0 前言
我们在上一节总结了观测器自身的一些限制,明确了需要优化的方向。那么在这一小节来学习别人都是怎么处理这个问题的。
1 方法学习
经过在IEEE上搜索相关问题,找到了一篇值得阅读的文章。
Model-Free Predictive Current Control of PMSM Using Modified Extended State Observer
这片文章提出一种改进型无模型预测电流控制(M‑MFPCC)策略,该策略集成了改进型扩张状态观测器 Modified Extended State Observer**(MESO)**。其目标是抑制由逆变器非线性及其他系统扰动所导致的转矩脉动,并减小电流畸变。
**所提观测器能够以单位增益、零相位滞后对扰动进行精确观测。通过对观测器增益进行自适应更新,可实时跟踪扰动频率,并在不同工况下维持良好的噪声抑制性能。**所提 M‑MFPCC 方法无需额外获取逆变器非线性信息,也无需额外参数整定,即可有效消除高频谐波扰动。
实验结果验证了该方法在不同负载工况下抑制电流总谐波畸变率(THD)与转矩脉动的有效性。
1.1 文章改进分析
第一个更改:对超局部模型的更改;

第二个更改:对观测器方程整体更改;
第三个更改:观测器增益的匹配修正
文章整体的改进思路是将高频扰动作为一个增加项加入到超局部模型中。这个属于是内模控制的一种。
1.2 核心原理分析
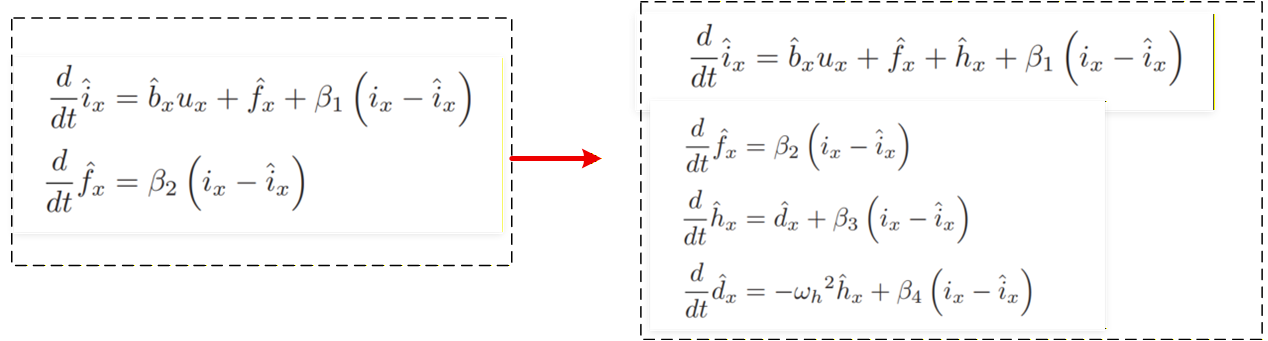
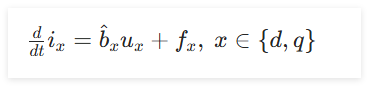
我们上面公式的左侧是传统ESO取得的效果。这个式子本身始终是一阶 的,是电流的一阶微分方程,不会因为加了扰动就改变阶数。其中fx是集总慢变扰动 ,打包了电机参数摄动、d/q 轴交叉耦合、反电动势、逆变器非线性的低频平均效应等,核心特点是变化速度远低于电流环带宽,可近似为慢变信号。
而右侧是加入高频谐波扰动后的扩展超局部模型
新增的 hx 是逆变器死区、管压降非线性带来的高频周期性谐波扰动, 典型为 6k±1 次谐波,如 5/7/11/13 次等谐波,它的核心特点是快变、正弦 / 余弦周期特性,这一点实际是完全不满足传统fx的慢变假设。整体逻辑如下:
原始ESO ------ 集总扰动 ------ 基于慢变假设 ------ 无法观测高频扰动
改进ESO ------ 低频扰动+高频扰动 ------ 低频基于慢变假设 + 高频基于内模原理 ------ 全局观测
第二个关键的公式是高频扰动的精确数学模型,这个公式容易被理解为超局部模型的阶数提升,但是其实不是的,这就是高频扰动的模型。
