摘要: 在高压变电站的无人值守改造中,巡检设备的跨层调度面临着强电磁脉冲与严苛温差的严峻考验。本文将从工业物联网架构师的视角,深度解析机器人梯控 系统的抗干扰选型与底层设计。通过探讨数字磁隔离、边缘状态机防抖算法以及异步消息重传机制,展示如何在极端电气环境下构建高可用的垂直调度架构,并分享一段极具工程参考价值的状态机代码。
导语: 变电站环境下的电气噪声对常规通讯模块是致命的。为了实现跨层巡检的无人化,底层控制系统必须具备应对强谐波干扰的能力。本文将解析一套高可靠的机器人梯控 边缘架构,探讨其物理层防护与业务逻辑的解耦实现。
物理层与逻辑层解耦:重构变电站机器人梯控 调度链路

一、 变电站环境下的物理层抗干扰架构设计 在 110kV 或更高电压等级的变电站内,断路器分合闸产生的电磁干扰极其强烈。普通的 RC 滤波电路根本无法应对这种瞬态冲击。 工业级架构必须引入深度隔离机制:
- 隔离总线设计:在采集底层物理电平(如平层信号、开关门限位)时,摒弃传统光耦,采用数字磁隔离(Magnetic Isolation)芯片。这种技术具备极高的共模瞬态抗扰度(CMTI),能有效防止高压地环路电流击穿主板。
- 工业级供电:采用支持 9-36V 甚至更宽范围的直流电源模块,内置大容量 TVS 管,确保在机房电网剧烈波动时,核心处理器(MCU)依然能获得纯净的电源。
二、 逻辑层解耦:边缘自治与软件防抖算法 在强磁场环境下,传感器传回的物理电平往往伴随严重的毛刺。如果调度系统直接读取这些原始数据,会导致严重的状态机错乱。 高可用的架构将"去抖动"任务下沉至边缘侧。边缘网关通过积分算法或时间窗机制,对物理信号进行二次清洗。只有当电平持续稳定超过安全阈值后,才将其封装为结构化的 JSON 报文向上层发布。
三、 核心代码实战:边缘防抖与异常自愈状态机 以下 Python 代码模拟了运行在边缘设备上的状态监控逻辑。该逻辑通过软件滤波机制,屏蔽了变电站环境下的异常毛刺干扰。
Python
import time
import json
import logging
logging.basicConfig(level=logging.INFO, format='%(asctime)s - [SUBSTATION_EDGE] - %(message)s')
class SubstationElevatorController:
def __init__(self):
self.system_state = "IDLE"
self.bouncing_delay = 0.08 # 设定80毫秒的抗电磁干扰防抖时间窗
self.signal_trigger_time = 0
def fetch_isolated_hardware_signals(self):
"""模拟通过磁隔离总线读取的底层干接点电平"""
# 在强磁场下,此信号可能存在瞬态跳变
return {"leveling_accurate": 1, "door_locked": 1}
def process_inspection_task(self):
"""边缘自治状态机,处理巡检机器人的跨层准入"""
raw_signals = self.fetch_isolated_hardware_signals()
# 逻辑与判断:绝对平层且门机锁止
if raw_signals["leveling_accurate"] == 1 and raw_signals["door_locked"] == 1:
if self.signal_trigger_time == 0:
self.signal_trigger_time = time.time()
# 持续监控,过滤电磁毛刺
elif (time.time() - self.signal_trigger_time) > self.bouncing_delay:
if self.system_state != "ACCESS_GRANTED":
logging.info("Hardware signals stabilized. EMP filtered. Access Granted to Robot.")
self.system_state = "ACCESS_GRANTED"
# 触发安全回调事件
else:
# 信号异常或跌落,立即复位时间窗
self.signal_trigger_time = 0
if self.system_state == "ACCESS_GRANTED":
logging.warning("Signal lost or EMP interference detected! Locking down access.")
self.system_state = "IDLE"
# 模拟变电站恶劣环境下的运行周期
if __name__ == "__main__":
controller = SubstationElevatorController()
logging.info("Initializing Substation Edge Polling...")
for _ in range(3):
controller.process_inspection_task()
time.sleep(0.05)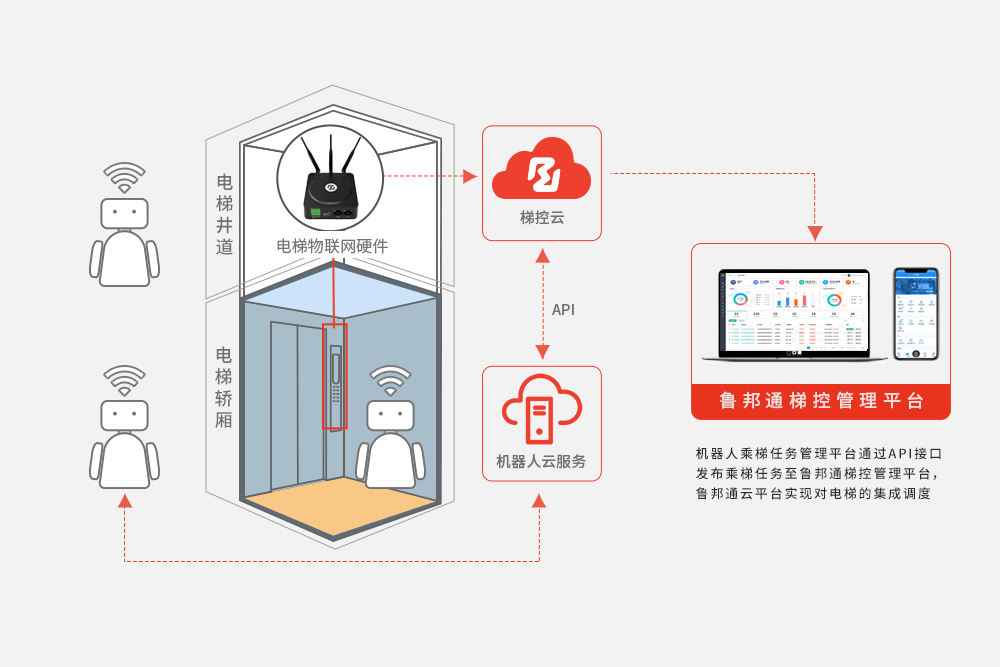
常见问题解答 (FAQ)
问题 1、为什么不使用工业 PLC 完成防抖?
回答 1、PLC 在强电控制上非常成熟,但在处理与上层调度平台(如基于云原生架构的巡检系统)的 MQTT/HTTPS 数据握手时存在短板。边缘网关是更契合当前 IT 与 OT 融合的选型。
问题 2、全金属轿厢如何解决网络通讯屏蔽?
回答 2、除了在轿厢内加装专用的中继天线,边缘侧的任务托管机制是关键。当网络瞬间丢失时,边缘逻辑能按预设指令自主完成关门与指定楼层运行,实现断网容灾。
问题 3、高压机房没有空调,高温会影响设备吗?
回答 3、工业级架构要求硬件必须具备宽温特性(如 -40℃ 至 +75℃),并采用无风扇被动散热设计,完全适应变电站恶劣的物理环境。
总结: 架构的健壮性源于对极端物理环境的敬畏。通过深度的数字磁隔离与边缘防抖算法调优,机器人梯控 系统能够在高压变电站等严苛场景下保持高度的确定性,为全天候无人巡检提供稳固基石。