目录
[3. 图像插值](#3. 图像插值)
[3.1 最近邻插值](#3.1 最近邻插值)
[3.2 线性插值(Linear Interpolation)](#3.2 线性插值(Linear Interpolation))
[3.3 双线性插值(Bilinear Interpolation)](#3.3 双线性插值(Bilinear Interpolation))
[3.4 均值插值(Average Interpolation)](#3.4 均值插值(Average Interpolation))
1.本章主要学习内容概述
图像放大是数字图像处理中最基础的操作之一,其本质是在保持图像原有内容与结构的前提下,通过算法增加图像的像素总数,将低分辨率图像转换为高分辨率图像,从而满足显示、打印等实际需求。在数字图像中,每一个像素都对应着固定的空间位置与灰度值,原始图像的像素网格是离散且有限的,当对图像进行放大时,新生成的高分辨率图像会出现大量未知像素点,这些像素点在原始图像中没有直接对应的灰度信息,因此必须通过插值处理对这些未知点进行数值估算。
2.图像放大
在进行图像放大前,首先需要完成坐标映射,这是所有插值算法的前置步骤。设原始图像尺寸为M×N,即宽度为M个像素,高度为N个像素;设定放大倍数为k(k>1),则放大后的目标图像尺寸为M′×N′=kM×kN。对于目标图像中任意一个像素点(x′,y′),需要找到其在原始图像中对应的浮点坐标(x,y),坐标映射关系为:

由于计算出的x、y通常为非整数,而原始图像的像素坐标均为整数,因此无法直接获取该点的灰度值,必须通过后续插值算法计算。
3. 图像插值
3.1 最近邻插值
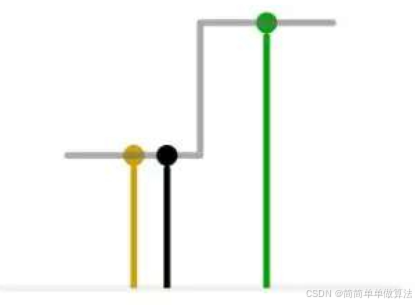
最近邻插值是所有插值算法中原理最简单、计算速度最快的一种,其核心思想是就近取值:将目标图像像素映射到原始图像的浮点坐标后,不进行复杂的加权计算,直接选取距离该浮点坐标最近的整数坐标像素的灰度值,作为目标像素的灰度值。该算法完全保留原始像素的数值,不做任何修改,因此也被称为零阶插值。其插值过程示意图如下:
其实现步骤如下:
步骤1:坐标映射。对目标图像的每一个像素点(x′ ,y′),通过放大倍数计算其在原始图像中的浮点坐标(x,y)。
步骤2:坐标取整。对浮点坐标、 进行四舍五入操作,得到最邻近的整数坐标(x0 ,y0),该坐标对应原始图像中一个真实存在的像素点。
步骤3:灰度赋值。直接将原始图像中(x0,y0)点的灰度值f(x0,y0赋值给目标图像的(x′,y′)点,完成该像素的插值计算。
步骤4:遍历全图。重复上述步骤,完成目标图像所有像素的计算,最终生成放大后的图像。
3.2 线性插值(Linear Interpolation)
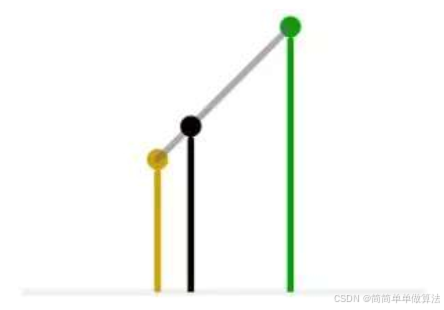
线性插值是一维插值算法,其核心是基于两点之间的直线关系,对中间未知点的数值进行线性估算。该算法假设灰度值在两个已知像素点之间呈线性变化,即两点间的灰度函数为一条直线,通过直线方程计算任意中间点的灰度值。线性插值是更高维度插值(如双线性插值)的基础,由于图像是二维数据,线性插值通常不单独用于图像整体放大,仅用于单方向(水平或垂直)的像素插值。其插值过程示意图如下:
其实现步骤如下:
**步骤1:确定插值区间。**在一维方向上(如水平x轴),找到未知插值点x两侧的两个已知整数坐标点x0和x1,满足x0<x<x1,且两点间距为1个像素单位。
**步骤2:计算权重系数。**根据插值点x与两个已知点的距离,计算线性权重,距离越近的点,对插值结果的贡献越大。
步骤3:线性计算灰度值。利用直线方程,结合两个已知点的灰度值和权重系数,计算插值点的灰度值。
步骤4:单方向插值应用。若用于图像放大,仅在水平或垂直单一方向完成插值,另一方向仍需配合其他方法。
3.3 双线性插值(Bilinear Interpolation)
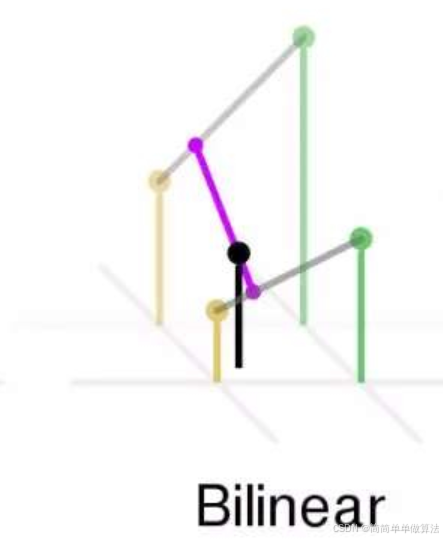
双线性插值是线性插值在二维空间的扩展,也是目前数字图像处理中应用最广泛的图像放大插值算法。其核心是在水平(x 轴)和垂直(y 轴)两个方向分别进行一次线性插值,利用原始图像中距离浮点坐标最近的4 个相邻像素点的灰度值,通过两次线性加权计算,得到未知像素的灰度值。该算法假设像素灰度在二维空间中连续线性变化,相比最近邻插值,能有效消除锯齿效应,提升图像平滑度。其插值过程示意图如下:
其实现步骤如下:
**步骤1:坐标映射。**计算目标图像像素(x′,y′)在原始图像中的浮点坐标(x,y)。
**步骤2:确定4邻域像素。**找到浮点坐标(x,y)周围的4个整数坐标像素点,分别为左上角(x0,y0)、右上角(x1,y0)、左下角(x0,y1)、右下角(x,y1),满足x0=⌊x⌋,x1=x0+1,y0=⌊y⌋,y1=y0+1,其中⌊⋅⌋为向下取整函数。
**步骤3:计算权重系数。**计算水平方向权重u=x−x0,垂直方向权重v=y−y0,u、v的取值范围均为0,1,代表插值点在两个方向上与4邻域像素的相对位置。
步骤4:第一次线性插值(水平方向)。分别对y=y0和y=y1两条水平线上的像素进行线性插值,得到两个中间值f1和f2。
步骤5:第二次线性插值(垂直方向)。对第一步得到的两个中间值进行垂直方向的线性插值,最终得到浮点坐标(x,y)对应的灰度值,即目标图像像素(x′,y′)的灰度值。
步骤6:遍历全图。对目标图像所有像素重复上述步骤,完成图像放大。
3.4 均值插值(Average Interpolation)
均值插值也叫邻域均值插值,其核心思想是算术平均,将目标像素映射到原始图像后,选取该点周围一定范围内的已知像素点,计算这些像素灰度值的平均值,作为目标像素的灰度值。该算法本质是一种简单的低通滤波操作,通过平均化处理抑制像素灰度的突变,平滑图像噪声,同时实现像素插值。均值插值的邻域大小可灵活选择,最常用的是2×2邻域(与双线性插值的4邻域一致),也可选择3×3、4×4等更大邻域。其实现步骤如下:
**步骤1:坐标映射。**计算目标图像像素(x′,y′)对应的原始图像浮点坐标(x,y)。
**步骤2:**确定邻域范围。根据设定的邻域大小,选取浮点坐标(x,y)周围的整数坐标像素集合,常用 2×2邻域,即选取(x0,y0)、(x0,y1)、(x1,y0)、 (x1,y1)四个像素。
**步骤3:灰度值累加。**将邻域内所有像素的灰度值依次累加,得到灰度总和。
步骤4:计算平均值。用灰度总和除以邻域内像素的总数量,得到的平均值即为目标像素的灰度值
步骤5:遍历全图。对目标图像所有像素执行上述操作,完成插值放大。