\right) \\ i\sin\left(\frac{gt}{\hbar}\right) \end{pmatrix} \end{aligned} ∣f(t)⟩=2 1(∣ψ1⟩e−iE1t/ℏ+∣ψ2⟩e−iE2t/ℏ)=2 1(2 1(11)e−i(h+g)t/ℏ+2 1(1−1)e−i(h−g)t/ℏ)=21e−iht/ℏ(e−igt/ℏe−igt/ℏ)+(eigt/ℏ−eigt/ℏ)=e−iht/ℏ(cos(ℏgt)isin(ℏgt))
此处用到了欧拉公式,再补充下:
欧拉公式指出: e i θ = cos θ + i sin θ e^{i\theta} = \cos\theta + i\sin\theta eiθ=cosθ+isinθ
由此可以衍生出: cos θ = e i θ + e − i θ 2 \cos\theta = \frac{e^{i\theta} + e^{-i\theta}}{2} cosθ=2eiθ+e−iθ
i sin θ = e i θ − e − i θ 2 i\sin\theta = \frac{e^{i\theta} - e^{-i\theta}}{2} isinθ=2eiθ−e−iθ
2 厄米共轭
转置
规则: 行变列,列变行。符号是 T ^T T。
假设矩阵为: M = ( a b c d e f ) M = \begin{pmatrix} a & b & c \\ d & e & f \end{pmatrix} M=(adbecf)
其转置后,原先的 2 × 3 2 \times 3 2×3 矩阵变为 3 × 2 3 \times 2 3×2。 M T = ( a d b e c f ) M^T = \begin{pmatrix} a & d \\ b & e \\ c & f \end{pmatrix} MT= abcdef
复共轭
规则:将复数的虚部变号 ( i → − i i \to -i i→−i),符号是 ∗ ^* ∗。
若是矩阵则将其里面每个元素进行都进行改变:
M ∗ = ( a ∗ b ∗ c ∗ d ∗ e ∗ f ∗ ) M^* = \begin{pmatrix} a^* & b^* & c^* \\ d^* & e^* & f^* \end{pmatrix} M∗=(a∗d∗b∗e∗c∗f∗)
厄米共轭
规则:先转置,再取共轭(或反之),符号为 † ^\dagger †。
M † = ( M T ) ∗ = ( a ∗ d ∗ b ∗ e ∗ c ∗ f ∗ ) M^\dagger = (M^T)^* = \begin{pmatrix} a^* & d^* \\ b^* & e^* \\ c^* & f^* \end{pmatrix} M†=(MT)∗= a∗b∗c∗d∗e∗f∗
性质总结
-
右矢 ∣ f ⟩ = ( f 1 f 2 ⋮ f n ) |f\rangle = \begin{pmatrix} f_1 \\ f_2 \\ \vdots \\ f_n \end{pmatrix} ∣f⟩= f1f2⋮fn ,则它对应左矢为:
⟨ f ∣ = ( f 1 ∗ f 2 ∗ ⋯ f n ∗ ) \langle f| = \left( f_1^* \quad f_2^* \quad \cdots \quad f_n^* \right) ⟨f∣=(f1∗f2∗⋯fn∗)。注意这里进行了厄米共轭转换,即转置后取复共轭。 -
内积 ⟨ α ∣ β ⟩ \langle\alpha|\beta\rangle ⟨α∣β⟩ 是右矢在左矢上投影的大小,是标量;
-
