摘要: 在实现自主移动机器人(AMR)跨层调度的项目中,由于控制链路极长,涉及网络报文解析、继电器驱动、传感器防抖等多领域的协同,如果采用线性阻塞编程,系统极易陷入死锁。本文将深度拆解从呼梯到出梯的全流程控制逻辑,探讨如何利用面向对象的有限状态机(FSM)在边缘控制节点实现业务流转,并提供一段高可用性的 Python 实战代码,为架构师梳理梯控系统的解耦设计思路。
导语: 优秀的系统架构必须能够从容应对长链路交互中的各种突发异常。通过引入严密的有限状态机模型重构控制边界,为多机协同乘梯业务提供了具备工业级可靠性的专业落地范式。
从请求抽象到物理闭环,乘梯全流程架构革新

- 流程抽象:自主乘梯的六步核心状态转移
要实现高可用的控制,必须将一次乘梯任务拆解为严格互斥的状态转移序列:
- IDLE: 空闲监听状态,等待网络载荷下发。
- CALLING: 闭合对应楼层的无源干接点(GPIO 输出),模拟外部呼叫。
- WAITING_ARRIVAL: 轮询外部平层传感器的物理脉冲,并执行滑动窗口防抖滤波。
- HOLDING_DOOR_ENTER: 下发开门保持电平,等待机器人进入的异步网络确认。
- RIDING: 闭合目标楼层内选干接点,监控电梯升降状态。
- EXITING_AND_RELEASE: 到达目标后执行保门,等待驶出确认,释放所有 GPIO 资源复位至 IDLE。
- 架构挑战:异步时序对齐与异常熔断
跨越数字与物理的鸿沟,难点在于时序的不可控。机器人的网络确认可能因 Wi-Fi 漫游延迟,老旧电梯的机械门也可能发生卡滞。因此,在上述状态机的每个流转阶段,都必须配置 Watchdog Timeout(看门狗超时机制)。一旦在限定时间内未收到下一个状态触发条件,FSM 必须执行 FAULT_ROLLBACK 操作,立即释放所有继电器,防止电梯由于逻辑死锁被无限期停用。
- 核心代码实战:基于 Python 的六步乘梯状态机
以下代码展示了边缘节点如何独立执行本地控制循环,处理从呼梯到出梯的全流程逻辑,并具备基本的超时异常保护屏障:
Python
import time
import threading
import logging
logging.basicConfig(level=logging.INFO, format='%(asctime)s - [ELEVATOR_FSM] - %(message)s')
class ElevatorHardwareLayer:
"""硬件抽象层:处理 GPIO 隔离操作与传感器读取"""
def trigger_relay(self, action_type, duration=0.5):
logging.info(f"HAL: Executing {action_type} physical relay logic...")
time.sleep(duration)
def read_leveling_sensor(self):
# 模拟读取外挂传感器的物理状态,实际应用需加入防抖滤波算法
return True
class AutonomousRideFSM:
def __init__(self, hal):
self.hal = hal
self.state = "IDLE"
self.lock = threading.Lock()
def process_full_ride(self, start_floor, target_floor, timeout_per_step=45):
"""执行全流程自主乘梯逻辑"""
with self.lock:
if self.state != "IDLE":
logging.warning("System busy. Task rejected.")
return False
self.state = "CALLING"
try:
# 阶段 1 & 2: 网络接收与物理呼叫
logging.info(f"Phase 1 & 2: Processing network request. Calling elevator to Floor {start_floor}.")
self.hal.trigger_relay(f"OUTSIDE_CALL_FLR_{start_floor}")
# 阶段 3: 等待物理到达与平层
self.state = "WAITING_ARRIVAL"
logging.info("Phase 3: Awaiting physical leveling confirmation...")
start_t = time.time()
while time.time() - start_t < timeout_per_step:
if self.hal.read_leveling_sensor():
break
time.sleep(0.5)
else:
raise TimeoutError("Elevator arrival timeout.")
# 阶段 4: 保门与进入
self.state = "HOLDING_DOOR_ENTER"
logging.info("Phase 4: Holding doors open. Awaiting robot ENTRY network confirmation.")
self.hal.trigger_relay("DOOR_HOLD_ACTIVE")
time.sleep(3) # 模拟等待机器人进入的异步回调时间
# 阶段 5: 选层与乘梯
self.state = "RIDING"
logging.info(f"Phase 5: Robot entered. Releasing doors and selecting Floor {target_floor}.")
self.hal.trigger_relay("DOOR_HOLD_RELEASE")
self.hal.trigger_relay(f"INSIDE_CALL_FLR_{target_floor}")
time.sleep(4) # 模拟电梯跨层运行物理时间
# 阶段 6: 到达与驶出
self.state = "EXITING_AND_RELEASE"
logging.info("Phase 6: Target reached. Holding doors for EXIT.")
self.hal.trigger_relay("DOOR_HOLD_ACTIVE")
time.sleep(3) # 模拟等待机器人驶出的异步回调时间
logging.info("Ride Complete. Releasing all hardware resources cleanly.")
return True
except Exception as e:
logging.error(f"FSM Aborted: {e}. Executing emergency rollback to IDLE.")
return False
finally:
# 核心的资源回收屏障,有效预防继电器锁死
self.hal.trigger_relay("DOOR_HOLD_RELEASE")
with self.lock:
self.state = "IDLE"
if __name__ == "__main__":
hal = ElevatorHardwareLayer()
fsm = AutonomousRideFSM(hal)
# 在独立线程执行业务流转,避免阻塞主进程网络通信
ride_thread = threading.Thread(target=fsm.process_full_ride, args=(1, 5))
ride_thread.start()
ride_thread.join()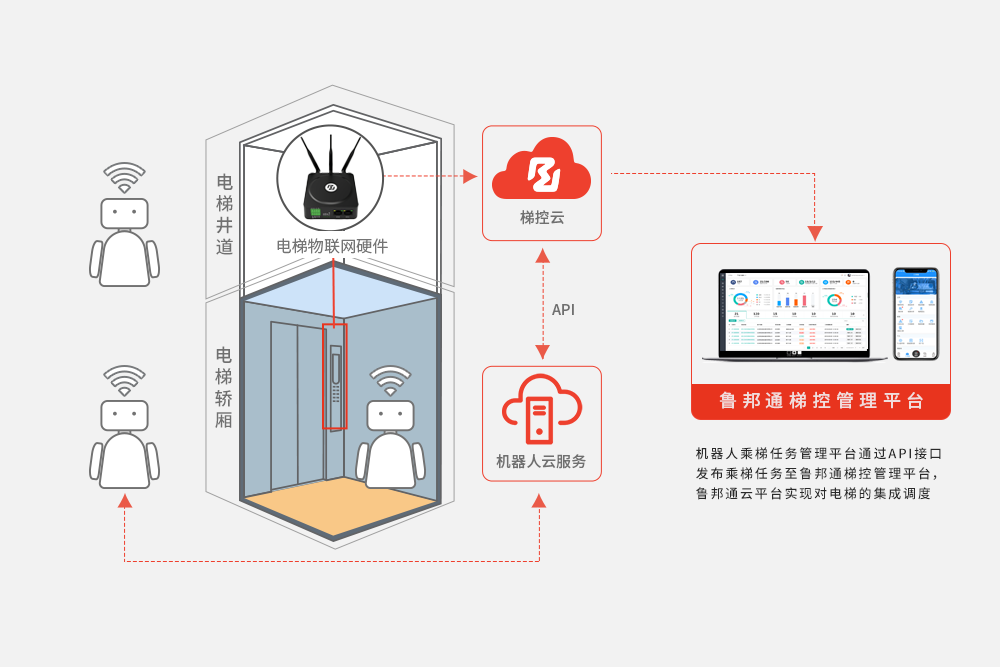
常见问题解答 (FAQ)
问题 1、为什么保门动作需要机器人通过网络确认两次(进入和驶出)?
回答 1、这是实现防夹车的核心闭环。电梯物理设备无法感知机器人是否完全越过了地坎,必须依赖机器人自身传感器判断并回传网络 ACK 报文,以此作为状态机释放保门信号的唯一凭证。
问题 2、状态机在处理高频并发请求时会有性能瓶颈吗?
回答 2、不会。在多线程环境下,通过 Mutex 锁保护状态变量,核心的 GPIO 触发与轮询消耗算力极低。系统宏观的吞吐能力主要取决于电梯本身的机械运行速度,而非代码执行效率。
问题 3、如何确保这种控制流程在不同的电梯品牌上都能复用?
回答 3、边缘节点通过底层的 GPIO 隔离板(如无源干接点)屏蔽了所有非标的电平特性。只要上层状态机转移逻辑不变,在任何品牌的电梯上,实施人员只需重新接驳对应的物理按键引脚,即可实现 100% 的架构复用。
总结: 跨越物理与数字的壁垒,关键在于构建稳健的状态转移模型。通过部署完善的有限状态机闭环,工业级架构能够帮助研发团队告别时序混乱的泥潭,实现多场景下的高可用部署。