RustRover + J-Link 一键调试 STM32 教程
本文基于当前工程,完整说明如何在 RustRover 中实现"一键使用 J-Link 调试 STM32",并把相关脚本、配置、运行项和原理全部整理出来,方便直接改写成教程博客。
本文覆盖:
- 工程中涉及的所有关键文件和位置
- RustRover 调试配置的完整内容
- J-Link 启动和下载脚本的完整内容
- 交叉编译、烧录、连接调试器的原理
- 整体流程图
- 常见问题和排查方法
一、目标效果
最终要实现的体验是:
- 在 RustRover 中点击一次
J-Link Debug - IDE 自动编译 STM32 固件
- 自动启动
JLinkGDBServerCLExe - 自动把 ELF 下载到 STM32
- 自动连接
arm-none-eabi-gdb - 直接在 RustRover 里断点、单步、查看变量和寄存器
二、这套方案的核心思路
RustRover 本身主要负责 GDB 前端,也就是:
- 管理断点
- 控制单步执行
- 展示变量、寄存器、调用栈
但它不会自动替你完成这些嵌入式特有动作:
- 选择 STM32 芯片型号
- 启动 J-Link GDB Server
- 等待 GDB Server 端口就绪
- 把 ELF 下载进 Flash
所以这套方案的本质是把任务拆成两层:
第一层:脚本负责准备调试环境
脚本完成这些动作:
- 交叉编译 ELF
- 启动
JLinkGDBServerCLExe - 用
arm-none-eabi-gdb批处理执行load - 让目标芯片复位并停住
第二层:RustRover 接管调试会话
RustRover 再做这些动作:
- 连接
localhost:2331 - 加载 ELF 符号
- 提供完整 IDE 调试体验
所以,一键调试并不是 RustRover 直接"懂 J-Link + STM32",而是:
RustRover 调试配置 + 前置脚本 + J-Link GDB Server + ARM GDB
共同组成了一条自动化链路。
三、工程中涉及的文件和位置
下面这些文件参与了整个一键调试流程。
1. Cargo 配置
2. Rust 入口代码
3. RustRover 运行配置
4. 自动化脚本
5. 调试日志
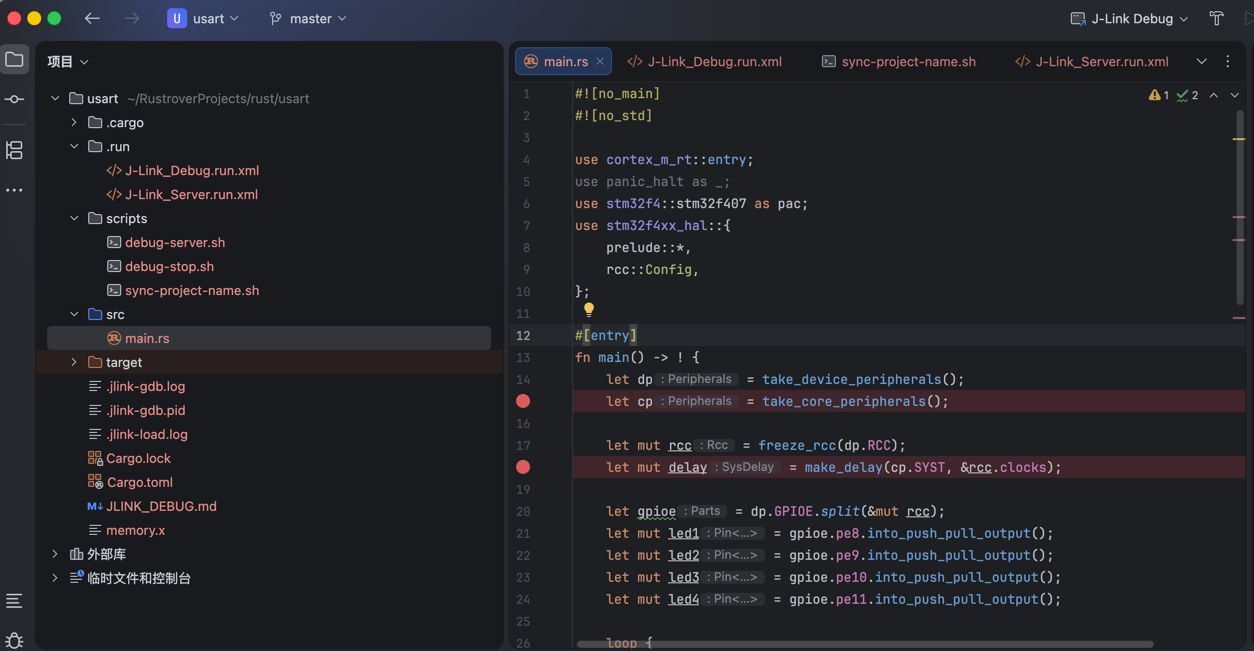
四、工程截图
下面这张图展示了当前工程在 RustRover 中的实际布局,以及一键调试时会用到的几个核心文件:
.run/J-Link_Debug.run.xml.run/J-Link_Server.run.xmlscripts/debug-server.shscripts/debug-stop.shscripts/sync-project-name.shsrc/main.rs
五、工程配置的完整内容
这一节把当前项目里真正起作用的配置全部列出来。
1. Cargo.toml
文件位置:
完整内容:
toml
[package]
name = "usart"
version = "0.1.0"
edition = "2024"
[[bin]]
name = "usart"
path = "src/main.rs"
test = false
bench = false
[dependencies]
cortex-m = "0.7.7"
cortex-m-rt = "0.7.5"
panic-halt = "1.0.0"
stm32f4 = { version = "0.16.0", features = ["stm32f407", "rt"] }
stm32f4xx-hal = { version = "0.23.0", features = ["stm32f407"] }
[profile.dev]
codegen-units = 1
debug = 2
incremental = false
lto = false
[profile.release]
codegen-units = 1
debug = 2
lto = true这里最关键的是:
toml
[[bin]]
name = "usart"
path = "src/main.rs"
test = false
bench = false原因是 embedded Rust 工程通常是:
#![no_std]#![no_main]
而如果 IDE 不小心触发 cargo test 风格构建,就会尝试引入 test crate。
对于 thumbv7em-none-eabihf 这样的裸机目标,没有标准测试运行时,所以会报:
text
can't find crate for `test`显式关闭 test 和 bench 后,就能避免这个问题。
2. .cargo/config.toml
文件位置:
完整内容:
toml
[build]
target = "thumbv7em-none-eabihf"
[target.thumbv7em-none-eabihf]
rustflags = [
"-C",
"link-arg=--nmagic",
"-C",
"link-arg=-Tlink.x",
]这段配置做了两件关键的事:
- 固定默认构建目标为
thumbv7em-none-eabihf - 链接时显式指定
link.x
作用是让 cargo build 生成 STM32F4 运行所需的裸机 ELF,而不是宿主机可执行文件。
3. memory.x
文件位置:
完整内容:
ld
MEMORY
{
FLASH : ORIGIN = 0x08000000, LENGTH = 512K
RAM : ORIGIN = 0x20000000, LENGTH = 128K
}这个文件告诉链接器目标芯片的内存布局。
如果这里的 Flash/RAM 配置和目标板不一致,常见后果包括:
- 程序无法正确下载
- 程序运行异常
- 调试符号和地址不匹配
4. src/main.rs
文件位置:
完整内容:
rust
#![no_main]
#![no_std]
use cortex_m_rt::entry;
use panic_halt as _;
use stm32f4::stm32f407 as pac;
use stm32f4xx_hal::{
prelude::*,
rcc::Config,
};
#[entry]
fn main() -> ! {
let dp = take_device_peripherals();
let cp = take_core_peripherals();
let mut rcc = freeze_rcc(dp.RCC);
let mut delay = make_delay(cp.SYST, &rcc.clocks);
let gpioe = dp.GPIOE.split(&mut rcc);
let mut led1 = gpioe.pe8.into_push_pull_output();
let mut led2 = gpioe.pe9.into_push_pull_output();
let mut led3 = gpioe.pe10.into_push_pull_output();
let mut led4 = gpioe.pe11.into_push_pull_output();
loop {
led1.set_high();
delay.delay_ms(500);
led1.set_low();
led2.set_high();
delay.delay_ms(500);
led2.set_low();
led3.set_high();
delay.delay_ms(500);
led3.set_low();
led4.set_high();
delay.delay_ms(500);
led4.set_low();
}
}
#[inline(never)]
fn take_device_peripherals() -> pac::Peripherals {
pac::Peripherals::take().unwrap()
}
#[inline(never)]
fn take_core_peripherals() -> cortex_m::Peripherals {
cortex_m::Peripherals::take().unwrap()
}
#[inline(never)]
fn freeze_rcc(rcc: pac::RCC) -> stm32f4xx_hal::rcc::Rcc {
rcc.freeze(Config::hsi().sysclk(84.MHz()))
}
#[inline(never)]
fn make_delay(
syst: cortex_m::peripheral::SYST,
clocks: &stm32f4xx_hal::rcc::Clocks,
) -> stm32f4xx_hal::timer::delay::SysDelay {
syst.delay(clocks)
}代码本身不是一键调试的重点,但这里的 #![no_main] 和 #![no_std] 解释了为什么这类项目不能沿用桌面 Rust 工程默认的 cargo test 逻辑。
