机器人电子皮肤系统开发:36通道柔性触觉阵列 + FPGA高速采集
引言
近年来,机器人触觉感知成为机器人研究的重要方向。相比传统传感器,电子皮肤(Electronic Skin,E‑skin)能够模拟人体皮肤的触觉能力,使机器人具备感知压力、触摸方式以及环境变化的能力。
本文介绍一套36通道柔性电子皮肤系统的设计方案,并分享其在机器人触觉识别中的开发经验。
该系统采用 FPGA 高速采集架构与多模态传感阵列,可以识别不同类型的人机触觉交互,例如轻触、点击、轻捏和强捏。同时系统还支持多种环境信息采集,如加速度、温度、湿度、光照和声音等,从而构建接近人类皮肤感知能力的机器人触觉系统。
一、电子皮肤系统架构
该电子皮肤系统主要由两个部分组成:
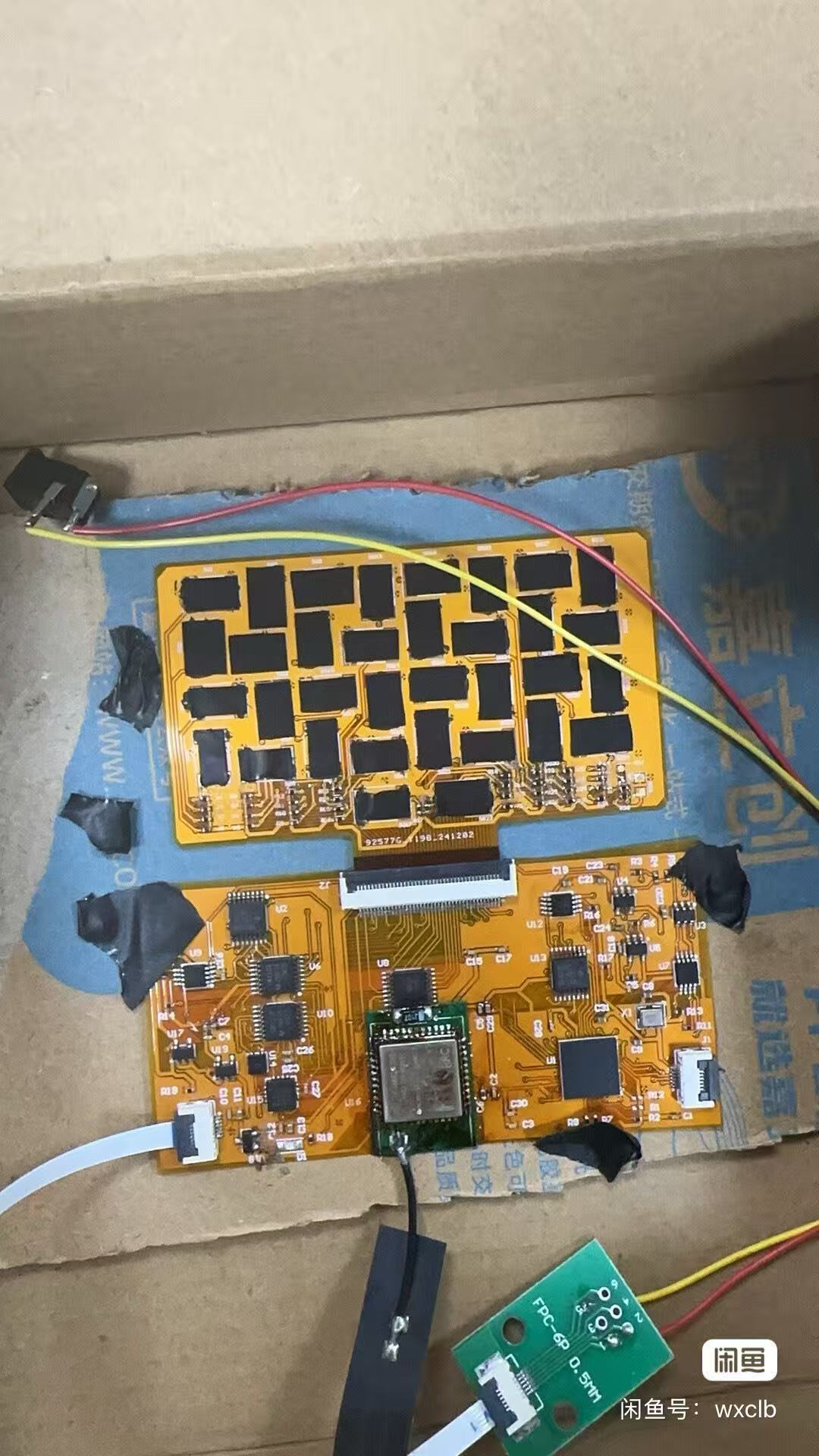
1)传感器阵列层
柔性 FPC 电路上集成多个传感单元,包括压力传感阵列、三轴加速度计、温湿度传感器、光照传感器以及声音传感器。
这些传感器均匀分布在柔性电路上,使其可以贴合在机器人表面,实现多点触觉感知。
2)数据采集层
数据采集系统由 Intel MAX10 FPGA、14bit SAR ADC、多路模拟开关以及 WiFi 通信模块组成。
该系统可以实现 36 通道同步采样,并实时发送触觉数据。
二、36通道触觉阵列设计
电子皮肤的核心是触觉传感阵列。
本系统设计了36个触觉传感单元,每个单元都能够检测压力变化。传感材料采用粘弹性导电材料,其电阻会随着外部压力变化而改变。
当手指触碰电子皮肤时:
压力 → 电阻变化 → 电压变化 → ADC采集
通过这种方式可以获取触觉信号并进行后续分析。
三、FPGA高速采集系统
为了保证多通道数据同步,本系统采用 FPGA 采集架构。
硬件结构包括:
-
5个模拟开关(TMUX1108)
-
3个14bit ADC(AD7940)
-
Intel MAX10 FPGA控制逻辑
FPGA主要负责:
-
通道扫描
-
时序控制
-
数据整合
-
无线发送
系统最高采样能力可达到2kHz多通道同步采样,数据通过WiFi模块以约1.5 Mbps速率发送到上位机。
四、混合采样架构
在电子皮肤系统中,不同传感器需要不同采样频率。例如:
触觉压力:1 kHz
加速度信号:2 kHz
环境参数:100 Hz
系统采用混合采样架构,FPGA将10 ms作为一个采样周期并划分为多个时间片,从而实现不同传感器的同步采样,同时避免采样冲突并保证时间一致性。
五、触觉交互识别实验
为了验证电子皮肤系统的触觉识别能力,我们测试了四种典型触觉动作:
-
Gentle touch(轻触)
-
Tap(点击)
-
Light pinch(轻捏)
-
Strong pinch(强捏)
实验平台包括电磁驱动装置、硅胶仿生手指、力传感器以及电子皮肤样品。通过控制压力和接触方式,可以模拟不同触觉动作。
六、触觉信号分析
为了区分不同触觉动作,我们定义了两个重要特征指标:
1)等效波形偏度(Equivalent Waveform Skewness,EWS)
用于描述触觉信号波形在时间维度上的不对称性。
2)等效负载(Equivalent Load,EL)
表示接触过程中整体压力强度。
通过EWS与EL两个参数,可以有效区分不同触觉动作,例如轻触、点击以及捏取。
七、电子皮肤机械特性
电子皮肤表面采用粘弹性封装材料。
实验结果显示,其平均卸载时间约为:
0.4 ± 0.2 秒
这种机械特性与人体皮肤类似,因此能够更真实地模拟触觉行为。
八、机器人应用场景
电子皮肤在机器人领域具有广泛应用,例如:
1)机器人触觉感知
机器人可以感知触摸强度、触摸位置以及触觉类型。
2)人机交互
例如拍机器人、触摸控制、握手等交互动作。
3)情感交互机器人
未来电子皮肤还可以用于识别抚摸、安抚等情感触觉行为。
九、总结
本文介绍了一种36通道柔性电子皮肤系统,该系统具有多模态传感、FPGA高速采集以及混合采样架构等特点。
该系统为机器人触觉感知提供了一个可扩展的平台,在机器人、人机交互以及智能假肢等领域具有广阔应用前景。
技术交流
在实际项目中,我们也设计了一套36通道电子皮肤触觉阵列模块,可用于机器人触觉研究和算法验证。
如果有从事机器人触觉、柔性传感器或人机交互相关研究的工程师,欢迎交流技术问题。