而 ∣ α ⟩ ⟨ β ∣ |\alpha\rangle\langle\beta| ∣α⟩⟨β∣ 是一个算符。将 ∣ α ⟩ ⟨ α ∣ |\alpha\rangle\langle\alpha| ∣α⟩⟨α∣ 称为投影算符。
-
对一组分立正交归一基矢 ∣ e n ⟩ |e_n\rangle ∣en⟩,有
∑ n ∣ e n ⟩ ⟨ e n ∣ = I 为单位矩阵 \sum_n |e_n\rangle\langle e_n| = \mathrm{I} \quad \text{为单位矩阵} n∑∣en⟩⟨en∣=I为单位矩阵证明:
∑ n ∣ e n ⟩ ⟨ e n ∣ ψ ⟩ = c 1 ∣ e 1 ⟩ + c 2 ∣ e 2 ⟩ + ⋯ + c n ∣ e n ⟩ = ∑ n c n ∣ e n ⟩ = ∣ ψ ⟩ \begin{aligned} \sum_n |e_n\rangle\langle e_n|\psi\rangle &= c_1|e_1\rangle + c_2|e_2\rangle + \dots + c_n|e_n\rangle \\ &= \sum_n c_n|e_n\rangle = |\psi\rangle \end{aligned} n∑∣en⟩⟨en∣ψ⟩=c1∣e1⟩+c2∣e2⟩+⋯+cn∣en⟩=n∑cn∣en⟩=∣ψ⟩ -
对连续基矢则有
∫ ∣ e z ⟩ ⟨ e z ∣ d z = 1 \int |e_z\rangle\langle e_z| dz= 1 ∫∣ez⟩⟨ez∣dz=1
3 表象变换
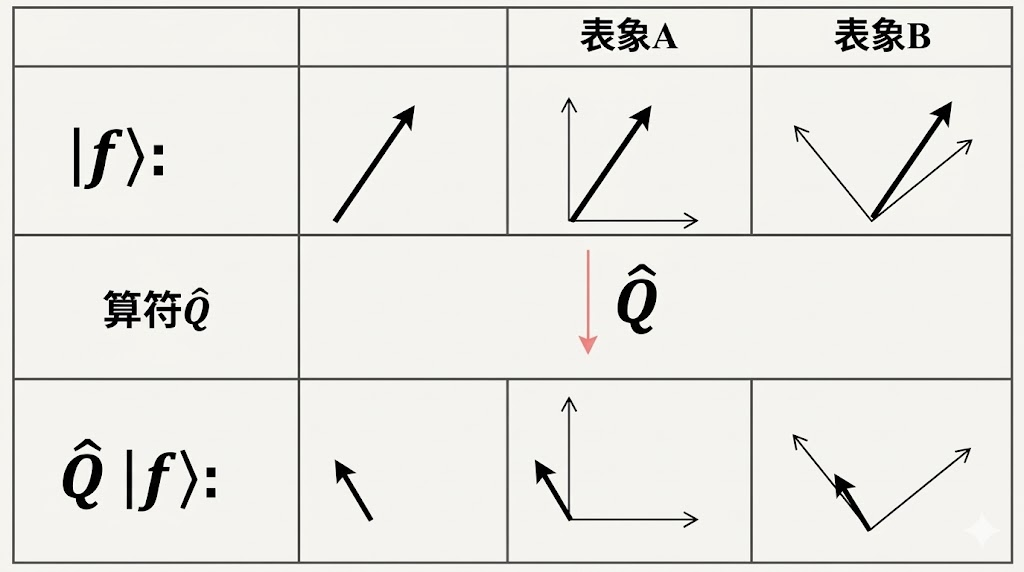
一个矢量各分量( f 1 , f 2 , f 3 , ... f_1, f_2, f_3, \dots f1,f2,f3,...)的具体取值取决于基矢(坐标轴)------即表象的选取,一个算符的矩阵元理应也如此。
如下图所示,态矢 ∣ f ⟩ |f\rangle ∣f⟩ 在不同表象下(即基矢不同),系数不同。经过算符 Q ^ \hat Q Q^ 操作后也有不同的系数。
幺正变换
将表象A中的具体形式变换成表象B中的形式,也是一个线性变换,这种变换叫作幺正(unitary)变换 ,满足条件:
U ^ † = U ^ − 1 \hat{U}^\dagger = \hat{U}^{-1} U^†=U^−1
(矩阵的逆比较难解出来,但矩阵的厄米共轭容易)。
幺正变换并不改变态矢量和算符本身,改变的只是它们的形式。
f ⃗ B = U ^ + f ⃗ A \vec{f}_B = \hat{U}^+ \vec{f}_A f B=U^+f A
例题:单电子的自旋角动量三分量算符,在 S z S_z Sz表象下分别为:
S ^ x = ℏ 2 ( 0 1 1 0 ) , S ^ y = ℏ 2 ( 0 − i i 0 ) , S ^ z = ℏ 2 ( 1 0 0 − 1 ) . \hat{S}_x = \frac{\hbar}{2}\begin{pmatrix} 0 & 1 \\ 1 & 0 \end{pmatrix}, \quad \hat{S}_y = \frac{\hbar}{2}\begin{pmatrix} 0 & -i \\ i & 0 \end{pmatrix}, \quad \hat{S}_z = \frac{\hbar}{2}\begin{pmatrix} 1 & 0 \\ 0 & -1 \end{pmatrix}. S^x=2ℏ(0110),S^y=2ℏ(0i−i0),S^z=2ℏ(100−1).
分别求解它们在 S z S_z Sz表象下的本征矢与本征值。求解它们在 S x S_x Sx表象下的矩阵形式和本征态。
解:
先看 S ^ z \hat{S}_z S^z 在 S z S_z Sz表象下的本征方程:
S ^ z ( a b ) = S z ( a b ) \hat{S}_z \begin{pmatrix} a \\ b \end{pmatrix} = S_z\begin{pmatrix} a \\ b \end{pmatrix} S^z(ab)=Sz(ab)
其中 S z S_z Sz 是本征值。代入 S ^ z \hat{S}_z S^z得:
ℏ 2 ( 1 0 0 − 1 ) ( a b ) = S z ( a b ) = ( S z 0 0 S z ) ( a b ) \frac{\hbar}{2}\begin{pmatrix} 1 & 0 \\ 0 & -1 \end{pmatrix}\begin{pmatrix} a \\ b \end{pmatrix} = S_z \begin{pmatrix} a \\ b \end{pmatrix} = \begin{pmatrix} S_z & 0 \\ 0 & S_z \end{pmatrix}\begin{pmatrix} a \\ b \end{pmatrix} 2ℏ(100−1)(ab)=Sz(ab)=(Sz00Sz)(ab)
移到左边:
( ℏ 2 − S z 0 0 − ℏ 2 − S z ) ( a b ) = 0 \begin{pmatrix} \frac{\hbar}{2} - S_z & 0 \\ 0 & -\frac{\hbar}{2} - S_z \end{pmatrix}\begin{pmatrix} a \\ b \end{pmatrix} = 0 (2ℏ−Sz00−2ℏ−Sz)(ab)=0
本征态矢不能为 0,那么只能是左侧的行列式为 0:
D e t ( ℏ 2 − S z 0 0 − ℏ 2 − S z ) = ( ℏ 2 − S z ) ( − ℏ 2 − S z ) − 0 = 0 Det\begin{pmatrix} \frac{\hbar}{2} - S_z & 0 \\ 0 & -\frac{\hbar}{2} - S_z \end{pmatrix}= \left(\frac{\hbar}{2} - S_z\right)\left(-\frac{\hbar}{2} - S_z\right) - 0 = 0 Det(2ℏ−Sz00−2ℏ−Sz)=(2ℏ−Sz)(−2ℏ−Sz)−0=0
S z = ± ℏ 2 S_z = \pm \frac{\hbar}{2} Sz=±2ℏ
有一个性质:如果算符在自身表象下是对角矩阵,每一个对角元都是本征值。
① 当 S z = + ℏ 2 S_z = +\dfrac{\hbar}{2} Sz=+2ℏ 时:
ℏ 2 ( 1 0 0 − 1 ) ( a b ) = + ℏ 2 ( a b ) ℏ 2 ( a − b ) = ℏ 2 ( a b ) ⇒ { a = a − b = b ⇒ ( a b ) = ( 1 0 ) \begin{aligned} \frac{\hbar}{2}\begin{pmatrix} 1 & 0 \\ 0 & -1 \end{pmatrix}\begin{pmatrix} a \\ b \end{pmatrix} &= +\frac{\hbar}{2}\begin{pmatrix} a \\ b \end{pmatrix} \\ \frac{\hbar}{2}\begin{pmatrix} a \\ -b \end{pmatrix} &= \frac{\hbar}{2}\begin{pmatrix} a \\ b \end{pmatrix} \\ \Rightarrow \begin{cases} a = a \\ -b = b \end{cases} &\Rightarrow \begin{pmatrix} a \\ b \end{pmatrix} = \begin{pmatrix} 1 \\ 0 \end{pmatrix} \end{aligned} 2ℏ(100−1)(ab)2ℏ(a−b)⇒{a=a−b=b=+2ℏ(ab)=2ℏ(ab)⇒(ab)=(10)
② 当 S z = − ℏ 2 S_z = -\dfrac{\hbar}{2} Sz=−2ℏ 时:
ℏ 2 ( 1 0 0 − 1 ) ( a b ) = − ℏ 2 ( a b ) ⇒ { a = − a − b = − b ⇒ ( a b ) = ( 0 1 ) \begin{aligned} \frac{\hbar}{2}\begin{pmatrix} 1 & 0 \\ 0 & -1 \end{pmatrix}\begin{pmatrix} a \\ b \end{pmatrix} &= -\frac{\hbar}{2}\begin{pmatrix} a \\ b \end{pmatrix} \\ \Rightarrow \begin{cases} a = -a \\ -b = -b \end{cases} &\Rightarrow \begin{pmatrix} a \\ b \end{pmatrix} = \begin{pmatrix} 0 \\ 1 \end{pmatrix} \end{aligned} 2ℏ(100−1)(ab)⇒{a=−a−b=−b=−2ℏ(ab)⇒(ab)=(01)
可以看出来,对角矩阵中,每一个对角元本征值对应的本征态,对角元所在行的值为1,其他行的值为0;
同样的方法求 S ^ x \hat{S}_x S^x在 S z S_z Sz表象下的的本征值和本征态:
ℏ 2 ( 0 1 1 0 ) ( a b ) = S x ( a b ) ∣ 0 − S x ℏ 2 ℏ 2 0 − S x ∣ = 0 , S x 2 − ℏ 2 4 = 0 ⇒ S x = ± ℏ 2 . \begin{aligned} \frac{\hbar}{2}\begin{pmatrix} 0 & 1 \\ 1 & 0 \end{pmatrix}\begin{pmatrix} a \\ b \end{pmatrix} &= S_x \begin{pmatrix} a \\ b \end{pmatrix} \\ \begin{vmatrix} 0 - S_x & \frac{\hbar}{2} \\ \frac{\hbar}{2} & 0 - S_x \end{vmatrix} &= 0, \\ S_x^2 - \frac{\hbar^2}{4} &= 0 \quad \Rightarrow \quad S_x = \pm \frac{\hbar}{2}. \end{aligned} 2ℏ(0110)(ab) 0−Sx2ℏ2ℏ0−Sx Sx2−4ℏ2=Sx(ab)=0,=0⇒Sx=±2ℏ.
① 当 S x = ℏ 2 S_x = \dfrac{\hbar}{2} Sx=2ℏ 时:
ℏ 2 ( 0 1 1 0 ) ( a b ) = ℏ 2 ( a b ) ( b a ) = ( a b ) ( a b ) = 1 2 ( 1 1 ) . \begin{aligned} \frac{\hbar}{2}\begin{pmatrix} 0 & 1 \\ 1 & 0 \end{pmatrix}\begin{pmatrix} a \\ b \end{pmatrix} &= \frac{\hbar}{2}\begin{pmatrix} a \\ b \end{pmatrix} \\ \begin{pmatrix} b \\ a \end{pmatrix} &= \begin{pmatrix} a \\ b \end{pmatrix} \\ \begin{pmatrix} a \\ b \end{pmatrix} &= \frac{1}{\sqrt{2}}\begin{pmatrix} 1 \\ 1 \end{pmatrix}. \end{aligned} 2ℏ(0110)(ab)(ba)(ab)=2ℏ(ab)=(ab)=2 1(11).
② 当 S x = − ℏ 2 S_x = -\dfrac{\hbar}{2} Sx=−2ℏ 时:
ℏ 2 ( 0 1 1 0 ) ( a b ) = − ℏ 2 ( a b ) ( b a ) = − ( a b ) ( a b ) = 1 2 ( 1 − 1 ) . \begin{aligned} \frac{\hbar}{2}\begin{pmatrix} 0 & 1 \\ 1 & 0 \end{pmatrix}\begin{pmatrix} a \\ b \end{pmatrix} &= -\frac{\hbar}{2}\begin{pmatrix} a \\ b \end{pmatrix} \\ \begin{pmatrix} b \\ a \end{pmatrix} &= -\begin{pmatrix} a \\ b \end{pmatrix} \\ \begin{pmatrix} a \\ b \end{pmatrix} &= \frac{1}{\sqrt{2}}\begin{pmatrix} 1 \\ -1 \end{pmatrix}. \end{aligned} 2ℏ(0110)(ab)(ba)(ab)=−2ℏ(ab)=−(ab)=2 1(1−1).
