在计算机视觉领域,人脸检测 与人脸关键点定位是最基础、最核心的技术之一,广泛应用于美颜滤镜、人脸识别、表情分析、智能美颜、安防监控等场景。对于初学者而言,OpenCV 和 dlib 是入门人脸视觉任务的两大神器:OpenCV 提供了轻量级的人脸检测算法,dlib 则凭借高精度的关键点检测模型脱颖而出。
本文将结合四段实战代码,从零带你实现静态图片人脸检测 、视频流实时人脸检测 、68 点人脸关键点标注 、人脸关键点轮廓绘制四大核心功能,全程手把手教学,代码可直接运行,适合计算机视觉初学者学习实践。
一、环境准备:OpenCV 与 dlib 安装
在开始编码前,我们需要配置 Python 开发环境,安装核心依赖库:
- OpenCV:用于图像 / 视频读取、绘制、窗口显示等基础操作;
- dlib:用于高精度人脸检测与关键点定位;
- numpy:辅助处理关键点坐标数据。
打开命令行,执行以下安装命令:
bash
# 安装OpenCV
pip install opencv-python
# 安装dlib(Windows/Linux/Mac通用,建议使用Python3.7~3.10版本)
pip install dlib
# 安装numpy
pip install numpy关键文件准备
dlib 的 68 点人脸关键点检测需要预训练模型文件:shape_predictor_68_face_landmarks.dat
- 下载地址:dlib 官方模型库
- 下载后解压,将
.dat文件放在代码同级目录下; - 同时准备测试图片(如
qunxiang2.png、datou.png)和测试视频(如smile.mp4)。
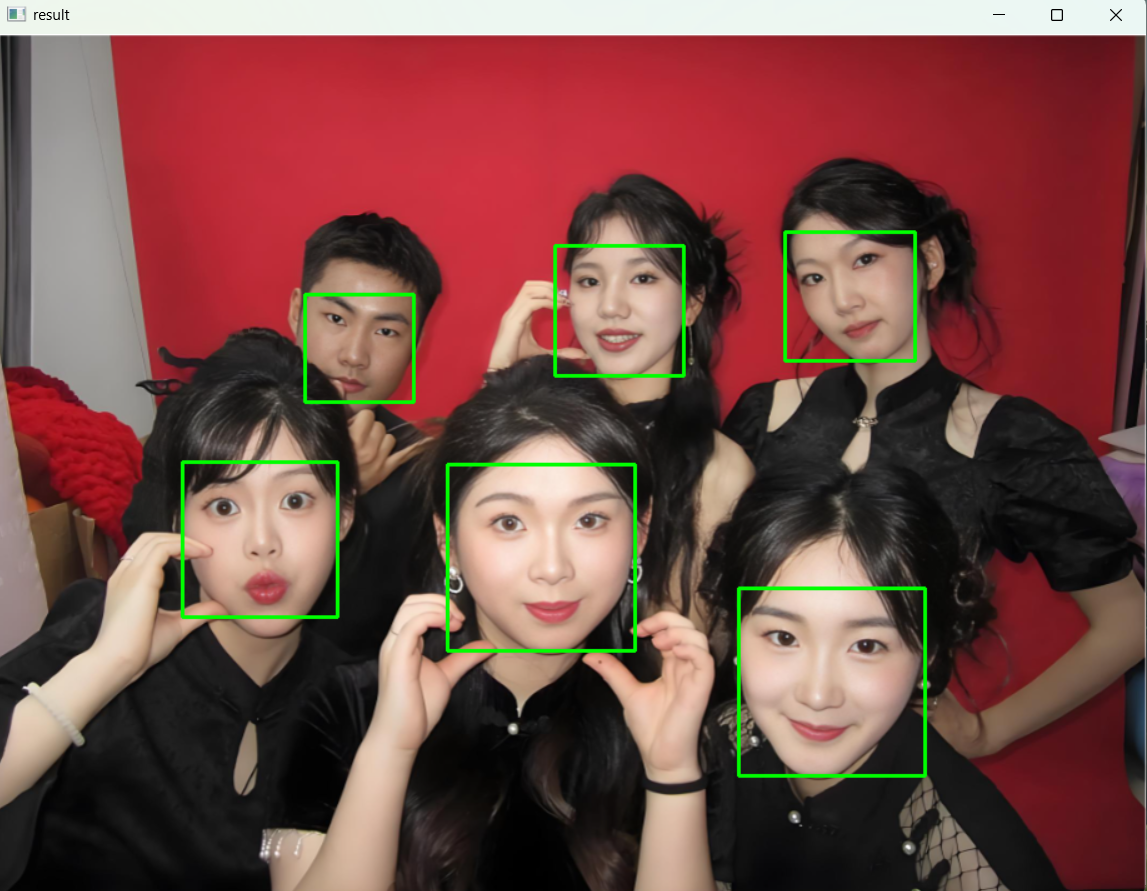
二、静态图片人脸检测(dlib 实现)
人脸检测是人脸视觉任务的第一步,核心目标是在图像中定位出人脸的坐标位置。第一段代码实现了基于 dlib 的静态图片人脸检测,并通过矩形框标注人脸区域。
完整代码
python
import cv2
import dlib
# 初始化dlib人脸检测器
detector = dlib.get_frontal_face_detector()
# 读取本地图片
img = cv2.imread('qunxiang2.png')
# 检测人脸:参数0表示不进行图像金字塔上采样,提升检测速度
faces = detector(img, 0)
# 遍历检测到的所有人脸
for face in faces:
# 获取人脸矩形框的左上角和右下角坐标
x1 = face.left()
y1 = face.top()
x2 = face.right()
y2 = face.bottom()
# 在图像上绘制绿色矩形框,线宽为2
cv2.rectangle(img, (x1, y1), (x2, y2), (0, 255, 0), 2)
# 显示结果图像
cv2.imshow('result', img)
cv2.waitKey(0) # 等待按键输入
cv2.destroyAllWindows() # 关闭所有窗口代码核心解析
- 检测器初始化 :
dlib.get_frontal_face_detector()加载 dlib 内置的人脸检测器,基于 HOG(方向梯度直方图)算法,检测精度高、速度快; - 图像读取 :
cv2.imread()读取本地图片,返回 BGR 格式的图像数组; - 人脸检测 :
detector(img, 0)执行检测,返回人脸矩形框对象列表,每个对象包含人脸的坐标信息; - 绘制矩形框 :
