Kevin Black, Noah Brown, Danny Driess, Adnan Esmail, Michael Equi, Chelsea Finn, Niccolo Fusai, Lachy Groom, Karol Hausman, Brian Ichter, Szymon Jakubczak, Tim Jones, Liyiming Ke, Sergey Levine, Adrian Li-Bell, Mohith Mothukuri, Suraj Nair, Karl Pertsch, Lucy Xiaoyang Shi, James Tanner, Quan Vuong, Anna Walling, Haohuan Wang, Ury Zhilinsky
https://physicalintelligence.company/blog/pi0
主要创新点:
- 基于预训练 VLM 和 Flow Matching 的新型通用机器人策略架构
- 对这个机器人基础模型的预训练/后训练方法的实验调查
Paper: https://arxiv.org/abs/2410.24164
Code: https://github.com/Physical-Intelligence/openpi
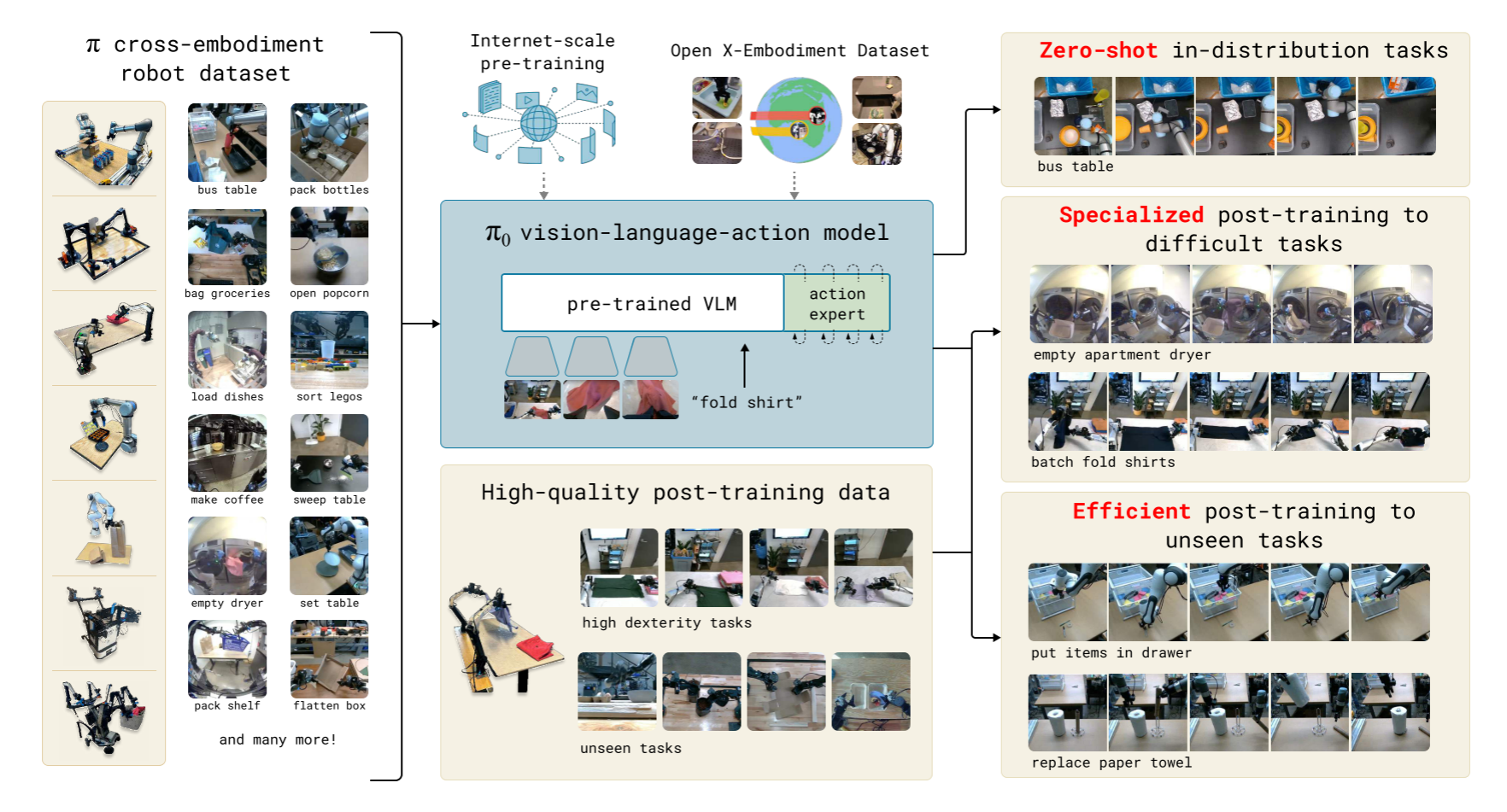
作为一个通用机器人策略,模型的核心结构是:一个预训练的 VLM,加上一个动作专家(Action Expert),后者通过 Flow Matching 生成连续动作。
Flow Matching 可以理解为 Diffusion 的一种变体。
VLM、LLM 等模型虽然已经取得了不少成果,但它们的输入输出始终停留在图片或语言层面,没法直接和物理世界产生交互。而 VLA 不同,它通过动作模块最终生成能控制机器人的动作序列,这些动作会转换成机器人的控制量,从而实现对真实世界的物理交互。
为什么先读这篇论文?更早的工作如 OpenVLA 的动作模块和 Pi0 的流匹配不太一样:OpenVLA 输出的动作序列是离散的(用自回归离散化的方式表示和生成动作),而 Pi 系列输出的动作是连续的。我了解到后面不少 VLA 模型(如 SmolVLA)都和 Pi 一样,用基于 Flow Matching 的动作专家来生成动作序列。所以我觉得 Pi0 作为 OpenPi 系列的开篇之作,更适合作为 VLA 入门的第一篇来学。
论文中引用了 Robert A. Heinlein 在 Time Enough for Love 中的一句话:A human being should be able to change a diaper, plan an invasion, butcher a hog, conn a ship, design a building, write a sonnet, balance accounts, build a wall, set a bone, comfort the dying, take orders, give orders, cooperate, act alone, solve equations, analyze a new problem, pitch manure, program a computer, cook a tasty meal, fight efficiently, die gallantly. Specialization is for insects.
