一、适用场景
适用场景:防盗/防移动报警(机箱/设备被碰撞报警)、机械振动监测(异常振幅提示)、敲击触发(敲击开关)、跌落检测、简单冲击计数、测试台/生产线故障检测、嵌入式中断与 ADC 采样练习。
二、器材清单
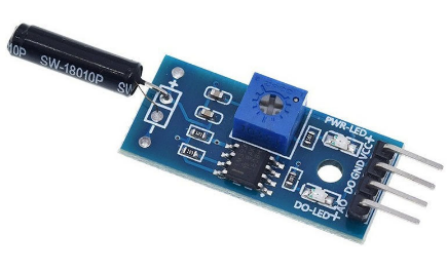
振动传感器 ×1。
stm32f103(或其它 STM32)开发板 ×1
若干杜邦线(母对母/公对母)×1组
稳定电源(3.3V 或 5V,按模块标注)×1
三、工作原理(要点)
基于弹簧摆动原理设计的震动传感器,震动势能传到弹簧末端引起共振,左右摆动碰触到金属外壁形成通路。在静止时任何角度都为开路OFF状态,输出低电平,当受到外力碰撞或者大力晃动时,弹簧变形和中心电极接触导通使两个引脚瞬间导通为ON状态,当外力消失时,电路恢复为开路OFF状态,输出高电平。
由于导通时间和弹簧的刚性有关,所以该震动传感器的输出带宽很窄,在读取时,建议使用外部中断功能。
四、接线示意
GND → GND
VCC→ 5V/3.3V电源
标准库
DO
DO→ PC1
AO
AO→ PC1
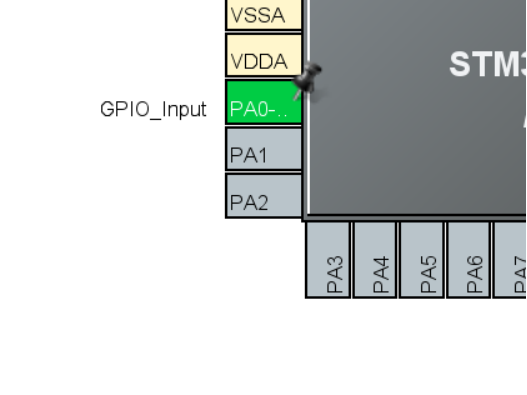
HAL库
DO
DO→ PA0
AO
AO→ PA0
五、示例代码
标准库
DO
cpp
#include "stm32f10x.h"
#include "stdio.h"
#include "bsp_SysTick.h"
#include "bsp_usart.h"
void gpio_init()
{
GPIO_InitTypeDef PC;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);
//振感
PC.GPIO_Pin = GPIO_Pin_1;
PC.GPIO_Mode = GPIO_Mode_IPD;
GPIO_Init(GPIOC,&PC);
}
int main(void)
{
SysTick_Init(); //延时函数初始化
gpio_init(); //初始化与LED连接的硬件接口
USART_Config();
while(1)
{
if(GPIO_ReadInputDataBit(GPIOC,GPIO_Pin_1) == 0)
{
Usart_SendString(USART1,"振动\n");
}else
{
Usart_SendString(USART1,"静止\n");
}
Delay_us(500000);
}
}AO
cpp
#include "breathing.h"
#include "stm32f10x.h"
#include "stdio.h"
#include "bsp_usart.h"
char showlight[20];
extern volatile uint16_t adc_light;
void TIM3_Int_Init(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //时钟使能
//定时器TIM3初始化
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式,即从0开始向上数到越界
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据指定的参数初始化TIMx的时间基数单位
TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE ); //使能指定的TIM3中断,允许更新中断
//中断优先级NVIC设置
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //TIM3中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占优先级0级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能
NVIC_Init(&NVIC_InitStructure); //初始化NVIC寄存器
TIM_Cmd(TIM3, ENABLE); //使能TIMx
}
void TIM3_IRQHandler(void)
{
uint16_t value;
value = (adc_light)/74;
if(TIM_GetITStatus(TIM3,TIM_IT_Update) == SET)
{
sprintf(showlight,"light:%d,value:%d\n",adc_light,value);
Usart_SendString(USART1,showlight);
}
TIM_ClearITPendingBit(TIM3,TIM_IT_Update);
}
#include "adc_time.h"
#include "stm32f10x.h"
volatile uint16_t adc_light;
void adcgpio_init()
{
GPIO_InitTypeDef PC;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);
PC.GPIO_Pin = GPIO_Pin_1;
PC.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init(GPIOC,&PC);
}
void adcmode_init()
{
ADC_InitTypeDef adc;