我们这里可能需要回顾一下内模观测的一点原理,有兴趣的同学可以深入的查询一下相关支撑文献。整个观测器的核心其实就是自动控制理论的内模原理。
要实现对某一类扰动的无静差、零相位滞后、单位增益的完全观测 / 补偿,观测器 / 控制器中必须包含该扰动的内模。
换句话说**,就是观测器内部含有扰动本身满足的精确微分方程,最为简单的是最小阶线性微分方程。** 如果把这种原理做一个比喻:++就好像我们要制止荡起来的秋千,通过我们观察所感知到的秋千大概荡多快,荡多高,选择在最高点的地方施加推力。那样就能最快将秋千给停下来。假如不知道这个秋千荡多快、荡多高,乱推乱拉,那么就会让秋千一直乱荡。++
在dq轴中的高频扰动是基频倍数次的正弦波,因此是满足以下公式:
经过一阶求导可得:
其二阶微分满足:

可以看到,正弦信号的最小阶线性微分方程就是二阶的 ,没有任何近似。说的玄乎一些,从自动控制原理的线性系统章节的知识描述:一阶微分方程只能描述指数变化的信号,无法描述周期振荡的正弦信号,而正弦信号是二阶线性系统的无阻尼振荡模态,无法用一阶线性微分方程精确描述。
1.3 其他有价值的分析
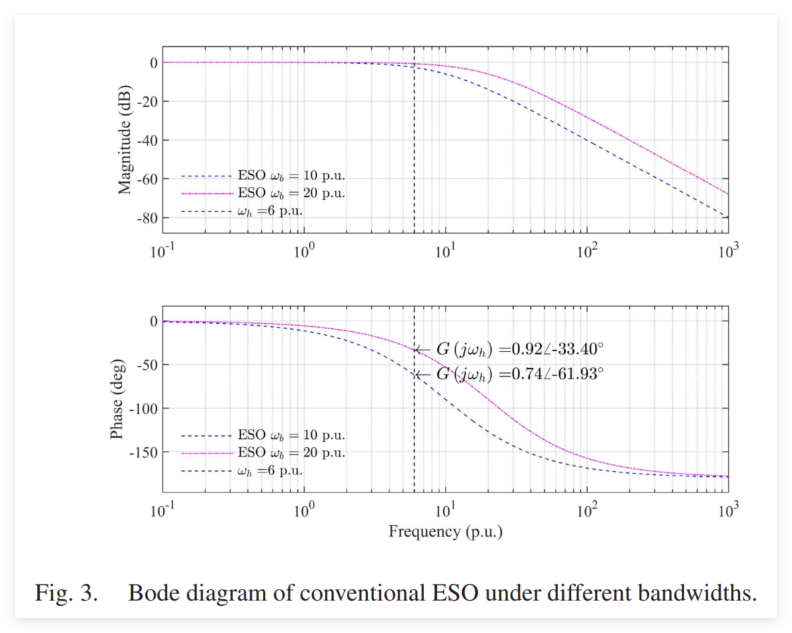
A. 文章以伯德图的形式分析了传统ESO对高频扰动造成的相位延迟和增益衰减。
