OpenCV 作为计算机视觉领域最经典的开源库之一,其形态学操作和边缘检测是处理图像的基础且核心的技能。本文将结合实战代码,深入浅出地讲解 OpenCV 中形态学操作(腐蚀、膨胀、开运算、闭运算等)和边缘检测(Sobel、Scharr、Laplacian、Canny)的原理与实现,帮助初学者快速上手。
一、OpenCV 形态学操作:图像的 "塑形" 魔法
形态学操作基于图像的形状进行处理,核心是通过结构元素(kernel)对图像像素进行遍历和运算,主要用于图像的降噪、轮廓提取、特征增强等场景。
1. 腐蚀(Erosion):让图像 "收缩"
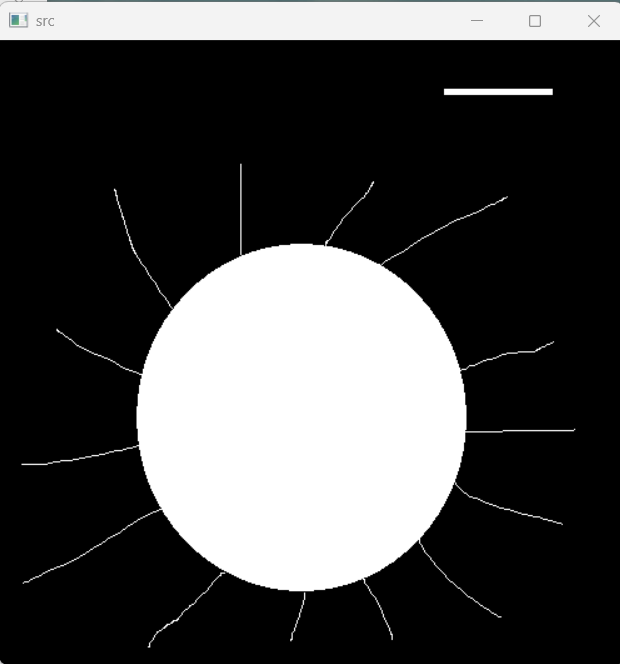
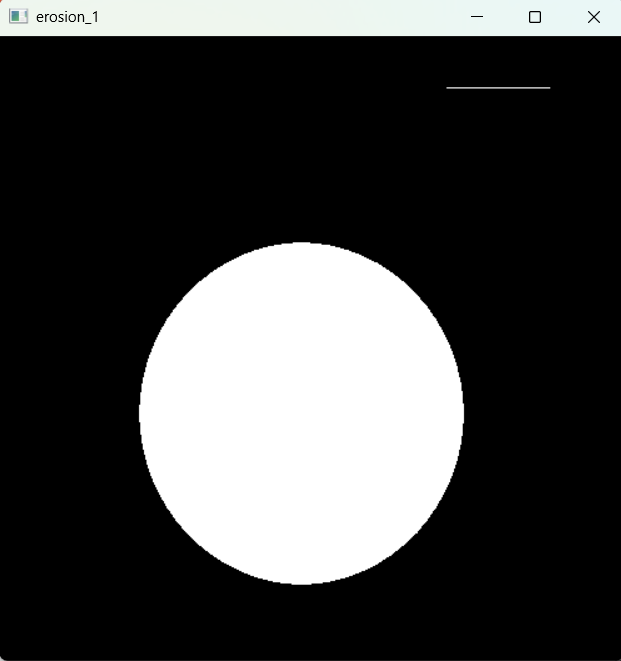
腐蚀操作的原理是:用结构元素遍历图像的每个像素,只有当结构元素覆盖的所有像素都是前景(白色)时,中心像素才会保留为前景,否则变为背景(黑色)。效果是让图像的前景区域 "收缩",可以消除小的亮斑、细化轮廓。
python
import cv2
import numpy as np
# 读取图像(OpenCV默认读取格式为BGR)
sun = cv2.imread('sun.png')
cv2.imshow('src', sun)
cv2.waitKey(0)
# 定义3x3的结构元素(全1矩阵)
kernel = np.ones((3, 3), np.uint8)
# 执行腐蚀操作,迭代2次
erosion_1 = cv2.erode(sun, kernel, iterations=2)
cv2.imshow('erosion_1', erosion_1)
cv2.waitKey(0)运行结果:
原图
腐蚀后的
2. 膨胀(Dilation):让图像 "扩张"
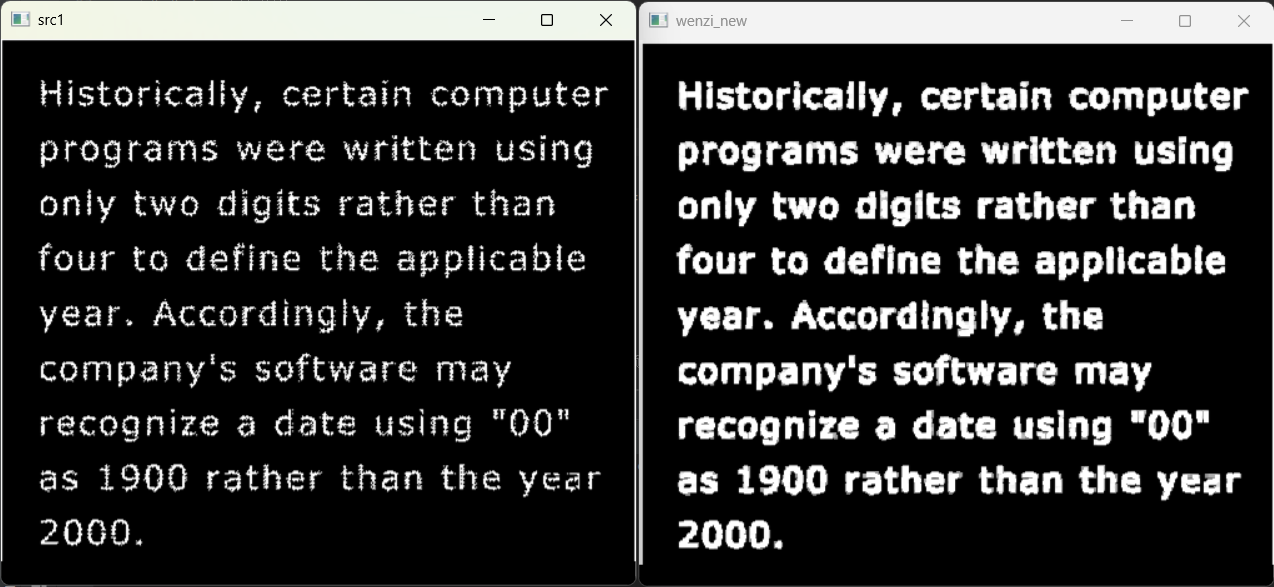
膨胀是腐蚀的逆操作:用结构元素遍历图像,只要结构元素覆盖的区域有一个像素是前景,中心像素就变为前景。效果是让前景区域 "扩张",可以填补前景中的小空洞、增强轮廓。
python
wenzi = cv2.imread('wenzi.png')
cv2.imshow('src1', wenzi)
cv2.waitKey(0)
kernel = np.ones((2, 2), np.uint8)
# 执行膨胀操作,迭代2次
wenzi_new = cv2.dilate(wenzi, kernel, iterations=2)
cv2.imshow('wenzi_new', wenzi_new)
cv2.waitKey(0)运行结果:(左图为原图,右图为膨胀后的图)
3. 开运算与闭运算:组合拳更实用
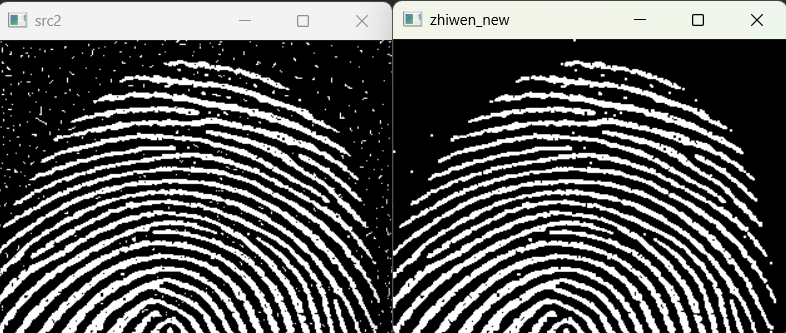
- 开运算:先腐蚀后膨胀。核心作用是平滑轮廓、断开狭窄的连接、消除细小的突出物(比如去除图像中的噪点)。
- 闭运算:先膨胀后腐蚀。核心作用是闭合前景区域的小空洞、连接断裂的轮廓。
python
# 开运算示例:处理指纹图像去噪
zhiwen = cv2.imread('zhiwen.png')
cv2.imshow('src2', zhiwen)
cv2.waitKey(0)
kernel = np.ones((2, 2), np.uint8)
# 开运算
zhiwen_new = cv2.morphologyEx(zhiwen, cv2.MORPH_OPEN, kernel)
cv2.imshow('zhiwen_new', zhiwen_new)
cv2.waitKey(0)
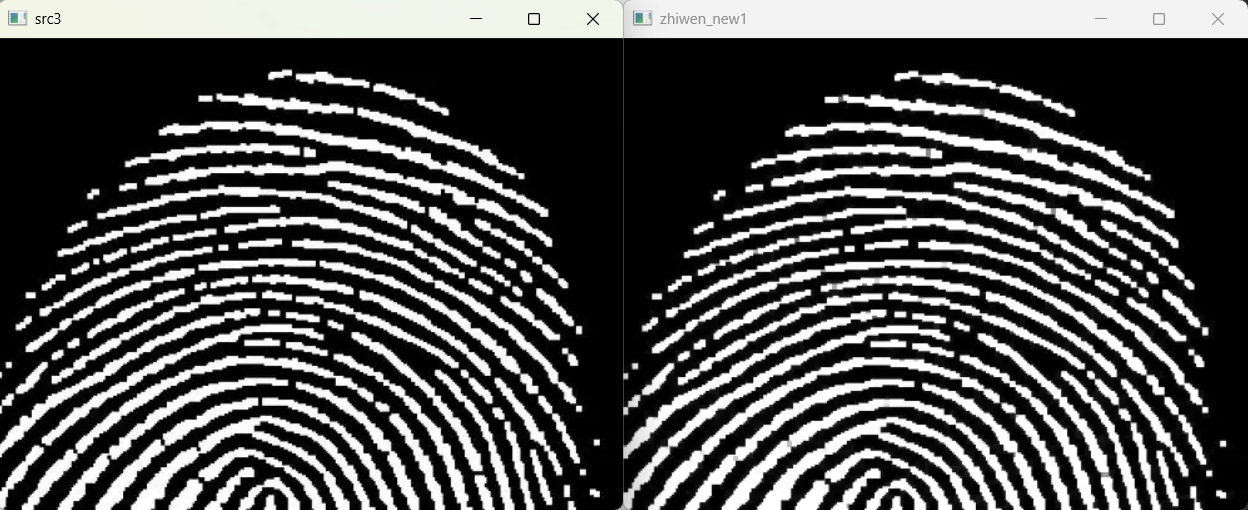
# 闭运算示例:填补指纹断裂区域
zhiwen_duan = cv2.imread('zhiwen_duan.png')
cv2.imshow('src3', zhiwen_duan)
cv2.waitKey(0)
kernel = np.ones((4, 4), np.uint8)
zhiwen_new1 = cv2.morphologyEx(zhiwen_duan, cv2.MORPH_CLOSE, kernel)
cv2.imshow('zhiwen_new1', zhiwen_new1)
cv2.waitKey(0)运行结果:
开运算:
闭运算:
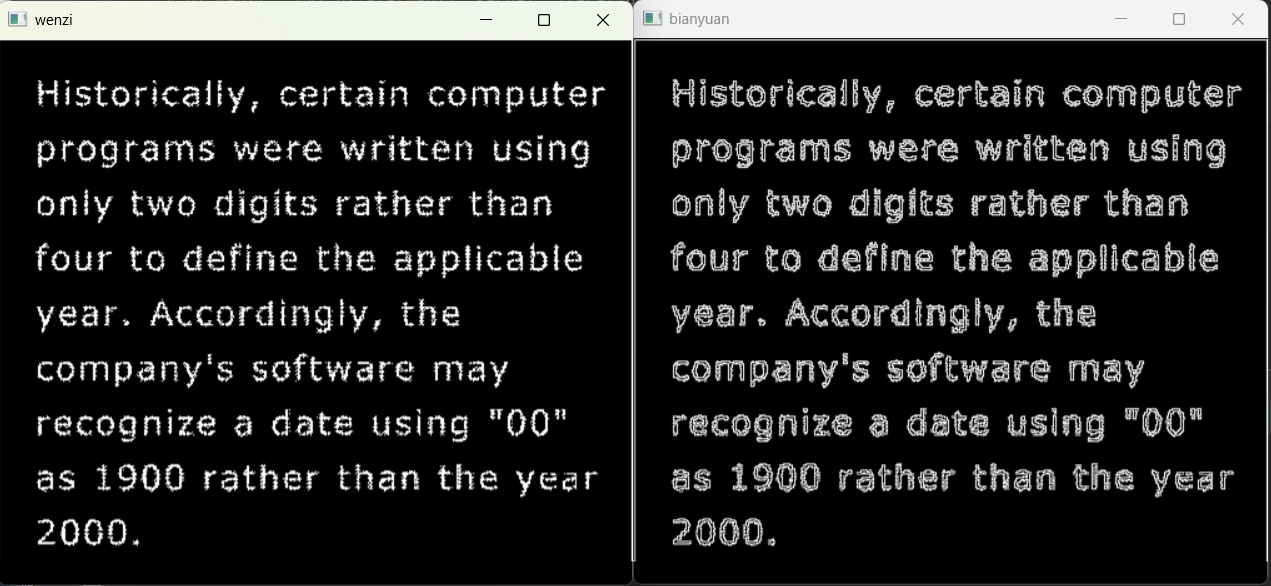
4. 梯度运算:提取图像轮廓
梯度运算 = 膨胀图像 - 腐蚀图像,核心作用是突出图像中强度变化剧烈的区域,也就是提取图像的轮廓。
python
# 提取文字轮廓
wenzi = cv2.imread('wenzi.png')
cv2.imshow('wenzi', wenzi)
cv2.waitKey(0)
kernel = np.ones((2, 2), np.uint8)
# 直接通过morphologyEx实现梯度运算
bianyuan = cv2.morphologyEx(wenzi, cv2.MORPH_GRADIENT, kernel)
cv2.imshow('bianyuan', bianyuan)
cv2.waitKey(0)运行结果:
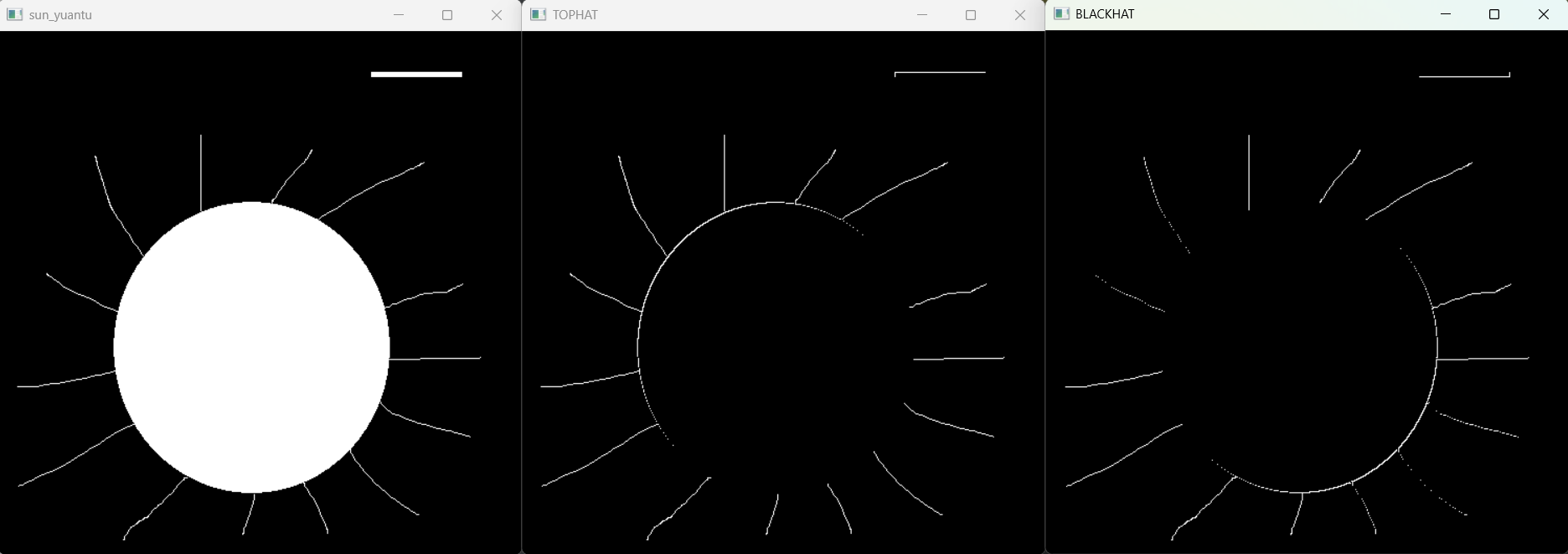
5. 顶帽与黑帽:提取细节特征
- 顶帽(Top Hat):原始图像 - 开运算结果,用于提取比周围区域亮的细节(比如图像中的小亮点)。
- 黑帽(Black Hat):闭运算结果 - 原始图像,用于提取比周围区域暗的细节(比如图像中的小黑点)。
python
sun = cv2.imread('sun.png')
cv2.imshow('sun_yuantu', sun)
cv2.waitKey(0)
kernel = np.ones((2, 2), np.uint8)
# 顶帽运算
tophat = cv2.morphologyEx(sun, cv2.MORPH_TOPHAT, kernel)
cv2.imshow('TOPHAT', tophat)
cv2.waitKey(0)
# 黑帽运算
blackhat = cv2.morphologyEx(sun, cv2.MORPH_BLACKHAT, kernel)
cv2.imshow('BLACKHAT', blackhat)
cv2.waitKey(0)运行结果:
二、OpenCV 边缘检测:捕捉图像的 "骨架"
边缘是图像中像素值发生剧烈变化的区域,边缘检测是目标识别、轮廓分析的基础。OpenCV 提供了多种经典的边缘检测算法,各有优劣。
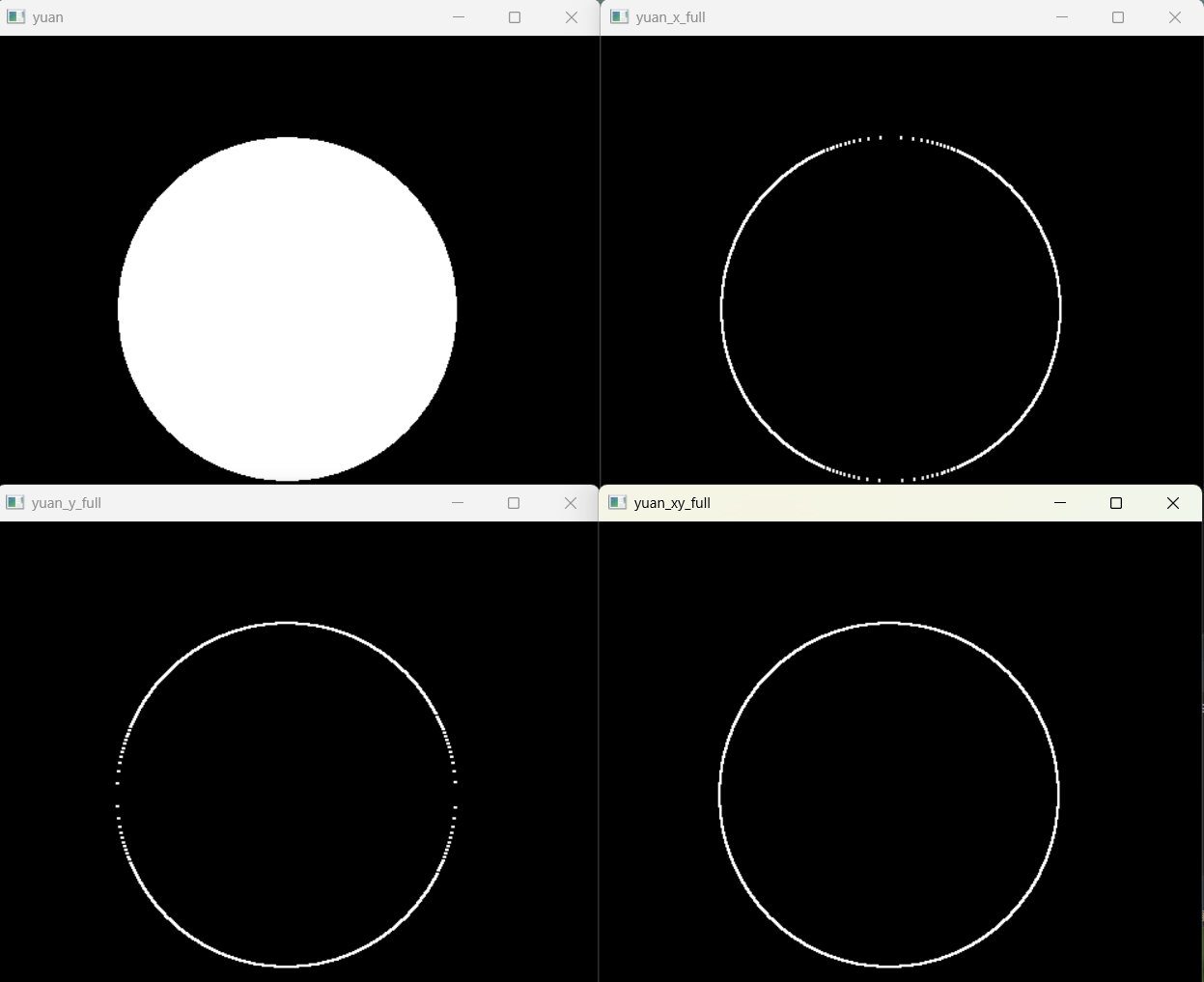
1. Sobel 算子:分方向检测边缘
Sobel 算子是一种一阶微分算子,分为 x 方向(检测垂直边缘)和 y 方向(检测水平边缘),通过计算像素的梯度值判断边缘。
注意:Sobel 计算会产生负数(表示像素值从亮到暗),而图像像素值范围是 0-255,因此需要用cv2.convertScaleAbs取绝对值才能完整显示边缘。
python
# 读取灰度图像(边缘检测建议用灰度图)
yuan = cv2.imread('yuan.png', cv2.IMREAD_GRAYSCALE)
cv2.imshow('yuan', yuan)
cv2.waitKey(0)
# x方向边缘检测
yuan_x_64 = cv2.Sobel(yuan, cv2.CV_64F, dx=1, dy=0)
yuan_x_full = cv2.convertScaleAbs(yuan_x_64)
cv2.imshow('yuan_x_full', yuan_x_full)
cv2.waitKey(0)
# y方向边缘检测
yuan_y_64 = cv2.Sobel(yuan, cv2.CV_64F, dx=0, dy=1)
yuan_y_full = cv2.convertScaleAbs(yuan_y_64)
cv2.imshow('yuan_y_full', yuan_y_full)
cv2.waitKey(0)
# 加权组合x和y方向边缘(效果优于直接dx=1,dy=1)
yuan_xy_full = cv2.addWeighted(yuan_x_full, 1, yuan_y_full, 1, 0)
cv2.imshow('yuan_xy_full', yuan_xy_full)
cv2.waitKey(0)运行结果:
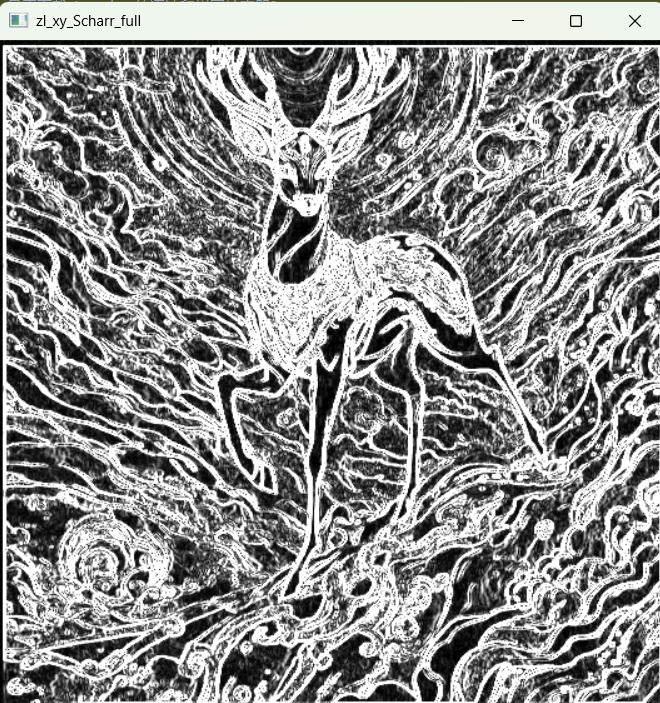
2. Scharr 算子:增强 Sobel 的边缘检测效果
Scharr 算子是对 Sobel 算子的改进,在小核(3x3)下能提供更精确的梯度计算,边缘检测效果更清晰,用法与 Sobel 完全一致。
python
zl = cv2.imread('img1.jpeg', cv2.IMREAD_GRAYSCALE)
# x方向Scharr检测
zl_x_64 = cv2.Scharr(zl, cv2.CV_64F, dx=1, dy=0)
zl_x_full = cv2.convertScaleAbs(zl_x_64)
# y方向Sobel检测(也可改用Scharr)
zl_y_64 = cv2.Sobel(zl, cv2.CV_64F, dx=0, dy=1)
zl_y_full = cv2.convertScaleAbs(zl_y_64)
# 组合边缘
zl_xy_Scharr_full = cv2.addWeighted(zl_x_full, 1, zl_y_full, 1, 0)
cv2.imshow('zl_xy_Scharr_full', zl_xy_Scharr_full)
cv2.waitKey(0)运行结果:
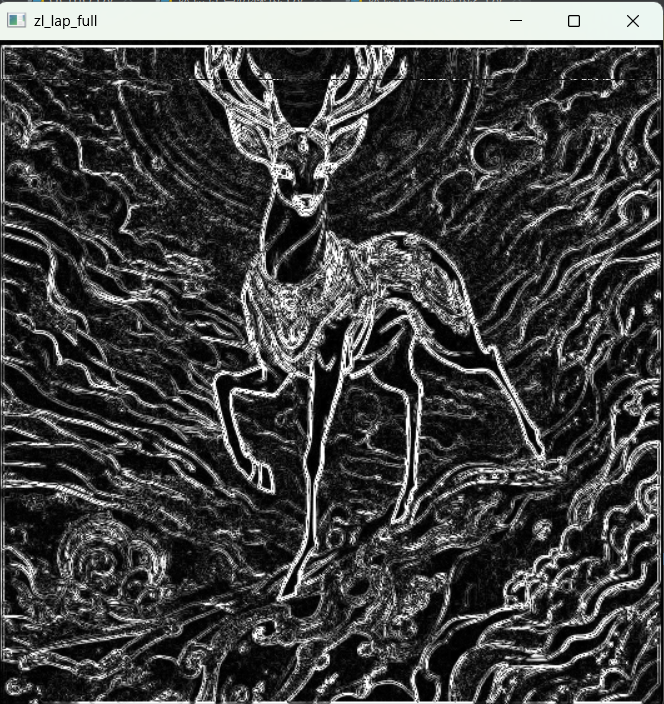
3. Laplacian 算子:二阶微分检测边缘
Laplacian 算子是二阶微分算子,能同时检测水平和垂直边缘,对噪声敏感,通常需要先降噪再使用。
python
zl = cv2.imread('img1.jpeg', cv2.IMREAD_GRAYSCALE)
# Laplacian边缘检测(3x3核)
zl_lap = cv2.Laplacian(zl, cv2.CV_64F, ksize=3)
zl_lap_full = cv2.convertScaleAbs(zl_lap)
cv2.imshow('zl_lap_full', zl_lap_full)
cv2.waitKey(0)运行结果:
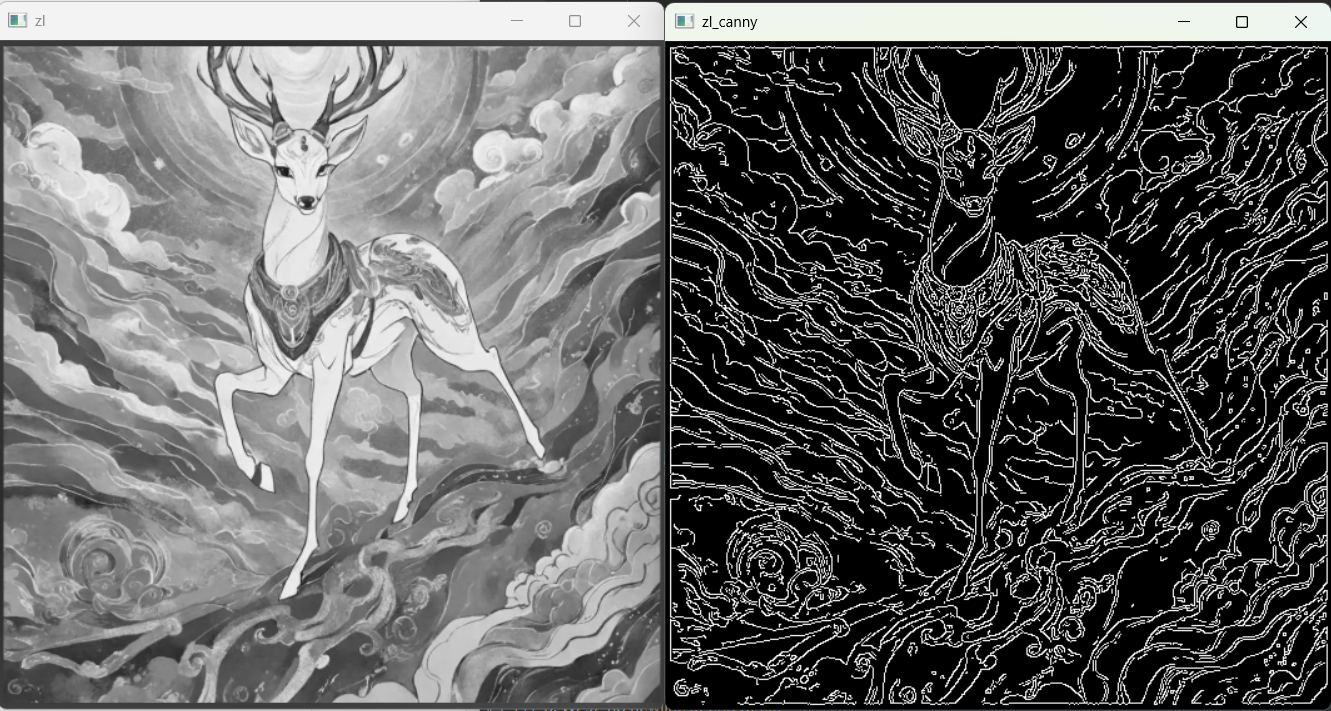
4. Canny 边缘检测:最优的边缘检测算法
Canny 是目前最常用的边缘检测算法,采用多阶段处理流程:降噪→计算梯度→非极大值抑制→双阈值筛选,能得到更精准、连续的边缘。
python
zl = cv2.imread('img1.jpeg', cv2.IMREAD_GRAYSCALE)
cv2.imshow('zl', zl)
cv2.waitKey(0)
# Canny边缘检测(阈值1:100,阈值2:150)
zl_canny = cv2.Canny(zl, 100, 150)
cv2.imshow('zl_canny', zl_canny)
cv2.waitKey(0)
# 最后释放窗口资源
cv2.destroyAllWindows()运行结果:
三、实战总结与技巧
- 形态学操作选型 :
- 去除小噪点、细化轮廓:用开运算;
- 填补小空洞、连接断裂轮廓:用闭运算;
- 提取轮廓:用梯度运算;
- 提取亮 / 暗细节:用顶帽 / 黑帽运算。
- 边缘检测选型 :
- 快速分方向检测:用 Sobel;
- 高精度小核检测:用 Scharr;
- 简单全方向检测:用 Laplacian(需降噪);
- 最优效果检测:用 Canny(调整双阈值是关键)。
- 通用技巧 :
- 形态学操作的 kernel 大小和迭代次数需根据图像实际情况调整,核越大、迭代次数越多,效果越明显;
- 边缘检测前建议将图像转为灰度图,减少计算量;
- Sobel/Scharr/Laplacian 需用cv2.CV_64F格式保留负数,再通过convertScaleAbs还原完整边缘。
四、写在最后
OpenCV 的形态学操作和边缘检测是计算机视觉的入门必修课,掌握这些基础操作后,可进一步应用到目标检测、图像分割、特征提取等复杂场景。建议大家结合不同的测试图像(如文字、指纹、自然图像)反复调试参数,直观感受不同算法的效果差异,才能真正理解其原理和适用场景。
总结
- 形态学操作核心是基于结构元素的像素遍历运算,腐蚀 / 膨胀是基础,开 / 闭运算、梯度、顶帽 / 黑帽是组合应用;
- 边缘检测中,Sobel/Scharr 是一阶微分算子(分方向),Laplacian 是二阶微分算子(全方向),Canny 是最优算法(多阶段处理);
- 实战中需根据场景选择合适的算法,并调整核心参数(如 kernel 大小、迭代次数、阈值)以达到最佳效果。