S ^ y \hat{S}_y S^y在 S z S_z Sz表象下的的本征值和本征态:
∣ − S y − i ℏ 2 i ℏ 2 − S y ∣ = 0 ⇒ S y 2 − ℏ 2 4 = 0 ⇒ S y = ± ℏ 2 . \begin{vmatrix} -S_y & -i\frac{\hbar}{2} \\ i\frac{\hbar}{2} & -S_y \end{vmatrix} = 0 \quad\Rightarrow\quad S_y^2 - \frac{\hbar^2}{4} = 0 \quad\Rightarrow\quad S_y = \pm \frac{\hbar}{2}. −Syi2ℏ−i2ℏ−Sy =0⇒Sy2−4ℏ2=0⇒Sy=±2ℏ.
① 当 S y = ℏ 2 S_y = \dfrac{\hbar}{2} Sy=2ℏ 时:
ℏ 2 ( 0 − i i 0 ) ( a b ) = ℏ 2 ( a b ) ( − i b i a ) = ( a b ) ( a b ) = 1 2 ( 1 i ) . \begin{aligned} \frac{\hbar}{2}\begin{pmatrix} 0 & -i \\ i & 0 \end{pmatrix}\begin{pmatrix} a \\ b \end{pmatrix} &= \frac{\hbar}{2}\begin{pmatrix} a \\ b \end{pmatrix} \\ \begin{pmatrix} -ib \\ ia \end{pmatrix} &= \begin{pmatrix} a \\ b \end{pmatrix} \\ \begin{pmatrix} a \\ b \end{pmatrix} &= \frac{1}{\sqrt{2}}\begin{pmatrix} 1 \\ i \end{pmatrix}. \end{aligned} 2ℏ(0i−i0)(ab)(−ibia)(ab)=2ℏ(ab)=(ab)=2 1(1i).
② 当 S y = − ℏ 2 S_y = -\dfrac{\hbar}{2} Sy=−2ℏ 时:
ℏ 2 ( 0 − i i 0 ) ( a b ) = − ℏ 2 ( a b ) { − i b = − a i a = − b ⇒ ( a b ) = 1 2 ( 1 − i ) . \begin{aligned} \frac{\hbar}{2}\begin{pmatrix} 0 & -i \\ i & 0 \end{pmatrix}\begin{pmatrix} a \\ b \end{pmatrix} &= -\frac{\hbar}{2}\begin{pmatrix} a \\ b \end{pmatrix} \\ \begin{cases} -ib = -a \\ ia = -b \end{cases} \quad\Rightarrow\quad \begin{pmatrix} a \\ b \end{pmatrix} &= \frac{1}{\sqrt{2}}\begin{pmatrix} 1 \\ -i \end{pmatrix}. \end{aligned} 2ℏ(0i−i0)(ab){−ib=−aia=−b⇒(ab)=−2ℏ(ab)=2 1(1−i).
接下来,我们求解它们在 S x S_x Sx表象下的矩阵形式和本征态。
本征值不会随着表象变化而变化,所以跟上面是一样的。
那么 U ^ \hat{U} U^ 的具体形式是什么样的呢?