如下图所示,图中标幺化了基频,当ESO的带宽为10倍基频时,其幅值衰减为原始值的0.74倍,相位滞后 61.93°;当ESO带宽为20倍基频时,其幅值衰减为原始值的0.92倍,相位滞后33.40°。这个数值是很有意义的,它明确的表征了现有ESO对高频扰动观测能力的不足,这个滞后的、幅值衰减的扰动被丢入观测器,是无法取得较好的抑制效果的。
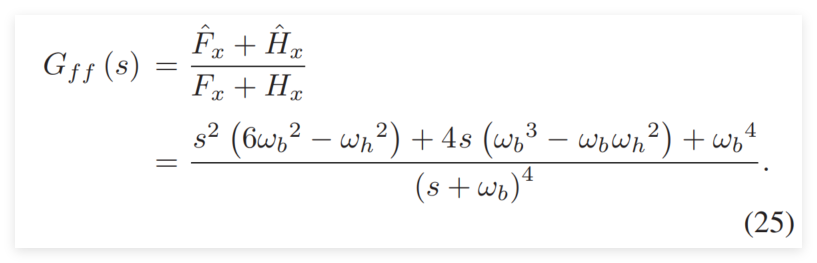
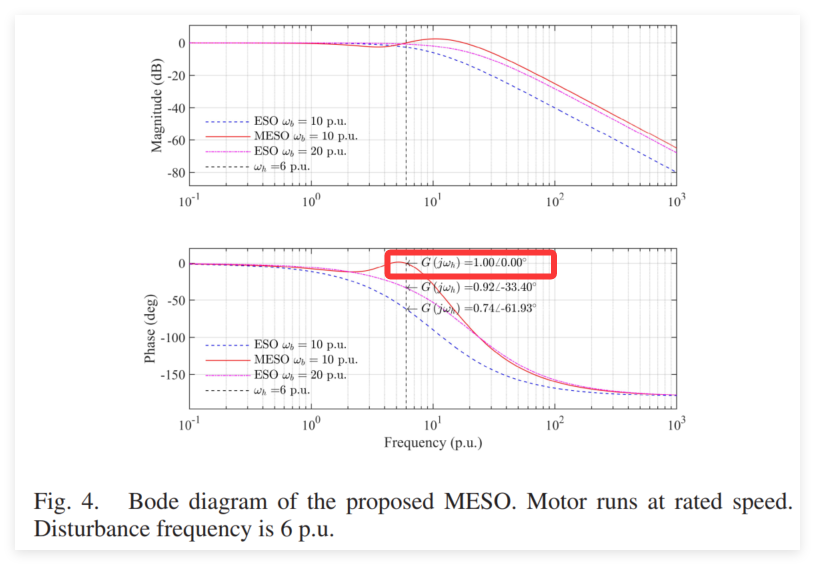
B. 文章推导证明了内模控制所取得的零相位滞后、单位增益的效果。
文章首先推导了观测器的传递函数:
然后给出了在六次谐波出的增益和相位:
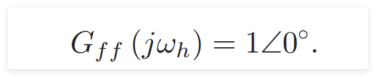
这是很具有实际价值的,因为从这个角度作者阐述了一个非常重要的观点,这个观测器对高频扰动的观测是不需要额外的增益的。我相信很多同志听说过这个PR/PIR谐振抑制器,它也具备非常奈斯的谐波抑制效果,但是它的增益需要手调,而且不同工况增益不一样,调大了反而会由反作用,例如恶化动态性能。而文章所设计的这种方法则不需要去调整这个增益。文章从bode图角度对其进行了说明。我个人是觉得这是一个很好的设计。
