文章目录
-
- [1. Modbus协议概述](#1. Modbus协议概述)
- [1.1 什么是Modbus协议](#1.1 什么是Modbus协议)
- [1.2 Modbus协议的发展历程](#1.2 Modbus协议的发展历程)
- [2. Modbus协议类型详解](#2. Modbus协议类型详解)
-
- [2.1 Modbus-RTU](#2.1 Modbus-RTU)
-
- [2.1.1 RTU帧结构](#2.1.1 RTU帧结构)
- [2.1.2 RTU帧边界识别](#2.1.2 RTU帧边界识别)
- [2.1.3 主从通讯流程](#2.1.3 主从通讯流程)
- [2.2 Modbus-ASCII](#2.2 Modbus-ASCII)
-
- [2.2.1 ASCII帧结构](#2.2.1 ASCII帧结构)
- [2.3 Modbus-TCP](#2.3 Modbus-TCP)
-
- [2.3.1 TCP帧结构](#2.3.1 TCP帧结构)
- [2.4 Modbus Plus(ModbusPlus / MB+)](#2.4 Modbus Plus(ModbusPlus / MB+))
- [2.5 三种主流模式对比](#2.5 三种主流模式对比)
- [3. Modbus数据模型](#3. Modbus数据模型)
-
- [3.1 四种数据类型](#3.1 四种数据类型)
-
- [3.1.1 线圈(Coils)- 0区](#3.1.1 线圈(Coils)- 0区)
- [3.1.2 离散输入(Discrete Inputs)- 1区](#3.1.2 离散输入(Discrete Inputs)- 1区)
- [3.1.3 输入寄存器(Input Registers)- 3区](#3.1.3 输入寄存器(Input Registers)- 3区)
- [3.1.4 保持寄存器(Holding Registers)- 4区](#3.1.4 保持寄存器(Holding Registers)- 4区)
- [3.2 数据类型汇总表](#3.2 数据类型汇总表)
- [3.3 地址系统详解](#3.3 地址系统详解)
-
- [3.3.1 两种地址表示方式](#3.3.1 两种地址表示方式)
- [3.3.2 地址转换规则](#3.3.2 地址转换规则)
- [4. Modbus功能码详解](#4. Modbus功能码详解)
-
- [4.1 功能码概述](#4.1 功能码概述)
- [4.2 基础读写类功能码(0x01-0x04/0x05/0x06/0x0F/0x10)](#4.2 基础读写类功能码(0x01-0x04/0x05/0x06/0x0F/0x10))
-
- [4.2.1 功能码01:读线圈(Read Coils)](#4.2.1 功能码01:读线圈(Read Coils))
- [4.2.2 功能码02:读离散输入(Read Discrete Inputs)](#4.2.2 功能码02:读离散输入(Read Discrete Inputs))
- [4.2.3 功能码03:读保持寄存器(Read Holding Registers)](#4.2.3 功能码03:读保持寄存器(Read Holding Registers))
- [4.2.4 功能码04:读输入寄存器(Read Input Registers)](#4.2.4 功能码04:读输入寄存器(Read Input Registers))
- [4.2.5 功能码05:写单个线圈(Write Single Coil)](#4.2.5 功能码05:写单个线圈(Write Single Coil))
- [4.2.6 功能码06:写单个保持寄存器(Write Single Register)](#4.2.6 功能码06:写单个保持寄存器(Write Single Register))
- [4.2.7 功能码15(0x0F):写多个线圈(Write Multiple Coils)](#4.2.7 功能码15(0x0F):写多个线圈(Write Multiple Coils))
- [4.2.8 功能码16(0x10):写多个保持寄存器(Write Multiple Registers)](#4.2.8 功能码16(0x10):写多个保持寄存器(Write Multiple Registers))
- [4.3 进阶控制类功能码(0x15-0x16)](#4.3 进阶控制类功能码(0x15-0x16))
-
- [4.3.1 功能码21(0x15):强制多点线圈](#4.3.1 功能码21(0x15):强制多点线圈)
- [4.3.2 功能码22(0x16):预置单个寄存器](#4.3.2 功能码22(0x16):预置单个寄存器)
- [4.4 诊断维护类功能码(0x07-0x08/0x14)](#4.4 诊断维护类功能码(0x07-0x08/0x14))
-
- [4.4.1 功能码07:读异常状态](#4.4.1 功能码07:读异常状态)
- [4.4.2 功能码08:诊断](#4.4.2 功能码08:诊断)
- [4.4.3 功能码20(0x14):读从站ID](#4.4.3 功能码20(0x14):读从站ID)
- [4.5 功能码速查表](#4.5 功能码速查表)
- [4.6 异常响应](#4.6 异常响应)
- 5.Modbus校验算法详解
-
- [5.1 CRC-16校验算法(RTU模式)](#5.1 CRC-16校验算法(RTU模式))
-
- [5.1.1 CRC校验原理](#5.1.1 CRC校验原理)
- [5.1.2 CRC计算算法(C语言实现)](#5.1.2 CRC计算算法(C语言实现))
- [5.1.3 CRC快速验证](#5.1.3 CRC快速验证)
- [5.2 LRC校验算法(ASCII模式)](#5.2 LRC校验算法(ASCII模式))
-
- [5.2.1 LRC校验原理](#5.2.1 LRC校验原理)
- [5.2.2 LRC计算算法(C语言实现)](#5.2.2 LRC计算算法(C语言实现))
- [5.3 校验算法对比](#5.3 校验算法对比)
- [6. 数据解析方案](#6. 数据解析方案)
-
- [6.1 32位浮点数解析](#6.1 32位浮点数解析)
-
- [6.1.1 IEEE754浮点数解析](#6.1.1 IEEE754浮点数解析)
- [6.1.2 字节序问题](#6.1.2 字节序问题)
- [6.2 BCD码解析](#6.2 BCD码解析)
- [6.3 数据类型转换示例](#6.3 数据类型转换示例)
- [7. 物理接口详解与接线规范](#7. 物理接口详解与接线规范)
-
- [7.1 RS-232与RS-485接口对比](#7.1 RS-232与RS-485接口对比)
-
- [7.1.1 RS-232接口](#7.1.1 RS-232接口)
- [7.1.2 RS-485接口](#7.1.2 RS-485接口)
- [7.1.3 RS-232 vs RS-485 对比总结](#7.1.3 RS-232 vs RS-485 对比总结)
- [7.2 RS-485接线规范](#7.2 RS-485接线规范)
-
- [7.2.1 接线方式](#7.2.1 接线方式)
- [7.2.2 终端电阻设置](#7.2.2 终端电阻设置)
- [7.3 通信参数设置](#7.3 通信参数设置)
-
- [7.3.1 串口参数](#7.3.1 串口参数)
- [7.3.2 通信超时设置](#7.3.2 通信超时设置)
- [7.4 批量操作限制](#7.4 批量操作限制)
- 8.Modbus实战案例
-
- [8.1 案例1:PLC控制变频器完整流程](#8.1 案例1:PLC控制变频器完整流程)
- [8.2 案例2:读取电力仪表数据](#8.2 案例2:读取电力仪表数据)
- [8.3 案例3:批量控制照明回路](#8.3 案例3:批量控制照明回路)
- [8.4 案例4:PLC程序实现(SCL语言)](#8.4 案例4:PLC程序实现(SCL语言))
- [9. 调试技巧与工具推荐](#9. 调试技巧与工具推荐)
-
- [9.1 调试排查顺序](#9.1 调试排查顺序)
- [9.2 常见问题排查](#9.2 常见问题排查)
-
- [9.2.1 通信超时](#9.2.1 通信超时)
- [9.2.2 校验错误](#9.2.2 校验错误)
- [9.2.3 异常响应](#9.2.3 异常响应)
- [9.3 调试工具推荐](#9.3 调试工具推荐)
-
- [9.3.1 PC端工具](#9.3.1 PC端工具)
- [9.3.2 Wireshark抓包分析Modbus TCP](#9.3.2 Wireshark抓包分析Modbus TCP)
- [9.3.3 在线工具](#9.3.3 在线工具)
- [9.3.4 手机端工具](#9.3.4 手机端工具)
- 10.Modbus协议进阶
-
- [10.1 Modbus网关](#10.1 Modbus网关)
- [10.2 Modbus安全](#10.2 Modbus安全)
-
- [10.2.1 安全风险分析](#10.2.1 安全风险分析)
- [10.2.2 安全防护措施](#10.2.2 安全防护措施)
- [10.2.3 Modbus Secure(下一代安全方案)](#10.2.3 Modbus Secure(下一代安全方案))
- [10.3 协议演进:Modbus vs OPC UA](#10.3 协议演进:Modbus vs OPC UA)
- [10.4 Modbus与物联网(IoT)集成](#10.4 Modbus与物联网(IoT)集成)
-
- [10.4.1 Modbus over MQTT架构](#10.4.1 Modbus over MQTT架构)
- [10.4.2 常见IoT网关方案](#10.4.2 常见IoT网关方案)
- [10.4.3 Node.js实现示例](#10.4.3 Node.js实现示例)
- [10.4.4 Python pymodbus完整示例](#10.4.4 Python pymodbus完整示例)
- 11.学习资源汇总
-
- [11.1 官方规范文档](#11.1 官方规范文档)
- [11.2 优质教程链接](#11.2 优质教程链接)
-
- [11.2.1 基础教程](#11.2.1 基础教程)
- [11.2.2 进阶教程](#11.2.2 进阶教程)
- [11.2.3 实战教程](#11.2.3 实战教程)
- [11.3 在线工具](#11.3 在线工具)
- [11.4 开发库推荐](#11.4 开发库推荐)
-
- [11.4.1 Python库](#11.4.1 Python库)
- [11.4.2 C/C++库](#11.4.2 C/C++库)
- 12.常见问题解答(FAQ)
-
- [Q1:Modbus RTU和TCP有什么区别?](#Q1:Modbus RTU和TCP有什么区别?)
- Q2:如何选择合适的波特率?
- Q3:Modbus通信失败怎么办?
- Q4:如何处理浮点数数据?
- Q5:地址映射怎么计算?
- [13. 核心总结](#13. 核心总结)
-
- [13.1 三角逻辑](#13.1 三角逻辑)
- [13.2 调试排查顺序](#13.2 调试排查顺序)
- [13.3 关键记忆点](#13.3 关键记忆点)
- [13.4 工程师实战经验总结](#13.4 工程师实战经验总结)
-
- [13.4.1 为什么Modbus经久不衰?](#13.4.1 为什么Modbus经久不衰?)
- [13.4.2 学习路径建议](#13.4.2 学习路径建议)
- [13.4.3 常见"坑"整理](#13.4.3 常见"坑"整理)
- [13.4.4 主流设备Modbus接入要点](#13.4.4 主流设备Modbus接入要点)
- 14.附录
- 15.参考资料
1. Modbus协议概述
1.1 什么是Modbus协议
Modbus协议是一种串行通信协议 ,由Modicon公司(现为施耐德电气Schneider Electric)于1979年开发,最初用于可编程逻辑控制器(PLC)之间的通信。经过四十余年的发展,Modbus已经成为工业领域应用最广泛的通信协议之一,被誉为工业通信的"通用语言"。
Modbus RTU采用半双工主从应答机制,是PLC、变频器、传感器等设备互联的核心协议。
核心特点:
| 特性 | 说明 |
|---|---|
| 开放性强 | 协议完全公开,无版权限制,任何厂商都可以免费实现 |
| 简单易用 | 协议设计简洁,学习门槛低,便于快速开发部署 |
| 兼容性好 | 支持多种物理层接口,适应不同的硬件环境 |
| 稳定性高 | 在恶劣工业环境下长期运行稳定可靠 |
| 生态丰富 | 全球数以万计的设备支持Modbus协议 |
1.2 Modbus协议的发展历程
| 时间节点 | 里程碑事件 |
|---|---|
| 1979年 | Modicon公司发布Modbus协议,用于PLC间通信 |
| 1980年代 | Modbus RTU成为工业串行通信的事实标准 |
| 1990年代 | 以太网普及,Modbus TCP应运而生 |
| 2004年 | Modbus-IDA组织成立,推动协议标准化 |
| 至今 | 成为全球工业通信领域最流行的协议之一 |
2. Modbus协议类型详解
Modbus协议主要分为三种传输模式:Modbus-RTU 、Modbus-ASCII 和Modbus-TCP。三种模式各有特点,适用于不同的应用场景。
2.1 Modbus-RTU
Modbus-RTU是最常用的传输模式,采用二进制编码方式,传输效率最高。
2.1.1 RTU帧结构
┌─────────┬────────────┬──────────────┬─────────┬─────────┐
│ 地址域 │ 功能码域 │ 数据域 │ CRC低位 │ CRC高位 │
│ 1字节 │ 1字节 │ N字节 │ 1字节 │ 1字节 │
└─────────┴────────────┴──────────────┴─────────┴─────────┘帧结构详细说明:
| 字段 | 字节数 | 关键说明 | 实战注意事项 |
|---|---|---|---|
| 从站地址 | 1 | 0=广播(无响应),1-247=唯一设备地址 | 地址冲突会导致通讯瘫痪,需用调试工具扫描排查 |
| 功能码 | 1 | 指令核心,异常时最高位设1(0x03→0x83) | 错误功能码直接触发异常响应帧 |
| 数据字段 | N | 含地址、数值、长度等,随功能码动态变化 | 字节序需与设备手册一致(大端/小端) |
| CRC校验 | 2 | 前N+2字节的CRC-16校验,低字节优先 | 校验错误无响应,需用在线工具验证 |
2.1.2 RTU帧边界识别
RTU模式通过**静默时间(T3.5)**来识别帧边界:
帧与帧之间至少需要3.5个字符时间的静默间隔
↓
┌─────────┐ ←T3.5→ ┌─────────┐ ←T3.5→ ┌─────────┐
│ 帧1 │ ───────── │ 帧2 │ ───────── │ 帧3 │
└─────────┘ └─────────┘ └─────────┘字符时间计算公式:
Tchar = (数据位 + 起始位 + 停止位 + 校验位) / 波特率
T3.5 = 3.5 × Tchar示例(波特率9600,8N1格式):
- Tchar = 10 / 9600 ≈ 1.04ms
- T3.5 ≈ 3.65ms
2.1.3 主从通讯流程
┌──────────┐ ┌──────────┐
│ 主站 │ ──── 发送请求帧 ──────────> │ 从站 │
│ (Master) │ │ (Slave) │
│ │ <──── 返回响应帧 ────────── │ │
└──────────┘ └──────────┘
通讯规则:
1. 主站发送含目标地址的请求帧
2. 匹配地址的从站校验CRC,执行指令后返回响应帧
3. 地址不匹配或CRC错误时,从站无任何反馈2.2 Modbus-ASCII
Modbus-ASCII采用ASCII字符编码,便于人工调试和问题排查。
2.2.1 ASCII帧结构
┌──────┬─────────┬────────────┬──────────────┬───────┬───────┐
│ 起始 │ 地址域 │ 功能码域 │ 数据域 │ LRC │ 结束 │
│ ':' │ 2字符 │ 2字符 │ 2×N字符 │ 2字符 │ CR LF │
└──────┴─────────┴────────────┴──────────────┴───────┴───────┘帧结构说明:
| 字段 | 长度 | 说明 |
|---|---|---|
| 起始符 | 1字符 | 固定为冒号':'(0x3A) |
| 地址域 | 2字符 | 从站地址的ASCII十六进制表示 |
| 功能码域 | 2字符 | 功能码的ASCII十六进制表示 |
| 数据域 | 2×N字符 | 数据的ASCII十六进制表示 |
| LRC校验 | 2字符 | LRC校验值的ASCII表示 |
| 结束符 | 2字符 | 回车换行(CR LF,0x0D 0x0A) |
2.3 Modbus-TCP
Modbus-TCP是基于以太网的传输模式,支持远程访问和并发通信。
2.3.1 TCP帧结构
┌───────────────────── MBAP报文头 ────────────────────┬────────── PDU ───────────┐
│ │ │
┌────────────┬────────────┬────────────┬─────────────┬────────────┬────────────────┐
│ 事务标识符 │ 协议标识符 │ 长度字段 │ 单元标识符 │ 功能码域 │ 数据域 │
│ 2字节 │ 2字节 │ 2字节 │ 1字节 │ 1字节 │ N字节 │
└────────────┴────────────┴────────────┴─────────────┴────────────┴────────────────┘MBAP报文头说明:
| 字段 | 长度 | 说明 |
|---|---|---|
| 事务标识符 | 2字节 | 用于请求/响应匹配,客户端生成 |
| 协议标识符 | 2字节 | 固定为0x0000(Modbus协议) |
| 长度字段 | 2字节 | 后续字节数(单元标识符+PDU) |
| 单元标识符 | 1字节 | 从站地址或网关单元标识 |
2.4 Modbus Plus(ModbusPlus / MB+)
Modbus Plus是Modicon公司推出的一种高速令牌环网络协议,专为工业自动化环境设计。
主要特性:
| 特性 | 说明 |
|---|---|
| 传输速率 | 1Mbps |
| 拓扑结构 | 令牌环,节点间对等通信 |
| 最大节点数 | 64个 |
| 通信方式 | 点对点 + 广播 |
| 应用场景 | 高速工业控制网络(现已较少使用) |
⚠️ 注意:Modbus Plus为Modicon私有协议,与标准Modbus RTU/ASCII/TCP不兼容。目前工业界普遍使用RTU和TCP,Modbus Plus已逐渐被淘汰。
2.5 三种主流模式对比
| 对比项 | Modbus-RTU | Modbus-ASCII | Modbus-TCP |
|---|---|---|---|
| 编码方式 | 二进制 | ASCII字符 | 二进制 |
| 传输效率 | ★★★★★ | ★★ | ★★★★★★ |
| 有效数据率 | ~85% | ~40% | ~95% |
| 校验方式 | CRC-16 | LRC | TCP协议 |
| 物理介质 | RS-485/RS-232 | RS-485/RS-232 | 以太网 |
| 传输距离 | ≤1200m | ≤1200m | 无限制 |
| 最大节点 | 247个 | 247个 | 无限制 |
| 响应时间 | 40-100ms | 80-200ms | 5-20ms |
| 调试难度 | 中等 | 简单 | 中等 |
| 应用场景 | 现场控制 | 设备调试 | 远程监控 |
3. Modbus数据模型
3.1 四种数据类型
Modbus定义了四种基本数据类型,对应不同的存储区域:
很多初学者对"0区、1区、3区、4区"的编号感到困惑------为什么没有2区?这是Modbus协议历史遗留的编号规则:
存储区编号的命名逻辑
| 区号 | 存储区名称 | 逻辑地址前缀 | 命名原因 |
|---|---|---|---|
| 0区 | 输出线圈(可读写) | 0xxxx | 原始规范中输出线圈排第0位 |
| 1区 | 输入线圈(只读离散输入) | 1xxxx | 数字输入排第1位 |
| 3区 | 输入寄存器(只读) | 3xxxx | 模拟输入排第3位(2区在扩展规范中预留) |
| 4区 | 保持寄存器(可读写) | 4xxxx | 可配置寄存器排第4位 |
💡 记忆技巧:
- 线圈 = 布尔量(开/关),类比PLC的I/Q/M区
- 寄存器 = 数值量(整数/浮点),类比PLC的V/T/C/DB区
- 带"输入"的 = 只读 ;不带"输入"的 = 可读写
3.1.1 线圈(Coils)- 0区
定义:可读写的单比特数据,用于表示开关量输出。
| 属性 | 说明 |
|---|---|
| 地址前缀 | 0xxxx |
| 地址范围 | 00001-09999 |
| 数据位数 | 1位(布尔值) |
| 读写权限 | 读/写 |
| 典型应用 | 继电器控制、阀门开关、指示灯、变频器控制 |
3.1.2 离散输入(Discrete Inputs)- 1区
定义:只读的单比特数据,用于表示开关量输入。
| 属性 | 说明 |
|---|---|
| 地址前缀 | 1xxxx |
| 地址范围 | 10001-19999 |
| 数据位数 | 1位(布尔值) |
| 读写权限 | 只读 |
| 典型应用 | 按钮状态、行程开关、限位开关、传感器信号 |
3.1.3 输入寄存器(Input Registers)- 3区
定义:只读的16位数据,用于存储模拟量输入值。
| 属性 | 说明 |
|---|---|
| 地址前缀 | 3xxxx |
| 地址范围 | 30001-39999 |
| 数据位数 | 16位(1个字) |
| 读写权限 | 只读 |
| 典型应用 | 温度、压力、流量传感器数据、变频器实际转速 |
3.1.4 保持寄存器(Holding Registers)- 4区
定义:可读写的16位数据,用于存储参数设置和运行数据。
| 属性 | 说明 |
|---|---|
| 地址前缀 | 4xxxx |
| 地址范围 | 40001-49999 |
| 数据位数 | 16位(1个字) |
| 读写权限 | 读/写 |
| 典型应用 | 设定值、PID参数、报警阈值、变频器参数 |
3.2 数据类型汇总表
| 数据类型 | 地址前缀 | 地址范围 | 位数 | 读写 | 功能码(读) | 功能码(写) |
|---|---|---|---|---|---|---|
| 线圈 | 0xxxx | 00001-09999 | 1位 | 读/写 | 01 | 05/15 |
| 离散输入 | 1xxxx | 10001-19999 | 1位 | 只读 | 02 | - |
| 输入寄存器 | 3xxxx | 30001-39999 | 16位 | 只读 | 04 | - |
| 保持寄存器 | 4xxxx | 40001-49999 | 16位 | 读/写 | 03 | 06/16 |
3.3 地址系统详解
3.3.1 两种地址表示方式
1. 逻辑地址(参考地址)
这是设备手册中常用的表示方式:
40001 → 第1个保持寄存器
40002 → 第2个保持寄存器
30001 → 第1个输入寄存器
00001 → 第1个线圈2. 协议地址(偏移地址)
这是实际通信中使用的地址,从0开始:
逻辑地址40001 → 协议地址0x0000
逻辑地址40002 → 协议地址0x0001
逻辑地址30001 → 协议地址0x00003.3.2 地址转换规则
地址映射速算:
协议地址 = 逻辑地址 - 地址区起始值
示例:
逻辑地址40010 → 协议地址 = 40010 - 40001 = 9 (0x0009)
逻辑地址30005 → 协议地址 = 30005 - 30001 = 4 (0x0004)
线圈00265 → 协议地址 = 265 - 1 = 264 (0x0108)4. Modbus功能码详解
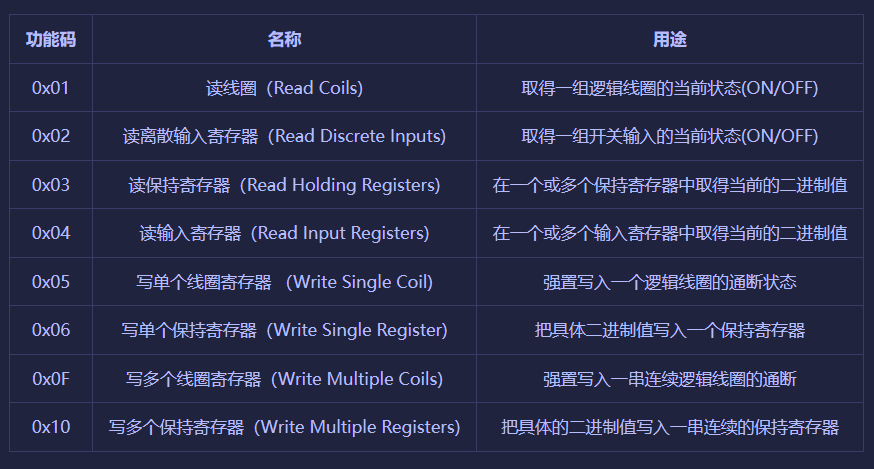
4.1 功能码概述
功能码是Modbus协议的核心,用于指定要执行的操作类型。
功能码范围分类:
| 范围 | 类型 |
|---|---|
| 0x00-0x4F | 公共功能码 |
| 0x50-0x7F | 保留码 |
| 0x80-0xFF | 异常响应码(功能码+0x80) |
4.2 基础读写类功能码(0x01-0x04/0x05/0x06/0x0F/0x10)
4.2.1 功能码01:读线圈(Read Coils)
功能:读取从站中连续线圈的状态(ON/OFF)。
操作对象:线圈寄存器(00001-09999,1位读写)
报文格式:
| 类型 | 字段 | 字节数 | 说明 |
|---|---|---|---|
| 请求 | 从站地址 | 1 | 目标设备地址 |
| 请求 | 功能码 | 1 | 0x01 |
| 请求 | 起始地址 | 2 | 线圈起始地址 |
| 请求 | 线圈数量 | 2 | 读取数量 |
| 请求 | CRC校验 | 2 | CRC-16 |
| 响应 | 从站地址 | 1 | 设备地址 |
| 响应 | 功能码 | 1 | 0x01 |
| 响应 | 返回字节数 | 1 | 数据字节数 |
| 响应 | 线圈状态数据 | N | 线圈状态 |
| 响应 | CRC校验 | 2 | CRC-16 |
变频器案例:读取V20变频器故障指示灯(线圈00001-00004)
请求帧:01 01 00 00 00 04 79 CB
│ │ └──┬──┘ └──┬──┘ └CRC
│ │ │ └─读取4个线圈
│ │ └─起始地址:00001
│ └─功能码:01
└─从站地址:01
响应帧:01 01 01 05 E1 8C
│ │ │ └─线圈数据:0x05(二进制0101)
│ │ └─数据字节数:1
│ └─功能码:01
└─从站地址:01
数据解析:
0x05 = 0000 0101(二进制)
线圈1 = ON(故障指示灯亮)
线圈2 = OFF
线圈3 = ON(运行指示灯亮)
线圈4 = OFF4.2.2 功能码02:读离散输入(Read Discrete Inputs)
功能:读取从站中连续离散输入的状态。
操作对象:离散输入寄存器(10001-19999,1位只读)
v倾角传感器案例:读取4个限位输入(10001-10004)
请求帧:03 02 00 00 00 04 79 C9
└─从站03,读4个离散输入
响应帧:03 02 01 0F E1 8C
└─数据:0x0F = 0000 1111(4个输入全有效,倾角超限)4.2.3 功能码03:读保持寄存器(Read Holding Registers)
功能:读取从站中连续保持寄存器的值。这是最常用的功能码之一。
操作对象:保持寄存器(40001-49999,16位读写)
电力仪表案例:读取MMP-5000D有功电度(40001-40002)
请求帧:01 03 00 00 00 02 C4 0B
│ │ └──┬──┘ └──┬──┘ └CRC
│ │ │ └─读取2个寄存器
│ │ └─起始地址:0(对应40001)
│ └─功能码:03
└─从站地址:01
响应帧:01 03 04 00 0F 42 40 7A 1F
│ │ │ └──────┬──────┘ └CRC
│ │ │ └─32位浮点数:0x000F4240
│ │ └─数据字节数:4(2个寄存器×2字节)
│ └─功能码:03
└─从站地址:01
数据解析:
0x000F4240(大端序)= 1000000
IEEE754浮点数转换 = 1000.0 kWh(电度值)4.2.4 功能码04:读输入寄存器(Read Input Registers)
功能:读取从站中连续输入寄存器的值(只读)。
操作对象:输入寄存器(30001-39999,16位只读)
变频器案例:读取V20实际转速(30001)
请求帧:02 04 00 00 00 01 90 0A
└─从站02,读输入寄存器30001
响应帧:02 04 02 13 88 AD F3
└─数据:0x1388 = 5000 → 50.0Hz(实际频率)4.2.5 功能码05:写单个线圈(Write Single Coil)
功能:向从站写入单个线圈的值(ON/OFF)。
PLC案例:控制S7-1200继电器输出(线圈00001)
写入ON:
请求帧:01 05 00 00 FF 00 CD 6B
│ │ └──┬──┘ └──┬──┘ └CRC
│ │ │ └─输出值:0xFF00(ON)
│ │ └─输出地址:00001
│ └─功能码:05
└─从站地址:01
响应帧:01 05 00 00 FF 00 CD 6B(与请求相同)
写入OFF:
请求帧:01 05 00 00 00 00 CD CA
└─输出值:0x0000(OFF)4.2.6 功能码06:写单个保持寄存器(Write Single Register)
功能:向从站写入单个保持寄存器的值。
变频器案例:设置V20基准频率(保持寄存器40100)
请求帧:02 06 00 63 13 88 2D F4
│ │ └──┬──┘ └──┬──┘ └CRC
│ │ │ └─写入值:0x1388 = 5000(50Hz)
│ │ └─寄存器地址:99(对应40100)
│ └─功能码:06
└─从站地址:02
响应帧:02 06 00 63 13 88 2D F4(与请求相同)4.2.7 功能码15(0x0F):写多个线圈(Write Multiple Coils)
功能:向从站写入多个线圈的值。
楼宇自控案例:控制8个照明回路(线圈00001-00008)
请求帧:01 0F 00 00 00 08 01 55 73 0A
│ │ └──┬──┘ └──┬──┘ │ └─┬─┘ └CRC
│ │ │ └─8个 │ └─数据:0x55(0101 0101)
│ │ └─起始地址 └1字节
│ └─功能码:0F(15)
└─从站地址:01
数据解析:0x55 = 0101 0101
线圈1/3/5/7 = ON(间隔开灯)
线圈2/4/6/8 = OFF
响应帧:01 0F 00 00 00 08 41 0A4.2.8 功能码16(0x10):写多个保持寄存器(Write Multiple Registers)
功能:向从站写入多个保持寄存器的值。
Beckhoff案例:配置倾角传感器采样参数(40001-40002)
请求帧:03 10 00 00 00 02 04 00 0A 00 05 B9 03
│ │ └──┬──┘ └──┬──┘ │ └──────┬──────┘ └CRC
│ │ │ └─2个 │ └─数据:10Hz, 5次平均
│ │ └─起始地址 └4字节数据
│ └─功能码:10(16)
└─从站地址:03
响应帧:03 10 00 00 00 02 11 0A4.3 进阶控制类功能码(0x15-0x16)
4.3.1 功能码21(0x15):强制多点线圈
功能:强制线圈置位/复位,区别于普通写入,具有更高优先级。
机床案例:紧急停止3个伺服轴(线圈00001-00003)
请求帧:01 15 00 00 00 03 01 07 29 0A
│ │ └──┬──┘ └──┬──┘ │ └─数据:0x07(111,全部ON)
│ │ │ └─3个 │
│ │ └─起始地址 └1字节
│ └─功能码:15(21)
└─从站地址:01
响应帧:01 15 00 00 00 03 69 0A4.3.2 功能码22(0x16):预置单个寄存器
功能:优先级高于0x06,用于紧急参数修改。
光伏案例:调整逆变器功率限制(保持寄存器40200)
请求帧:05 16 00 C8 07 D0 8F 0B
│ │ └──┬──┘ └──┬──┘ └CRC
│ │ │ └─写入值:0x07D0 = 2000W
│ │ └─寄存器地址:200(对应40200)
│ └─功能码:16(22)
└─从站地址:05
响应帧:与请求帧一致4.4 诊断维护类功能码(0x07-0x08/0x14)
4.4.1 功能码07:读异常状态
功能:快速获取设备故障状态。
请求帧:02 07 00 00
响应帧:02 07 05 B3 21
└─异常码:0x05(bit2=1代表通讯超时)4.4.2 功能码08:诊断
功能:设备自检与复位。
常用子功能码:
| 子功能码 | 说明 |
|---|---|
| 0x0001 | 硬件复位 |
| 0x0002 | 清除故障记录 |
| 0x0003 | 读取通信事件计数器 |
PLC案例:S7-1200通讯复位
请求帧:01 08 00 01 00 00 00 00 79 0B
└─子功能码:0x0001(硬件复位)
响应帧:01 08 00 01 00 00 00 00 F9 0B4.4.3 功能码20(0x14):读从站ID
功能:查询设备型号和厂商信息。
请求帧:04 14 00 00
响应帧:04 14 0A 56 32 30 2D 50 52 4F 20 20 20 A3 F2
└─设备型号:"V20-PRO"(ASCII码)4.5 功能码速查表
| 功能码 | 名称 | 操作对象 | 适用场景 |
|---|---|---|---|
| 0x01 | 读线圈 | 线圈寄存器 | 开关状态查询 |
| 0x02 | 读离散输入 | 离散输入寄存器 | 传感器信号检测 |
| 0x03 | 读保持寄存器 | 保持寄存器 | 参数读取 |
| 0x04 | 读输入寄存器 | 输入寄存器 | 模拟量采集 |
| 0x05 | 写单个线圈 | 线圈寄存器 | 单点控制 |
| 0x06 | 写单个保持寄存器 | 保持寄存器 | 参数整定 |
| 0x0F (15) | 写多个线圈 | 线圈寄存器 | 批量开关控制 |
| 0x10 (16) | 写多个保持寄存器 | 保持寄存器 | 批量参数配置 |
| 0x15 (21) | 强制多点线圈 | 线圈寄存器 | 紧急控制 |
| 0x16 (22) | 预置单个寄存器 | 保持寄存器 | 优先级参数修改 |
| 0x07 | 读异常状态 | - | 故障快速定位 |
| 0x08 | 诊断 | - | 设备自检与复位 |
| 0x14 (20) | 读从站ID | 设备信息区 | 设备型号查询 |
4.6 异常响应
当从站无法正常执行请求时,会返回异常响应。
异常响应帧格式:
┌────────┬──────────────┬──────────┬─────────┐
│ 从站地址 │ 功能码+0x80 │ 异常码 │ CRC校验 │
│ 1字节 │ 1字节 │ 1字节 │ 2字节 │
└────────┴──────────────┴──────────┴─────────┘异常码详细说明:
| 异常码 | 名称 | 说明 | 排查方案 | 报文案例 |
|---|---|---|---|---|
| 01 | 非法功能码 | 设备不支持该功能码 | 核对设备手册支持的功能码列表 | 01 83 01 D3 F8 |
| 02 | 非法数据地址 | 请求的地址不存在 | 确认寄存器地址范围(如40001-49999) | 01 83 02 C3 51 |
| 03 | 非法数据值 | 请求数据超出范围 | 检查数值是否超出设备量程 | 01 85 03 92 0A |
| 04 | 从站设备故障 | 从站执行时发生错误 | 重启设备或恢复出厂设置 | 01 86 04 33 B7 |
| 05 | 确认/忙 | 请求已接受正在处理 | 降低通讯频率或排查设备负载 | 02 86 05 23 C7 |
| 06 | 拒绝执行 | 设备拒绝执行请求 | 检查设备权限或锁定状态 | 03 8A 06 13 D7 |
异常响应示例:
请求读不存在的地址:
请求帧:01 03 FF FF 00 01
响应帧:01 83 02 C3 F1
│ │ │ └CRC
│ │ └─异常码:02(非法数据地址)
│ └─功能码:83(03+0x80)
└─从站地址:015.Modbus校验算法详解
5.1 CRC-16校验算法(RTU模式)
5.1.1 CRC校验原理
CRC(循环冗余校验)是一种基于多项式的校验算法。Modbus RTU使用CRC-16,多项式为0xA001。
CRC-16计算步骤:
- 初始化CRC寄存器为0xFFFF
- 对每个字节进行计算:
- 将字节与CRC低字节异或
- 对结果进行8次位处理
- 最终CRC寄存器值即为校验结果
5.1.2 CRC计算算法(C语言实现)
c
uint16_t CRC16(uint8_t *data, uint16_t length) {
uint16_t crc = 0xFFFF;
uint16_t i, j;
for (i = 0; i < length; i++) {
crc ^= data[i];
for (j = 0; j < 8; j++) {
if (crc & 0x0001) {
crc = (crc >> 1) ^ 0xA001;
} else {
crc >>= 1;
}
}
}
return crc;
}5.1.3 CRC快速验证
使用在线CRC计算器:
- 输入:
01 03 00 00 00 02 - 输出:CRC校验值
C4 0B(低字节在前)
5.2 LRC校验算法(ASCII模式)
5.2.1 LRC校验原理
LRC(纵向冗余校验)是一种简单的校验方法,计算所有字节的和的补码。
LRC计算步骤:
- 将所有字节相加(忽略溢出)
- 取反加1(补码)
- 结果转换为两个ASCII字符
5.2.2 LRC计算算法(C语言实现)
c
uint8_t LRC(uint8_t *data, uint16_t length) {
uint8_t lrc = 0;
uint16_t i;
for (i = 0; i < length; i++) {
lrc += data[i];
}
return (uint8_t)(-(int8_t)lrc);
}5.3 校验算法对比
| 特性 | CRC-16 | LRC |
|---|---|---|
| 校验位数 | 16位 | 8位 |
| 检错能力 | 强(99.99%) | 较弱(99.6%) |
| 计算复杂度 | 中等 | 简单 |
| 适用模式 | RTU | ASCII |
| 算法 | 多项式0xA001 | 累加求补码 |
6. 数据解析方案
6.1 32位浮点数解析
Modbus寄存器为16位,32位浮点数需要两个连续寄存器存储。
6.1.1 IEEE754浮点数解析
案例:电力仪表电度值(40001-40002)
响应帧:01 03 04 00 0F 42 40 7A 1F
数据:00 0F 42 40
字节序重组(大端序):
原始:0x00 0x0F 0x42 0x40
重组:0x000F4240
IEEE754转换:
0x000F4240 = 1000.0(kWh)6.1.2 字节序问题
32位数据可能存在四种排列方式:
| 字节序 | 排列方式 | 示例(ABCD原序) |
|---|---|---|
| ABCD | 大端序 | 00 0F 42 40 |
| DCBA | 小端序 | 40 42 0F 00 |
| BADC | 大端字交换 | 0F 00 40 42 |
| CDAB | 小端字交换 | 42 40 00 0F |
处理方法:
- 查看设备手册确认字节序
- 使用调试工具验证数据
- 编程时正确重组字节
6.2 BCD码解析
规则:每4位对应1位十进制数
案例:电表读数
寄存器值:0x1234
解析:
高4位(0x12)→ 十位"12"
低4位(0x34)→ 个位"34"
结果:1234.0
注意事项:
- 每个半字节范围0-9,超过9为非法BCD码
- 常用于时间、日期、计数器等数据6.3 数据类型转换示例
python
# Python数据解析示例
import struct
# 32位浮点数解析(大端序)
def parse_float32_be(data):
"""大端序浮点数解析"""
return struct.unpack('>f', data)[0]
# 32位浮点数解析(小端序)
def parse_float32_le(data):
"""小端序浮点数解析"""
return struct.unpack('<f', data)[0]
# BCD码解析
def parse_bcd(value):
"""BCD码转十进制"""
high = (value >> 4) & 0x0F
low = value & 0x0F
return high * 10 + low
# 示例
data = bytes([0x00, 0x0F, 0x42, 0x40])
print(parse_float32_be(data)) # 输出:1000.0
bcd_value = 0x12
print(parse_bcd(bcd_value)) # 输出:127. 物理接口详解与接线规范
7.1 RS-232与RS-485接口对比
Modbus协议本身是应用层协议,不依赖任何特定物理层,可在RS-232、RS-485、RS-422、以太网、光纤、蓝牙等多种介质上运行。工业现场最常用的是RS-485,以下是两种主要接口的详细对比:
7.1.1 RS-232接口
RS-232是早期最常见的串行通信标准,适合短距离点对点通信。
电平标准:
| 逻辑状态 | 电压范围 | 说明 |
|---|---|---|
| 逻辑0(Space) | +3V ~ +15V | 数据线为正电压 |
| 逻辑1(Mark) | -3V ~ -15V | 数据线为负电压 |
| 过渡区 | -3V ~ +3V | 不确定区域,避免工作在此区 |
主要特性:
| 特性 | 参数 |
|---|---|
| 通信方式 | 全双工(TX、RX独立) |
| 最大传输距离 | 约15米(低速)/ 标准规定 |
| 最大波特率 | 理论115200bps |
| 拓扑结构 | 点对点,一对一 |
| 抗干扰性 | 弱(单端信号) |
| 常见接口 | DB9、DB25 |
7.1.2 RS-485接口
RS-485采用差分信号传输,抗干扰性强,是工业现场首选接口。
电平标准:
| 逻辑状态 | A-B压差 | 说明 |
|---|---|---|
| 逻辑1 | +2V ~ +6V | A线高于B线 |
| 逻辑0 | -2V ~ -6V | A线低于B线 |
💡 差分信号原理:通过比较两根线的电压差来判断逻辑,共模噪声同时影响两根线,相减后被抵消,因此抗干扰极强。
主要特性:
| 特性 | 参数 |
|---|---|
| 通信方式 | 半双工(同一时刻只能发或收) |
| 最大传输距离 | 1200米(低波特率) |
| 最大波特率 | 10Mbps(短距离)/ 实际工程中常用≤115200bps |
| 最大节点数 | 标准32个驱动器,可扩展至247个(Modbus限制) |
| 抗干扰性 | 强(差分信号) |
| 常见接口 | 接线端子(A/B两线) |
7.1.3 RS-232 vs RS-485 对比总结
| 对比项 | RS-232 | RS-485 |
|---|---|---|
| 信号类型 | 单端信号 | 差分信号 |
| 通信方式 | 全双工 | 半双工 |
| 传输距离 | ≤15米 | ≤1200米 |
| 节点数 | 1对1 | 1对247 |
| 抗干扰性 | 弱 | 强 |
| 工业适用性 | 较差 | 优秀 |
| Modbus适用 | 近距离调试 | 现场控制首选 |
7.2 RS-485接线规范
7.2.1 接线方式
标准RS-485接线:
┌──────────┐ ┌──────────┐
│ 主站 │ ─── A ─────────── │ 从站 │
│ │ ─── B ─────────── │ │
└──────────┘ └──────────┘
BECKHOFF EL6021模块接线:
- 1/2脚短接 → 传感器A脚
- 5/6脚短接 → 传感器B脚
- 必须启用半双工模式,否则收发冲突7.2.2 终端电阻设置
| 通讯距离 | 终端电阻 | 说明 |
|---|---|---|
| ≤10米 | 可不加 | 短距离通信稳定 |
| >10米 | 必须 | 两端各加120Ω终端电阻 |
| >100米 | 推荐 | 使用屏蔽双绞线 |
7.3 通信参数设置
7.3.1 串口参数
| 参数 | 常用值 | 说明 |
|---|---|---|
| 波特率 | 9600/19200/38400/115200 | 通信速率 |
| 数据位 | 8 | 通常为8位 |
| 停止位 | 1或2 | 通常为1位 |
| 校验位 | 无/奇/偶 | 常用无校验 |
| 数据格式 | 8-N-1 | 8数据位,无校验,1停止位 |
7.3.2 通信超时设置
| 参数 | 推荐值 | 说明 |
|---|---|---|
| 帧间隔 | ≥3.5字符时间 | T3.5静默时间 |
| 响应超时 | 100-1000ms | 根据设备响应速度调整 |
| 重试次数 | 3次 | 通信失败时重试 |
7.4 批量操作限制
| 操作类型 | 最大数量 | 说明 |
|---|---|---|
| 读取保持寄存器 | 125个 | 单次请求最大数量 |
| 读取线圈 | 2000个 | 单次请求最大数量 |
| 写入保持寄存器 | 123个 | 字节数≤246 |
| 写入线圈 | 1968个 | 单次请求最大数量 |
8.Modbus实战案例
8.1 案例1:PLC控制变频器完整流程
场景:西门子S7-1200 PLC通过Modbus RTU控制V20变频器
硬件配置:
- S7-1200 PLC
- V20变频器
- RS485通信线(A-A,B-B连接)
变频器参数设置:
| 参数 | 值 | 说明 |
|---|---|---|
| P0700 | 5 | Modbus控制 |
| P1000 | 5 | Modbus频率给定 |
核心报文交互:
| 操作 | 请求帧 | 说明 |
|---|---|---|
| 启动变频器 | 02 06 00 63 00 01 6D F4 | 写入控制字40100=1 |
| 设定频率50Hz | 02 06 00 64 13 88 2D F4 | 写入频率40101=5000 |
| 读取实际频率 | 02 04 00 00 00 01 90 0A | 读取输入寄存器30001 |
| 响应帧 | 02 04 02 13 88 AD F3 | 实际频率=50.0Hz |
8.2 案例2:读取电力仪表数据
场景:读取MMP-5000D电力仪表的有功电度
设备参数:
- 从站地址:1
- 数据地址:保持寄存器40001-40002
- 数据格式:32位IEEE754浮点数
实现代码(Python):
python
from pymodbus.client import ModbusSerialClient
# 配置串口
client = ModbusSerialClient(
port='/dev/ttyUSB0',
baudrate=9600,
bytesize=8,
parity='N',
stopbits=1
)
client.connect()
# 读取两个寄存器
result = client.read_holding_registers(
address=0, # 起始地址40001
count=2, # 读取2个寄存器
slave=1 # 从站地址
)
if not result.isError():
# 解析32位浮点数
import struct
data = result.registers
# 大端序重组
byte_data = bytes([
data[0] >> 8, data[0] & 0xFF,
data[1] >> 8, data[1] & 0xFF
])
energy = struct.unpack('>f', byte_data)[0]
print(f"有功电度: {energy} kWh")
client.close()8.3 案例3:批量控制照明回路
场景:楼宇自控系统控制8个照明回路
实现代码(Python):
python
from pymodbus.client import ModbusSerialClient
client = ModbusSerialClient(
port='/dev/ttyUSB0',
baudrate=9600,
bytesize=8,
parity='N',
stopbits=1
)
client.connect()
# 控制模式:0101 0101(间隔开灯)
pattern = 0b01010101 # 0x55
# 写入多个线圈
result = client.write_coils(
address=0, # 起始地址00001
values=[bool(pattern & (1 << i)) for i in range(8)],
slave=1
)
if not result.isError():
print("控制成功:线圈1/3/5/7=ON,线圈2/4/6/8=OFF")
client.close()8.4 案例4:PLC程序实现(SCL语言)
场景:西门子S7-1200 PLC作为主站
scl
// 定义变量
VAR
MB_MASTER : MODBUS_COM; // Modbus主站功能块
REQ : BOOL; // 请求触发
DONE : BOOL; // 完成标志
ERROR : BOOL; // 错误标志
STATUS : WORD; // 状态码
REG_DATA : ARRAY[0..9] OF WORD; // 数据缓冲区
END_VAR
// 读取保持寄存器
MB_MASTER(
REQ := REQ, // 触发请求
UNIT := 1, // 从站地址
MODE := 0, // 模式:0=RTU
FUNC := 3, // 功能码:03
ADDR := 0, // 起始地址40001
NB := 10, // 读取10个寄存器
DATA := REG_DATA, // 数据缓冲区
DONE => DONE,
ERROR => ERROR,
STATUS => STATUS
);
// 数据处理
IF DONE AND NOT ERROR THEN
// 读取成功
温度值 := REG_DATA[0] / 10.0; // 转换为实际温度
压力值 := REG_DATA[1] / 100.0; // 转换为实际压力
频率值 := REG_DATA[2] / 100.0; // 转换为实际频率
END_IF;9. 调试技巧与工具推荐
9.1 调试排查顺序
调试流程:
┌─────────────────────────────────────────────────┐
│ 1. 硬件层(接线/地址) │
│ ↓ │
│ 2. 协议层(功能码/报文) │
│ ↓ │
│ 3. 数据层(解析/量程) │
└─────────────────────────────────────────────────┘9.2 常见问题排查
9.2.1 通信超时
现象:主站发送请求后,等待响应超时。
排查步骤 :
1. 检查物理连接(RS-485接线A-A、B-B)
2. 检查波特率、数据位、停止位等参数
3. 检查从站地址是否正确
4. 使用示波器检查信号波形
9.2.2 校验错误
现象:接收到响应但CRC校验失败。
可能原因 :
1. 波特率不匹配
2. 线路干扰严重
3. 校验算法实现错误
9.2.3 异常响应
* 现象:从站返回异常响应。
排查方法 :
异常码01:核对设备支持的功能码列表
异常码02:确认寄存器地址范围
异常码03:检查数值是否超出设备量程
9.3 调试工具推荐
9.3.1 PC端工具
| 工具名称 | 功能 | 特点 | 授权 |
|---|---|---|---|
| Modbus Poll | Modbus主站模拟器 | 图形化界面,支持RTU/TCP,数据可视化 | 付费(有试用) |
| Modbus Slave | Modbus从站模拟器 | 可设置寄存器数据,配合Poll调试 | 付费(有试用) |
| QModMaster | 开源主站工具 | 跨平台,完全免费,功能完整 | 开源免费 |
| ModScan | Modbus扫描工具 | 支持多功能码测试,自动扫描地址 | 商用 |
| Serial Port Monitor | 串口抓包分析 | 自动校验CRC,支持时序分析 | 付费 |
| VSPD (Virtual Serial Port Driver) | 虚拟串口工具 | 创建虚拟串口对,用于软件间联调 | 付费(有免费版) |
| Wireshark | 网络抓包分析 | 支持Modbus TCP协议解析,完全免费 | 开源免费 |
9.3.2 Wireshark抓包分析Modbus TCP
Wireshark是分析Modbus TCP问题的利器,使用步骤:
1. 过滤Modbus TCP流量:
# 在Wireshark过滤栏输入:
modbus
# 或指定端口502:
tcp.port == 5022. 报文解析示例:
Wireshark会自动解析Modbus报文,显示:
Frame 1: 12 bytes
Modbus/TCP
Transaction Identifier: 1
Protocol Identifier: 0
Length: 6
Unit Identifier: 1
Modbus
Function Code: Read Holding Registers (3)
Reference Number: 0
Word Count: 23. 常见问题排查场景:
- 检查主站是否正确发出请求
- 验证从站是否有响应
- 分析响应时间(延迟问题)
- 检测报文格式是否符合规范
9.3.3 在线工具
| 工具名称 | 链接 | 功能 |
|---|---|---|
| Modbus在线工具 | https://modbuskit.com/zh/modbus-rtu | 在线报文解析、CRC计算 |
| CRC计算器 | 在线搜索 | 校验码计算 |
9.3.4 手机端工具
- Modbus调试助手(安卓)
- 支持多设备实时监测
- 便携式现场调试
10.Modbus协议进阶
10.1 Modbus网关
Modbus网关用于实现不同协议之间的转换:
┌─────────────┐ ┌─────────────┐ ┌─────────────┐
│ Modbus RTU │ ──────> │ Modbus网关 │ ──────> │ Modbus TCP │
│ 从站设备 │ │ (协议转换) │ │ 主站系统 │
└─────────────┘ └─────────────┘ └─────────────┘
RS-485 双接口 以太网网关功能:
- 协议转换:RTU ↔ TCP
- 地址映射:虚拟地址映射
- 数据缓存:提高响应速度
- 并发处理:多客户端支持
10.2 Modbus安全
10.2.1 安全风险分析
Modbus协议设计于1979年,当时工业网络是物理隔离的封闭系统,因此原始协议不包含任何安全机制。随着工业设备接入互联网,这成为了重大安全隐患:
| 风险类型 | 说明 | 危害等级 |
|---|---|---|
| 无认证机制 | 任何人只要能连上网络就能读写数据 | 🔴 高危 |
| 无加密传输 | 数据明文传输,可被嗅探 | 🔴 高危 |
| 无访问控制 | 无法区分合法/非法主站 | 🟠 中危 |
| 地址可枚举 | 设备地址(1-247)可被暴力扫描 | 🟠 中危 |
| 无时间戳 | 无法检测重放攻击 | 🟡 低危 |
10.2.2 安全防护措施
物理层安全:
- RS-485总线物理隔离,限制物理接入
- 禁止将Modbus RTU设备直接暴露到互联网
网络层安全(针对Modbus TCP):
安全架构示例:
┌────────────┐ 防火墙 ┌────────────┐ VLAN隔离 ┌────────────┐
│ 外部网络 │ ──────────> │ DMZ区域 │ ─────────────> │ 工业控制网 │
│ (Internet) │ │ (安全网关) │ │ Modbus设备│
└────────────┘ └────────────┘ └────────────┘- 防火墙规则:仅允许已知IP访问TCP端口502
- VLAN隔离:将工业控制网络与办公网络隔离
- VPN隧道:远程访问必须经过VPN加密通道
- Modbus安全网关:部署支持白名单过滤的专用网关
10.2.3 Modbus Secure(下一代安全方案)
Modbus Secure 是基于 IEC 62351 标准的安全扩展,在原有Modbus基础上增加了TLS加密层:
| 特性 | 标准Modbus TCP | Modbus Secure |
|---|---|---|
| 传输层 | 明文TCP | TLS 1.2+ |
| 认证 | 无 | 证书认证 |
| 加密 | 无 | AES-256 |
| 端口 | 502 | 802 |
| 标准 | Modbus Organization | IEC 62351-8 |
💡 实际应用建议 :Modbus Secure目前部署较少,对于新建系统且安全要求高的场景,可考虑直接采用 OPC UA 协议(内置安全机制更完善)。
10.3 协议演进:Modbus vs OPC UA
随着工业4.0的发展,OPC UA逐渐被推荐为Modbus的替代方案。了解二者的区别有助于做出合适的技术选型:
| 对比项 | Modbus RTU/TCP | OPC UA |
|---|---|---|
| 发布年份 | 1979 | 2006 |
| 架构 | 主从(Master/Slave) | 客户端/服务器 + 发布/订阅 |
| 数据模型 | 寄存器/线圈(扁平) | 面向对象,有节点/类型系统 |
| 安全性 | 无内建安全 | 内建认证+加密 |
| 互操作性 | 基本 | 强(包含语义信息) |
| 实现复杂度 | 简单 | 复杂 |
| 资源消耗 | 极低 | 较高 |
| 适用场景 | 传统设备、嵌入式 | 新建系统、跨厂商集成 |
技术选型建议:
| 场景 | 推荐协议 |
|---|---|
| 传统PLC、变频器、仪表通信 | Modbus RTU/TCP |
| 新建IoT系统(云端集成) | Modbus TCP + MQTT网关 |
| 高安全要求的关键系统 | OPC UA 或 Modbus Secure |
| 跨厂商设备互联互通 | OPC UA |
10.4 Modbus与物联网(IoT)集成
10.4.1 Modbus over MQTT架构
随着IoT的发展,Modbus over MQTT 成为将传统工业设备接入云平台的主流方案:
现场层 边缘层 云平台层
┌──────────┐ ┌─────────────────┐ ┌──────────────┐
│ PLC设备 │ │ │ │ │
│ 变频器 │─RS485─│ IoT边缘网关 │─MQTT─│ 云平台 │
│ 传感器 │ │ (Modbus→MQTT) │ │ (数据存储/ │
│ 仪表 │ │ 边缘计算/过滤 │ │ 可视化) │
└──────────┘ └─────────────────┘ └──────────────┘
Modbus RTU/TCP 协议转换 + 数据预处理 MQTT/HTTP/WebSocket数据流向:
- 边缘网关按配置周期(如1s)轮询Modbus从站
- 将采集到的数据转换为JSON/CBOR格式
- 通过MQTT Publish发布到云平台Topic
- 云平台订阅Topic,实现实时监控与数据存储
10.4.2 常见IoT网关方案
| 方案 | 说明 | 适用场景 |
|---|---|---|
| Node-RED | 可视化流编程,内置Modbus节点 | 快速原型、小规模部署 |
| Ignition | 工业级SCADA平台,原生支持 | 大型工厂MES/SCADA |
| 自研网关 | 基于Python/C++/Node.js开发 | 定制化需求 |
| 商用网关 | 研华、摩莎等厂商硬件网关 | 免维护、可靠性高 |
10.4.3 Node.js实现示例
javascript
// node-modbus-serial + MQTT 实现数据采集上报
const ModbusRTU = require("modbus-serial");
const mqtt = require("mqtt");
const modbusClient = new ModbusRTU();
const mqttClient = mqtt.connect("mqtt://broker.example.com");
// 连接Modbus RTU设备
modbusClient.connectRTUBuffered("/dev/ttyUSB0", { baudRate: 9600 });
modbusClient.setID(1); // 从站地址
// 定时采集数据
setInterval(async () => {
try {
// 读取保持寄存器 40001-40002(2个)
const data = await modbusClient.readHoldingRegisters(0, 2);
const payload = {
timestamp: Date.now(),
registers: data.data,
temperature: data.data[0] / 10.0, // 寄存器值/10=实际温度
pressure: data.data[1] / 100.0 // 寄存器值/100=实际压力
};
// 发布到MQTT
mqttClient.publish("factory/device01/data", JSON.stringify(payload));
console.log("数据上报成功:", payload);
} catch (err) {
console.error("采集失败:", err);
}
}, 1000); // 每秒采集一次10.4.4 Python pymodbus完整示例
python
from pymodbus.client import ModbusTcpClient
import json
import time
def read_device_data(client, slave_id=1):
"""读取设备数据并返回字典"""
result = {}
# 读取保持寄存器(温度、压力、流量)
hr = client.read_holding_registers(address=0, count=3, slave=slave_id)
if not hr.isError():
result['temperature'] = hr.registers[0] / 10.0 # 实际温度
result['pressure'] = hr.registers[1] / 100.0 # 实际压力
result['flow'] = hr.registers[2] / 10.0 # 实际流量
# 读取线圈状态(设备运行状态)
coils = client.read_coils(address=0, count=4, slave=slave_id)
if not coils.isError():
result['pump_running'] = coils.bits[0]
result['valve_open'] = coils.bits[1]
result['alarm'] = coils.bits[2]
result['fault'] = coils.bits[3]
return result
# 连接Modbus TCP设备
client = ModbusTcpClient(host='192.168.1.10', port=502)
client.connect()
try:
while True:
data = read_device_data(client, slave_id=1)
print(f"采集时间: {time.strftime('%H:%M:%S')}")
print(f"温度: {data.get('temperature', 'N/A')} °C")
print(f"压力: {data.get('pressure', 'N/A')} MPa")
print(f"泵状态: {'运行' if data.get('pump_running') else '停止'}")
print(f"报警: {'有报警' if data.get('alarm') else '正常'}")
print("-" * 40)
time.sleep(1)
finally:
client.close()11.学习资源汇总
11.1 官方规范文档
| 文档名称 | 说明 |
|---|---|
| Modbus协议规范 | 官方协议文档 |
| Modbus应用协议 V1.1b3 | 协议实现指南 |
| Modbus TCP规范 | TCP实现规范 |
11.2 优质教程链接
11.2.1 基础教程
| 教程名称 | 链接 | 说明 |
|---|---|---|
| Modbus通讯协议解析 | https://www.cnblogs.com/altairshmily/articles/19038177 | 详细的协议解析 |
| Modbus RTU基础教程 | https://modbuskit.com/zh/blog/modbus-rtu-basic-tutorial | 从零开始学习 |
| Modbus协议详解 | https://www.modbus.cn/modbus-guide | 官方教程 |
| Modbus RTU功能码终极指南 | https://mp.weixin.qq.com/s/g3xXqHsgF9WPPusHCgboPA | 实战案例丰富 |
11.2.2 进阶教程
| 教程名称 | 链接 | 说明 |
|---|---|---|
| RTU/TCP/ASCII对比 | https://modbuskit.com/zh/blog/modbus-rtu-tcp-ascii-comprehensive-comparison | 三种模式详解 |
| 功能码详解 | https://www.xlink.cn/docs/platform/protocol-description/Modbus/code/ | 功能码说明 |
| CRC校验算法 | https://blog.csdn.net/m0_47673526/article/details/134290383 | 校验原理 |
11.2.3 实战教程
| 教程名称 | 链接 | 说明 |
|---|---|---|
| PLC Modbus通信 | https://zhuanlan.zhihu.com/p/356388866 | 西门子PLC实例 |
| Python Modbus | https://blog.csdn.net/Dontla/article/details/134413891 | Python实现 |
11.3 在线工具
| 工具名称 | 链接 | 功能 |
|---|---|---|
| Modbus在线工具 | https://modbuskit.com/zh/modbus-rtu | 报文解析、CRC计算 |
| Modbus功能码查询 | https://www.xlink.cn/docs/platform/protocol-description/Modbus/code/ | 功能码说明 |
| Modbus地址对照表 | https://www.xlink.cn/docs/platform/protocol-description/Modbus/address/ | 地址说明 |
11.4 开发库推荐
11.4.1 Python库
| 库名称 | 说明 | 安装命令 |
|---|---|---|
| pymodbus | 功能最全 | pip install pymodbus |
| minimalmodbus | 简单易用 | pip install minimalmodbus |
| modbus-tk | 轻量级 | pip install modbus_tk |
11.4.2 C/C++库
| 库名称 | 说明 |
|---|---|
| libmodbus | 开源C库,跨平台 |
| QModbus | Qt框架实现 |
12.常见问题解答(FAQ)
Q1:Modbus RTU和TCP有什么区别?
A:主要区别在于传输方式和物理介质:
- RTU使用串行通信(RS-485),传输距离有限,单网络节点数有限
- TCP使用以太网,传输距离无限制,支持更多节点和并发连接
Q2:如何选择合适的波特率?
A:波特率选择需要考虑:
- 通信距离:距离越远,波特率应越低
- 环境干扰:干扰大时应降低波特率
- 数据量:数据量大时可提高波特率
- 推荐范围:9600-115200bps
Q3:Modbus通信失败怎么办?
A:按以下步骤排查:
- 检查物理连接(接线、终端电阻)
- 检查通信参数(波特率、数据位等)
- 检查从站地址
- 使用调试工具抓包分析
- 检查CRC校验
Q4:如何处理浮点数数据?
A:Modbus寄存器为16位整数,处理浮点数方法:
- 使用两个连续寄存器存储一个32位浮点数
- 注意字节序(大端/小端)
- 使用IEEE 754标准解析
Q5:地址映射怎么计算?
A:
- 逻辑地址40001 → 协议地址0(40001-40001=0)
- 逻辑地址40100 → 协议地址99(40100-40001=99)
- 线圈00265 → 协议地址264(265-1=264)
13. 核心总结
13.1 三角逻辑
Modbus RTU的核心是**「功能码-寄存器-报文」三角逻辑**:
┌─────────────┐
│ 功能码 │
│ (定义操作) │
└──────┬──────┘
│
┌───────┴───────┐
▼ ▼
┌─────────────┐ ┌─────────────┐
│ 寄存器 │ │ 报文 │
│ (存储数据) │ │ (实现传输) │
└─────────────┘ └─────────────┘13.2 调试排查顺序
   先硬件(接线/地址)→ 再协议(功能码/报文)→ 后数据(解析/量程)13.3 关键记忆点
| 要点 | 说明 |
|---|---|
| 功能码 | 定义操作类型,异常时+0x80 |
| 地址 | 逻辑地址-1=协议地址 |
| CRC | 低字节在前,可用在线工具计算 |
| 数据 | 注意字节序和数据类型 |
| 超时 | 建议100-1000ms |
13.4 工程师实战经验总结
以下是来自10年工业通信工程师积累的宝贵经验,帮助你少走弯路:
13.4.1 为什么Modbus经久不衰?
简单 > 完美
在工业现场,可靠性、低成本、易实现比功能丰富更重要。Modbus用40多年证明了这一点。
Modbus最大的价值在于三点:
- 免费:无专利授权费用,大量使用获得了广泛生态支持
- 简单:协议帧格式紧凑,初学者1天就能理解完整协议
- 兼容:无论多老的设备,几乎都支持Modbus------这正是它的护城河
13.4.2 学习路径建议
阶段1(理解):
掌握四种存储区 → 理解功能码含义 → 读懂RTU帧格式
阶段2(实践):
安装ModbusPoll/ModbusSlave → 搭建虚拟串口调试环境
→ 自己组帧发报文 → 验证响应
阶段3(项目):
接实际设备(PLC/变频器/仪表)→ 读设备手册找寄存器地址
→ 用Python/C#编写采集程序 → 处理异常和超时
阶段4(进阶):
学习Modbus TCP → 了解Modbus网关 → 研究IoT集成方案13.4.3 常见"坑"整理
| 坑点 | 说明 | 解决方案 |
|---|---|---|
| 地址偏移 | 设备手册写40001,实际发报文要用0 | 协议地址 = 逻辑地址 - 1(或-区起始值) |
| 字节序混乱 | 32位浮点数高低字节顺序不一致 | 查设备手册,不同厂商字节序可能不同 |
| CRC字节序 | CRC低字节先发,高字节后发 | 注意:CRC低位在前,与多数想象相反 |
| 地址冲突 | 总线上两个设备地址相同导致通信混乱 | 通电前用调试工具逐个检查设备地址 |
| 终端电阻遗漏 | 长距离不加120Ω终端电阻,信号反射 | 超过10米必须两端各加120Ω |
| 波特率不一致 | 主从波特率设置不同,无响应 | 统一用9600波特率,稳定后再提速 |
| 广播地址误用 | 发给地址0,所有从站执行但无人响应 | 广播写有效,但不要用广播读 |
| 响应超时太短 | 某些老设备响应慢,超时设太短导致误判 | 建议初调时超时设置1000ms |
13.4.4 主流设备Modbus接入要点
| 设备类型 | 典型品牌 | 关键要点 |
|---|---|---|
| PLC | 西门子、汇川、信捷、台达 | 国产PLC基本都支持Modbus,查手册找从站地址配置参数 |
| 变频器 | 西门子V20、ABB、汇川 | 需设置Modbus控制模式(P0700=5等),频率/控制字有固定寄存器 |
| 电力仪表 | 安科瑞、华立、科陆 | 数据多为32位浮点,需要两个寄存器,注意字节序 |
| 传感器 | 气体、温湿度、压力 | 通常输出保持寄存器,分辨率和量程需对照手册转换 |
| HMI | 威纶通、信捷 | HMI可作主站也可作从站,注意配置Modbus驱动 |
14.附录
附录A:功能码速查表
| 功能码 | 名称 | 操作对象 | 读写 |
|---|---|---|---|
| 01 | 读线圈 | 线圈 | 读 |
| 02 | 读离散输入 | 离散输入 | 读 |
| 03 | 读保持寄存器 | 保持寄存器 | 读 |
| 04 | 读输入寄存器 | 输入寄存器 | 读 |
| 05 | 写单个线圈 | 线圈 | 写 |
| 06 | 写单个寄存器 | 保持寄存器 | 写 |
| 0F (15) | 写多个线圈 | 线圈 | 写 |
| 10 (16) | 写多个寄存器 | 保持寄存器 | 写 |
| 15 (21) | 强制多点线圈 | 线圈 | 写 |
| 16 (22) | 预置单个寄存器 | 保持寄存器 | 写 |
附录B:异常码速查表
| 异常码 | 名称 | 说明 |
|---|---|---|
| 01 | ILLEGAL FUNCTION | 非法功能码 |
| 02 | ILLEGAL DATA ADDRESS | 非法地址 |
| 03 | ILLEGAL DATA VALUE | 非法数据值 |
| 04 | SLAVE DEVICE FAILURE | 从站故障 |
| 05 | ACKNOWLEDGE | 确认/忙 |
| 06 | SLAVE DEVICE BUSY | 拒绝执行 |
附录C:常用波特率参数
| 波特率 | T3.5时间 | 最大距离(RS-485) |
|---|---|---|
| 1200 | 29.17ms | 1200m |
| 2400 | 14.58ms | 1000m |
| 4800 | 7.29ms | 800m |
| 9600 | 3.65ms | 600m |
| 19200 | 1.82ms | 400m |
| 38400 | 0.91ms | 200m |
| 115200 | 0.30ms | 50m |
附录D:数据类型对照表
| 数据类型 | 地址前缀 | 位数 | 读写 | 功能码 |
|---|---|---|---|---|
| 线圈 | 0xxxx | 1位 | R/W | 01,05,15 |
| 离散输入 | 1xxxx | 1位 | R | 02 |
| 输入寄存器 | 3xxxx | 16位 | R | 04 |
| 保持寄存器 | 4xxxx | 16位 | R/W | 03,06,16 |
15.参考资料
- Modbus协议官方规范(Modbus Organization)
- 《Modbus通讯协议完全指南》
- Modbus通讯协议解析
- 在线Modbus工具
- Modbus RTU基础教程
- Modbus功能码详解
- Modbus地址模型
- 三种模式对比
- CRC校验算法
- PLC Modbus通信实例
- Modbus RTU功能码终极指南
- 10年工程师的MODBUS总结(新阁教育付工)
- 详解Modbus通信协议(ARM研习社)
- Modbus协议详解(王小工)
- IEC 62351 工业通信安全标准