02计算机组成原理-Cache的组相联和全相联映射
前言
上一节博客讲了Cache的直接映射,这届博客来讲Cache的组相联和全相联
1.全相联映射
全相联映射(Fully Associative Mapping)是一种缓存映射技术,它为内存块提供最大的灵活性,允许缓存中的任何位置存储任何内存块 。相比于直接映射和,全相联映射在减少冲突缺失方面表现更佳,但伴随而来的是更高的硬件复杂度和成本。简单来说就是一个内存块可以放到Cache中的任意一个位置
在全相联缓存中,每个缓存条目都可以存放来自主存中任何地址的数据块 。这意味着每个缓存项都有一个对应的标记(Tag)、有效位(Valid Bit)以及数据存储区域。有效位用来指示该缓存项是否有有效数据,而标记则用于识别该缓存项存储的是主存中哪个地址的数据。
直接映射工作原理:
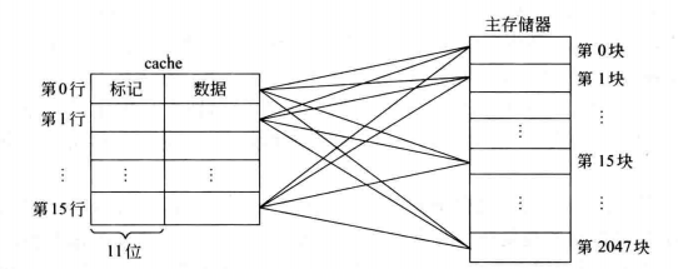
分块与编号:主存和Cache都被分为固定大小的数据块。主存分块,Cache分行,主存的块和Cache行中的数据区域大小相同。
地址结构:主存地址可以被细分为主存块地址(标记位)和块内偏移地址。区别于前面的直接映射:没有了组号。
映射算法:主存的数据块可以映射到Cache的任意行,即主存中的某一数据块可以放置在Cache中的任意块。
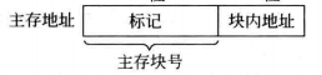
查找机制:为了找到指定的块,Cache中的每个项都需要被检索,因为该块可能被存放在Cache中的任何位置 。这个过程是通过一个与Cache中每个项都相关的比较器并行完成的。下面这个图是直接映射的工作原理的图,这里只需要一个比较器是因为我们知道主存可以分为行号和标记,我们可以直接去对应的Cache行中找,而这里是全相联的,主存地址只能分为标记和块内地址,为了方便比较我们给每一个Cache行都加一个比较器,通过总线把标记位传给这些比较器,得到结果要不是只有一位是1(且有效位是1查找成功),要不全是0,说明缺失,去访存即可。所以全相联的比较器的个数是Cache行的个数,而直接映射的比较器只需一个即可。
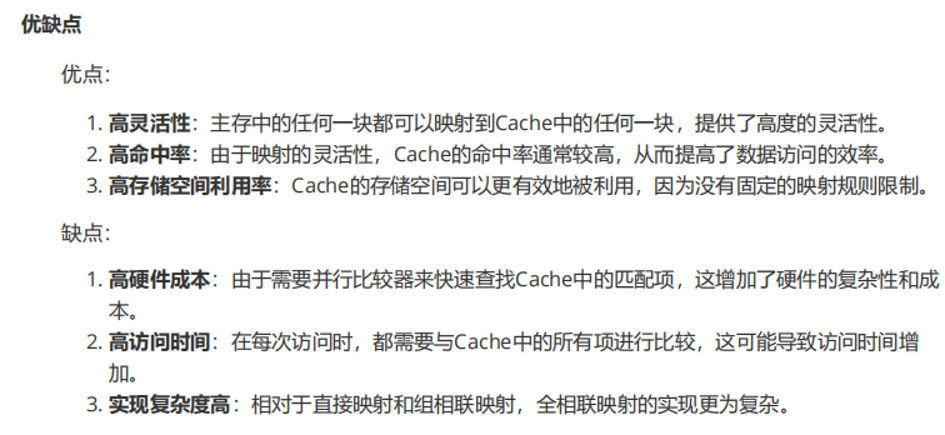
全相联映射通常用于块数较少的Cache中,因为它在硬件成本和数据访问效率之间提供了较好的平衡。然而,随着Cache容量的增加,全相联映射的硬件成本可能会迅速上升,因此在实际应用中,组相联映射(Set Associative Mapping)往往是一个更实际的选择。
2.组相联映射
组相联(Set Associative)缓存设计是直接映射和全相联映射之间的一个折中方案,它试图平衡二者的优势,既减少冲突缺失,又避免全相联映射的高硬件复杂度和成本。