NVIC_InitTypeDef nvic;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC2,ENABLE);
adc.ADC_Mode=ADC_Mode_Independent;
adc.ADC_ScanConvMode = DISABLE;
adc.ADC_ContinuousConvMode = ENABLE;
adc.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;
adc.ADC_DataAlign = ADC_DataAlign_Right;
adc.ADC_NbrOfChannel = 1;
ADC_Init(ADC2,&adc);
RCC_ADCCLKConfig(RCC_PCLK2_Div8);
ADC_RegularChannelConfig(ADC2,ADC_Channel_11,1,ADC_SampleTime_55Cycles5);
ADC_ITConfig(ADC2,ADC_IT_EOC,ENABLE);
ADC_Cmd(ADC2,ENABLE);
ADC_ResetCalibration(ADC2);
while(ADC_GetResetCalibrationStatus(ADC2));
ADC_StartCalibration(ADC2);
while(ADC_GetCalibrationStatus(ADC2));
ADC_SoftwareStartConvCmd(ADC2,ENABLE);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_3);
nvic.NVIC_IRQChannel = ADC1_2_IRQn;
nvic.NVIC_IRQChannelPreemptionPriority = 3;
nvic.NVIC_IRQChannelSubPriority = 0;
nvic.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&nvic);
}
void adctime_Init()
{
adcgpio_init();
adcmode_init();
}
void ADC1_2_IRQHandler(void)
{
if(ADC_GetITStatus(ADC2,ADC_IT_EOC) == SET)
{
adc_light = ADC_GetConversionValue(ADC2);
}
ADC_ClearITPendingBit(ADC2,ADC_IT_EOC);
}
#include "stm32f10x.h"
#include "stdio.h"
#include "bsp_SysTick.h"
#include "adc_time.h"
#include "breathing.h"
#include "bsp_usart.h"
int main()
{
SysTick_Init();
TIM3_Init();
USART_Config();
adctime_Init();
TIM3_Int_Init(4999,7199); //定时500ms
while(1)
{
}
// return 0;
}HAL库
DO
cpp
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0) == 1)
HAL_UART_Transmit(&huart1,"无震动\r\n", strlen("无震动\r\n"), HAL_MAX_DELAY);
else
HAL_UART_Transmit(&huart1,"有震动\r\n", strlen("有震动\r\n"), HAL_MAX_DELAY);
HAL_Delay(1000);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}AO
cpp
int main(void)
{
/* USER CODE BEGIN 1 */
char show[20]={0};
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
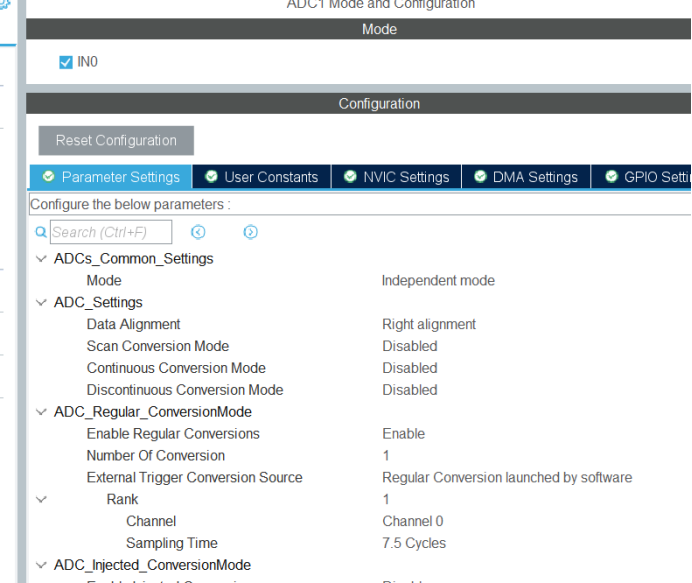
MX_ADC1_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
//#1。启动常规序列
HAL_ADC_Start(&hadc1);
//#2.等待转换完成
HAL_ADC_PollForConversion(&hadc1,HAL_MAX_DELAY);
//#3。获取结果
uint32_t dr = HAL_ADC_GetValue(&hadc1);
//#4.把结果转换成电压
float voltage = dr *(3.3f-0.0f)/4095.0f;
sprintf(show,"adc:%d,%.2f\n",dr,voltage);
HAL_UART_Transmit(&huart1,show,strlen(show),HAL_MAX_DELAY);
HAL_Delay(500);
// if(voltage>1.5f)//光线暗
// HAL_GPIO_WritePin(GPIOA,GPIO_PIN_13,GPIO_PIN_SET);// 灭灯
// else//光线亮
// HAL_GPIO_WritePin(GPIOA,GPIO_PIN_13,GPIO_PIN_RESET); // 亮灯
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}六、讲解视频