目录
[1. 残差定义](#1. 残差定义)
[2. 雅可比推导](#2. 雅可比推导)
[3. 右乘BCH近似雅可比的逆的实现](#3. 右乘BCH近似雅可比的逆的实现)
1. 残差定义
根据IMU预积分(VINS)中的推导,帧间imu积分项的残差定义如下:
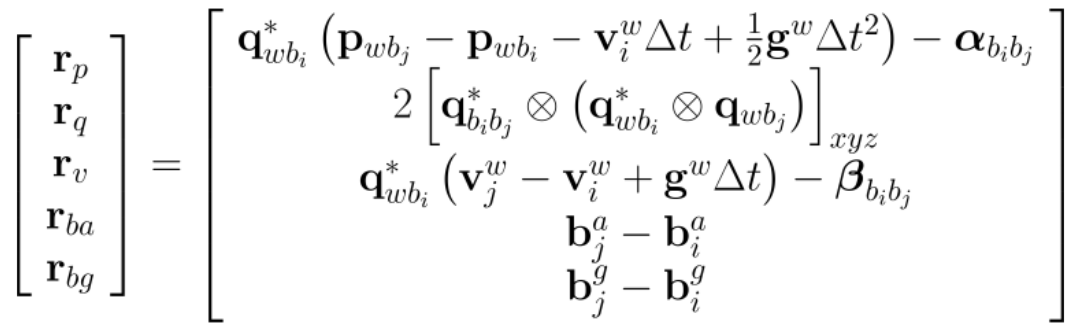
其中,旋转残差项的形式来源为:
中的q代表四元数。假设
为旋转误差对应的旋转向量,则:
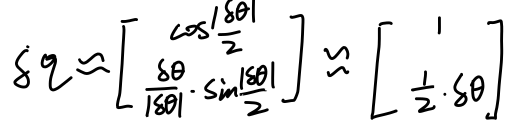
则等于
虚部的2倍:

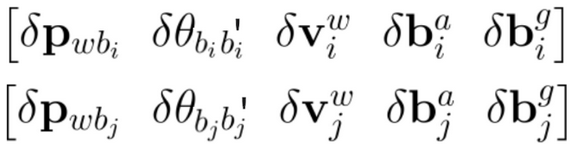
在IMU预积分(VINS)中以四元数 的形式对残差的雅可比进行了推导,本篇笔记该用以旋转矩阵R (李群)的形式推导该残差对下述扰动量的雅可比:
推导过程会用到李群的BCH公式与伴随性质:
(1)BCH公式:

其中,分别代表两个旋转向量(李代数),
代表对李代数进行指数映射得到李群(旋转矩阵),
分别代表左乘BCH近似雅可比的逆和右乘BCH近似雅可比的逆。
(2)伴随:

其中,代表旋转矩阵。
2. 雅可比推导
**求导过程采用右乘扰动模型,因为误差(扰动)定义在载体b系。**雅可比的推导过程如下:
1. 对 i 时刻无关量求导

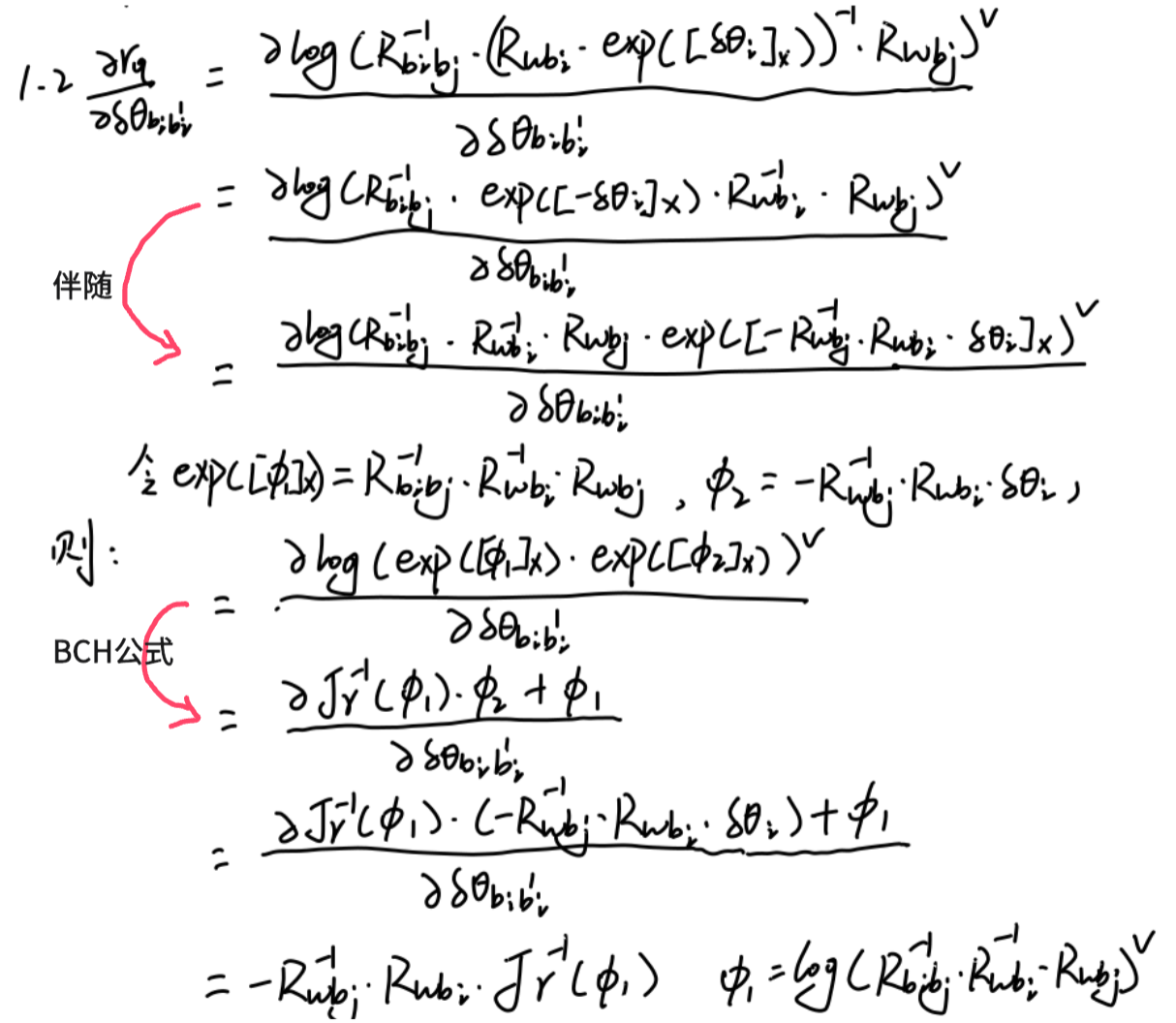
2. 对 i 时刻旋转误差向量求导
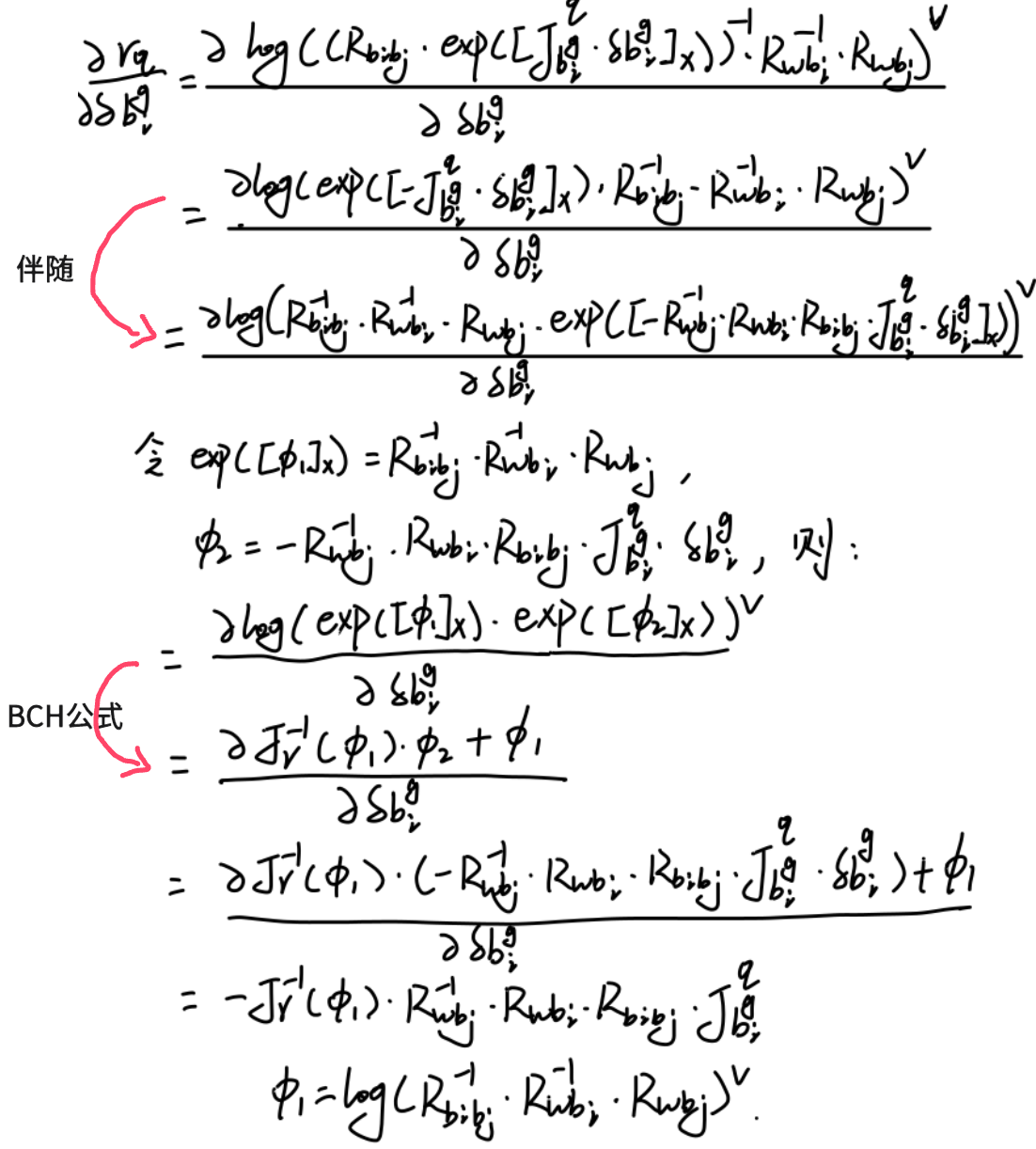
3. 对 i 时刻陀螺仪bias误差求导
4. 对 j 时刻无关量求导

