记录下单片机使用工厂方法模式和桥接模式结合使用
之前分别记录了工厂方法模式和桥接模式,现在需要结合起来使用
例 需要多个DS8B20温度传感器和多个MAX31855芯片获取热电偶温度
sensor.h
c
#ifndef __DRV_SENSOR_H
#define __DRV_SENSOR_H
#include <stdint.h>
/* 传感器类型枚举 */
typedef enum {
SENSOR_DS18B20,
SENSOR_DHT22,
SENSOR_MAX31855,
SENSOR_PT100,
SENSOR_PT1000,
SENSOR_NTC,
SENSOR_TYPE_MAX
} SensorType_t;
/* 传感器对象结构体(类似于抽象类) */
typedef struct {
void (*Init)(void *pPrivate); // 初始化函数
float (*Read)(void *pPrivate); // 读取数据函数
void *pPrivate; // 私有数据(具体传感器需要的硬件信息)
const char *name; // 传感器名称
} Sensor_t;
/* 工厂函数:创建传感器对象(返回常量指针,避免外部修改) */
//const Sensor_t* Sensor_Create(SensorType_t type);
const Sensor_t* Sensor_Create(SensorType_t type, uint8_t instance);
#endifsensor.c
c
#include "drv_sensor.h"
#include "drv_DHT22.h"
#include "drv_DS18B20.h"
#include "drv_MAX31855.h"
#include "bsp_spi.h"
#include "bsp_timer.h"
/* 支持的最大DS18B20实例数 */
#define DS18B20_MAX_INSTANCE 5
#define MAX31855_MAX_INSTANCE 5
/* 静态私有数据实例(假设使用固定的引脚:例如 GPIOA, GPIO_PIN_0) */
static DS18B20_Private_t ds18b20_priv0 = {
.port = GPIOA,
.pin = GPIO_PIN_0
};
static DS18B20_Private_t ds18b20_priv1 = {
.port = GPIOA,
.pin = GPIO_PIN_1
};
static const Sensor_t ds18b20_sensor[DS18B20_MAX_INSTANCE] = {
{
.Init = DS18B20_Init,
.Read = DS18B20_Read,
.pPrivate = &ds18b20_priv0,
.name = "DS18B20_0"
},
{
.Init = DS18B20_Init,
.Read = DS18B20_Read,
.pPrivate = &ds18b20_priv1,
.name = "DS18B20_1"
}
};
/* DHT22 私有数据 */
static DHT22_Private_t dht22_priv =
{
.port = GPIOB,
.pin = GPIO_PIN_1
};
static const Sensor_t dht22_sensor =
{
.Init = DHT22_Init,
.Read = DHT22_Read,
.pPrivate = &dht22_priv,
.name = "DHT22"
};
// 声明SPI句柄
SoftSPI_HandleTypeDef hspi2 =
{
.name = "hspi2",
// 配置SPI1引脚(模拟)
.SCK_Port = GPIOF,
.SCK_Pin = GPIO_PIN_7,
.MOSI_Port = GPIOF,
.MOSI_Pin = GPIO_PIN_9,
.MISO_Port = GPIOF,
.MISO_Pin = GPIO_PIN_8,
.NSS_Port = GPIOF,
.NSS_Pin = GPIO_PIN_6,
// 配置参数
.mode = SPI_MODE0, // 模式0
.firstBit = SPI_FIRSTBIT_MSB, // MSB先行
.baudRatePrescaler = SPI_BAUDRATE_DIV256, // ~2.6MHz
// 使用默认软件定时器延时
.useHardwareDelay = 0,
/* 函数指针 */
.ChipSelect = SoftSPI_ChipSelect,
.Init = SoftSPI_Init,
.TransferBytes = SoftSPI_TransferBytes,
.WriteByte = SoftSPI_WriteBytes,
.ReadByte = SoftSPI_ReadBytes,
.delay_ns = NULL,
.delay_us = HAL_Delay_us,
.delay_ms = HAL_Delay
};
// 声明SPI句柄
SoftSPI_HandleTypeDef hspi3 =
{
.name = "hspi3",
// 配置SPI1引脚(模拟)
.SCK_Port = GPIOF,
.SCK_Pin = GPIO_PIN_7,
.MOSI_Port = GPIOF,
.MOSI_Pin = GPIO_PIN_9,
.MISO_Port = GPIOF,
.MISO_Pin = GPIO_PIN_8,
.NSS_Port = GPIOF,
.NSS_Pin = GPIO_PIN_10,
// 配置参数
.mode = SPI_MODE0, // 模式0
.firstBit = SPI_FIRSTBIT_MSB, // MSB先行
.baudRatePrescaler = SPI_BAUDRATE_DIV256, // ~2.6MHz
// 使用默认软件定时器延时
.useHardwareDelay = 0,
/* 函数指针 */
.ChipSelect = SoftSPI_ChipSelect,
.Init = SoftSPI_Init,
.TransferBytes = SoftSPI_TransferBytes,
.WriteByte = SoftSPI_WriteBytes,
.ReadByte = SoftSPI_ReadBytes,
.delay_ns = NULL,
.delay_us = HAL_Delay_us,
.delay_ms = HAL_Delay
};
MAX31855_Private_t MAX31855_priv[] =
{
{
.hspi = &hspi2
},
{
.hspi = &hspi3
}
};
static const Sensor_t MAX31855_sensor[MAX31855_MAX_INSTANCE] =
{
{
.Init = MAX31855_Init,
.Read = MAX31855_Read,
.pPrivate = &MAX31855_priv[0],
.name = "MAX31855_0"
},
{
.Init = MAX31855_Init,
.Read = MAX31855_Read,
.pPrivate = &MAX31855_priv[1],
.name = "MAX31855_1"
},
};
///* 工厂函数:根据类型返回对应的传感器对象 */
//const Sensor_t* Sensor_Create(SensorType_t type)
//{
// switch (type) {
// case SENSOR_DS18B20:
// return &ds18b20_sensor;
// case SENSOR_DHT22:
// return &dht22_sensor;
// case SENSOR_MAX31855:
// return &MAX31855_sensor;
// default:
// return NULL;
// }
//}
/* 获取指定实例 */
const Sensor_t* DS18B20_GetInstance(uint8_t instance)
{
if (instance < DS18B20_MAX_INSTANCE) {
return &ds18b20_sensor[instance];
}
return NULL;
}
/* 获取指定实例 */
const Sensor_t* MAX31855_GetInstance(uint8_t instance)
{
if (instance < MAX31855_MAX_INSTANCE) {
return &MAX31855_sensor[instance];
}
return NULL;
}
const Sensor_t* Sensor_Create(SensorType_t type, uint8_t instance)
{
switch (type) {
case SENSOR_DS18B20:
return DS18B20_GetInstance(instance); // 支持多个实例
case SENSOR_DHT22:
// DHT22若只有一个实例,instance参数可忽略或检查
if (instance == 0) return &dht22_sensor;
else return NULL;
case SENSOR_MAX31855:
return MAX31855_GetInstance(instance);
default:
return NULL;
}
}MAX31855.h
c
#ifndef __DRV_MAX31855_H
#define __DRV_MAX31855_H
#include <stdlib.h>
#include <string.h>
#include <stdint.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include "stm32f4xx_hal.h"
//#include "drv_sensor.h"
#include "bsp_spi.h"
typedef struct
{
SoftSPI_HandleTypeDef *hspi;
}MAX31855_Private_t;
static uint8_t MAX31855_ReadData(void *pPrivate, float *temp);
void MAX31855_Init(void *pPrivate);
float MAX31855_Read(void *pPrivate);
#endif原先的DS18B20和DHT22的文件则无需改变
MAX31855.c
c
#include "drv_MAX31855.h"
static uint8_t MAX31855_ReadData(void *pPrivate, float *temp)
{
MAX31855_Private_t *priv = (MAX31855_Private_t *)pPrivate;
/* 相关SPI的操作 */
// priv->hspi->ChipSelect(priv->hspi, 0);
// priv->hspi->delay_ms(20);
//
//
// priv->hspi->ChipSelect(priv->hspi, 1);
// priv->hspi->delay_ms(20);
}
void MAX31855_Init(void *pPrivate)
{
MAX31855_Private_t *priv = (MAX31855_Private_t *)pPrivate;
printf("MAX31855 SPI is %s\n",priv->hspi->name);
printf("MAX31855 Init is OK \n");
}
float MAX31855_Read(void *pPrivate)
{
// float temp;
// if (MAX31855_ReadData(pPrivate, &temp,)
// {
// // 返回温度值(保留一位小数)
// return temp / 10.0f;
// }
// return -999.0f; // 错误标志
return 25; //
}测试
c
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
EventRecorderInitialize(EventRecordAll, 1U);
EventRecorderStart();
/* USER CODE END SysInit */
DWT_Init();
/* Initialize all configured peripherals */
MX_GPIO_Init();
/* USER CODE BEGIN 2 */
// 创建温度传感器(DS18B20)
const Sensor_t *temp_sensor0 = Sensor_Create(SENSOR_DS18B20,0);
if (temp_sensor0)
{
temp_sensor0->Init(temp_sensor0->pPrivate);
printf("Sensor is %s\n", temp_sensor0->name);
}
const Sensor_t *temp_sensor1 = Sensor_Create(SENSOR_DS18B20,1);
if (temp_sensor1)
{
temp_sensor1->Init(temp_sensor1->pPrivate);
printf("Sensor is %s\n", temp_sensor1->name);
}
// 创建湿度传感器(DHT22)
const Sensor_t *humi_sensor = Sensor_Create(SENSOR_DHT22,0);
if (humi_sensor) {
humi_sensor->Init(humi_sensor->pPrivate);
printf("Sensor is %s\n", humi_sensor->name);
}
// 使用MAX31855来测量热电偶
const Sensor_t *temp_sensor2 = Sensor_Create(SENSOR_MAX31855,0);
if (temp_sensor2)
{
temp_sensor2->Init(temp_sensor2->pPrivate);
printf("Sensor is %s\n",temp_sensor2->name);
}
const Sensor_t *temp_sensor3 = Sensor_Create(SENSOR_MAX31855,1);
if (temp_sensor3)
{
temp_sensor3->Init(temp_sensor3->pPrivate);
printf("Sensor is %s\n",temp_sensor3->name);
}
/* 读取各个温度传感器温度 */
if (temp_sensor0)
{
float t = temp_sensor0->Read(temp_sensor0->pPrivate);
printf("Sensor is %s,Temperature: %.2f°C\n", temp_sensor0->name,t);
}
if (temp_sensor1)
{
float t = temp_sensor1->Read(temp_sensor1->pPrivate);
printf("Sensor is %s,Temperature: %.2f°C\n", temp_sensor1->name,t);
}
if (temp_sensor2)
{
float t = temp_sensor2->Read(temp_sensor2->pPrivate);
printf("Sensor is %s,Temperature: %.2f°C\n", temp_sensor2->name,t);
}
if (temp_sensor3)
{
float t = temp_sensor3->Read(temp_sensor3->pPrivate);
printf("Sensor is %s,Temperature: %.2f°C\n", temp_sensor3->name,t);
}
if (humi_sensor)
{
float h = humi_sensor->Read(humi_sensor->pPrivate);
printf("Humidity: %.2f%%\n", h);
}
while (1) {
HAL_Delay(2000);
}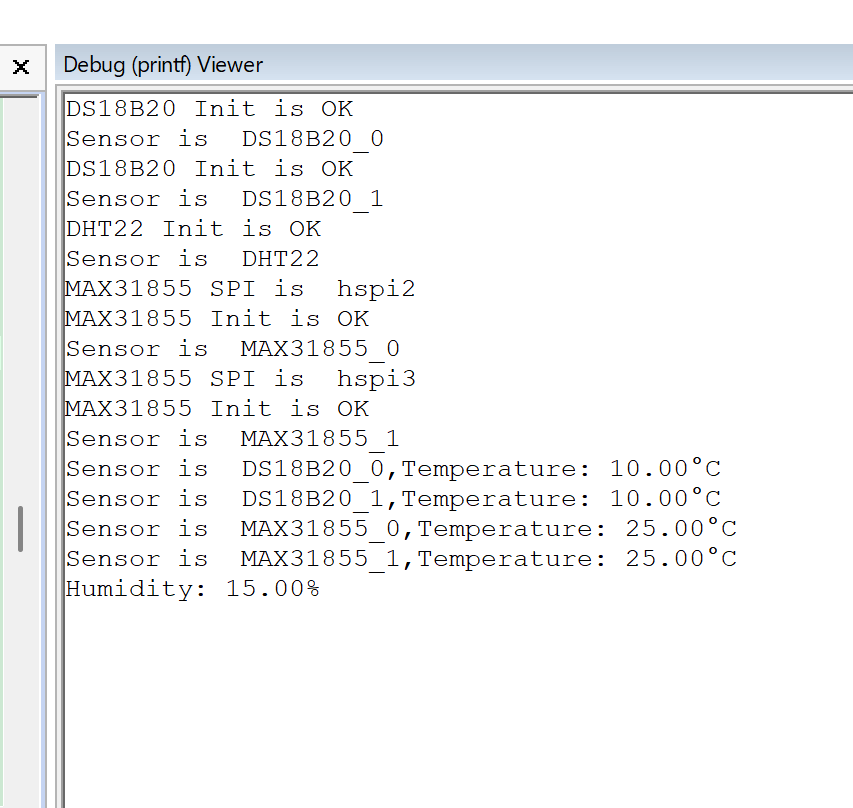
可以看到创建了多个不同的传感器,并且正确显示温度