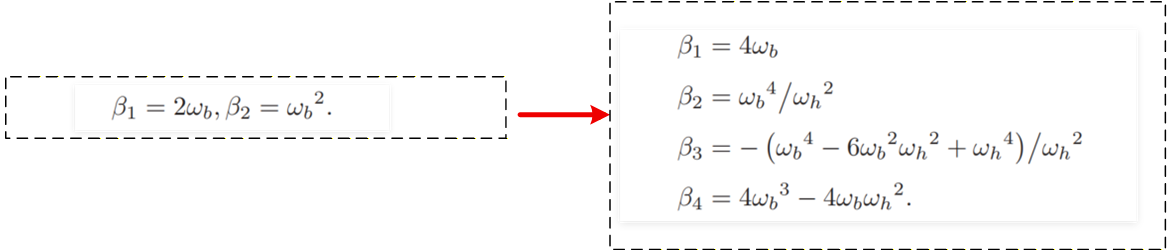
C. 文章给出了参数设定公式
在原文中,给出了具体的观测器中参数设计的公式,如下所示:
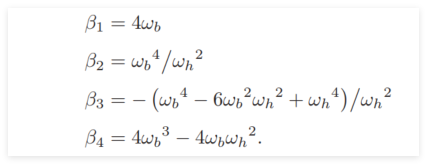
这个是在复现过程中非常关键的信息。但是具体如何推导过来的,文章好像没有具体的介绍,这个还是值得我们探究一下。
1.4 文章的实验设计
实验结果我就不全放了,挑最重要的放置。这个东西的价值在于我们去学习如何评定一个算法是否有效,从什么维度什么指标去评价算法的有效性。
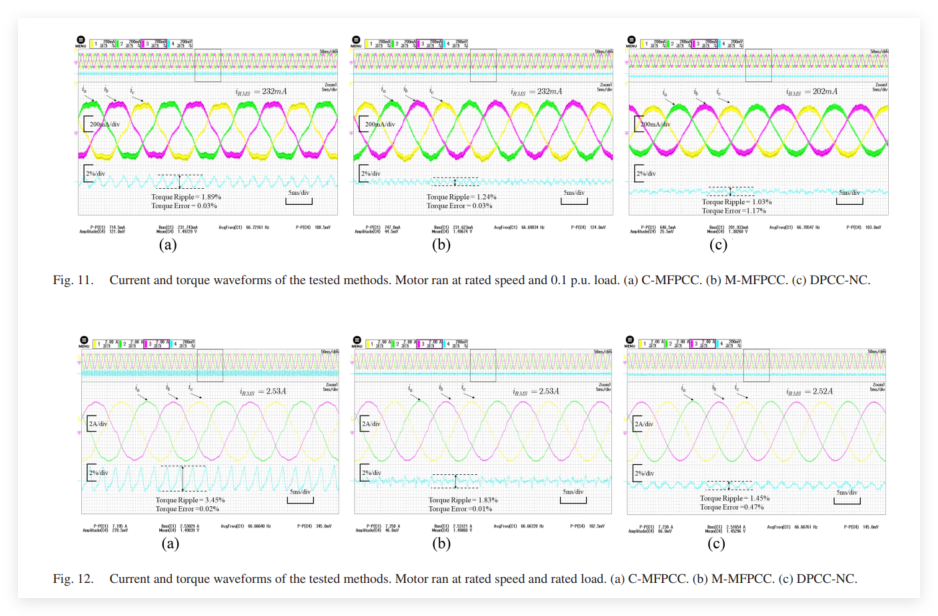
对比对象:带非线性补偿的DPCC、MF-ESO 与 所提方法 MF-MESO;
对比的实验包括以下几个:
(1)参数准确情况下,额定转速、额定负载工况下,对比相电流THD、转矩波动大小、转矩指令跟踪误差;
(2)参数准确情况下,额定转速、10%额定负载工况下,对比相电流THD、转矩波动大小、转矩指令跟踪误差;
(3)参数不准确(原始电感5.97mH,设置电感为 9.95mH,比例为60%),额定转速、额定负载工况下,对比相电流THD、转矩波动大小、转矩指令跟踪误差;