在组相联缓存中,缓存被划分为多个组,每个组包含固定数量的缓存行(或称块)。每个内存块可以映射到与之关联的组内的任意一个缓存行,但不能映射到其他组。映射方式是用主存块号对组数取模得到该主存单元应该在Cache的第几组。这种设计结合了直接映射(通过索引确定唯一组)和全相联映射(组内任意缓存行)的特点。
在这种映射方式中,主存储器和高速缓存被分成相同大小的组(Set),每个组内再被分为相同大小的块(Block)。组间采用直接映射,而组内的块之间则采用全相联映射。
若一组有r个Cache行,被称为r路组相联。
组相联工作原理:
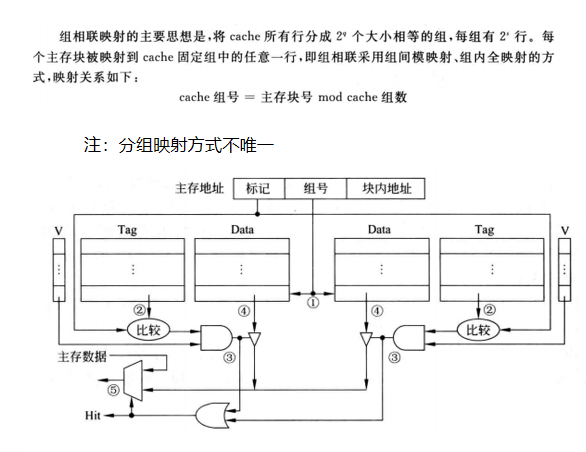
r路组相联需要r个比较器来确定,因为主存地址中是可以确定组号的,我们只需去对应的那一组找就可以了,而又因为是r路,即一组中有r个Cache行,所以需要r个比较器。
分组:主存储器和高速缓存被划分为大小相等的组。假设主存储器有M个块,高速缓存有N个块,每组有S个块,则高速缓存有N/S个组。
索引:当CPU需要访问主存储器中的某个块时,首先根据主存地址的某一部分(索引域)来确定该块应映射到高速缓存的哪一个组。具体地,假设主存地址由<Tag, Index, Offset>三部分组成,其中Index用于确定组号 。这里跟直接映射的区别就是中间用Cache的组号替代了Cache行数。

块匹配:在确定了组号后,CPU会在该组内的所有块中查找与主存块匹配的块。匹配是通过比较主存地址的Tag部分和高速缓存块中的Tag标记来实现的
注意直接映射是没有替换策略的,因为它放的位置只有那一行,当产生冲突的时候没有选择,直接替换即可。
注:直接映射可以看作是 1路组相联
全相联映射可以看作是只有1组的组相联,即所以Cache行分为1组
比较器的个数:r路组相联需要r个比较器。比较器的位数=地址标记字段的位数(tag位数)
组相联映射广泛应用于现代处理器的多级缓存设计中,尤其是在L1或L2缓存,因为它在成本和性能之间达到了一个很好的平衡。通过调整组数和路数,设计者可以根据特定应用场景和性能目标来优化缓存性能,比如对冲突缺失敏感的应用可能倾向于使用更高路数的组相联缓存。
组相联缓存查找过程:
-
地址解析:处理器请求的内存地址被解析为标记(Tag)、索引(Index)和偏移(Offset)。索引用于确定请求数据可能所在的组。
-
组选择:根据索引值,直接选择对应的组。这意味着索引位数决定了组的数量,每增加一位索引,组数翻倍而组的大小减半。
-
并行比较:选定的组中所有缓存行的标记与请求地址的标记部分并行比较。增加相联度(每组的缓存行数)可以提高并行度,从而可能减少查找时间,但同时增加了硬件复杂性和成本。
-
标记与偏移:相联度的增加会导致每组的块数增多,因此索引位减少,标记位相应增加,以维持地址的唯一性。标记位的增多是为了能够唯一标识组内更多的块。
硬件选择:
地址映射这块就结束了,下节博客讲替换算法。大概先写这些吧,今天的博客就先写到这,谢谢您的观看。