目录
1.摘要
卫星任务规划问题(SMPP)是典型的 NP-hard 组合优化问题,针对全敏捷对地观测卫星主动成像任务中任务选择、可变观测时长和累积时变成像质量需协同优化的难点,本文提出了融合动态规划与五种元启发式算法的混合框架 DPA-MHA。其中,第一阶段利用动态规划精确生成可行观测路径,第二阶段借助针对性设计的元启发式算子优化观测开始时间与持续时长。
2.问题陈述
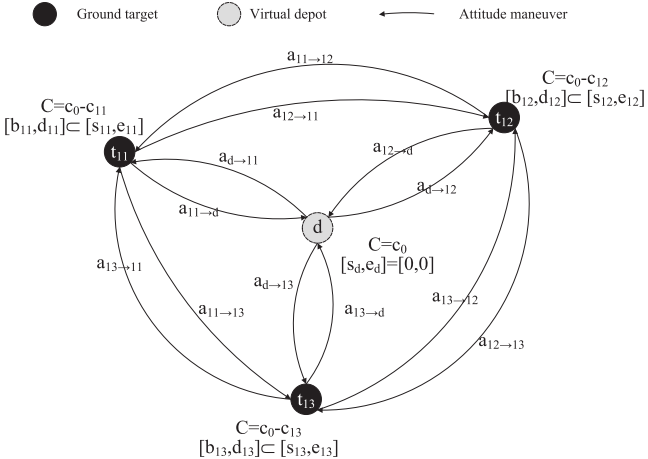
Al-SMPP 可视为 VRPTW 在卫星主动成像场景下的扩展,在可见时间窗、能量和姿态转换
约束下,同时决策是否观测、何时观测、观测多久。目标函数为
min f ( S ) = 1 − ∑ t i ∈ T ∑ o j ∈ O ( x i j p i Q ( b i j , d i j ) ) ∑ t i ∈ T p i \min f(S)=1-\frac{\sum_{t_i\in T}\sum_{o_j\in O}\left(x_i^jp_iQ(b_i^j,d_i^j)\right)}{\sum_{t_i\in T}p_i} minf(S)=1−∑ti∈Tpi∑ti∈T∑oj∈O(xijpiQ(bij,dij))
通过最大化目标优先级与累积成像质量加权后的总收益,最小化损失收益,并受限于单次
观测约束、最小时长约束、VTW 约束、轨道能量约束和任务切换时间约束。
3.结合元启发式算法的动态规划方法
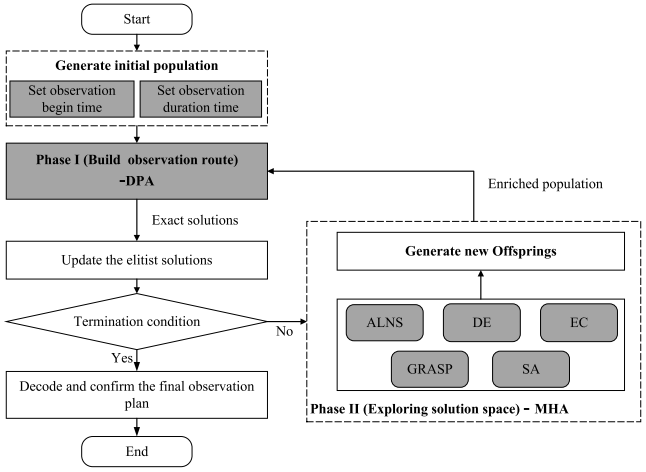
阶段 I(构建观测路径):确定初始参数与观测路径
第一阶段旨在确定卫星的观测路径,即选择被观测的目标及其顺序。为简化问题,文中固定各目标的观测时长 d i ′ d_i^{\prime} di′和观测时刻 b i ′ j b_i^{\prime j} bi′j ,并忽略能量约束,使该阶段仅保留 0-1 决策变量 x i j x_i^j xij ,从而将问题转化为一个 0-1 规划模型:
min f ( S ) = 1 − ∑ t i ∈ T ∑ o j ∈ O ( x i j p i Q ( b i ′ j , d i ′ ) ) ∑ t i ∈ T p i \min f(S)=1-\frac{\sum_{t_i\in T}\sum_{o_j\in O}\left(x_i^jp_iQ(b_i'^j,d_i')\right)}{\sum_{t_i\in T}p_i} minf(S)=1−∑ti∈Tpi∑ti∈T∑oj∈O(xijpiQ(bi′j,di′))
并满足每个目标至多观测一次及任务间姿态转换时间约束。由于各目标的观测开始时刻和持续时间已知,可按开始时刻排序后将该阶段进一步转化为仅考虑转移时间的 VRPTW,再利用动态规划精确求解,其状态转移方程为
f ( x i + 1 ) = max ( f ( x i ) ) + p i + 1 Q ( b i + 1 ′ , d i + 1 ′ ) f(x_{i+1})=\max(f(x_i))+p_{i+1}Q(b_{i+1}',d_{i+1}') f(xi+1)=max(f(xi))+pi+1Q(bi+1′,di+1′)
其中, f ( x i ) f(x_i) f(xi)表示到第 i i i个目标为止的最大累积图像质量。
阶段 II(解空间探索):优化观测方案
第二阶段为了弥补第一阶段动态规划简化过强的问题,在满足原模型主要约束的基础上,将AI-SMPP转化为同时优化任务收益与能量利用率的双目标问题:
min { f 1 ( S ) = 1 − ∑ t i ∈ T ∑ o j ∈ O ( x i j p i Q ( b i j , d i j ) ) ∑ t i ∈ T T p i , f 2 ( S ) = T E E , \min \begin{cases} f_1(S) = 1 - \dfrac{\sum_{t_i \in T} \sum_{o_j \in O} \left(x_i^j p_i Q(b_i^j, d_i^j)\right)}{\sum_{t_i \in T} T p_i}, \\ f_2(S) = \dfrac{T E}{E}, \end{cases} min⎩ ⎨ ⎧f1(S)=1−∑ti∈TTpi∑ti∈T∑oj∈O(xijpiQ(bij,dij)),f2(S)=ETE,
其中
E = O E + T E . E = OE + TE. E=OE+TE.
