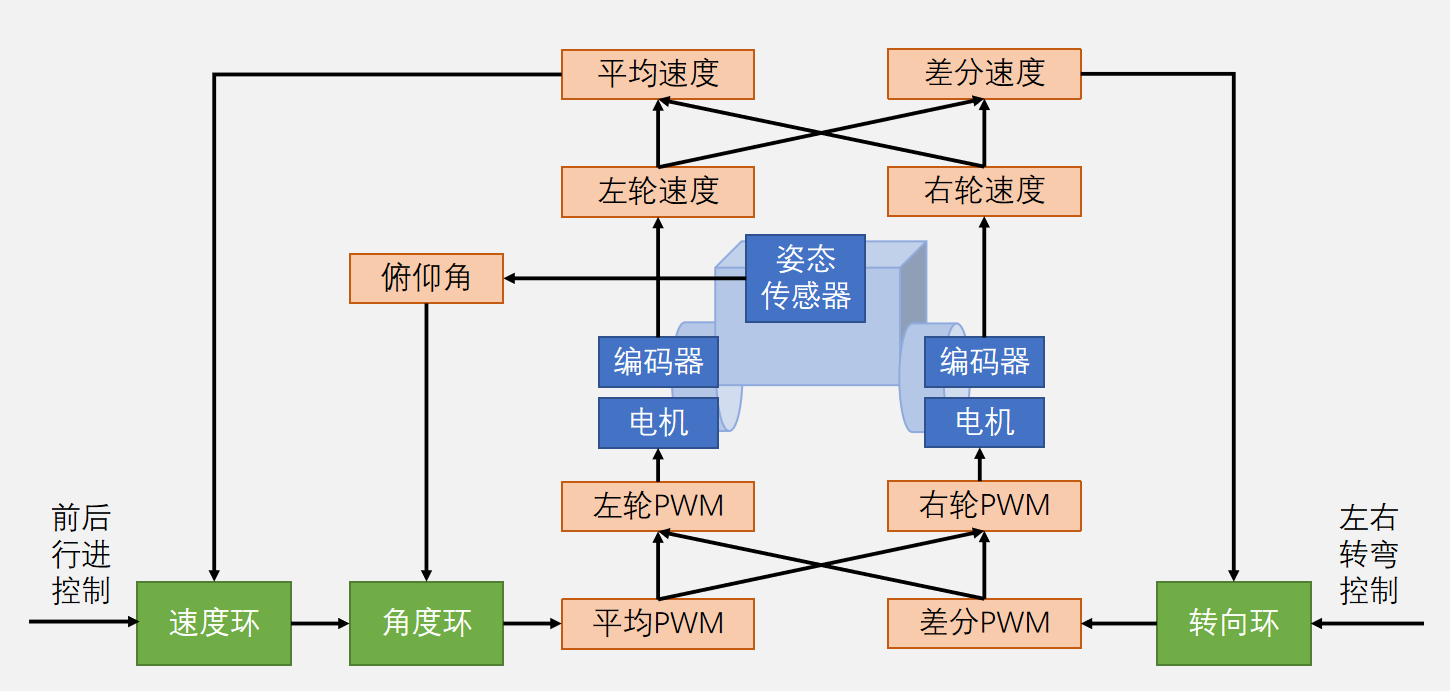
速度环
仅有角度环的平衡小车是不完美的,我们来继续实现速度环和角度环。
这里有一个问题:显然速度环的输出单位是r/s,而角度环的输入单位应该是角度,这应该怎么处理?
其实这是因为我们误认为PID的系数Kp、Ki、Kd都是没有单位的,但实际上,Kp、Ki、Kd,都是有单位的,Kp的单位就是度 /(转 / 秒)。
简而言之,PID计算时,Kp、Ki、Kd带有单位,会自动把输入值的单位,转换为输出值的单位。
代码如下:
cpp
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "LED.h"
#include "Timer.h"
#include "Key.h"
#include "MPU6050.h"
#include "Motor.h"
#include "Encoder.h"
#include "Serial.h"
#include "BlueSerial.h"
#include "PID.h"
#include <math.h>
#include <string.h>
#include <stdlib.h>
int16_t AX, AY, AZ, GX, GY, GZ;
uint8_t TimerErrorFlag;
uint16_t TimerCount;
float AngleAcc;
float AngleGyro;
float Angle;
uint8_t KeyNum, RunFlag;
int16_t LeftPWM, RightPWM;
int16_t AvePWM, DifPWM;
float LeftSpeed, RightSpeed;
float AveSpeed, DifSpeed;
PID_t AnglePID = {
.Kp = 3,
.Ki = 0.1,
.Kd = 3,
.OutMax = 100,
.OutMin = -100,
};
PID_t SpeedPID = {
.Kp = 2,
.Ki = 0.05,
.Kd = 0,
.OutMax = 20,
.OutMin = -20,
};
int main(void)
{
OLED_Init();
MPU6050_Init();
BlueSerial_Init();
LED_Init();
Key_Init();
Motor_Init();
Encoder_Init();
Serial_Init();
Timer_Init();
while (1)
{
if (RunFlag) {LED_ON();} else {LED_OFF();}
KeyNum = Key_GetNum();
if (KeyNum == 1)
{
if (RunFlag == 0)
{
PID_Init(&AnglePID);
PID_Init(&SpeedPID);
RunFlag = 1;
}
else
{
RunFlag = 0;
}
}
OLED_Clear();
OLED_Printf(0, 0, OLED_6X8, " Angle");
OLED_Printf(0, 8, OLED_6X8, "P:%05.2f", AnglePID.Kp);
OLED_Printf(0, 16, OLED_6X8, "I:%05.2f", AnglePID.Ki);
OLED_Printf(0, 24, OLED_6X8, "D:%05.2f", AnglePID.Kd);
OLED_Printf(0, 32, OLED_6X8, "T:%+05.1f", AnglePID.Target);
OLED_Printf(0, 40, OLED_6X8, "A:%+05.1f", Angle);
OLED_Printf(0, 48, OLED_6X8, "O:%+05.0f", AnglePID.Out);
OLED_Printf(0, 56, OLED_6X8, "GY:%+05d", GY);
OLED_Printf(50, 0, OLED_6X8, "Speed");
OLED_Printf(50, 8, OLED_6X8, "%05.2f", SpeedPID.Kp);
OLED_Printf(50, 16, OLED_6X8, "%05.2f", SpeedPID.Ki);
OLED_Printf(50, 24, OLED_6X8, "%05.2f", SpeedPID.Kd);
OLED_Printf(50, 32, OLED_6X8, "%+05.1f", SpeedPID.Target);
OLED_Printf(50, 40, OLED_6X8, "%+05.1f", AveSpeed);
OLED_Printf(50, 48, OLED_6X8, "%+05.0f", SpeedPID.Out);
OLED_Update();
if (BlueSerial_RxFlag == 1)
{
char *Tag = strtok(BlueSerial_RxPacket, ",");
if (strcmp(Tag, "key") == 0)
{
char *Name = strtok(NULL, ",");
char *Action = strtok(NULL, ",");
}
else if (strcmp(Tag, "slider") == 0)
{
char *Name = strtok(NULL, ",");
char *Value = strtok(NULL, ",");
if (strcmp(Name, "AngleKp") == 0)
{
AnglePID.Kp = atof(Value);
}
else if (strcmp(Name, "AngleKi") == 0)