六、RustRover 调试配置的完整内容
这一节是整个教程里最适合直接贴到博客中的部分。
1. J-Link Server.run.xml
文件位置:
完整内容:
xml
<component name="ProjectRunConfigurationManager">
<configuration default="false" name="J-Link Server" type="ShConfigurationType">
<option name="SCRIPT_TEXT" value="" />
<option name="SCRIPT_PATH" value="$PROJECT_DIR$/scripts/debug-server.sh" />
<option name="SCRIPT_WORKING_DIRECTORY" value="$PROJECT_DIR$" />
<option name="INTERPRETER_PATH" value="/bin/zsh" />
<option name="INDEPENDENT_SCRIPT_PATH" value="true" />
<option name="INDEPENDENT_SCRIPT_WORKING_DIRECTORY" value="true" />
<envs />
<method v="2" />
</configuration>
</component>这个运行配置本质上就是让 RustRover 调用一个 shell 脚本:
- 脚本路径:
$PROJECT_DIR$/scripts/debug-server.sh - 解释器:
/bin/zsh
它的职责不是打开 IDE 调试面板,而是"准备好远程调试环境"。
2. J-Link Debug.run.xml
文件位置:
完整内容:
xml
<component name="ProjectRunConfigurationManager">
<configuration
default="false"
name="J-Link Debug"
type="RsRemoteRunConfiguration"
debuggerKind="USER_GDB"
userDebuggerPath="/Applications/ArmGNUToolchain/15.2.rel1/arm-none-eabi/bin/arm-none-eabi-gdb"
remoteCommand="localhost:2331"
symbolFile="$PROJECT_DIR$/target/thumbv7em-none-eabihf/debug/__rustrover_current.elf"
sysroot="">
<method v="2">
<option
name="RunConfigurationTask"
enabled="true"
run_configuration_name="J-Link Server"
run_configuration_type="ShConfigurationType" />
</method>
</configuration>
</component>这里的关键字段分别表示:
type="RsRemoteRunConfiguration"- 这是 RustRover 的远程调试配置
debuggerKind="USER_GDB"- 使用用户指定的 GDB
userDebuggerPath=".../arm-none-eabi-gdb"- 这里必须是 ARM 工具链里的 GDB,而不是系统默认 GDB
remoteCommand="localhost:2331"- GDB 连接到本机 2331 端口,也就是 J-Link GDB Server
symbolFile=".../__rustrover_current.elf"- IDE 用这个 ELF 加载调试符号
RunConfigurationTask- 在真正调试前先运行
J-Link Server
- 在真正调试前先运行
所以 J-Link Debug 并不是直接自己启动 J-Link,而是:
- 先跑
J-Link Server - 再连接已经准备好的 GDB server
七、脚本的完整内容
1. scripts/debug-server.sh
文件位置:
完整内容:
zsh
#!/bin/zsh
set -euo pipefail
cd "$(dirname "$0")/.."
TARGET="thumbv7em-none-eabihf"
PROJECT_NAME="${PWD:t}"
SYMBOL_LINK="target/${TARGET}/debug/__rustrover_current.elf"
GDB_BIN="/Applications/ArmGNUToolchain/15.2.rel1/arm-none-eabi/bin/arm-none-eabi-gdb"
JLINK_GDB_SERVER="/Applications/SEGGER/JLink/JLinkGDBServerCLExe"
DEVICE="STM32F407ZE"
INTERFACE="SWD"
SPEED="4000"
GDB_PORT="2331"
SWO_PORT="2332"
TELNET_PORT="2333"
PID_FILE=".jlink-gdb.pid"
SERVER_LOG=".jlink-gdb.log"
LOAD_LOG=".jlink-load.log"
/bin/zsh scripts/debug-stop.sh
/bin/zsh scripts/sync-project-name.sh
cargo build --target "${TARGET}"
BINARY="target/${TARGET}/debug/${PROJECT_NAME}"
if [[ ! -f "${BINARY}" ]]; then
echo "Missing ELF file: ${BINARY}" >&2
exit 1
fi
ln -sfn "${PROJECT_NAME}" "${SYMBOL_LINK}"
if [[ ! -x "${GDB_BIN}" ]]; then
echo "Missing GDB binary: ${GDB_BIN}" >&2
exit 1
fi
nohup "${JLINK_GDB_SERVER}" \
-device "${DEVICE}" \
-if "${INTERFACE}" \
-speed "${SPEED}" \
-port "${GDB_PORT}" \
-swoport "${SWO_PORT}" \
-telnetport "${TELNET_PORT}" \
-noir >"${SERVER_LOG}" 2>&1 &
server_pid=$!
echo "${server_pid}" > "${PID_FILE}"
for _ in {1..50}; do
if grep -q "Listening on TCP/IP port ${GDB_PORT}" "${SERVER_LOG}" 2>/dev/null; then
break
fi
if ! kill -0 "${server_pid}" 2>/dev/null; then
echo "J-Link GDB server exited unexpectedly. See ${SERVER_LOG}:" >&2
cat "${SERVER_LOG}" >&2 || true
exit 1
fi
sleep 0.2
done
if ! grep -q "Listening on TCP/IP port ${GDB_PORT}" "${SERVER_LOG}" 2>/dev/null; then
echo "Timed out waiting for J-Link GDB server to start. See ${SERVER_LOG}:" >&2
cat "${SERVER_LOG}" >&2 || true
exit 1
fi
if ! "${GDB_BIN}" \
-q \
-nx \
-batch \
"${BINARY}" \
-ex "target extended-remote localhost:${GDB_PORT}" \
-ex "monitor reset" \
-ex "monitor halt" \
-ex "load" \
-ex "monitor reset" \
-ex "monitor halt" \
-ex "disconnect" >"${LOAD_LOG}" 2>&1; then
echo "ELF load failed. See ${LOAD_LOG}:" >&2
cat "${LOAD_LOG}" >&2 || true
exit 1
fi这个脚本是整个方案的核心。
这段脚本做了什么
从头到尾,它依次执行:
- 切换到工程根目录
- 定义目标平台、GDB 路径、J-Link Server 路径、芯片型号、端口等参数
- 先调用
debug-stop.sh清理旧进程 - 再调用
sync-project-name.sh,保证包名和目录名一致 - 执行
cargo build --target thumbv7em-none-eabihf - 检查 ELF 是否存在
- 创建
__rustrover_current.elf符号链接 - 启动
JLinkGDBServerCLExe - 循环等待
2331端口就绪 - 用
arm-none-eabi-gdb连接 server 并执行load
几个关键变量的意义
zsh
TARGET="thumbv7em-none-eabihf"表示交叉编译目标架构。
zsh
GDB_BIN="/Applications/ArmGNUToolchain/15.2.rel1/arm-none-eabi/bin/arm-none-eabi-gdb"表示真正使用的 GDB 必须是 ARM 交叉工具链版本。
zsh
JLINK_GDB_SERVER="/Applications/SEGGER/JLink/JLinkGDBServerCLExe"表示实际与 J-Link 探针通信的服务端程序。
zsh
DEVICE="STM32F407ZE"
INTERFACE="SWD"告诉 J-Link:
- 目标芯片是什么
- 用哪种调试接口连接
zsh
GDB_PORT="2331"
SWO_PORT="2332"
TELNET_PORT="2333"这些端口分别用于:
2331:GDB 连接2332:SWO2333:Telnet 控制台
为什么要先 load
脚本里最重要的一段是:
zsh
"${GDB_BIN}" \
-q \
-nx \
-batch \
"${BINARY}" \
-ex "target extended-remote localhost:${GDB_PORT}" \
-ex "monitor reset" \
-ex "monitor halt" \
-ex "load" \
-ex "monitor reset" \
-ex "monitor halt" \
-ex "disconnect"这表示脚本在 RustRover 接管之前,先用 GDB 完成一次自动下载。
也就是说,RustRover 真正开始调试时:
- 固件已经烧写到 Flash
- 芯片已经连接到 J-Link GDB Server
- 芯片已经停在一个可调试状态
这样 IDE 只需要做"连接 + 显示调试界面"。
2. scripts/debug-stop.sh
文件位置:
完整内容:
zsh
#!/bin/zsh
set -euo pipefail
cd "$(dirname "$0")/.."
PID_FILE=".jlink-gdb.pid"
GDB_PORT="2331"
if [[ -f "${PID_FILE}" ]]; then
pid="$(cat "${PID_FILE}")"
if kill -0 "${pid}" 2>/dev/null; then
kill "${pid}" 2>/dev/null || true
fi
rm -f "${PID_FILE}"
fi
pkill -f "JLinkGDBServerCLExe.*-port ${GDB_PORT}" 2>/dev/null || true这个脚本的作用是防止重复启动 J-Link GDB Server。
如果你上一次调试结束后 server 没有退出,这里就会:
- 根据 pid 文件杀掉旧进程
- 再额外通过端口参数匹配的方式做一次兜底清理
这样可以避免最常见的问题:
text
Address already in use3. scripts/sync-project-name.sh
文件位置:
完整内容:
zsh
#!/bin/zsh
set -euo pipefail
cd "$(dirname "$0")/.."
project_name="${PWD:t}"
current_name="$(sed -nE 's/^name = "(.*)"/\1/p' Cargo.toml | head -n 1)"
if [[ -z "${current_name}" ]]; then
echo "Failed to read package name from Cargo.toml" >&2
exit 1
fi
if [[ "${current_name}" == "${project_name}" ]]; then
exit 0
fi
tmp_file="$(mktemp)"
awk -v new_name="${project_name}" '
BEGIN { in_package = 0; updated = 0 }
/^\[package\]$/ { in_package = 1; print; next }
/^\[/ && $0 != "[package]" { in_package = 0 }
in_package && /^name = "/ && !updated {
print "name = \"" new_name "\""
updated = 1
next
}
{ print }
' Cargo.toml > "${tmp_file}"
mv "${tmp_file}" Cargo.toml
echo "Updated package name: ${current_name} -> ${project_name}"这个脚本的存在,是为了配合下面这段逻辑:
zsh
PROJECT_NAME="${PWD:t}"
BINARY="target/${TARGET}/debug/${PROJECT_NAME}"脚本默认认为最终的 ELF 名字和当前目录名一致。
为了避免包名和目录名不同导致找不到二进制,就在每次调试前自动同步 Cargo.toml 中的包名。
八、为什么需要 __rustrover_current.elf
在 debug-server.sh 里有这一句:
zsh
ln -sfn "${PROJECT_NAME}" "${SYMBOL_LINK}"而 SYMBOL_LINK 的值是:
zsh
SYMBOL_LINK="target/${TARGET}/debug/__rustrover_current.elf"这背后的目的很简单:
- Cargo 生成的真实 ELF 文件名通常跟包名有关
- RustRover 的调试配置更适合写一个固定的符号文件路径
- 所以脚本每次构建后都创建一个固定名字的符号链接
这样调试配置就可以长期固定为:
xml
symbolFile="$PROJECT_DIR$/target/thumbv7em-none-eabihf/debug/__rustrover_current.elf"不需要随着工程名变化而手动修改。
九、一键调试时到底发生了什么
这一节适合博客里用"执行链路"来解释。
分步说明
- 你在 RustRover 中点击
J-Link Debug - RustRover 读取
.run/J-Link_Debug.run.xml - 它发现这个配置有一个前置任务
J-Link Server - RustRover 先执行
.run/J-Link_Server.run.xml - 这个运行配置启动
scripts/debug-server.sh debug-server.sh调用debug-stop.sh清理旧的 J-Link GDB Serverdebug-server.sh调用sync-project-name.sh,保证包名和目录名一致debug-server.sh执行cargo build --target thumbv7em-none-eabihf- 脚本确认生成的 ELF 文件存在
- 脚本创建
__rustrover_current.elf符号链接 - 脚本启动
JLinkGDBServerCLExe - 脚本等待日志中出现
Listening on TCP/IP port 2331 - 脚本调用
arm-none-eabi-gdb批处理执行target/reset/halt/load - 固件被下载到 STM32 的 Flash
- 芯片被复位并停住
- 前置脚本结束
- RustRover 正式启动远程 GDB 调试
- RustRover 用
arm-none-eabi-gdb连接localhost:2331 - RustRover 读取
__rustrover_current.elf的符号 - 你开始在 IDE 中打断点、单步和查看变量
十、流程图
1. 一键调试流程图
text
+----------------------+
| RustRover |
| Click J-Link Debug |
+----------+-----------+
|
v
+----------------------+
| J-Link Debug |
| Remote GDB config |
+----------+-----------+
|
| before launch
v
+----------------------+
| J-Link Server |
| Shell config |
+----------+-----------+
|
v
+-------------------------------+
| scripts/debug-server.sh |
+----------+--------------------+
|
+--> debug-stop.sh
|
+--> sync-project-name.sh
|
+--> cargo build
|
+--> create __rustrover_current.elf
|
+--> start JLinkGDBServerCLExe
|
+--> wait for port 2331
|
+--> arm-none-eabi-gdb batch load
|
v
+-------------------------------+
| STM32 firmware loaded |
| target reset and halted |
+----------+--------------------+
|
v
+-------------------------------+
| RustRover attaches via GDB |
| remote = localhost:2331 |
| symbol = __rustrover_current |
+----------+--------------------+
|
v
+-------------------------------+
| Breakpoint / Step / Inspect |
+-------------------------------+2. 组件关系图
text
RustRover
|
| runs
v
J-Link Debug.run.xml
|
| triggers before-launch task
v
J-Link Server.run.xml
|
| executes
v
scripts/debug-server.sh
|
+---- cargo build ------------------------------> target/thumbv7em-none-eabihf/debug/usart
|
+---- ln -sfn ---------------------------------> __rustrover_current.elf
|
+---- start JLinkGDBServerCLExe ---------------> J-Link probe
| |
| v
| STM32
|
+---- arm-none-eabi-gdb batch load ------------> J-Link GDB Server
|
v
RustRover arm-none-eabi-gdb attach
|
v
IDE debugging UI3. 下载阶段时序图
text
RustRover debug-server.sh JLinkGDBServer arm-none-eabi-gdb STM32
| | | | |
| run before task | | | |
|-------------------->| | | |
| | start server | | |
| |------------------->| | |
| | wait ready | | |
| |<-------------------| listening on 2331 | |
| | run batch gdb | | |
| |------------------------------------------->| |
| | |<----------------------| connect remote |
| | |---------------------->| |
| | |<----------------------| monitor reset |
| | |------------------------------->| reset |
| | |<----------------------| monitor halt |
| | |------------------------------->| halt |
| | |<----------------------| load |
| | |------------------------------->| write flash|
| | |<----------------------| reset/halt |
| | |------------------------------->| halt |
| | |<----------------------| disconnect |
| | done | | |
|<--------------------| | | |
| attach gdb | | | |
|--------------------------------------------------------------->| |
| debug session starts | |十一、这套方案成立的原理
1. RustRover 只负责 GDB 前端
RustRover 本质上并不直接控制 J-Link 探针,而是通过 GDB 与远端调试服务通信。
它擅长的是:
- IDE 断点管理
- 源码级单步
- 变量查看
- 调用栈展示
它不擅长的是:
- 启动 J-Link GDB Server
- 识别具体 STM32 型号
- 自动下载裸机固件
所以这部分必须由脚本补足。
2. JLinkGDBServerCLExe 提供的是标准 GDB Remote 协议
J-Link GDB Server 启动后会监听 2331,暴露一个标准 GDB Remote 端口。
无论前端是 RustRover、CLion 还是命令行 GDB,只要能连上这个端口,就能调试目标芯片。
因此这个方案的关键不是 RustRover 特性,而是:
- 让 J-Link 正确地对外提供一个 GDB 远程服务
- 让 RustRover 正确地连接这个服务
3. 先下载,再附加调试
这套方案没有让 RustRover 自己执行 load。
而是由 debug-server.sh 用批处理 GDB 先完成下载。
这么做的好处是:
- 下载流程更可控
- 日志更独立
- RustRover 只做它擅长的事
- 出问题时可以分开定位是"下载失败"还是"IDE 连接失败"
4. 固定符号文件路径
RustRover 调试时需要一个 ELF 来加载符号。
这个 ELF 不只是为了"启动程序",更重要的是:
- 函数名解析
- 源码定位
- 断点映射
- 变量和栈信息解析
用 __rustrover_current.elf 这个固定名字做符号链接,相当于给 IDE 提供一个稳定入口。
十二、常见问题和排查方法
1. 报错 can't find crate for 'test'
原因:
- embedded 工程被按测试目标构建
解决:
- 在
Cargo.toml里为[[bin]]增加:
toml
test = false
bench = false2. RustRover 连不上 localhost:2331
原因可能包括:
- J-Link GDB Server 没有成功启动
- 旧进程仍占用端口
- J-Link 没有连接板子
- 调试前置脚本执行失败
优先检查:
3. 报错 Missing ELF file
原因:
cargo build没成功- 包名和目录名不一致
- 目标路径不匹配
排查:
- 手动执行
cargo build --target thumbv7em-none-eabihf - 检查
sync-project-name.sh
4. 能烧进去,但断点不正常
原因可能包括:
- 符号文件不是当前固件
memory.x地址错误- 芯片型号设置错误
- 编译优化影响源码级调试体验
重点检查:
symbolFile是否指向__rustrover_current.elfDEVICE="STM32F407ZE"是否匹配实际芯片memory.x是否匹配板子
十三、教程博客可直接使用的总结
如果要把本文改写成博客,可以把结论概括成一句话:
RustRover 本身只负责 GDB 前端,真正实现 STM32 一键 J-Link 调试的是一套"运行配置 + shell 脚本 + J-Link GDB Server + ARM GDB"的自动化链路。
更具体一点,这条链路由三部分组成:
- Cargo 和链接脚本负责生成正确的嵌入式 ELF
debug-server.sh负责启动 J-Link GDB Server 并下载程序- RustRover 负责连接 GDB Server 并提供 IDE 调试体验
最终用户只需要点击一次 J-Link Debug,但背后实际发生的是:
- 编译
- 启动 J-Link GDB Server
- 下载 ELF 到 STM32
- RustRover 连接远程 GDB
- 开始断点调试
这就是当前工程中"一键 J-Link 调试 STM32"的完整实现方式。