我们先来看 S ^ z \hat{S}_z S^z,应该是 S ^ x \hat{S}_x S^x在表象 S z S_z Sz下的本征态的排列:
1 2 ( 1 1 ) , 1 2 ( 1 − 1 ) \frac{1}{\sqrt{2}}\begin{pmatrix} 1 \\ 1 \end{pmatrix}, \quad \frac{1}{\sqrt{2}}\begin{pmatrix} 1 \\ -1 \end{pmatrix} 2 1(11),2 1(1−1)
U ^ = ( 1 2 1 2 1 2 − 1 2 ) = 1 2 ( 1 1 1 − 1 ) \hat U = \begin{pmatrix} \frac{1}{\sqrt{2}} & \frac{1}{\sqrt{2}} \\ \frac{1}{\sqrt{2}} & -\frac{1}{\sqrt{2}} \end{pmatrix} = \frac{1}{\sqrt{2}} \begin{pmatrix} 1 & 1 \\ 1 & -1 \end{pmatrix} U^=(2 12 12 1−2 1)=2 1(111−1)
转换公式为:
S ^ z 新 = U ^ † S ^ z 旧 U ^ = 1 2 ( 1 1 1 − 1 ) ⋅ ℏ 2 ( 1 0 0 − 1 ) ⋅ 1 2 ( 1 1 1 − 1 ) = ℏ 4 ( 1 1 1 − 1 ) ( 1 1 − 1 1 ) = ℏ 4 ( 0 2 2 0 ) = ℏ 2 ( 0 1 1 0 ) \begin{aligned} \hat{S}{z新} &= \hat{U}^\dagger \hat{S}{z旧} \hat{U} \\ &= \frac{1}{\sqrt{2}}\begin{pmatrix} 1 & 1 \\ 1 & -1 \end{pmatrix} \cdot \frac{\hbar}{2}\begin{pmatrix} 1 & 0 \\ 0 & -1 \end{pmatrix} \cdot \frac{1}{\sqrt{2}}\begin{pmatrix} 1 & 1 \\ 1 & -1 \end{pmatrix} \\ &= \frac{\hbar}{4} \begin{pmatrix} 1 & 1 \\ 1 & -1 \end{pmatrix} \begin{pmatrix} 1 & 1 \\ -1 & 1 \end{pmatrix} \\ &= \frac{\hbar}{4} \begin{pmatrix} 0 & 2 \\ 2 & 0 \end{pmatrix} \\ &= \frac{\hbar}{2}\begin{pmatrix} 0 & 1 \\ 1 & 0 \end{pmatrix} \end{aligned} S^z新=U^†S^z旧U^=2 1(111−1)⋅2ℏ(100−1)⋅2 1(111−1)=4ℏ(111−1)(1−111)=4ℏ(0220)=2ℏ(0110)
接下来还要求新的本征态:
ℏ 2 : ( a b ) 新 = U + ( 1 0 ) = 1 2 ( 1 1 1 − 1 ) ( 1 0 ) = 1 2 ( 1 1 ) − ℏ 2 : ( a b ) 新 = U + ( 0 1 ) = 1 2 ( 1 1 1 − 1 ) ( 0 1 ) = 1 2 ( 1 − 1 ) \begin{aligned} \frac{\hbar}{2}: \quad \begin{pmatrix} a \\ b \end{pmatrix}{\text{新}} &= U^+ \begin{pmatrix} 1 \\ 0 \end{pmatrix} = \frac{1}{\sqrt{2}}\begin{pmatrix} 1 & 1 \\ 1 & -1 \end{pmatrix}\begin{pmatrix} 1 \\ 0 \end{pmatrix} = \frac{1}{\sqrt{2}}\begin{pmatrix} 1 \\ 1 \end{pmatrix} \\ -\frac{\hbar}{2}: \quad \begin{pmatrix} a \\ b \end{pmatrix}{\text{新}} &= U^+ \begin{pmatrix} 0 \\ 1 \end{pmatrix} = \frac{1}{\sqrt{2}}\begin{pmatrix} 1 & 1 \\ 1 & -1 \end{pmatrix}\begin{pmatrix} 0 \\ 1 \end{pmatrix} = \frac{1}{\sqrt{2}}\begin{pmatrix} 1 \\ -1 \end{pmatrix} \end{aligned} 2ℏ:(ab)新−2ℏ:(ab)新=U+(10)=2 1(111−1)(10)=2 1(11)=U+(01)=2 1(111−1)(01)=2 1(1−1)
一些结论
力学量在自身表象下 ↔ \leftrightarrow ↔ 力学量算符是对角矩阵时:
- 对角元为本征值。第m个对角元所对应的本征矢为
( 0 ⋮ 1 ⋮ 0 ) ← 第m个分量 \begin{pmatrix} 0 \\ \vdots \\ 1 \\ \vdots \\ 0 \end{pmatrix} \quad \leftarrow \quad \text{第m个分量} 0⋮1⋮0 ←第m个分量 - 幺正变换不改变矩阵的迹( Tr ( A ) \text{Tr}(\text{A}) Tr(A))------对角元之和(本征值之和,因为本征值不随幺正变换而变化)。
参考资料
- 【兰兰的不自量力】量子力学考研教学视频12:矩阵形式、表象变换
- 《量子力学概论》格里菲斯