1.视觉系统的构成
(1)硬件:相机、镜头、光源、附件、电脑。

(2)步骤: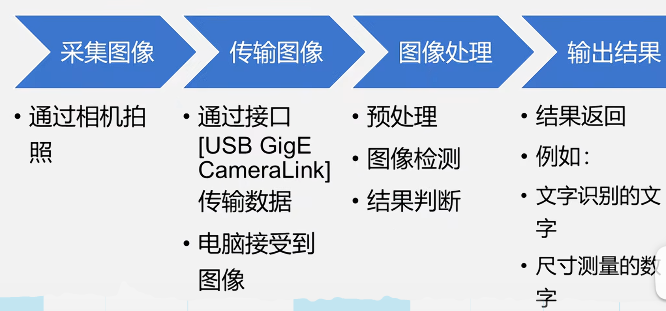
2.工业相机
工业相机 = 图像采集 传感器,作用:把光信号 → 电信号 → 数字图像,送给电脑 / 控制器处理。
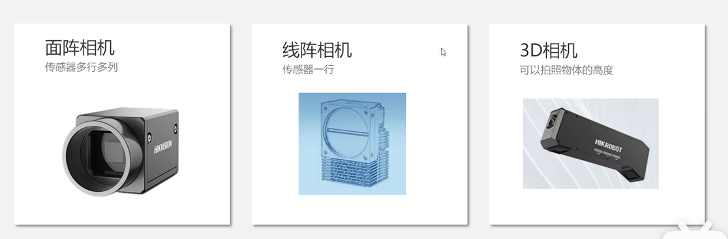
(1)种类:面阵相机(传感器多行多列)、线阵相机(传感器一行)、3D相机(可以拍照物体高度)。
(2)工业相机品牌:

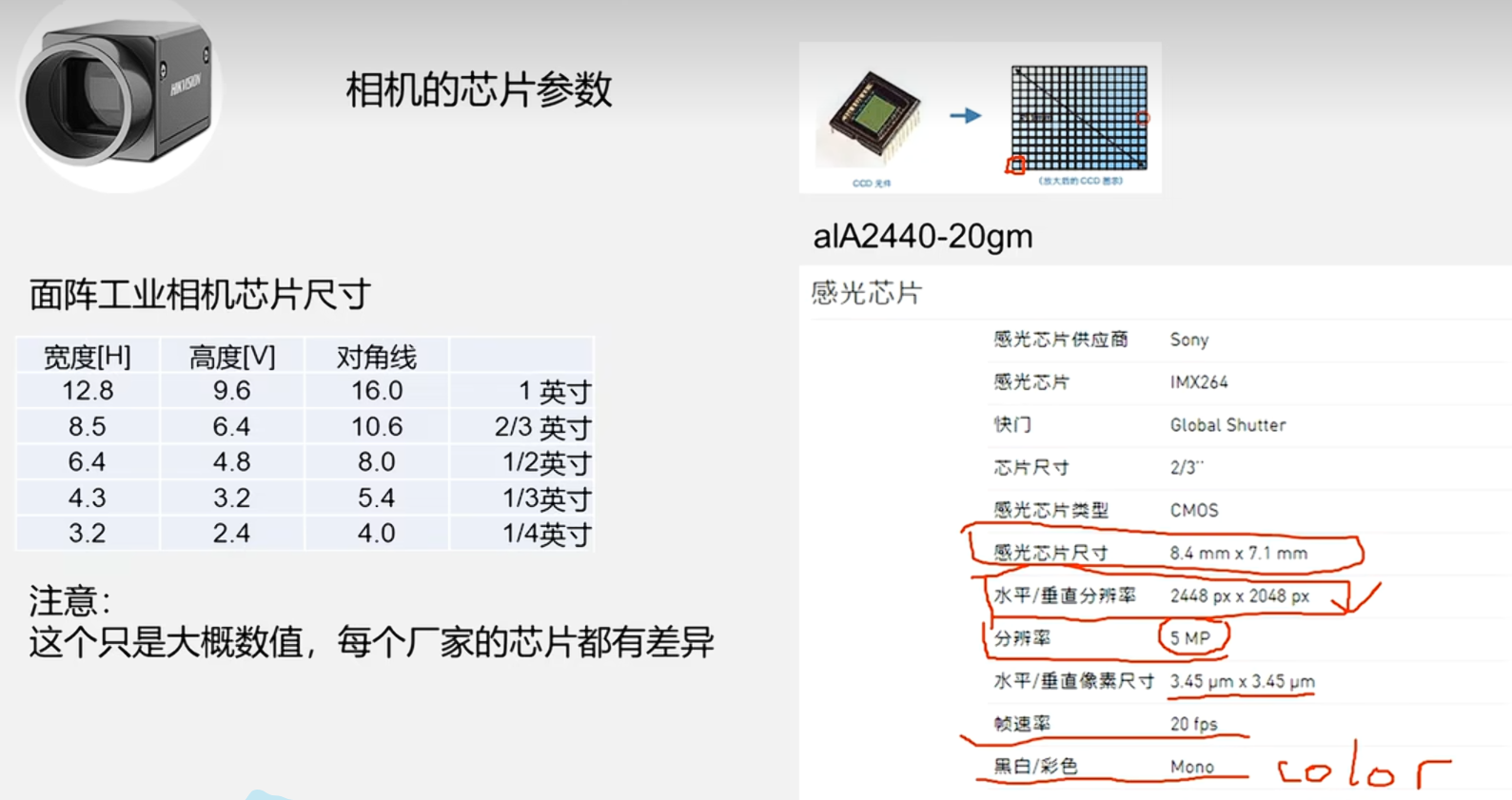
(3)相机参数:位深、分辨率、像素、色彩、传感器靶面尺寸。
A.位深:常用1Byte。位深越大,传感器精度越高,但内存占用大。
像素越小,图像越黑;像素越大(看位深),图像越亮。
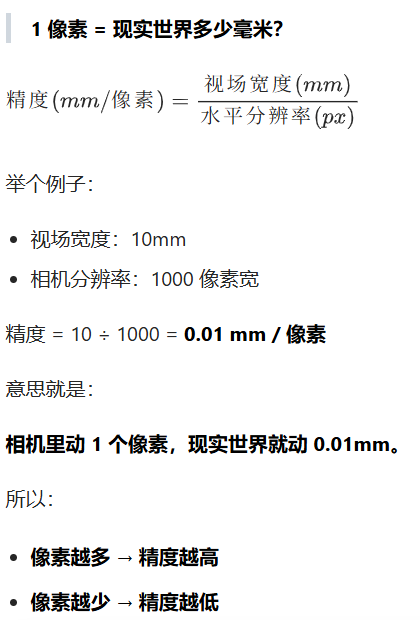
B.分辨率(宽×高):分横向和纵向。(传感器数量数列数)分辨率 = 横向有多少像素 ×视场宽度mm (水平分辨率x 纵向有多少像素)。分辨率直接决定识别精度:精度(mm/像素)=视场高度mm/垂直分辨率px
分辨率越高,识别精度越高。
常用分辨率:
640 × 480 (VGA,30 万像素)
1280 × 1024 (130 万像素,工业最常用)
1600 × 1200 (200 万像素)
1920 × 1080 (1080P,200 万像素)
2592 × 1944 (500 万像素,高精度常用)
4000 × 3000 (1200 万像素,大视场高精度)
C.像素(微米):像素 = 构成图像的最小小方块一张图片,就是由几百万个小方块整齐排列组成的。每个小方块只有一种颜色 / 一种亮度。
你可以把它理解成:图像的最小原子,不能再切分。
在工业相机里,像素就是:传感器上的一个感光点,分辨率最低的基本单元:一个像素(传感器的一个点)。
像素越大 → 感光面积大 → 更亮、噪声更低、画质更好
像素越小 → 同样大小传感器能塞更多像素 → 分辨率更高
D.色彩:彩色相机(RGB)、黑白相机。
F.传感器靶面尺寸:靶面越大,画质越好
镜头靶面必须 ≥ 相机靶面,否则出现黑边
同样焦距下,靶面越大 → 视场越大
相机的感光芯片尺寸 = 靶面尺寸
靶面尺寸计算:相机靶面指的是感光芯片的对角线长度
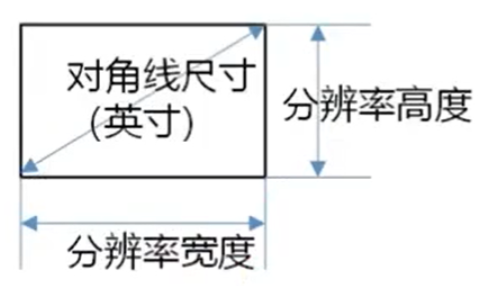
(1)计算:
芯片宽度(W) = 像元宽度(μm)× 水平有效像素数(H_pixels)÷ 1000
芯片高度(H) = 像元高度(μm)× 垂直有效像素数(V_pixels)÷ 1000
对角线尺寸 = √(W² + H²)(勾股定理)
(2)说明:
像元尺寸(如3.45μm)为单个感光元件的边长,单位微米(μm)。
分辨率(如2448×2048)表示水平与垂直方向的有效像素数。
除以1000将微米转换为毫米(mm)。
最终靶面尺寸以**宽度×高度(mm)**表示,对角线长度可通过勾股定理计算。
(3)示例:
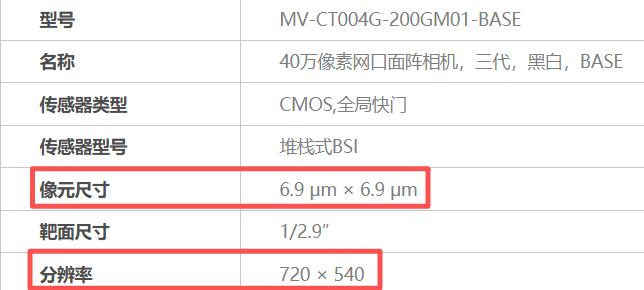
宽度=720×6.9/1000=4.968mm
高度=540×6.9/1000=3.726mm
对角线=√4.968 ×4.968+3.726×3.726=6.21mm
实际对角线长度(mm) ≈ 光学格式标称值(英寸)× 16(1英寸=16mm)
靶面尺寸=6.21/16=0.388125英寸≈1/2.9(0.344827586)
相机其他参数:
分辨率5MP=500万像素上下
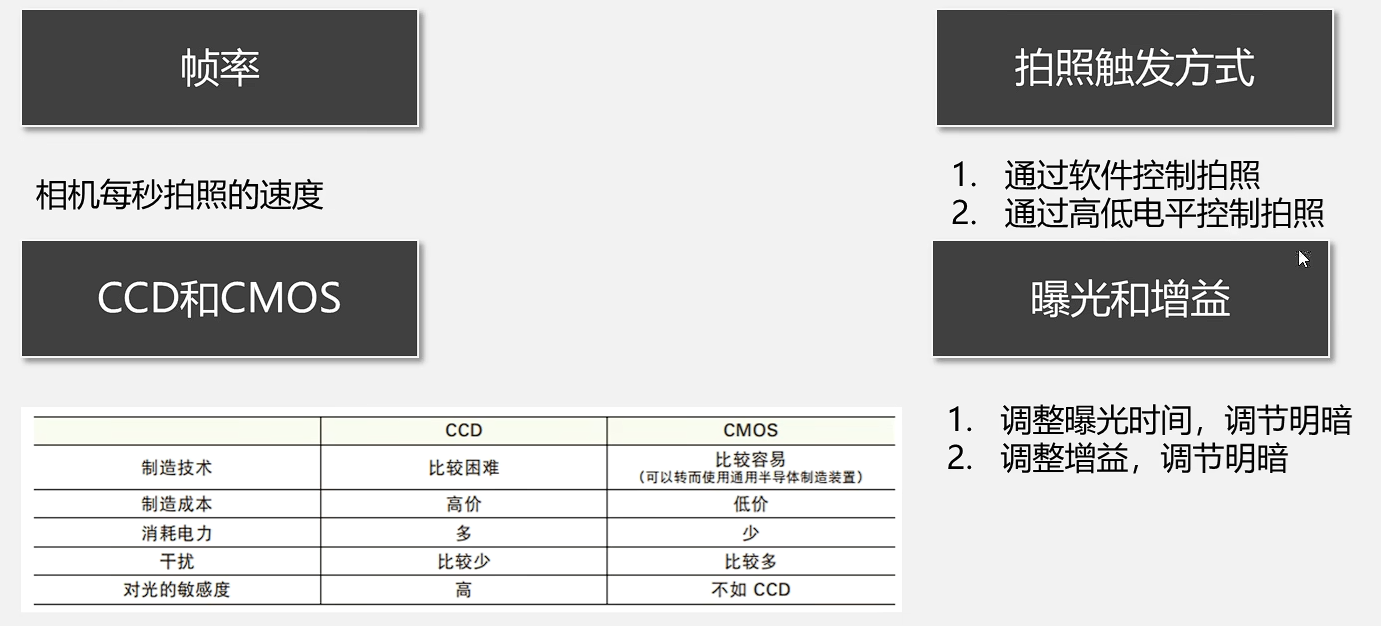
A.帧率:分辨率越高 → 帧率越低
高速流水线必须高帧率相机
常用:15fps ~ 30fps,帧率≈带宽/分辨率×位深
B.曝光时间(μs /ms)
曝光是指相机传感器在拍摄过程中接收光线并转化为电信号的时间长度
曝光量=光照强度×曝光时间×光圈大小
曝光方式:往往会影响最大帧率,帧率决定了整个相机的采集图像是时间。
相机采集图像的时间就是帧率的倒数
帧率:每秒相机采集多少图像
最高帧率往往对应着相机的最小支持曝光时间
全局曝光(全局快门)((Global Shutter) :整个芯片同时曝光
卷帘曝光(卷帘快门)( Rolling Shutter) :逐行滚动曝光
在抓拍快速运动的物体是,卷帘快门的方式会产生图像斜变。因此卷帘快门更适合静止拍摄,全局曝光的芯片适合高速运动中的物体拍摄。

曝光越短 → 冻结运动,但画面暗
曝光越长 → 画面亮,但易模糊
工业常用范围:10μs ~ 10ms
C.动态范围 & 信噪比 SNR
动态范围:强光与弱光都能看清的能力
信噪比:图像干净程度,值越高越好
这两个参数决定复杂光照下的成像能力
D.触发方式 Trigger:软件触发与高低电平触发:适合工业流水线快速识别
(4)相机通信接口:
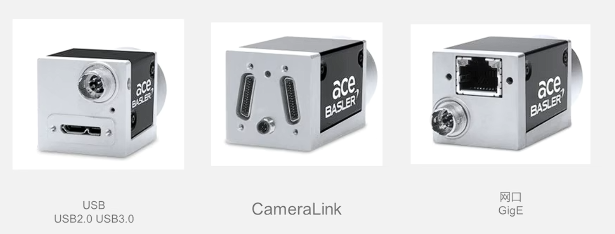
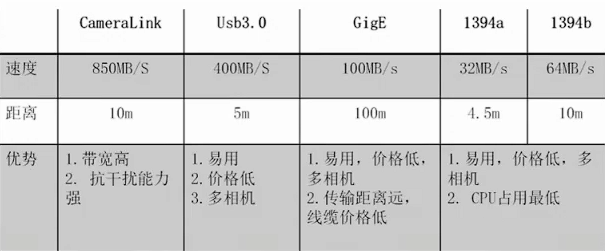
USB3.0:通用接口,螺孔容易松,传输不稳定,传输速率较高,适用拍照速度要求较快跟用场景。超过5m后传输速度与稳定性下降。
CameraLink:传输速率非常高,但成本高,需要专门线缆和采集卡才能采集,适合需要特殊的高速相机。
网口:工业用的最多,连接可靠(有卡扣),传输距离比USB长,可稳定传输20-30m(最高可达100m),无特殊需求一般用网线。
(5)相机的镜头接口:
较多使用C安装,CS安装。
C安装座:从镜头安装基准面到焦点(拍照CCD面)的距离是17.526mm;
CS安装座:其镜头安装基准面到焦点的距离是12.5mm。
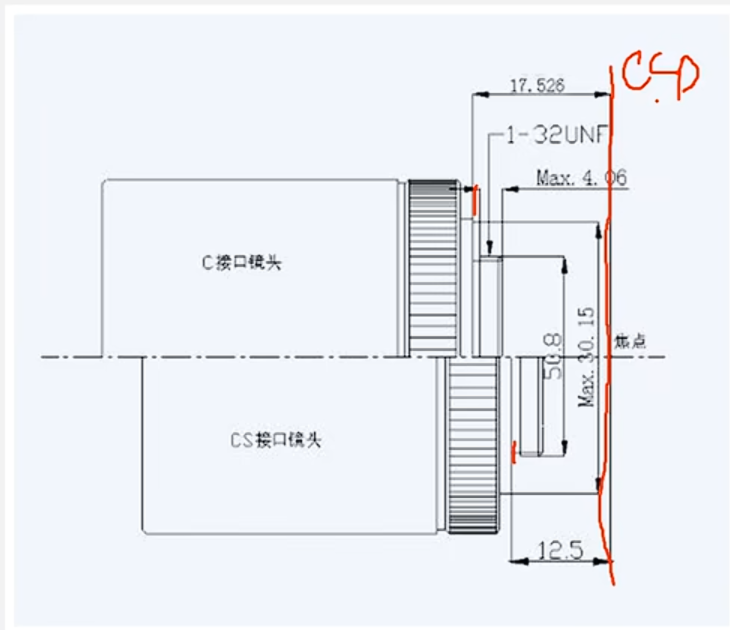
CS镜头要装在C型相机上,加5mm转接环可实现。
3.传感器类型
- CCD vs CMOS
CCD:画质好、噪声低、均匀性好速度慢、功耗高、贵,现在高端测量还在用
CMOS:速度快、集成度高、便宜、低功耗目前工业相机90% 以上都是 CMOS - 全局快门 Global Shutter
所有像素同时曝光、同时读出→ 拍高速运动物体无畸变、无拖影→ 工业视觉必选 - 卷帘快门 Rolling Shutter
逐行曝光、逐行读出→ 运动物体会倾斜、变形→ 只适合静止物体,工业基本不用
4.相机选型
1.确定视场大小 FOV,视野范围需覆盖被检测对象,并预留一定余量(通常为1.2-1.5倍目标尺寸)
2.确定精度要求 → 计算分辨率→选定相机分辨率→验证实际精度=视场/分辨率
(若无精度,则找到你检测对象中,最小的检测物体的宽高尺寸 。
实例:0.3mm×0.3mm,要用3-5个像素去表示,得到单像素精度是 0.3/3=0.1mm)
3.看物体是否运动 → 选全局快门 + 帧率(帧率 >= 1/检测时间)
4.看安装距离 → 配合选镜头焦距
5.看传输距离 → 选接口(GigE/USB)
6.看光照环境 → 选像素大小、靶面
7.确定黑白 / 彩色
高速相机用cameralink接口。
所需分辨率= 视场物理尺寸/目标识别精度(理论像素=视场物理尺寸/目标识别精度)
理论像素精度=视场物理尺寸/相机对应方向的分辨率(像素数)
示例1:
检测工件大小:20mm × 15mm
要求识别精度:≤ 0.02 mm / 像素
工件在流水线运动,速度一般
安装距离大概 100mm~150mm
传输距离约 5 米
步骤 1:计算所需分辨率=视场/精度
精度公式:精度视场分辨率变形得:分辨率视场精度
我们取视场比工件稍大一点:
水平视场 FOVw = 25 mm
垂直视场 FOVh = 20 mm
要求精度:0.02 mm
水平分辨率 = 25 / 0.02 = 1250 像素
垂直分辨率 = 20 / 0.02 = 1000 像素
→ 相机分辨率至少要 1280×1024 以上
步骤 2:选定相机分辨率
满足 ≥1280×1024 的标准相机:→ 130 万像素相机(1280×1024)
步骤 3:验证实际精度=视场/分辨率
水平实际精度 = 25 / 1280 ≈ 0.0195 mm
垂直实际精度 = 20 / 1024 ≈ 0.0195 mm
满足 ≤0.02 mm 的要求 ✅
步骤 4:选择快门类型
工件在运动→ 必须用 全局快门
步骤 5:选择颜色
只做尺寸、定位检测→ 选 黑白相机(精度高、噪声小)
步骤 6:选择接口
传输距离约 5 米,要稳定→ 选 GigE 网口相机
步骤 7:帧率>= 1/检测时间
130 万像素 GigE 相机帧率一般在 30fps 左右→ 满足普通流水线速度
最终选型结果
130 万像素黑白全局快门 GigE 工业相机分辨率:1280×1024
示例2:
被测工件:微小零件,尺寸 8 mm × 6 mm
视觉精度要求:≤ 0.01 mm / 像素
工件在流水线上运动,需要清晰抓拍不拖影
安装距离较短,约 80--120 mm
相机安装在电脑旁,传输距离不长
步骤 1:确定视场大小
工件 8×6 mm,视场要稍微留余量:
水平视场 FOVw = 10 mm
垂直视场 FOVh = 8 mm
步骤 2:计算所需分辨率
公式:分辨率=视场/精度
水平分辨率 = 10 ÷ 0.01 = 1000 像素
垂直分辨率 = 8 ÷ 0.01 = 800 像素
也就是说:相机至少需要 1000×800 以上 的分辨率。
步骤 3:选择相机型号
满足 ≥1000×800 的标准工业相机:→ 130 万像素:1280×1024
但因为是高精度项目,为了稳定、留余量,工程上通常会选更高一档:→ 500 万像素:2592×1944
步骤 4:验算实际精度=视场/分辨率
方案 A:用 130 万像素(1280×1024)
水平精度 = 10 ÷ 1280 ≈ 0.0078 mm
垂直精度 = 8 ÷ 1024 ≈ 0.0078 mm
远优于 0.01 mm 要求 ✅
方案 B:用 500 万像素(2592×1944)
水平精度 = 10 ÷ 2592 ≈ 0.00386 mm
垂直精度 = 8 ÷ 1944 ≈ 0.00411 mm
精度更高,适合微小缺陷、精密测量 ✅✅
步骤 5:其他关键选型
快门类型运动物体 → 必须 全局快门
颜色高精度测量 → 选 黑白相机
接口距离短、即插即用 → USB3.0如需远距离 / 多相机组网 → GigE
镜头高精度必须配 远心镜头,消除畸变
最终选型结论
根据工件 8mm×6mm,取视场 10mm×8mm,按 0.01mm 精度计算,所需分辨率≥1000×800。为保证高精度测量稳定性,选用500 万像素黑白全局快门工业相机,实际精度约 0.004mm,满足高精度检测需求。