大意是:只有昆虫才会专精于同一种技能,而人类应该学会各种通用的技能。
文章类比了 NLP 和 CV 领域的训练方法,认为先用高度多样化的数据对机器人做预训练,再对目标任务做微调,往往比直接在目标任务上训练更有效。实验结果也印证了这一点------迄今为止,预训练 + 微调依然是 VLA 领域的主流训练范式。
模型框架:
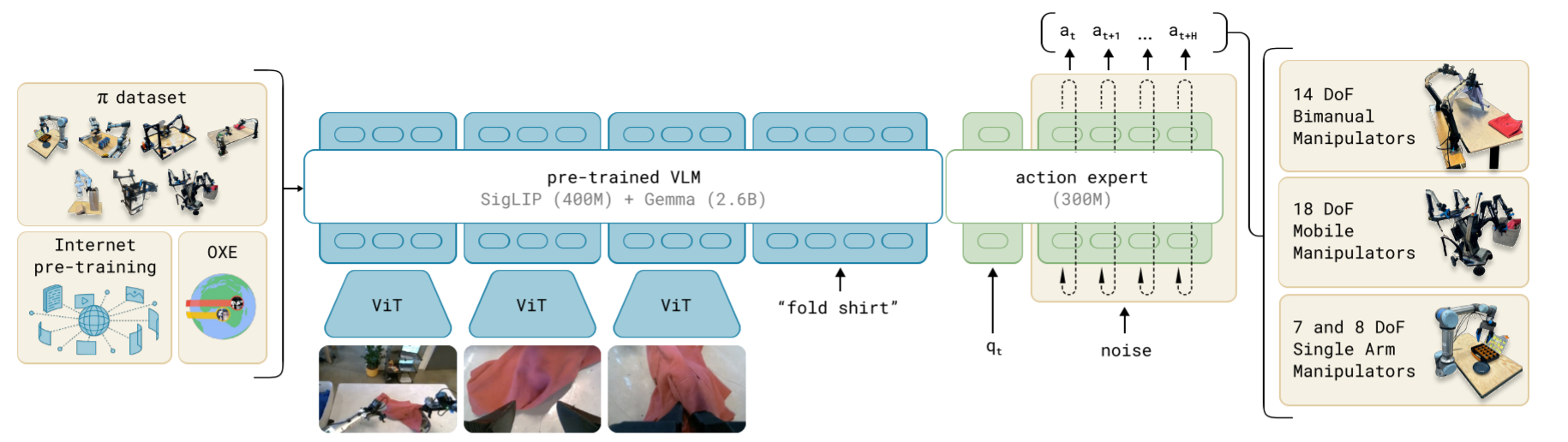
- 一个预训练的 VLM(基于 PaliGemma)
- 一个基于 Flow Matching 的 Action Expert
文中提到选 PaliGemma 作为 VLM 骨干,是因为它方便且相对较小(在规模和性能之间做了权衡),对机器人实时控制比较友好。不过提出的框架和任何预训练 VLM 都兼容。
架构灵感来自 Transfusion,它通过多个目标训练单个 transformer。
基于 Transfusion,他们发现给机器人专用的 tokens(动作和状态)单独用一组权重,效果会更好。这个设计有点像专家混合的两个元素:一个负责图像和文本输入,另一个负责机器人专用的输入输出,后者就是所谓的 Action Expert。
数据分布的建模如下:
p ( A t ∣ o t ) p({\mathbf{A}_t} | {\mathbf{o}_t}) p(At∣ot)
A t = a t , a t + 1 , ... , a t + H − 1 \mathbf{A}_t = \\mathbf{a}_t, \\mathbf{a}_{t+1}, \\dots, \\mathbf{a}_{t+H-1} At=at,at+1,...,at+H−1 表示未来的动作块(Action chunks),文中取 H = 50 H=50 H=50; o t \mathbf{o}_t ot 是观测值,包括:
- 多张 RGB 图像
- 语言指令
- 机器人本体的感觉状态
例如 o t = I t 1 , ... , I t n , ℓ t , q t \mathbf{o}_t = \\mathbf{I}\^1_t, \\dots, \\mathbf{I}\^n_t, \\ell_t, \\mathbf{q}_t ot=It1,...,Itn,ℓt,qt,其中 I t i \mathbf{I}^i_t Iti 是第 i 张图像, ℓ t \ell_t ℓt 是文本 tokens 序列, q t \mathbf{q}_t qt 是关节角度向量。 I t i \mathbf{I}^i_t Iti 和 q t \mathbf{q}_t qt 先通过对应的编码器编码,再通过线性投影层投影到与文本 token 相同的 embedding 空间。
动作块 A t \mathbf{A}t At 中的每个动作 a t ′ \mathbf{a}{t'} at′ 都对应一个由动作专家输出的 action token。训练时用 条件流匹配损失(Conditional Flow Matching Loss) 来监督这些 action tokens:
L τ ( θ ) = E p ( A t ∣ o t ) , q ( A t τ ∣ A t ) ∥ v θ ( A t τ , o t ) − u ( A t τ ∣ A t ) ∥ 2 , L^{\tau}(\theta) = \mathbb{E}_{p(\mathbf{A}_t|\mathbf{o}_t),q(\mathbf{A}_t^{\tau}|\mathbf{A}t)}\|\mathbf{v}{\theta}(\mathbf{A}_t^{\tau},\mathbf{o}_t) - \mathbf{u}(\mathbf{A}_t^{\tau}|\mathbf{A}_t)\|^2, Lτ(θ)=Ep(At∣ot),q(Atτ∣At)∥vθ(Atτ,ot)−u(Atτ∣At)∥2,
下面这段建议对照原文看,公式和背后的原理我也没完全吃透。下面是我问 AI 得到的解答,我尽量用比较好懂的方式整理了一下。
简单来说,pi0 并没有直接输出确定的动作数值,而是使用了一种叫做 流匹配(Flow Matching) 的生成式技术(类似于 Stable Diffusion 背后的扩散模型,但数学原理略有不同)来"生成"动作。
流程是:模型接收一个动作块(Action Chunk, A t \mathbf{A}_t At),即一系列连续动作,把它们转成 token 喂给专门的神经网络(Action Expert),然后训练这个网络,让它学会从"随机噪声"中恢复出"正确的机器人动作"。
公式 L τ ( θ ) L^{\tau}(\theta) Lτ(θ) 的核心含义是:让网络预测的向量场 v θ ( A t τ , o t ) \mathbf{v}_{\theta}(\mathbf{A}_t^{\tau},\mathbf{o}_t) vθ(Atτ,ot)去逼近真实的向量场 u ( A t τ ∣ A t ) = A t − ϵ \mathbf{u}(\mathbf{A}_t^{\tau}|\mathbf{A}_t) = \mathbf{A}_t - \epsilon u(Atτ∣At)=At−ϵ。简单说,就是教网络"在这个噪声状态下,应该往哪个方向走才能变成真实动作"。论文采用了一种简单的 线性高斯概率路径(Linear-Gaussian probability path),也叫最优传输(Optimal Transport),来描述从真实动作到噪声的过渡:
q ( A t τ ∣ A t ) = N ( τ A t , ( 1 − τ ) I ) q(\mathbf{A}_t^{\tau}|\mathbf{A}_t) = \mathcal{N}(\tau\mathbf{A}_t, (1-\tau)\mathbf{I}) q(Atτ∣At)=N(τAt,(1−τ)I)
τ \tau τ 是时间步,范围在 0,1: τ = 1 \tau=1 τ=1 对应真实动作, τ = 0 \tau=0 τ=0 对应纯噪声。"噪声动作" A t τ \mathbf{A}_t^{\tau} Atτ通过公式 A t τ = τ A t + ( 1 − τ ) ϵ \mathbf{A}_t^{\tau} = \tau\mathbf{A}_t + (1 - \tau)\epsilon Atτ=τAt+(1−τ)ϵ来计算。
具体在训练时,先随机采样一个噪声 ϵ \epsilon ϵ,然后把它和真实动作 A t \mathbf{A}_t At混合,得到一个"噪声动作" A t τ \mathbf{A}_t^{\tau} Atτ。随后计算目标向量场 u ( A t τ ∣ A t ) = A t − ϵ \mathbf{u}(\mathbf{A}_t^{\tau}|\mathbf{A}_t) = \mathbf{A}t - \epsilon u(Atτ∣At)=At−ϵ(表示从噪声回到真实动作的方向),并让网络输出 v θ ( A t τ , o t ) \mathbf{v}{\theta}(\mathbf{A}_t^{\tau},\mathbf{o}_t) vθ(Atτ,ot)去匹配这个目标 u \mathbf{u} u。
网络架构细节:
- 使用了 全双向注意力掩码 (Full bidirectional attention mask)。这意味着所有的动作 token 可以互相"看见"彼此(Self-Attention),而不是像语言模型那样只能看前面的词。这允许模型同时优化整个动作序列。
推理阶段 :从纯随机噪声 A t 0 ∼ N ( 0 , I ) \mathbf{A}_t^0 \sim \mathcal{N}(\mathbf{0}, \mathbf{I}) At0∼N(0,I)开始,用训练好的向量场一步步"积分"(Integrate),从 τ = 0 \tau=0 τ=0走到 τ = 1 \tau=1 τ=1。在这个过程中,使用了 前向欧拉法(Forward Euler integration):
A t τ + δ = A t τ + δ v θ ( A t τ , o t ) \mathbf{A}_t^{\tau+\delta} = \mathbf{A}t^{\tau} + \delta\mathbf{v}{\theta}(\mathbf{A}_t^{\tau}, \mathbf{o}_t) Atτ+δ=Atτ+δvθ(Atτ,ot)
公式的含义是:当前的动作 = 上一刻的动作 + 积分步长 × 网络预测的方向。
实验中只用了 10步 ( δ = 0.1 \delta=0.1 δ=0.1)。这意味着推理速度很快,不需要像某些扩散模型那样跑几十步。
KV Cache :这是一个重要的加速技巧。因为在生成动作的过程中,机器人的观测值 o t \mathbf{o}_t ot(比如摄像头看到的图像、文本指令)是不变的。所以,模型可以把这些观测值的 Attention Key/Value 缓存起来,每一步只需要重新计算动作 token 的部分。这大大减少了计算量。
数据集和训练方案
和 LLM 一样,pi0 采用 预训练 / 后训练 的两阶段流程。预训练用多样化但质量相对较低的数据,让模型接触各种任务,并学会从错误中恢复;后训练用高质量数据,让模型能熟练、流畅地执行下游任务。
展望和不足
文中指出了当前研究的几点不足:
- 训练时对来自不同任务/机器人的数据集做了加权,但还不清楚预训练数据集该怎么组合、怎么加权;
- 目前并非所有评估任务都能可靠运行,需要多少数据、什么样的数据才能达到理想性能,也还不明确;
- 在预训练阶段,把不同任务、不同机器人的多样化数据结合起来,是否能带来更好的效果,仍有待观察;
- 研究结果在一定程度上表明通用预训练机器人基础模型是有可能的,但这种通用性能否延伸到自动驾驶、导航、腿部运动等领域,还需要进一步探索。
总的来说,文章对未来的展望更多集中在训练方式、训练数据集的优化上,而不是模型架构本身。