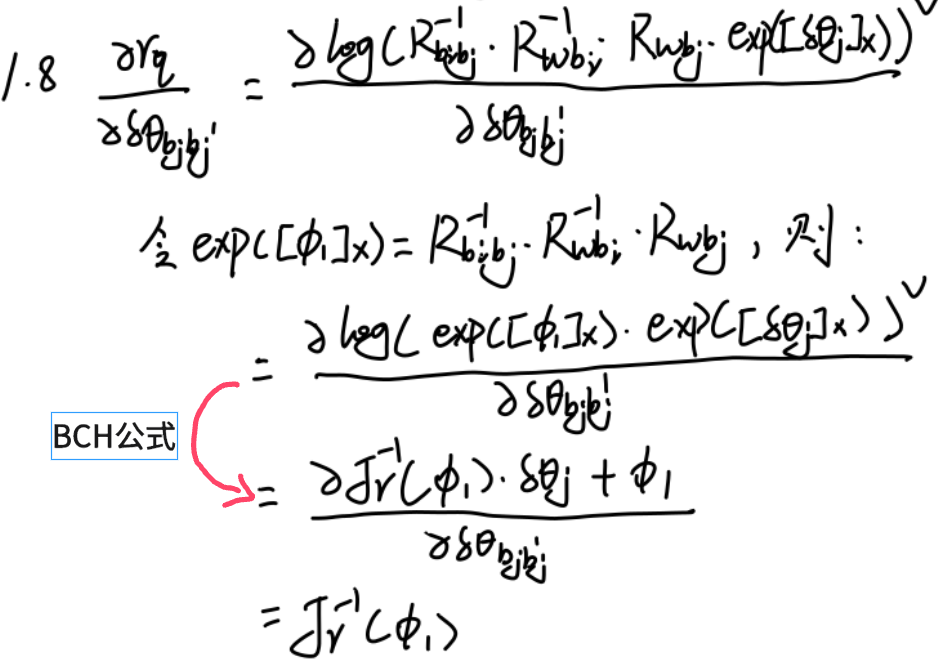
5. 对 j 时刻旋转误差向量求导
3. 右乘BCH近似雅可比的逆的实现
右雅可比:

其中,代表一个旋转向量,
代表将旋转向量转为反对称矩阵,
代表旋转角的大小(旋转向量的模长)。
右雅可比的逆:

代码实现:
cpp
#include <Eigen/Core>
#include <Eigen/Geometry>
/**
* @brief 计算 SO(3) 右雅可比的逆 J_r^{-1}(phi)
* @param phi 旋转向量 (李代数 so3)
* @return 3x3 的右雅可比逆矩阵
*/
Eigen::Matrix3d RightJacobianInv(const Eigen::Vector3d& phi) {
const double theta = phi.norm();
Eigen::Matrix3d I = Eigen::Matrix3d::Identity();
// 1. 计算反对称矩阵 phi^
Eigen::Matrix3d phi_hat;
phi_hat << 0, -phi(2), phi(1),
phi(2), 0, -phi(0),
-phi(1), phi(0), 0;
// 2. 根据角度大小选择计算方式
if (theta < 1e-6) {
// 小角度近似:J_r^{-1} ≈ I + 0.5 * phi^
return I + 0.5 * phi_hat;
} else {
// 正常角度:使用闭式公式
double theta2 = theta * theta;
double sin_theta = sin(theta);
double cos_theta = cos(theta);
// 计算系数: [1/theta^2 - (1+cos(theta))/(2*theta*sin(theta))]
double coeff = (1.0 / theta2) - (1.0 + cos_theta) / (2.0 * theta * sin_theta);
// 组合公式: I + 0.5*phi^ + coeff * (phi^)^2
return I + 0.5 * phi_hat + coeff * phi_hat * phi_hat;
}
}代码中对数值稳定性进行了处理。当旋转角很小,趋近于0时,直接使用上面的闭式公式会导致分母为 0 或数值不稳定。此时需要使用泰勒展开近似:
