
🔥小叶-duck:个人主页
❄️个人专栏:《Data-Structure-Learning》《C++入门到进阶&自我学习过程记录》
《算法题讲解指南》--优选算法
《算法题讲解指南》--递归、搜索与回溯算法
《算法题讲解指南》--动态规划算法
✨未择之路,不须回头
已择之路,纵是荆棘遍野,亦作花海遨游
目录
5.不同路径
题目链接:
题目描述:
题目示例:
解法(动态规划):
算法思路:
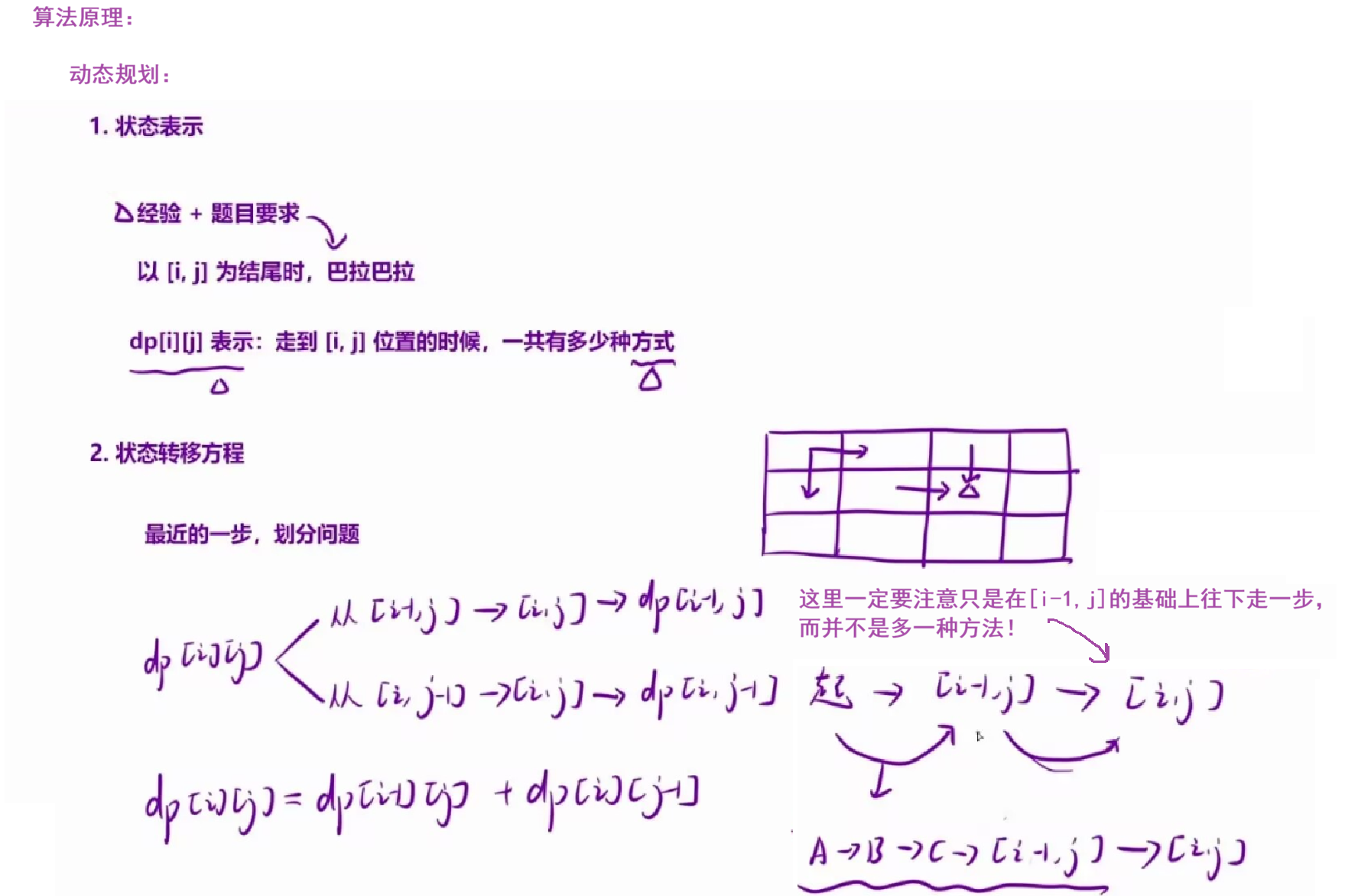
1.状态表示:
对于这种「路径类」的问题,我们的状态表示一般有两种形式:
i.从i,j位置出发,巴拉巴拉;
ii.从起始位置出发,到达i,j位置,巴拉巴拉。
这里选择第二种定义状态表示的方式:
dp i j 表示:走到i,j位置处,一共有多少种方式。
2.状态转移方程:
简单分析一下。如果dp i j 表示到达i,j位置的方法数,那么到达i,j位置之前的一小步,有两种情况:
i.从\[i,j位置的上方(i - 1,j的位置)向下走一步,转移到i,j位置;
ii.从i,j位置的左方(i,j-1的位置)向右走一步,转移到i,j位置。
由于我们要求的是有多少种方法,因此状态转移方程就呼之欲出了:dp i j =dp i - 1 j + dp i j - 1 。
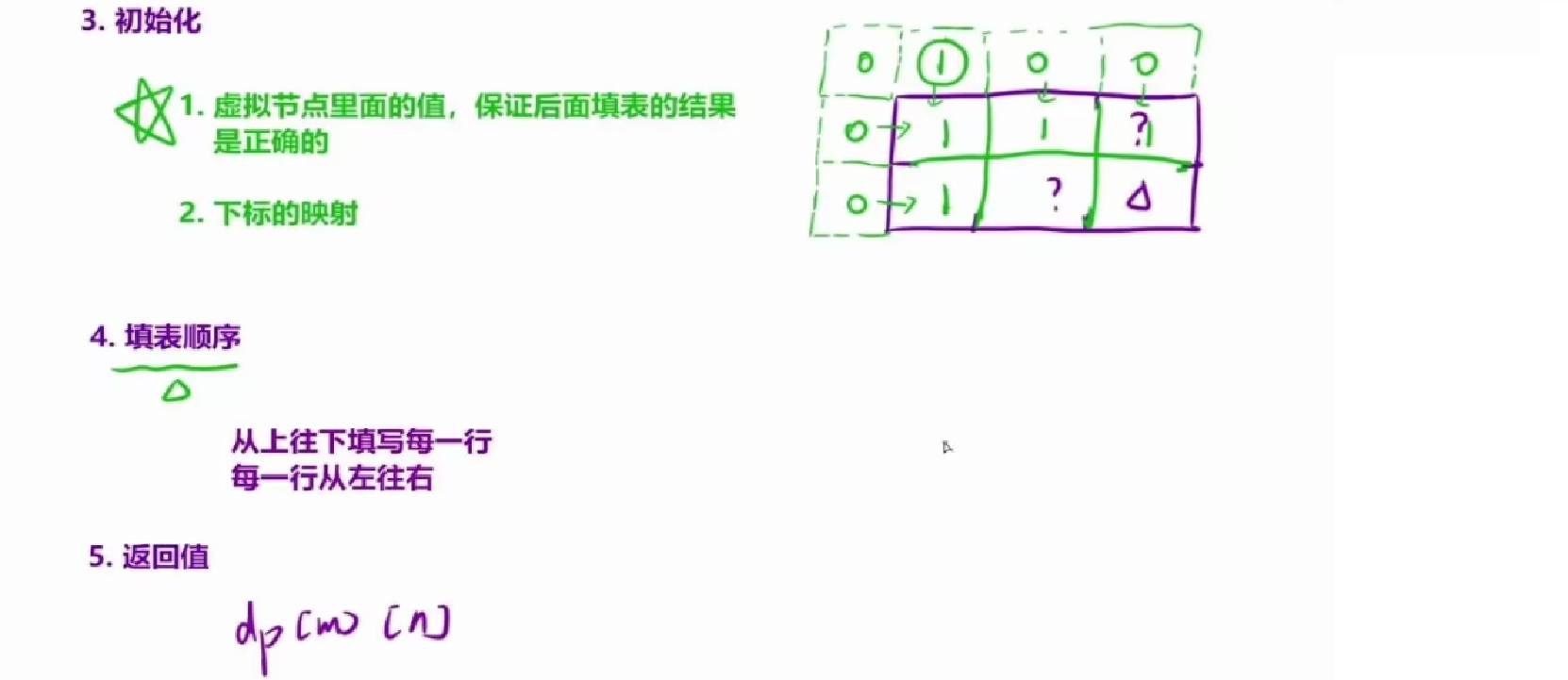
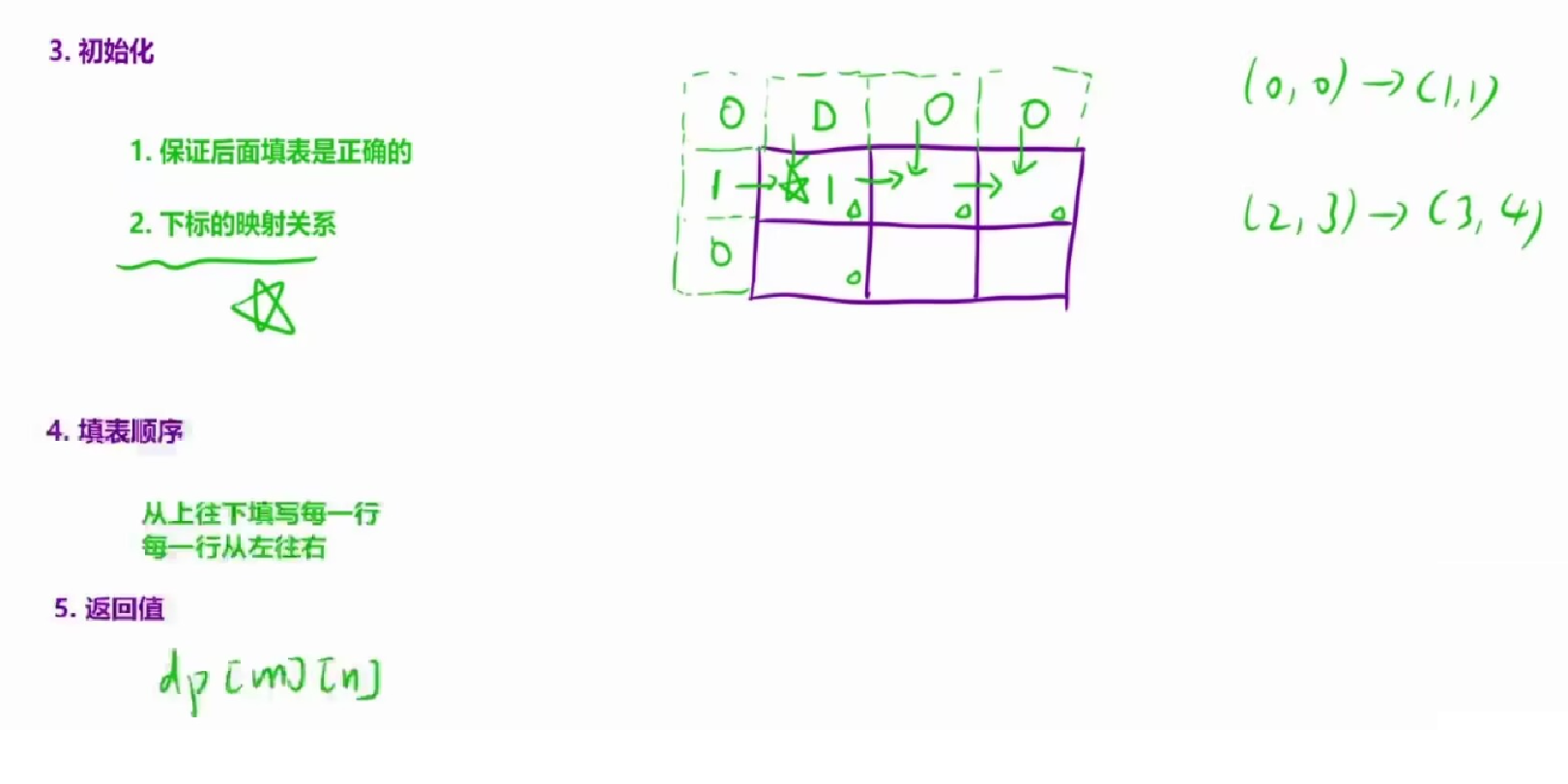
3.初始化:
可以在最前面加上一个「辅助结点」,帮助我们初始化。使用这种技巧要注意两个点:
i,辅助结点里面的值要「保证后续填表是正确的」;
ii.「下标的映射关系」。
在本题中,「添加一行」,并且「添加一列」后,只需将dp01的位置初始化为1即可。
4.填表顺序:
根据「状态转移方程」的推导来看,填表的顺序就是「从上往下」填每一行,在填写每一行的时候「从左往右」。
5.返回值:
根据「状态表示」,我们要返回dp m n 的值。