(4)参数不准确(原始电阻 3.2 欧,设置电阻为 2.1 欧,比例为150%),额定转速、10%额定负载工况下,对比相电流THD、转矩波动大小、转矩指令跟踪误差;
(5)参数准确情况下,静止、10%额定转速、50%额定转速、80%额定转速、100%额定转速在0-100% 以百分之10%为间隔额定负载的转矩波动大小。
2 仿真复现
2.1 参数准确仿真
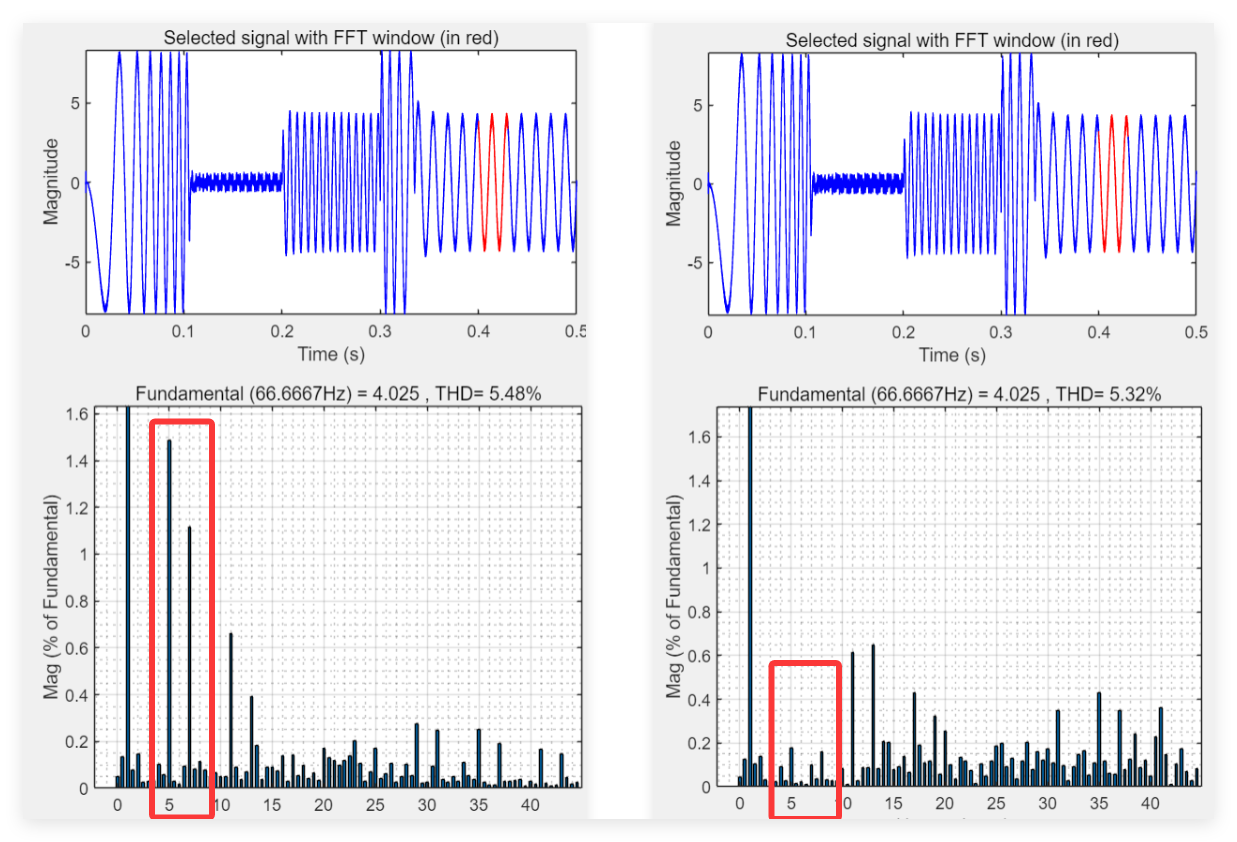
仿真复现结果与原始的ESO对比如下所示。可以看到5次谐波和7次谐波得到了明显的抑制,同时电流THD也明显变小。(这个变小好像也就那么一点点大概在0.16%的水平,可能是因为原本谐波占比就不大,抑制之后取得的效果也就较小。如果谐波幅值较大的话,此时改善效果应该会更加明显。)。虽然5次和7次谐波被明显抑制,但是高频部分的谐波相对明显更大,13次谐波明显上升,还包括更高频谱的谐波幅值都不同程度上升。
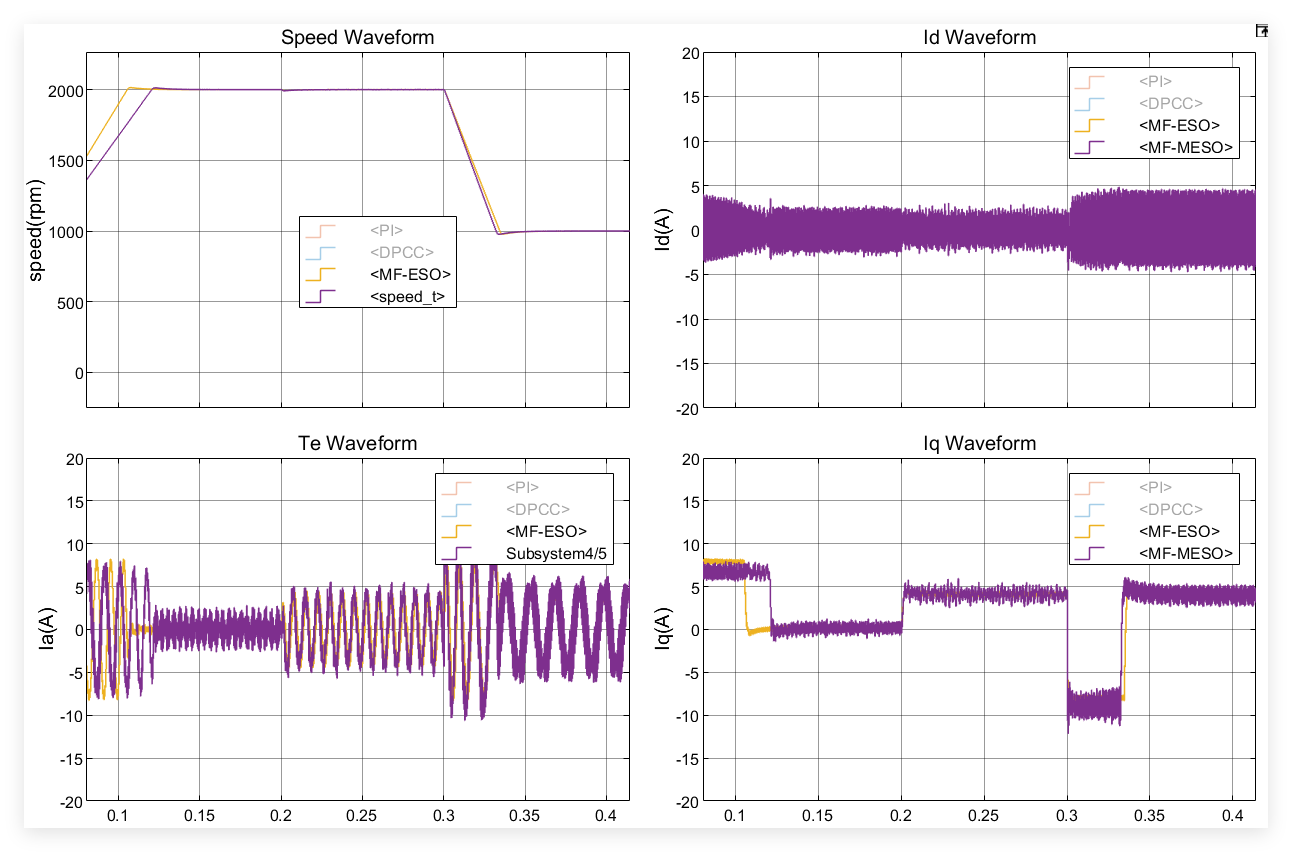
电流阶跃指令跟随的对比如下,仿真条件均设置带宽参数为5000rad/s,其跟随速度即上升时间相对来说更快,但是也存在明显的超调现象,恢复到给定值的时间即调节时间基本一致。
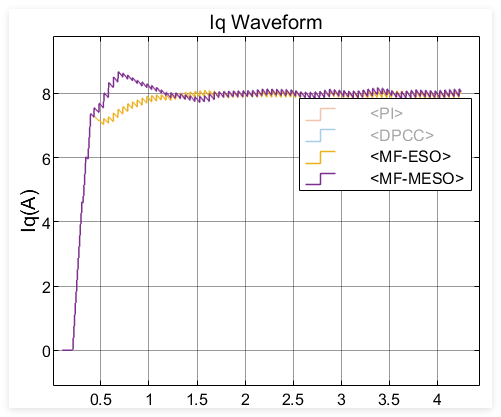
