目录
[4.1 四旋翼飞行器动力学与状态空间模型](#4.1 四旋翼飞行器动力学与状态空间模型)
[4.2 扩展卡尔曼滤波](#4.2 扩展卡尔曼滤波)
[4.3 EKF状态估计](#4.3 EKF状态估计)
1.课题概述
四旋翼飞行器是典型的欠驱动、强耦合非线性系统,其飞行状态包含位置、姿态、线速度与角速度等关键信息。在实际飞行中,GPS、陀螺仪等传感器会引入测量噪声,直接使用原始数据无法满足高精度控制需求。扩展卡尔曼滤波通过对非线性系统进行线性化近似,在噪声环境下实现对真实状态的最优估计,是四旋翼状态感知与稳定控制的核心技术。
2.系统仿真结果
3.核心程序或模型
版本:Matlab2024b
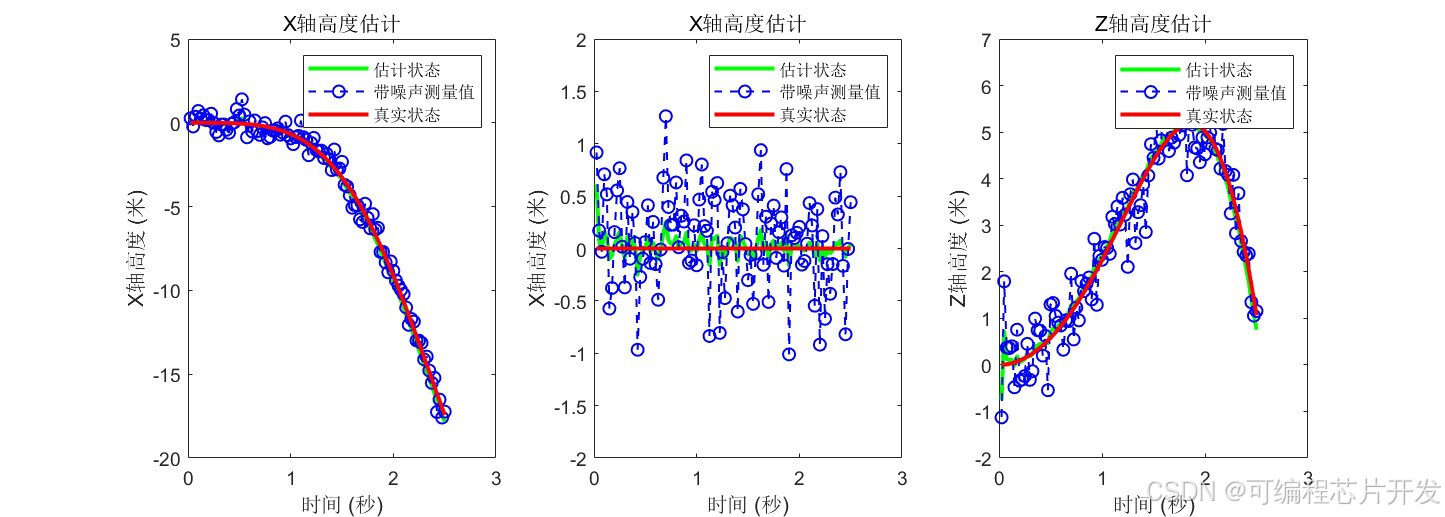
figure
subplot(131);
plot(t,St_est(1,:),'g','LineWidth',2);
hold on
plot(t,Yceli(1,:),'b--o','LineWidth',1);
hold on
plot(t,del_x_kp1(1,:),'r','LineWidth',2);
title('X轴高度估计');
xlabel('时间 (秒)');
ylabel('X轴高度 (米)');
legend('估计状态','带噪声测量值','真实状态');
subplot(132);
plot(t,St_est(2,:),'g','LineWidth',2);
hold on
plot(t,Yceli(2,:),'b--o','LineWidth',1);
hold on
plot(t,del_x_kp1(2,:),'r','LineWidth',2);
title('X轴高度估计');
xlabel('时间 (秒)');
ylabel('X轴高度 (米)');
legend('估计状态','带噪声测量值','真实状态');
ylim(-2,2);
subplot(133);
plot(t,St_est(3,:),'g','LineWidth',2);
hold on
plot(t,Yceli(3,:),'b--o','LineWidth',1);
hold on
plot(t,del_x_kp1(3,:),'r','LineWidth',2);
title('Z轴高度估计');
xlabel('时间 (秒)');
ylabel('Z轴高度 (米)');
legend('估计状态','带噪声测量值','真实状态');
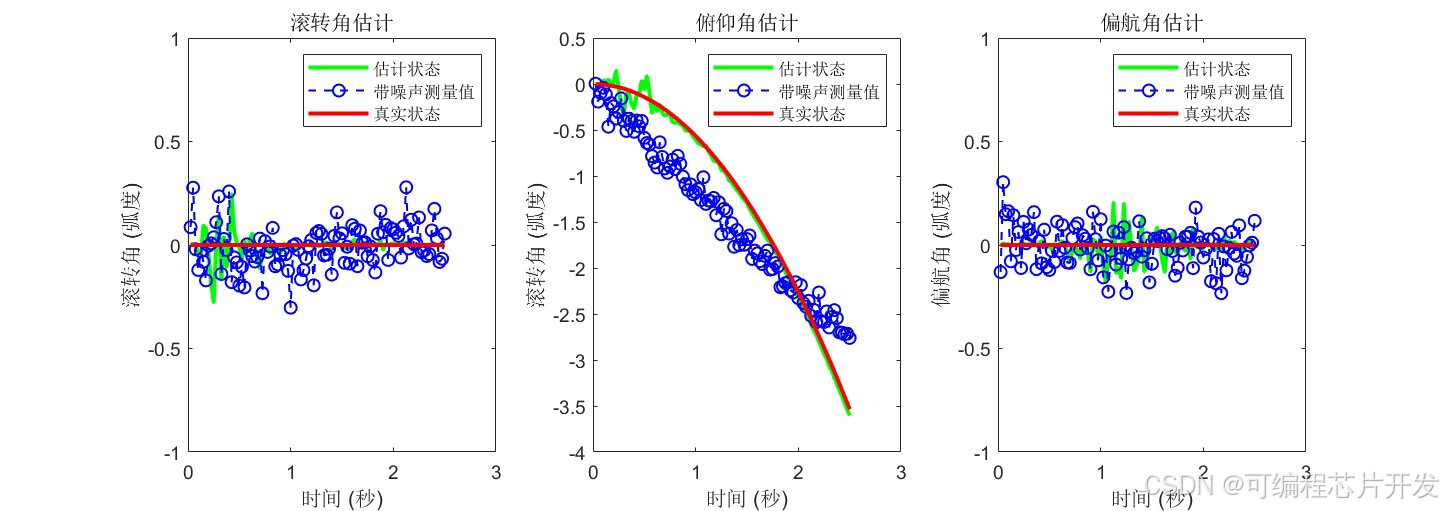
figure
subplot(131);
plot(t,St_est(4,:),'g','LineWidth',2);
hold on
plot(t,Yceli(4,:),'b--o','LineWidth',1);
hold on
plot(t,del_x_kp1(4,:),'r','LineWidth',2);
title('滚转角估计');
xlabel('时间 (秒)');
ylabel('滚转角 (弧度)');
legend('估计状态','带噪声测量值','真实状态');
ylim(-1,1);
subplot(132);
plot(t,St_est(5,:),'g','LineWidth',2);
hold on
plot(t,Yceli(5,:),'b--o','LineWidth',1);
hold on
plot(t,del_x_kp1(5,:),'r','LineWidth',2);
title('俯仰角估计');
xlabel('时间 (秒)');
ylabel('滚转角 (弧度)');
legend('估计状态','带噪声测量值','真实状态');
subplot(133);
plot(t,St_est(6,:),'g','LineWidth',2);
hold on
plot(t,Yceli(6,:),'b--o','LineWidth',1);
hold on
plot(t,del_x_kp1(6,:),'r','LineWidth',2);
title('偏航角估计');
xlabel('时间 (秒)');
ylabel('偏航角 (弧度)');
legend('估计状态','带噪声测量值','真实状态');
ylim(-1,1);
149
4.系统原理简介
4.1 四旋翼飞行器动力学与状态空间模型
EKF以12维状态向量作为系统核心表征量,包含三维位置、三维姿态角、三维线速度和三维角速度,其向量形式为:

四旋翼在机体坐标系与地理坐标系转换下,动力学呈现强非线性,连续时间状态方程可表示为:

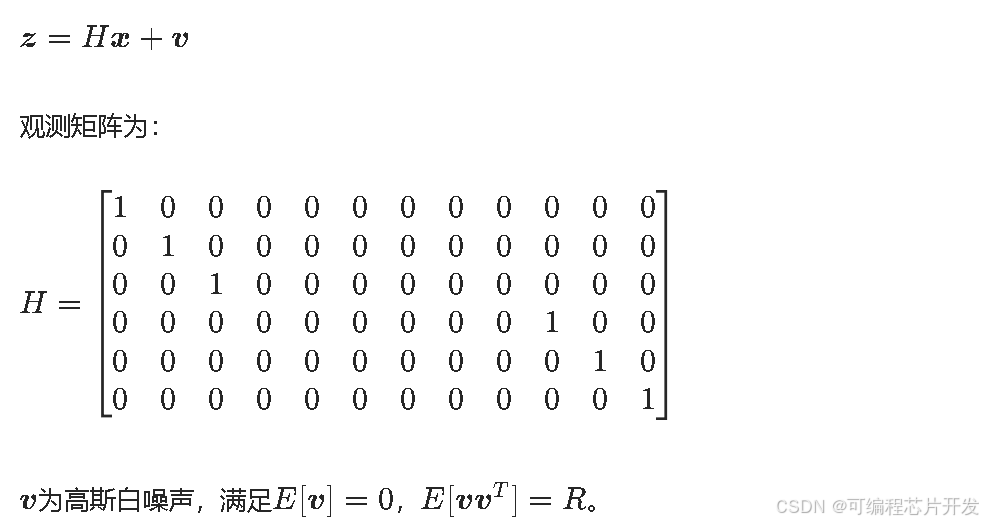
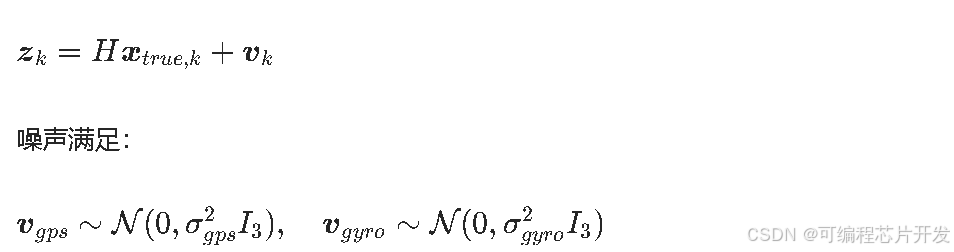
系统可观测变量为位置与姿态角速度,观测方程为线性形式:
4.2 扩展卡尔曼滤波