cv2.rectangle()根据人脸坐标绘制标注框,(0,255,0)代表绿色,2代表线宽。
运行效果
运行代码后,会弹出窗口显示测试图片,所有检测到的人脸都会被绿色矩形框标注,即使是多人合照也能精准识别。
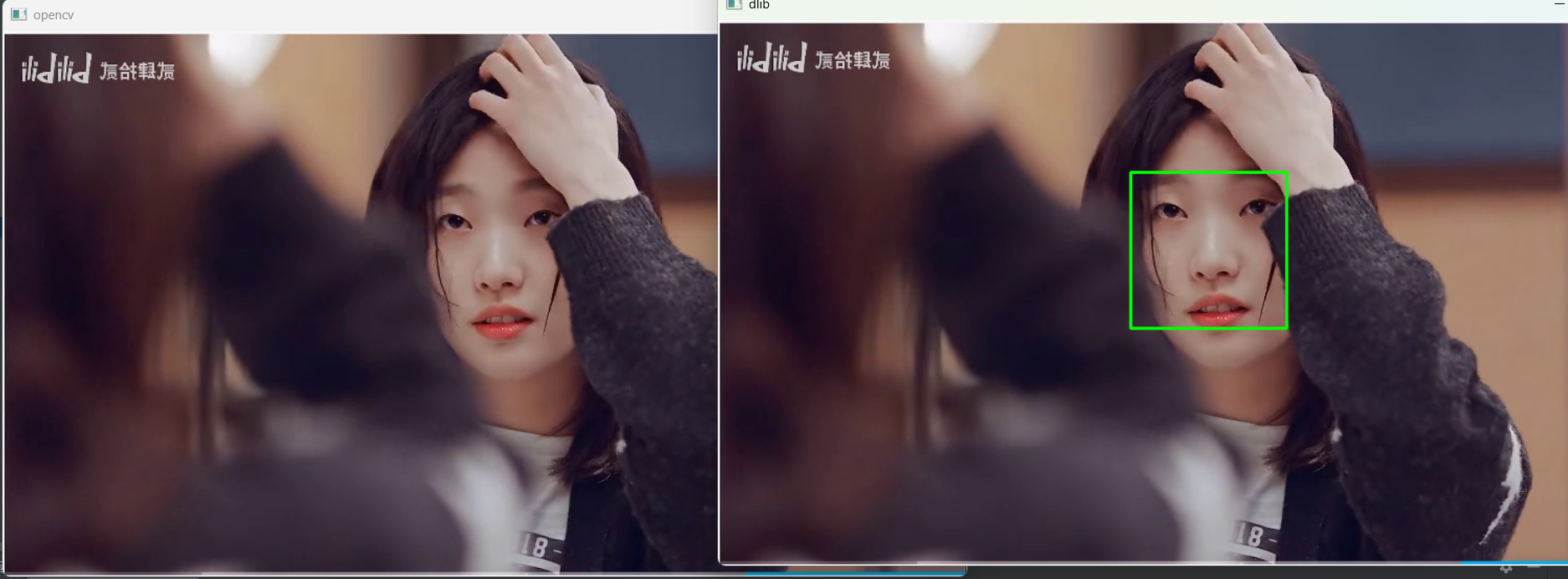
三、视频流实时人脸检测(OpenCV+Dlib 双算法对比)
静态图片检测仅适用于离线场景,而实际应用中(如直播、监控)需要视频流实时检测 。第三段代码结合了OpenCV 的 Haar 特征分类器 和dlib 检测器,实现视频人脸检测,并对比两种算法的效果。
完整代码
python
import cv2
import dlib
# 加载OpenCV的Haar人脸检测器
faceCascade = cv2.CascadeClassifier('haarcascade_frontalface_default.xml')
# 初始化dlib人脸检测器
detector = dlib.get_frontal_face_detector()
# 读取视频文件(0为调用电脑摄像头)
cap = cv2.imread('smile.mp4')
while True:
# 逐帧读取视频
ret, image = cap.read()
# 水平翻转图像(模拟摄像头自拍视角)
image = cv2.flip(image, 1)
imaged = image.copy() # 复制图像用于dlib检测显示
# 视频读取结束则退出循环
if not ret:
break
# 转换为灰度图(人脸检测对灰度图处理效率更高)
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 1. dlib人脸检测
faces = detector(gray, 0)
for face in faces:
x1 = face.left()
y1 = face.top()
x2 = face.right()
y2 = face.bottom()
cv2.rectangle(imaged, (x1, y1), (x2, y2), (0, 255, 0), 2)
# 2. OpenCV Haar人脸检测
faces = faceCascade.detectMultiScale(gray, scaleFactor=1.1, minNeighbors=16, minSize=(5, 5))
for (x, y, w, h) in faces:
cv2.rectangle(image, (x, y), (x+w, y+h), (0, 255, 0), 2)
# 双窗口分别显示两种算法的检测结果
cv2.imshow('opencv', image)
cv2.imshow('dlib', imaged)
# 按下ESC键退出
key = cv2.waitKey(1)
if key == 27:
break
# 释放视频资源
cap.release()
cv2.destroyAllWindows()代码核心解析
- 视频读取 :
cv2.VideoCapture()支持读取本地视频和调用摄像头(参数为 0); - 灰度图转换 :
cv2.cvtColor()将彩色图转为灰度图,减少计算量,提升检测速度; - OpenCV Haar 检测 :
detectMultiScale()是核心函数,scaleFactor表示缩放比例,minNeighbors表示目标检测次数,值越大误检越少; - 实时显示 :通过
while循环逐帧处理视频,实现实时检测效果。
双算法对比
| 算法 | 优点 | 缺点 |
|---|---|---|
| OpenCV Haar | 速度极快、轻量级 | 易受光照影响、误检率高 |
| dlib HOG | 精度高、抗干扰能力强 | 速度略慢于 Haar |
实战建议:对检测速度要求高选 OpenCV Haar,对检测精度要求高选 dlib。
四、68 点人脸关键点定位(基础标注)
人脸关键点定位是在人脸检测的基础上,标记出眼睛、鼻子、嘴巴、脸部轮廓等关键位置。dlib 提供的68 点人脸关键点模型是行业标准,第四段代码实现了关键点的标注与索引显示。
完整代码
python
import numpy as np
import cv2
import dlib
# 读取测试图片
img = cv2.imread('datou.png')
# 初始化人脸检测器
detector = dlib.get_frontal_face_detector()
# 检测人脸
faces = detector(img, 0)
# 加载68点关键点预测模型
predictor = dlib.shape_predictor("shape_predictor_68_face_landmarks.dat")
# 遍历人脸
for face in faces:
# 预测关键点坐标
shape = predictor(img, face)
# 将关键点转换为numpy数组,方便处理
landmarks = np.array([[p.x, p.y] for p in shape.parts()])
# 遍历所有关键点
for idx, point in enumerate(landmarks):
pos = (point[0], point[1])
# 绘制绿色实心圆点
cv2.circle(img, pos, 2, color=(0, 255, 0), thickness=-1)
# 标注关键点索引
cv2.putText(img, str(idx), pos, cv2.FONT_HERSHEY_SIMPLEX, 0.4,
(255, 255, 255), 1, cv2.LINE_AA)
# 显示结果
cv2.imshow('img', img)
cv2.waitKey()
cv2.destroyAllWindows()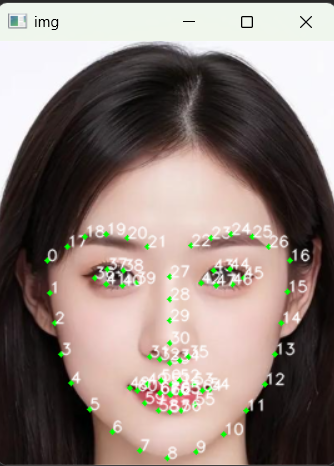
代码核心解析
- 关键点模型加载 :
shape_predictor()加载预训练的 68 点模型,这是关键点检测的核心; - 关键点预测 :
predictor(img, face)输入图像和人脸框,输出 68 个关键点的坐标; - 坐标转换:将 dlib 的关键点对象转换为 numpy 数组,方便遍历和绘制;
- 绘制关键点 :
cv2.circle()绘制圆点标记关键点,cv2.putText()标注每个关键点的索引。
68 点关键点分布规则
dlib 的 68 个关键点有固定的分区规则,这是后续人脸轮廓绘制的基础:
- 0~16:脸部轮廓
- 17~21:左眉毛
- 22~26:右眉毛
- 27~35:鼻子
- 36~41:左眼
- 42~47:右眼
- 48~60:嘴巴外轮廓
- 61~67:嘴巴内轮廓
五、人脸关键点轮廓绘制(进阶应用)
基于 68 点关键点,我们可以绘制人脸轮廓、眼睛轮廓、嘴巴轮廓,实现美颜、面具贴图等进阶效果。第五段代码封装了画线和凸包绘制函数,实现完整的人脸轮廓标注。
完整代码
python
import numpy as np
import cv2
import dlib
# 绘制连续线段函数:连接指定区间的关键点
def drawLine(start, end):
pts = shape[start:end]
for l in range(1, len(pts)):
ptA = tuple(pts[l - 1])
ptB = tuple(pts[l])
cv2.line(image, ptA, ptB, (0, 255, 0), 2)
# 绘制凸包函数:封闭眼睛、嘴巴等区域
def drawConvexHull(start, end):
Facial = shape[start:end+1]
mouthHull = cv2.convexHull(Facial)
cv2.drawContours(image, [mouthHull], -1, (0, 255, 0), 2)
# 读取图像
image = cv2.imread('datou.png')
detector = dlib.get_frontal_face_detector()
faces = detector(image, 0)
predictor = dlib.shape_predictor("shape_predictor_68_face_landmarks.dat")
for face in faces:
# 获取关键点坐标
shape = predictor(image, face)
shape = np.array([[p.x, p.y] for p in shape.parts()])
# 绘制眼睛、嘴巴凸包轮廓
drawConvexHull(36, 41) # 左眼
drawConvexHull(42, 47) # 右眼
drawConvexHull(48, 59) # 嘴巴外轮廓
drawConvexHull(60, 67) # 嘴巴内轮廓
# 绘制脸部、眉毛、鼻子轮廓线
drawLine(0, 17) # 脸部轮廓
drawLine(17, 22) # 左眉毛
drawLine(22, 27) # 右眉毛
drawLine(27, 36) # 鼻子轮廓
# 显示结果
cv2.imshow('Frame', image)
cv2.waitKey()
cv2.destroyAllWindows()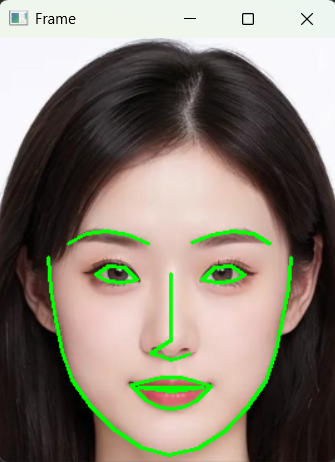
代码核心解析
- 函数封装 :
drawLine():遍历指定区间的关键点,用线段连接,实现线性轮廓绘制;drawConvexHull():通过cv2.convexHull()计算凸包,cv2.drawContours()绘制封闭轮廓,适用于眼睛、嘴巴等弧形区域;
- 分区绘制:根据 68 点关键点的索引规则,分别绘制脸部、眉毛、眼睛、鼻子、嘴巴的轮廓。
运行效果
运行代码后,图像中的人脸会被完整的绿色轮廓包裹,脸部轮廓、眉毛、眼睛、嘴巴、鼻子都被精准标注,这是实现美颜滤镜、人脸特效的核心基础。
六、总结
本文通过四段实战代码,完整讲解了基于 OpenCV 和 dlib 的人脸检测与关键点定位全流程:从静态图片检测到视频实时检测,从基础关键点标注到进阶轮廓绘制,覆盖了人脸视觉任务的核心知识点。
OpenCV 的轻量级与 dlib 的高精度相结合,为初学者提供了最友好的入门方案。无论是日常学习、课程设计,还是项目开发,本文的代码都可以直接复用和修改。计算机视觉的学习重在实践,建议大家动手运行代码,替换测试素材,深入理解每个函数的作用。
人脸技术是人工智能领域的热门方向,掌握基础的人脸检测与关键点定位,是通往人脸识别、表情分析、智能美颜等高阶应用的第一步。希望本文能帮助你快速入门计算机视觉,开启你的视觉开发之旅!