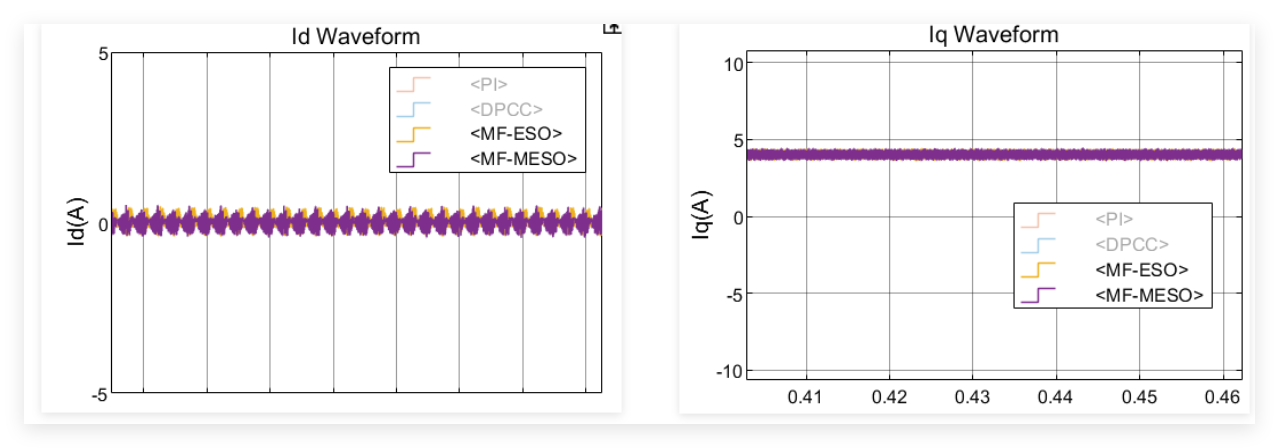
从稳态电流波动幅值的角度考虑,MF-ESO的idiq电流波动大小分别为0.85A和0.79A;MF-MESO的电流波动分别为0.92A和0.82A,这个幅值的变化并不明显。
2.2 参数不准确仿真
仿真标称电感设置为原始值的1.3倍,观察以上指标的仿真结果。紫色的时MESO的仿真结果,可以看到它这个dq轴电流振荡幅值明显增大。相电流中杂波也是非常多。
对其相电流FFT分析结果对比如下。MESO的电流THD约为62.24%,而二阶的ESO电流THD为5.37%,基本和参数准确时效果一致。从仿真结果上看传统二阶的ESO的参数鲁棒性还是更强一些,然而在论文中参数鲁棒性却很好,这个可能其中还存在一些问题。
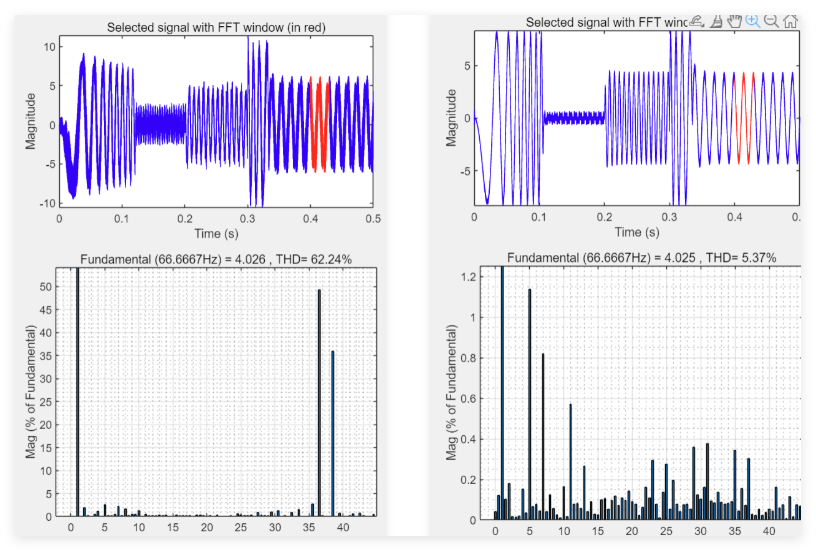
从仿真结果看取得的参数鲁棒性似乎并没有原文中那么理想。
3 总结
今天复现了一篇2025年的MF-MESO的论文,论文应用了内模远离改善原本的ESO,取得了较好的谐波抑制效果。这个方法还是挺有意思的,完全从观测器的角度对性能进行优化,问题定位明确,解决思路对标,实验结果闭环,是一个较为完整的工作。但是参数鲁棒性还是需要进一步探究一下。