标准卡尔曼滤波仅适用于线性系统,而无人机系统存在三角函数与耦合项,必须使用EKF。其核心思想是在每一步滤波周期内,对非线性函数f(x,u)在当前状态估计点进行一阶泰勒展开,舍弃高阶项,将非线性系统近似为线性系统,再执行卡尔曼预测与更新。
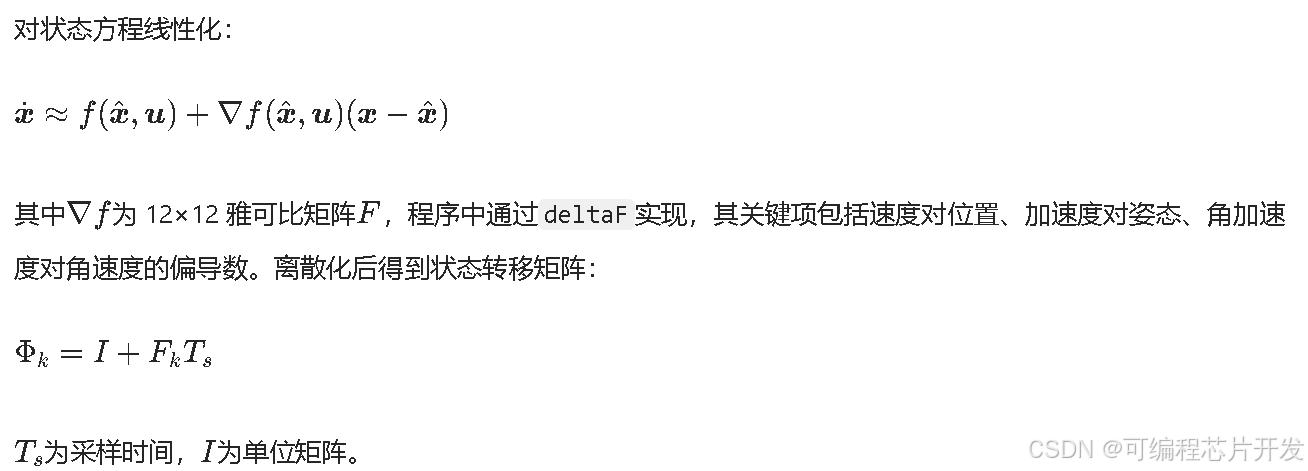
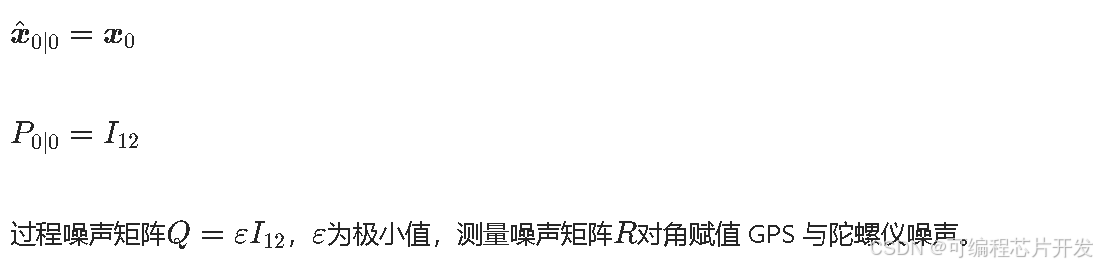
EKF依赖过程噪声与测量噪声的统计特性,过程噪声协方差Q表征模型不确定性,测量噪声协方差R表征传感器精度,程序中分别对 GPS 与陀螺仪设置不同噪声强度,贴合实际硬件特性。
4.3 EKF状态估计
初始化参数与状态
设定无人机质量、转动惯量、采样时间、总仿真时间,初始化状态向量与协方差矩阵:
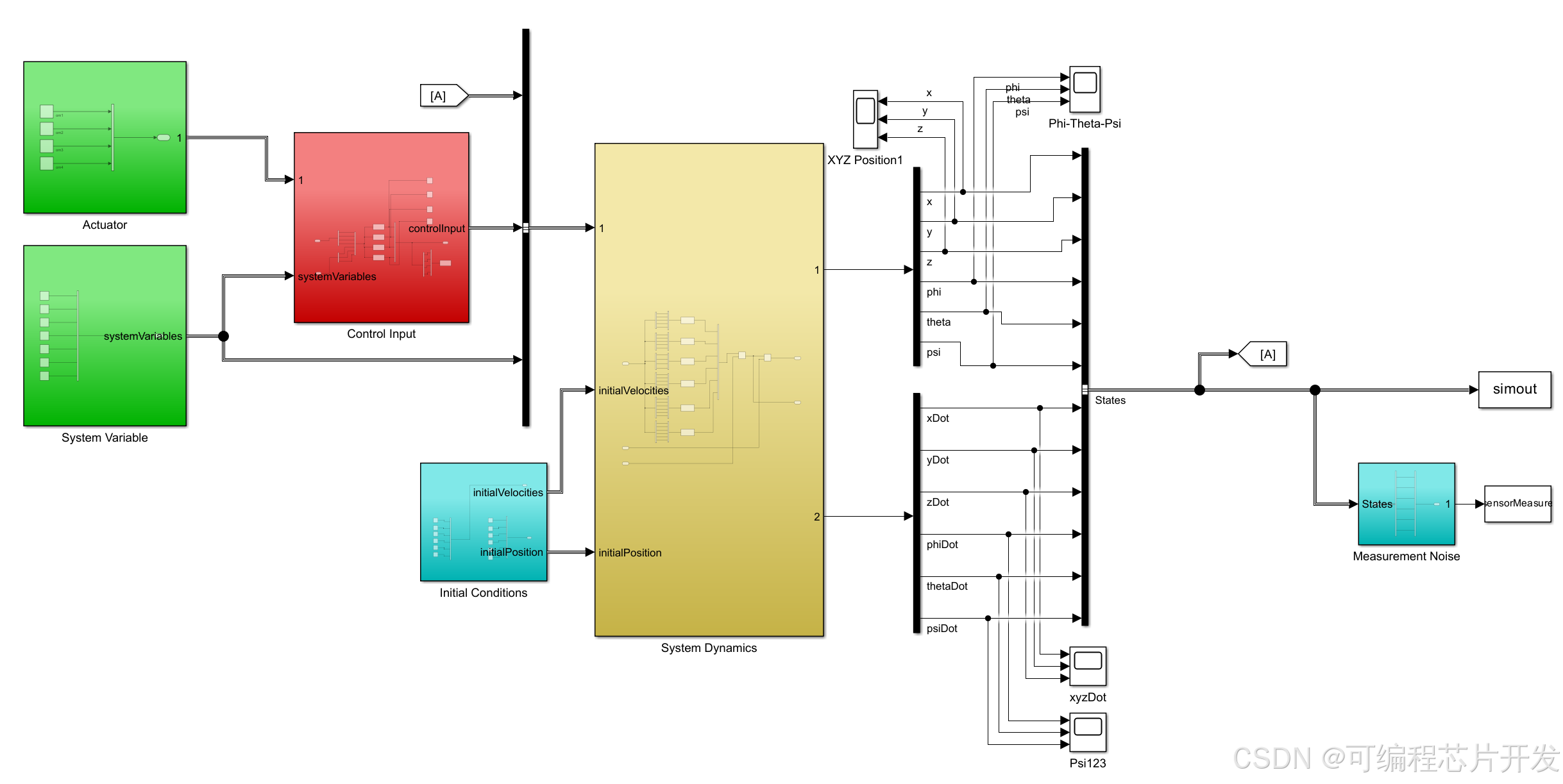
Simulink联合仿真获取真实状态与带噪测量值
通过调用四旋翼动力学模型,获取真实状态xtrue,并叠加高斯噪声生成传感器测量值:
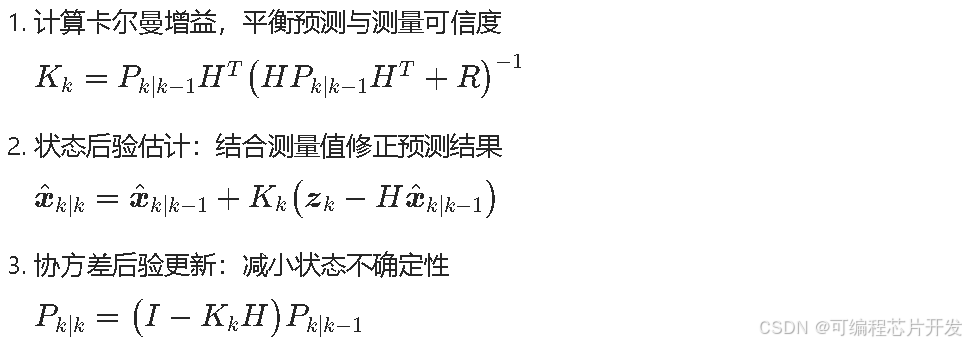
时间更新(预测阶段)
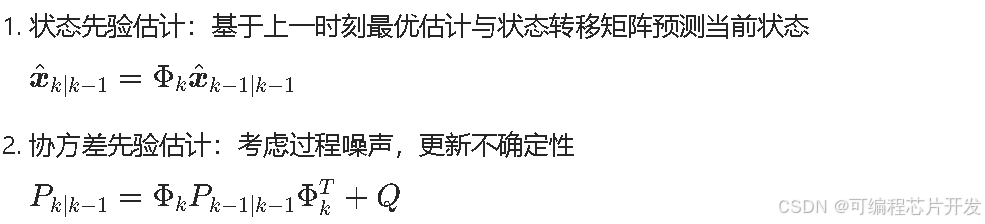
测量更新(校正阶段)
5.完整工程文件
v v
关注后,GZH回复关键词:a33
或回复关键词:EKFUAV