为充分探索解空间,本文引入 ALNS、DE、GRASP、EC 和 SA 五种元启发式算法,对观测开始时刻和持续时间进行联合优化,并采用混合编码将二者表示为
b i j = s i j + y i j ( e i j − s i j ) , d i j = z i j ( e i j − s i j ) b_i^j = s_i^j + y_i^j(e_i^j - s_i^j), \quad d_i^j = z_i^j(e_i^j - s_i^j) bij=sij+yij(eij−sij),dij=zij(eij−sij)
自适应层与终止准则
本文提出了一种自适应算子选择机制,根据新解对当前解集和 Pareto 前沿的改进程度,
为各算子赋予不同得分,并据此动态更新其权重。权重更新公式为
ω i α = ( 1 − λ ) ω i α + λ π i α ∑ j = 1 ∣ I α ∣ π j α , \omega_i^\alpha=(1-\lambda)\omega_i^\alpha+\lambda\frac{\pi_i^\alpha}{\sum_{j=1}^{|I^\alpha|}\pi_j^\alpha}, ωiα=(1−λ)ωiα+λ∑j=1∣Iα∣πjαπiα,
其中, λ \lambda λ用于控制当前表现对权重调整的影响。采用轮盘赌机制,按利用率
r i α = ω i α ∑ j = 1 ∣ I α ∣ ω j α r_i^\alpha=\frac{\omega_i^\alpha}{\sum_{j=1}^{|I^\alpha|}\omega_j^\alpha} riα=∑j=1∣Iα∣ωjαωiα
算法结合 box-method 引导搜索更快讲入非支配区域并逼沂 Pareto 前沿。
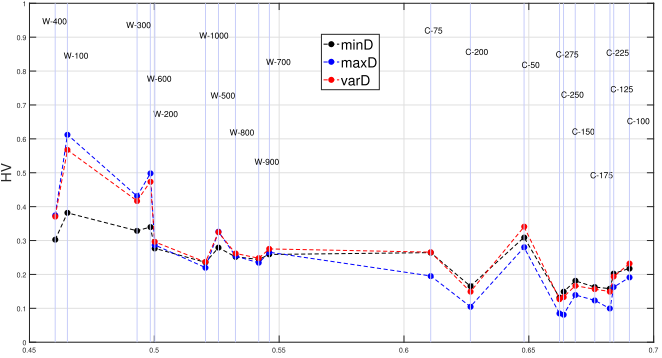
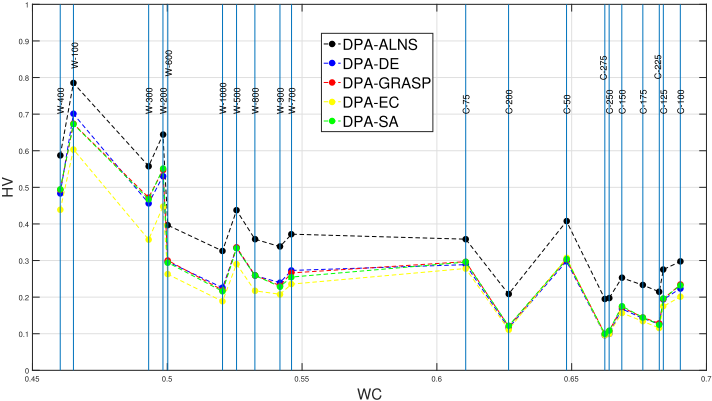
4.结果展示
5.参考文献
1 Zhang Z, Yao F, Chang Z, et al. A hybrid swarm intelligence and dynamic programming framework for active-imaging satellite mission planning problemJ. Swarm and Evolutionary Computation, 2026, 104: 102373.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx