一、结构区别
1.1 简介
电机的星形 (Y) 连接和三角形 (Δ) 连接,是电机内部三相定子绕组末端 (U2、V2、W2) 的两种不同连接方式,它们直接决定了每相绕组实际承受的电压和流过的电流,从而影响电机的整体性能。
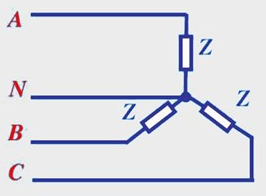
1.2 星形连接 (Y) 结构
将三相绕组的末端 (U2、V2、W2) 全部连接在一起,形成一个公共的中性点 (N) 。
而三相绕组的始端 (U1、V1、W1) 则分别连接到三相交流电源的 A、B、C 三条线上。从外面看,就像一个英文字母"Y"。
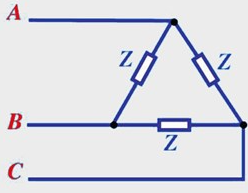
1.3 三角形连接 (Δ)结构
将三相绕组首尾相连,形成一个闭合的三角形回路。就是 U1 接 W2,V1 接 U2,W1 接 V2。
然后从这三个连接点 (U1-W2, V1-U2, W1-V2) 引出三条线,分别连接到三相交流电源的 A、B、C 三条线上。
二、性能区别
2.1 术语定义
|-----------------------------------------------------------|------------------------|
| 定义 | 解释 |
| (Phase Voltage) 相电压 | 电机内部每一相绕组两端承受的电压 |
| (Phase Current) 相电流 | 实际流过电机内部每一相绕组的电流 |
| (Line Voltage) 线电压 | 火线 (相线) 与火线 (相线) 之间的电压 |
| (Line Current) 线电流 | 火线 (相线) 与火线 (相线) 之间的电流 |
2.2 性能概述
|----------|--------------------------------------------------------|-------------------------------------------------------------|
| | 星形接法 (Y) | 三角形接法 (Δ) |
| 电压关系 | |
|
| 电流关系 | |
|
2.2.1 星形连接 (Y) 性能
- 电压: 星形连接时,电机的相电压的
倍等于线电压。
- 电流: 星形连接时,电机的相电流和线电流相等。
- 功率: 在星形连接中,电机的功率较低,适用于低功率或启动时的电流限制。
2.2.2 三角形连接 (Δ) 性能
- 电压: 三角形连接时,电机的电压和线电压相等。
- 电流: 在三角形连接时,电机的相电流的
- 功率: 三角形连接提供更高的功率,因此适用于大功率负载。
2.3 举例
我们以 PMSM 电机,仅接法不同举例:
|-----------|------------------|-----------------|---------------|
| 特性 | 星形接法 (Y) | 三角形接法 (Δ) | 倍数关系 |
| 绕组相电压 | 13.8V(24/√3) | 24V | Δ 是 Y 的 1.73倍 |
| 空载转速 | 较低 (假设 3000 RPM) | 较高 (约 5200 RPM) | Δ 是 Y 的 1.73倍 |
| 扭矩常数 | 较大 (更有力) | 较小 (较轻快) | Y 是 Δ 的 1.73倍 |
| 堵转电流 | 较小 | 较大 | Δ 是 Y 的 3倍 |
三、推导两种接法的电流和电流区别
3.1 推导 Y 形接法线电压和相电压的关系
我们推导一下 Y 形接法为什么线电压是相电压的 倍:
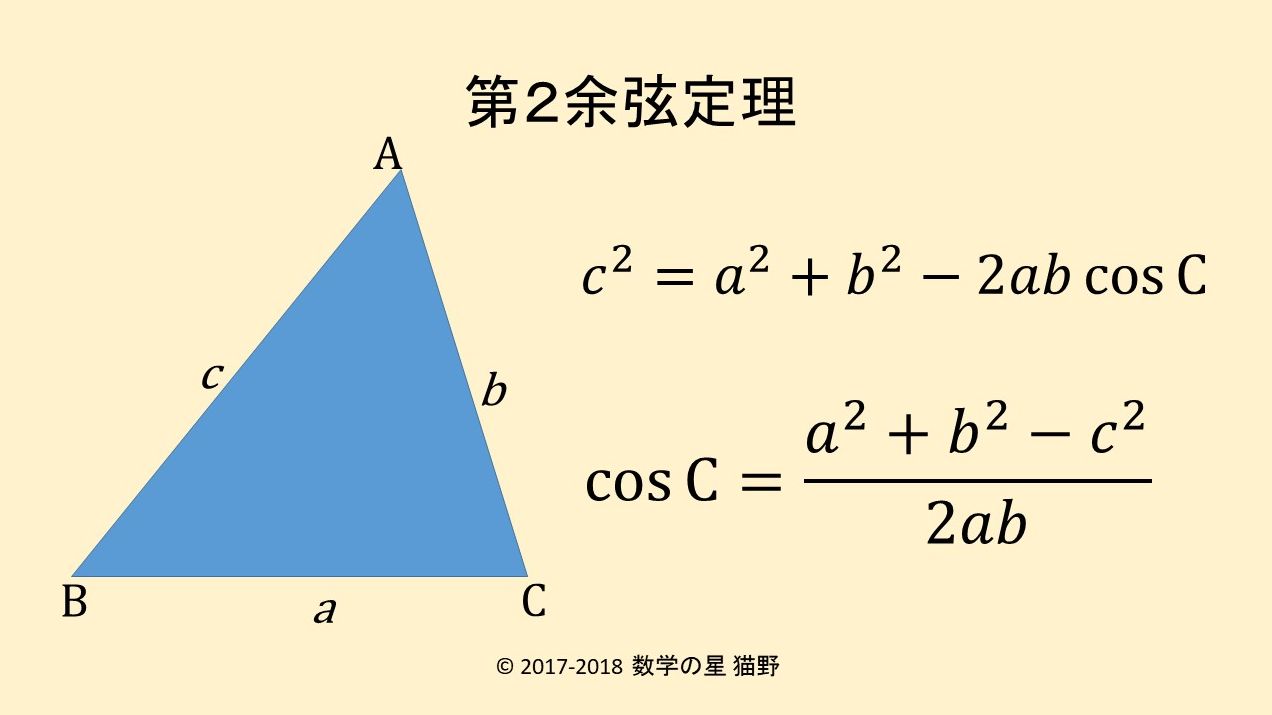
首先我们知道余弦定理:
我们可知:
- 三相电压
- 三个电压矢量
- 计算两个电压矢量之间的差值(比如
如我们之前的图所示:
根据余弦定理,我们要得出 的长度,这就是线电压:
我们假设:
再将:
带入后可得:
所以我们得出了线电压是相电压的 倍。
3.2 星形 (Y) 和三角形 (Δ) 电流区别
我们知道,三角形连接方式中,线电流除 √3 等于相电流。
如下图,我们给 A、B 通电,其会有一定的分支电流通过另外两个绕组,也就是线电流并没有完全施加到某一个相绕组上,所以产生了分流。
四、三角连接和星形角度差
4.1 简述
在电机驱动和电力系统中,三角形 (Δ) 连接和星形 (Y) 连接之间存在着非常关键的相位差,这个角度是 30°。
4.2 为什么会有 30° 的角度差?
在 FOC 算法中,零点角度 (Offset) 的作用是让算法计算出的定子磁场方向 (dq 坐标系) 与转子永磁体的实际物理方向重合。
如果你把电机从星形改接成三角形,或者在采集线电流时没有做变换 d 轴和 q 轴在算法层面会产生 30° 的旋转偏移。
这是因为绕组使用电流合成的磁场方向所导致的。