{
AnglePID.Ki = atof(Value);
}
else if (strcmp(Name, "AngleKd") == 0)
{
AnglePID.Kd = atof(Value);
}
else if (strcmp(Name, "SpeedKp") == 0)
{
SpeedPID.Kp = atof(Value);
}
else if (strcmp(Name, "SpeedKi") == 0)
{
SpeedPID.Ki = atof(Value);
}
else if (strcmp(Name, "SpeedKd") == 0)
{
SpeedPID.Kd = atof(Value);
}
}
else if (strcmp(Tag, "joystick") == 0)
{
int8_t LH = atoi(strtok(NULL, ","));
int8_t LV = atoi(strtok(NULL, ","));
int8_t RH = atoi(strtok(NULL, ","));
int8_t RV = atoi(strtok(NULL, ","));
SpeedPID.Target = LV / 25.0;
DifPWM = RH / 2;
}
BlueSerial_RxFlag = 0;
}
BlueSerial_Printf("[plot,%f,%f]", SpeedPID.Target, AveSpeed);
}
}
void TIM1_UP_IRQHandler(void)
{
static uint16_t Count0, Count1;
if (TIM_GetITStatus(TIM1, TIM_IT_Update) == SET)
{
TIM_ClearITPendingBit(TIM1, TIM_IT_Update);
Key_Tick();
Count0 ++;
if (Count0 >= 10)
{
Count0 = 0;
MPU6050_GetData(&AX, &AY, &AZ, &GX, &GY, &GZ);
GY -= 16;
AngleAcc = -atan2(AX, AZ) / 3.14159 * 180;
AngleAcc += 0.5;
AngleGyro = Angle + GY / 32768.0 * 2000 * 0.01;
float Alpha = 0.01;
Angle = Alpha * AngleAcc + (1 - Alpha) * AngleGyro;
if (Angle > 50 || Angle < -50)
{
RunFlag = 0;
}
if (RunFlag)
{
AnglePID.Actual = Angle;
PID_Update(&AnglePID);
AvePWM = -AnglePID.Out;
LeftPWM = AvePWM + DifPWM / 2;
RightPWM = AvePWM - DifPWM / 2;
if (LeftPWM > 100) {LeftPWM = 100;} else if (LeftPWM < -100) {LeftPWM = -100;}
if (RightPWM > 100) {RightPWM = 100;} else if (RightPWM < -100) {RightPWM = -100;}
Motor_SetPWM(1, LeftPWM);
Motor_SetPWM(2, RightPWM);
}
else
{
Motor_SetPWM(1, 0);
Motor_SetPWM(2, 0);
}
}
Count1 ++;
if (Count1 >= 50)
{
Count1 = 0;
LeftSpeed = Encoder_Get(1) / 44.0 / 0.05 / 9.27666;
RightSpeed = Encoder_Get(2) / 44.0 / 0.05 / 9.27666;
AveSpeed = (LeftSpeed + RightSpeed) / 2.0;
DifSpeed = LeftSpeed - RightSpeed;
if (RunFlag)
{
SpeedPID.Actual = AveSpeed;
PID_Update(&SpeedPID);
AnglePID.Target = SpeedPID.Out;
}
}
if (TIM_GetITStatus(TIM1, TIM_IT_Update) == SET)
{
TimerErrorFlag = 1;
TIM_ClearITPendingBit(TIM1, TIM_IT_Update);
}
TimerCount = TIM_GetCounter(TIM1);
}
}转向环
代码如下:
cpp
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "LED.h"
#include "Timer.h"
#include "Key.h"
#include "MPU6050.h"
#include "Motor.h"
#include "Encoder.h"
#include "Serial.h"
#include "BlueSerial.h"
#include "PID.h"
#include <math.h>
#include <string.h>
#include <stdlib.h>
int16_t AX, AY, AZ, GX, GY, GZ;
uint8_t TimerErrorFlag;
uint16_t TimerCount;
float AngleAcc;
float AngleGyro;
float Angle;
uint8_t KeyNum, RunFlag;
int16_t LeftPWM, RightPWM;
int16_t AvePWM, DifPWM;
float LeftSpeed, RightSpeed;
float AveSpeed, DifSpeed;
PID_t AnglePID = {
.Kp = 3,
.Ki = 0.1,
.Kd = 3,
.OutMax = 100,
.OutMin = -100,
};
PID_t SpeedPID = {
.Kp = 2,
.Ki = 0.05,
.Kd = 0,
.OutMax = 20,
.OutMin = -20,
};
PID_t TurnPID = {
.Kp = 4,
.Ki = 3,
.Kd = 0,
.OutMax = 50,
.OutMin = -50,
};
int main(void)
{
OLED_Init();
MPU6050_Init();
BlueSerial_Init();
LED_Init();
Key_Init();
Motor_Init();
Encoder_Init();
Serial_Init();
Timer_Init();
while (1)
{
if (RunFlag) {LED_ON();} else {LED_OFF();}
KeyNum = Key_GetNum();
if (KeyNum == 1)
{
if (RunFlag == 0)
{
PID_Init(&AnglePID);
PID_Init(&SpeedPID);
PID_Init(&TurnPID);
RunFlag = 1;
}
else
{
RunFlag = 0;
}
}
OLED_Clear();
OLED_Printf(0, 0, OLED_6X8, " Angle");
OLED_Printf(0, 8, OLED_6X8, "P:%05.2f", AnglePID.Kp);
OLED_Printf(0, 16, OLED_6X8, "I:%05.2f", AnglePID.Ki);
OLED_Printf(0, 24, OLED_6X8, "D:%05.2f", AnglePID.Kd);
OLED_Printf(0, 32, OLED_6X8, "T:%+05.1f", AnglePID.Target);
OLED_Printf(0, 40, OLED_6X8, "A:%+05.1f", Angle);
OLED_Printf(0, 48, OLED_6X8, "O:%+05.0f", AnglePID.Out);
OLED_Printf(0, 56, OLED_6X8, "GY:%+05d", GY);
OLED_Printf(50, 0, OLED_6X8, "Speed");
OLED_Printf(50, 8, OLED_6X8, "%05.2f", SpeedPID.Kp);
OLED_Printf(50, 16, OLED_6X8, "%05.2f", SpeedPID.Ki);
OLED_Printf(50, 24, OLED_6X8, "%05.2f", SpeedPID.Kd);
OLED_Printf(50, 32, OLED_6X8, "%+05.1f", SpeedPID.Target);
OLED_Printf(50, 40, OLED_6X8, "%+05.1f", AveSpeed);
OLED_Printf(50, 48, OLED_6X8, "%+05.0f", SpeedPID.Out);
OLED_Printf(88, 0, OLED_6X8, "Turn");
OLED_Printf(88, 8, OLED_6X8, "%05.2f", TurnPID.Kp);
OLED_Printf(88, 16, OLED_6X8, "%05.2f", TurnPID.Ki);
OLED_Printf(88, 24, OLED_6X8, "%05.2f", TurnPID.Kd);
OLED_Printf(88, 32, OLED_6X8, "%+05.1f", TurnPID.Target);
OLED_Printf(88, 40, OLED_6X8, "%+05.1f", DifSpeed);
OLED_Printf(88, 48, OLED_6X8, "%+05.0f", TurnPID.Out);
OLED_Update();
if (BlueSerial_RxFlag == 1)
{
char *Tag = strtok(BlueSerial_RxPacket, ",");
if (strcmp(Tag, "key") == 0)
{
char *Name = strtok(NULL, ",");
char *Action = strtok(NULL, ",");
}
else if (strcmp(Tag, "slider") == 0)
{
char *Name = strtok(NULL, ",");
char *Value = strtok(NULL, ",");
if (strcmp(Name, "AngleKp") == 0)
{
AnglePID.Kp = atof(Value);
}
else if (strcmp(Name, "AngleKi") == 0)
{
AnglePID.Ki = atof(Value);
}
else if (strcmp(Name, "AngleKd") == 0)
{
AnglePID.Kd = atof(Value);
}
else if (strcmp(Name, "SpeedKp") == 0)
{
SpeedPID.Kp = atof(Value);
}
else if (strcmp(Name, "SpeedKi") == 0)
{
SpeedPID.Ki = atof(Value);
}
else if (strcmp(Name, "SpeedKd") == 0)
{
SpeedPID.Kd = atof(Value);
}
else if (strcmp(Name, "TurnKp") == 0)
{
TurnPID.Kp = atof(Value);
}
else if (strcmp(Name, "TurnKi") == 0)
{
TurnPID.Ki = atof(Value);
}
else if (strcmp(Name, "TurnKd") == 0)
{
TurnPID.Kd = atof(Value);
}
}
else if (strcmp(Tag, "joystick") == 0)
{
int8_t LH = atoi(strtok(NULL, ","));
int8_t LV = atoi(strtok(NULL, ","));
int8_t RH = atoi(strtok(NULL, ","));
int8_t RV = atoi(strtok(NULL, ","));
SpeedPID.Target = LV / 25.0;
TurnPID.Target = RH / 25.0;
}
BlueSerial_RxFlag = 0;
}
BlueSerial_Printf("[plot,%f,%f]", TurnPID.Target, DifSpeed);
}
}
void TIM1_UP_IRQHandler(void)
{
static uint16_t Count0, Count1;
if (TIM_GetITStatus(TIM1, TIM_IT_Update) == SET)
{
TIM_ClearITPendingBit(TIM1, TIM_IT_Update);
Key_Tick();
Count0 ++;
if (Count0 >= 10)
{
Count0 = 0;
MPU6050_GetData(&AX, &AY, &AZ, &GX, &GY, &GZ);
GY -= 16;
AngleAcc = -atan2(AX, AZ) / 3.14159 * 180;
AngleAcc += 0.5;
AngleGyro = Angle + GY / 32768.0 * 2000 * 0.01;
float Alpha = 0.01;
Angle = Alpha * AngleAcc + (1 - Alpha) * AngleGyro;
if (Angle > 50 || Angle < -50)
{
RunFlag = 0;
}
if (RunFlag)
{
AnglePID.Actual = Angle;
PID_Update(&AnglePID);
AvePWM = -AnglePID.Out;
LeftPWM = AvePWM + DifPWM / 2;
RightPWM = AvePWM - DifPWM / 2;
if (LeftPWM > 100) {LeftPWM = 100;} else if (LeftPWM < -100) {LeftPWM = -100;}
if (RightPWM > 100) {RightPWM = 100;} else if (RightPWM < -100) {RightPWM = -100;}
Motor_SetPWM(1, LeftPWM);
Motor_SetPWM(2, RightPWM);
}
else
{
Motor_SetPWM(1, 0);
Motor_SetPWM(2, 0);
}
}
Count1 ++;
if (Count1 >= 50)
{
Count1 = 0;
LeftSpeed = Encoder_Get(1) / 44.0 / 0.05 / 9.27666;
RightSpeed = Encoder_Get(2) / 44.0 / 0.05 / 9.27666;
AveSpeed = (LeftSpeed + RightSpeed) / 2.0;
DifSpeed = LeftSpeed - RightSpeed;
if (RunFlag)
{
SpeedPID.Actual = AveSpeed;
PID_Update(&SpeedPID);
AnglePID.Target = SpeedPID.Out;
TurnPID.Actual = DifSpeed;
PID_Update(&TurnPID);
DifPWM = TurnPID.Out;
}
}
if (TIM_GetITStatus(TIM1, TIM_IT_Update) == SET)
{
TimerErrorFlag = 1;
TIM_ClearITPendingBit(TIM1, TIM_IT_Update);
}
TimerCount = TIM_GetCounter(TIM1);
}
}