C++算法代码:
cpp
class Solution {
public:
int uniquePaths(int m, int n)
{
//1、创建 dp 表
//2、初始化
//3、填表
//4、返回值
vector<vector<int>> dp(m + 1, vector<int>(n + 1));
dp[0][1] = 1;
for(int i = 1; i <= m; i++)
{
for(int j = 1; j <= n; j++)
{
dp[i][j] = dp[i - 1][j] + dp[i][j - 1];
}
}
return dp[m][n];
}
};算法总结及流程解析:
6.不同路径II
题目链接:
题目描述:
题目示例:
解法(动态规划):
算法思路:
这道题算法逻辑和上面一题基本是十分类似的,唯一不同的在于状态转移方程,需要考虑有无障碍的情况:
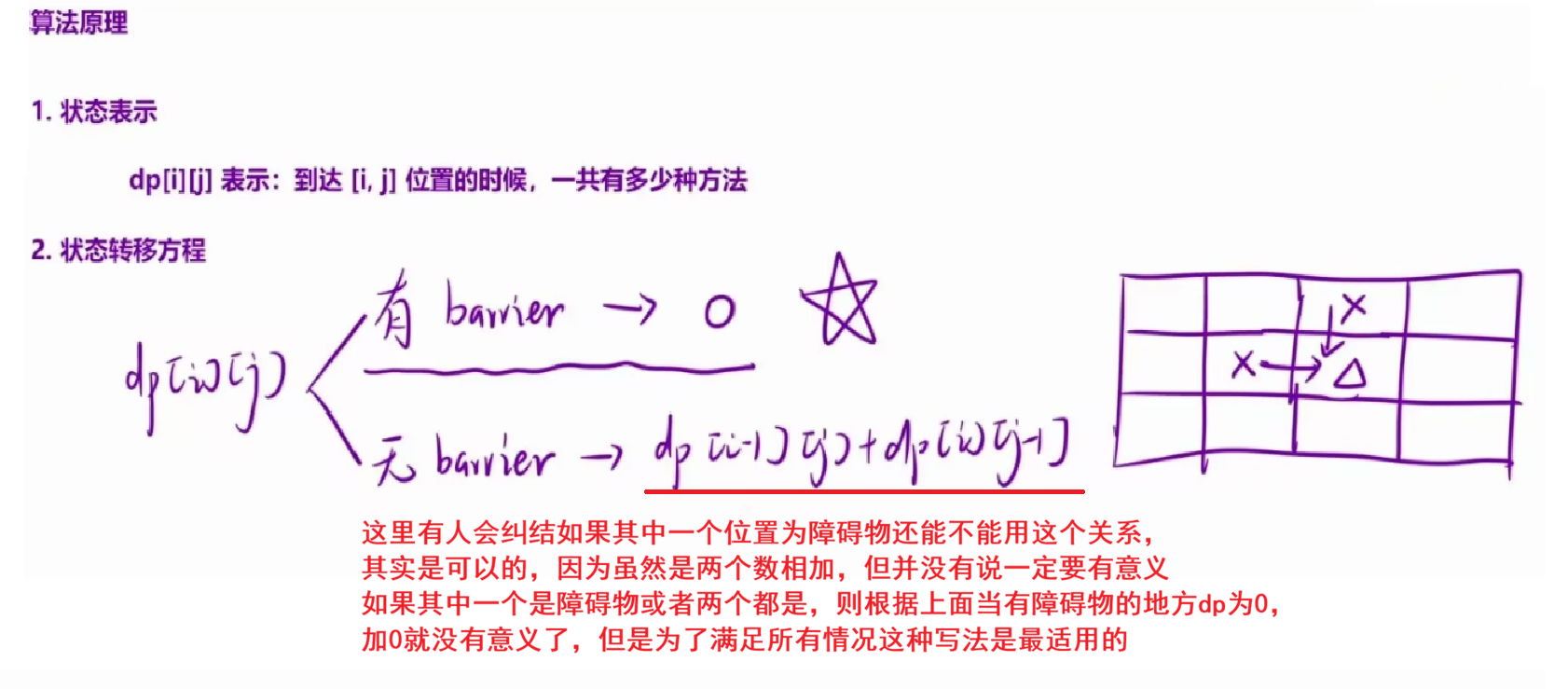
状态转移方程:
简单分析一下。如果dpij表示到达i,j位置的方法数,那么到达i,j位置之前的一小步,有两种情况:
i.从i,j位置的上方(i -1,j的位置)向下走一步,转移到i,j位置;
ii.从i,j位置的左方(i,j- 1的位置)向右走一步,转移到i,j位置。
但是,i- 1,j与i,j- 1位置都是可能有障碍的,此时从上面或者左边是不可能到达i,j位置的,也就是说,此时的方法数应该是0。
由此我们可以得出一个结论,只要这个位置上「有障碍物」,那么我们就不需要计算这个位置上的值,直接让它等于0即可。
C++算法代码:
cpp
class Solution {
public:
int uniquePathsWithObstacles(vector<vector<int>>& obstacleGrid)
{
//1、创建 dp 表
//2、初始化
//3、填表
//4、返回值
int m = obstacleGrid.size();
int n = obstacleGrid[0].size();
vector<vector<int>> dp(m + 1, vector<int>(n + 1));
dp[0][1] = 1;
for(int i = 1; i <= m; i++)
{
for(int j = 1; j <= n; j++)
{
if(obstacleGrid[i - 1][j - 1] == 0)//一定要注意dp数组和题目数组的映射关系
{
dp[i][j] = dp[i - 1][j] + dp[i][j - 1];
}
}
}
return dp[m][n];
}
};算法总结及流程解析:
结束语
到此,5.不同路径,6.不同路径II 这两道算法题就讲解完了。**不同路径,通过状态表示dpij记录到达(i,j)的路径数,状态转移方程为dpij=dpi-1j+dpij-1,并采用辅助结点技巧初始化。不同路径II,在第一题基础上增加了障碍物判断,遇到障碍物时路径数置0。**希望大家能有所收获!