目录
[3.1 MIMO杂波信号模型](#3.1 MIMO杂波信号模型)
[3.2 杂波协方差矩阵的稀疏求解](#3.2 杂波协方差矩阵的稀疏求解)
[3.3 稀疏字典构造](#3.3 稀疏字典构造)
本文提出基于OMP正交匹配追踪和稀疏字典构造的机载MIMO雷达杂波谱恢复算法。针对传统稀疏字典存在的网格失配问题,通过沿杂波脊线及其垂直方向构建网格,从源头提高杂波谱恢复精度。算法建立了MIMO杂波信号模型,推导了杂波协方差矩阵的稀疏求解方法,并详细阐述了基于先验知识的稀疏字典构造流程。
1.引言
机载MIMO雷达的空时自适应处理是杂波背景下检测运动目标的核心技术,其性能依赖于精准的杂波协方差矩阵估计。但实际环境中杂波的非均匀性导致训练样本数难以满足RMB准则要求,稀疏恢复技术的引入有效解决了这一问题,却因传统稀疏字典存在网格失配问题影响杂波谱恢复精度。针对该问题,本文提出基于OMP正交匹配追踪和稀疏字典构造的杂波谱恢复算法。
2.算法测试效果
3.算法涉及理论知识概要
3.1 MIMO杂波信号模型
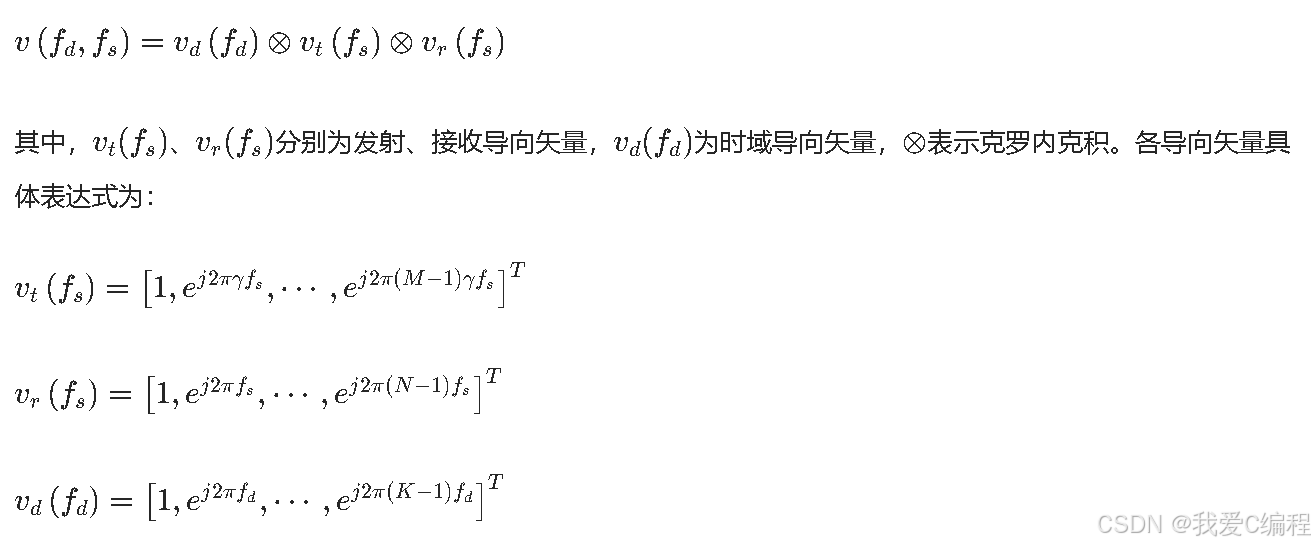
机载MIMO雷达采用均匀线阵体制,设发射阵元数为M、接收阵元数为N,1个相干处理间隔内发射K个脉冲,脉冲重复频率为fr,工作波长为λ,发射与接收阵元间距均为dr=λ/2。杂波块的空间频率fs与多普勒频率fd由其俯仰角φ、方位角θ及载机速度V决定,对应的空时导向矢量为:
式中γ为发射与接收阵元间距之比。空间频率与多普勒频率的物理表达式为:

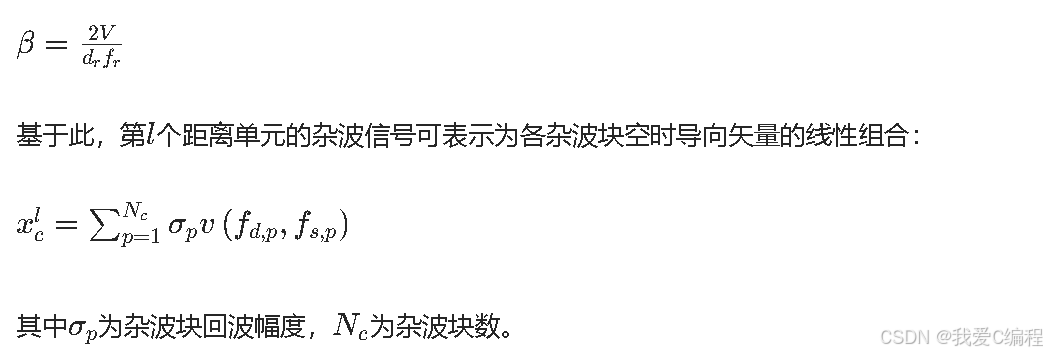
正侧视条件下,杂波脊线的多普勒频率与空间频率之比为折叠系数β,可由先验知识精确求得:
3.2 杂波协方差矩阵的稀疏求解
杂波在空时二维平面具有稀疏性,可由超完备字典近似表示为xc=ψσ,其中ψ为字典矩阵,σ为稀疏参数矢量。稀疏恢复问题转化为l0范数最小化问题:

3.3 稀疏字典构造
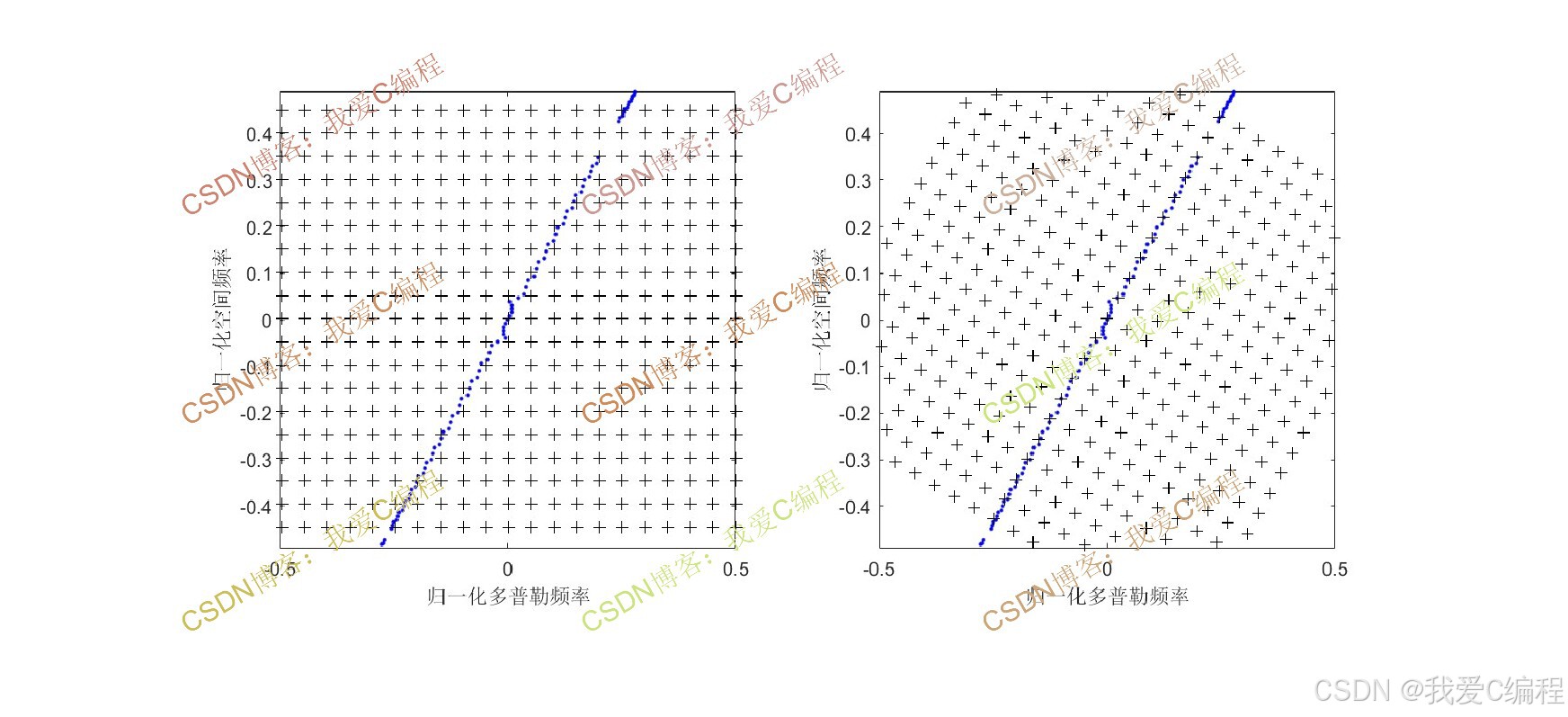
利用先验知识确定精准杂波脊线,沿脊线方向及其垂直方向构建网格,通过基向量组合确定网格节点的空时坐标,最终削减超范围原子得到最终字典,从源头消除网格失配。正侧视条件下杂波脊线为直线,斜率k=1/β可精准估计。具体构造步骤如下:
步骤1:确定核心参数与折叠系数;
步骤2:定义网格基向量与模值;
步骤3:确定网格节点的空时坐标;
步骤4:削减字典范围以保证精度;
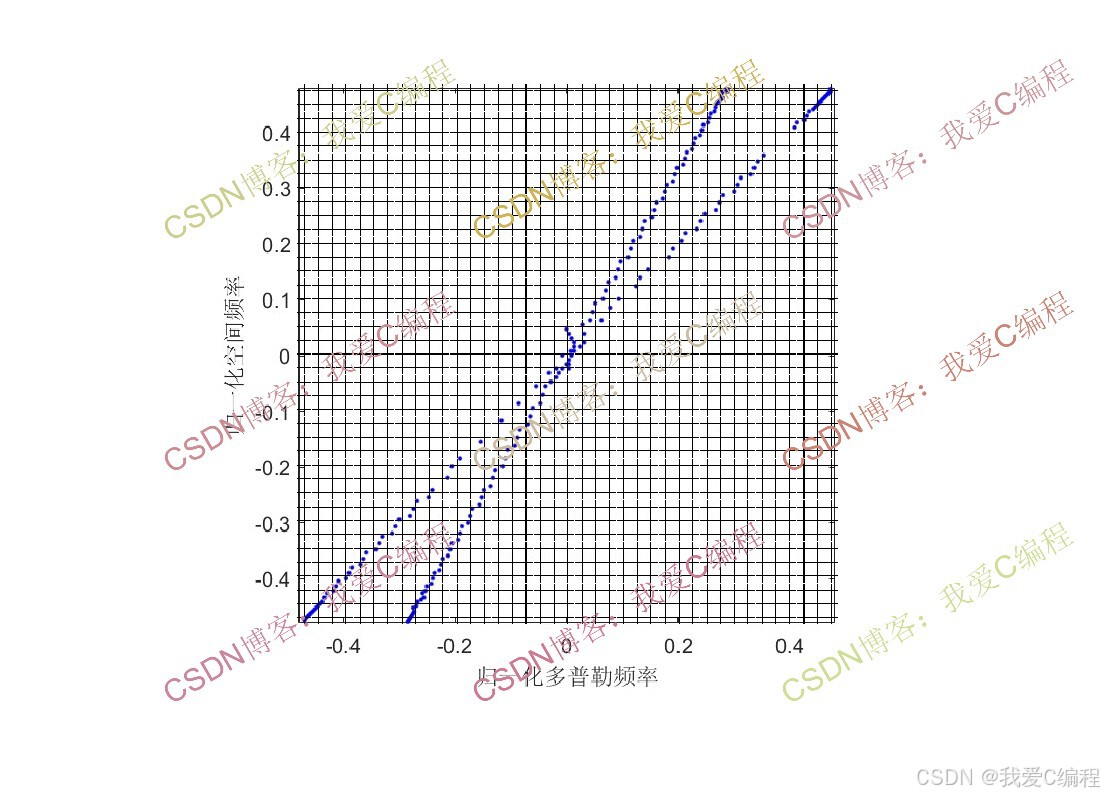
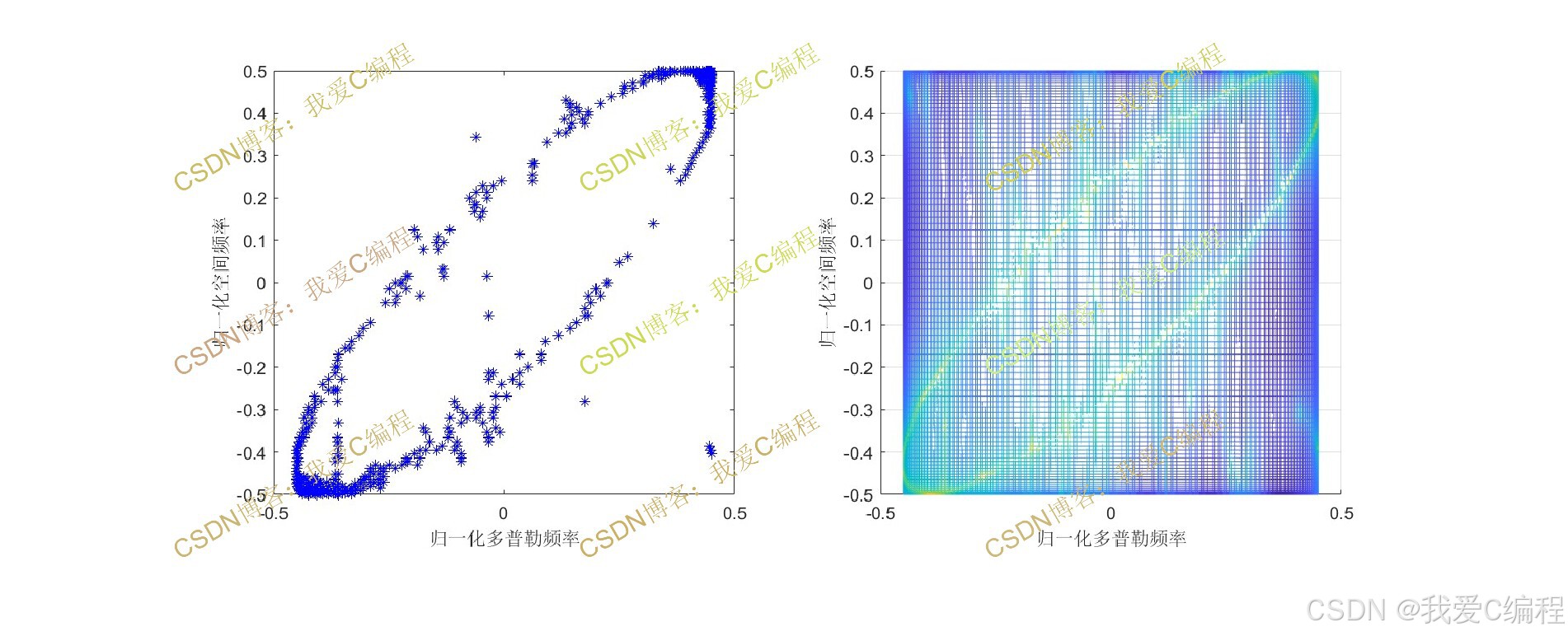
当折叠系数β=0.7时,传统字典的网格节点与杂波脊线存在明显偏移,网格失配问题突出;而所提字典沿杂波脊线及垂直方向构建网格,杂波脊线精准落在网格节点上,从源头消除了网格失配。
4.MATLAB核心程序
%杂波协方差矩阵的求解
R = zeros(M*N_zy,M*N_zy);
S = zeros(M*N_zy,Cm);
deltas = 10^(CNR/10)*(randn(1,Cm)+j*randn(1,Cm))/sqrt(2);
for ii = 1:Cm
S(:,ii) = kron(Va_fs(:,ii),Vb_fs(:,ii));
R = R + deltas(ii).*(S(:,ii)*S(:,ii)');
end
%干扰协方差矩阵
R = R +eye(M*N_zy);
%OMP
for ii = 1:M*N_zy
Ys(1:M*N_zy,ii)=func_omp(R(:,ii),S(:,ii)*S(:,ii)',150);
end
invR = inv(Ys);
invR = invR.*(1+randn(size(invR))/100);
Pmn = zeros(Cm,Cm);
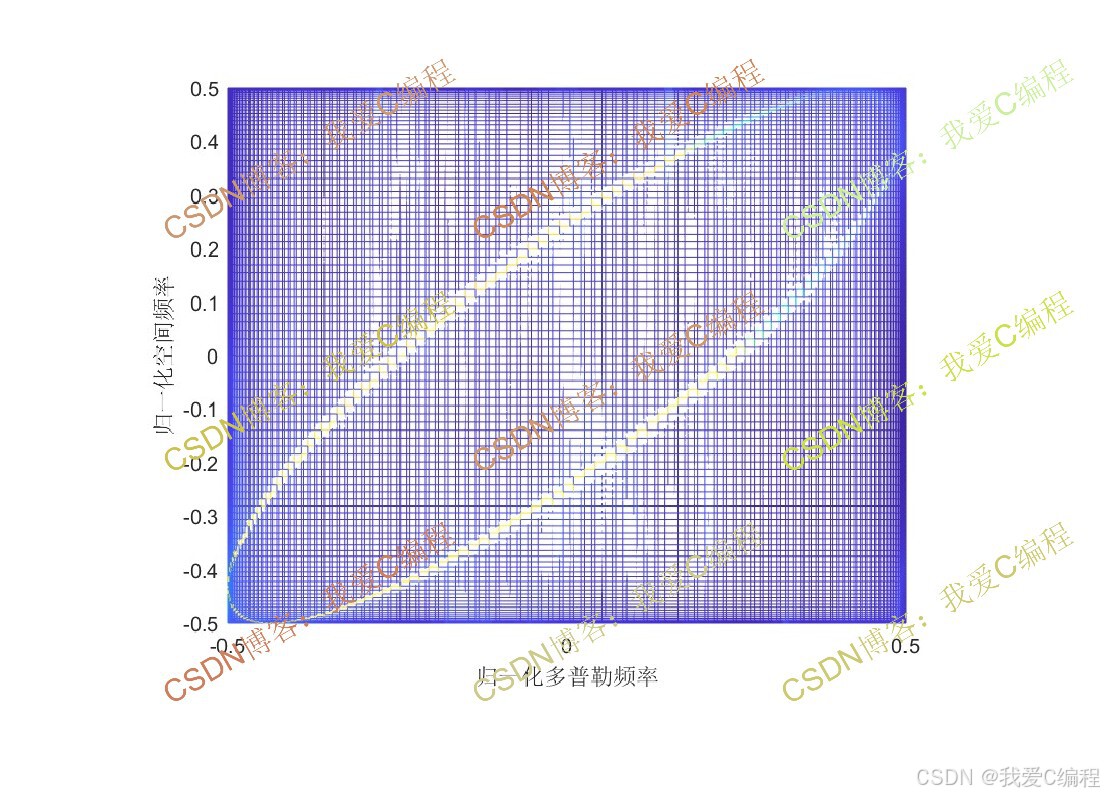
%杂波空时功率谱
for ii = 1:Cm
for jj = 1:Cm
SS = kron(Va_fs(:,ii),Vb_fs(:,jj));
Pmn(ii,jj) = 1./(SS'*invR*SS);
end
end
figure
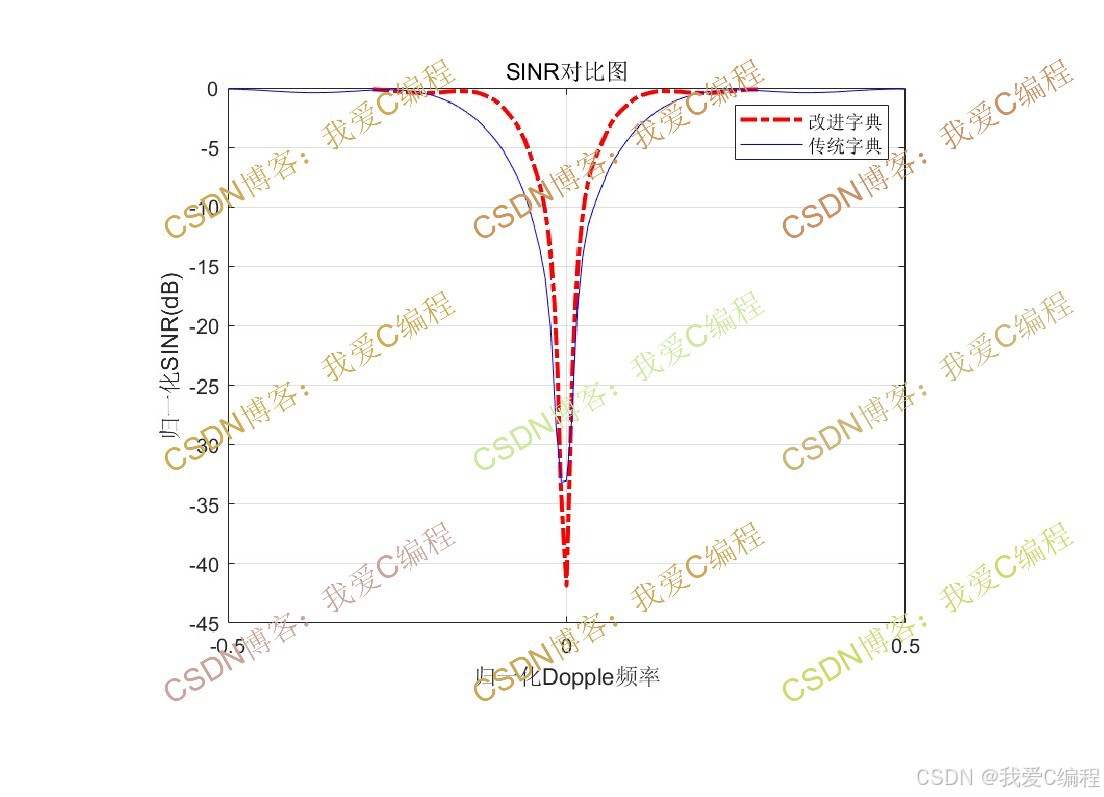
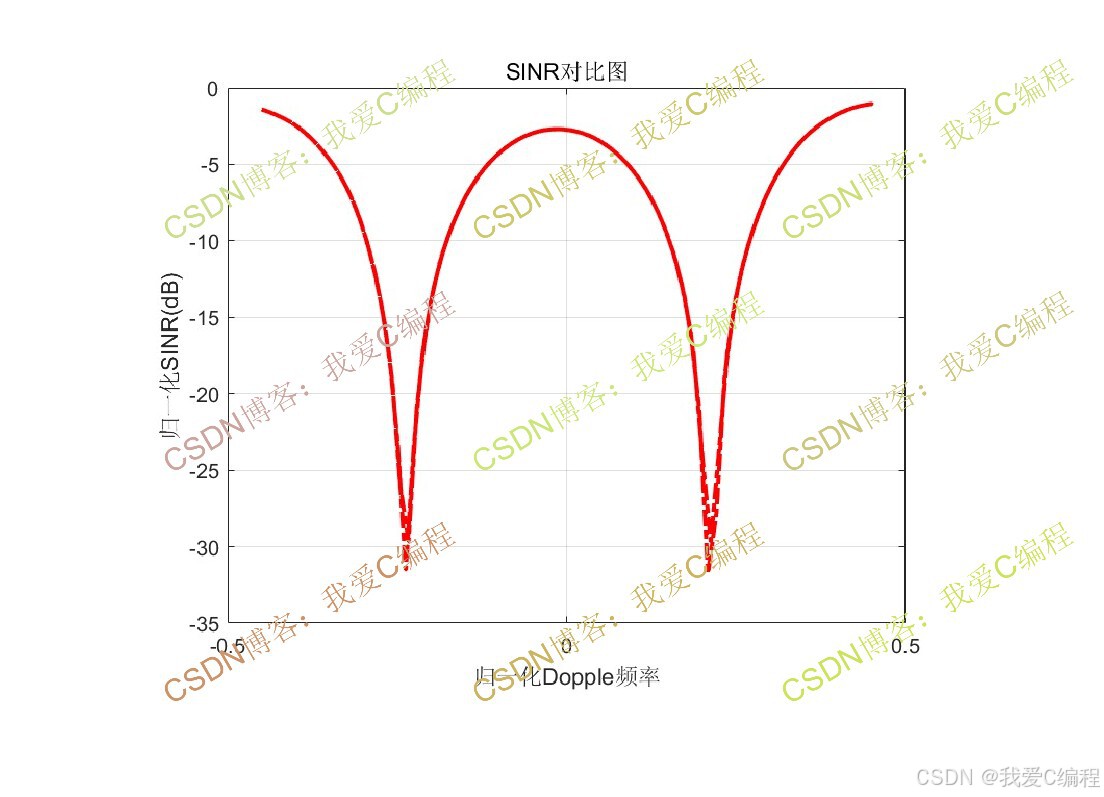
plot(vfd1/pi,10*log10(abs(SINR(floor(length(vfd1)/2),:))),'r-.','linewidth',2);
hold on
xlabel('归一化Dopple频率');
ylabel('归一化SINR(dB)');
grid on
title('SINR对比图');
% legend('改进字典','传统字典');
xlim([-0.5,0.5]);
save OMP.mat
01_240m5.完整算法代码文件获得
完整程序见博客首页左侧或者打开本文底部GZH名片
(V关注后回复码:X125)
V