INT8 量化会"毁掉"你的工业检测模型吗?
一份来自产线的真实精度影响分析!
"FP32 模型 mAP 95%,一转 INT8 掉到 87%?"
"缺陷检出率暴跌,客户差点拒收!"
"都说能提速 2~3 倍,但精度崩了还有什么用?"
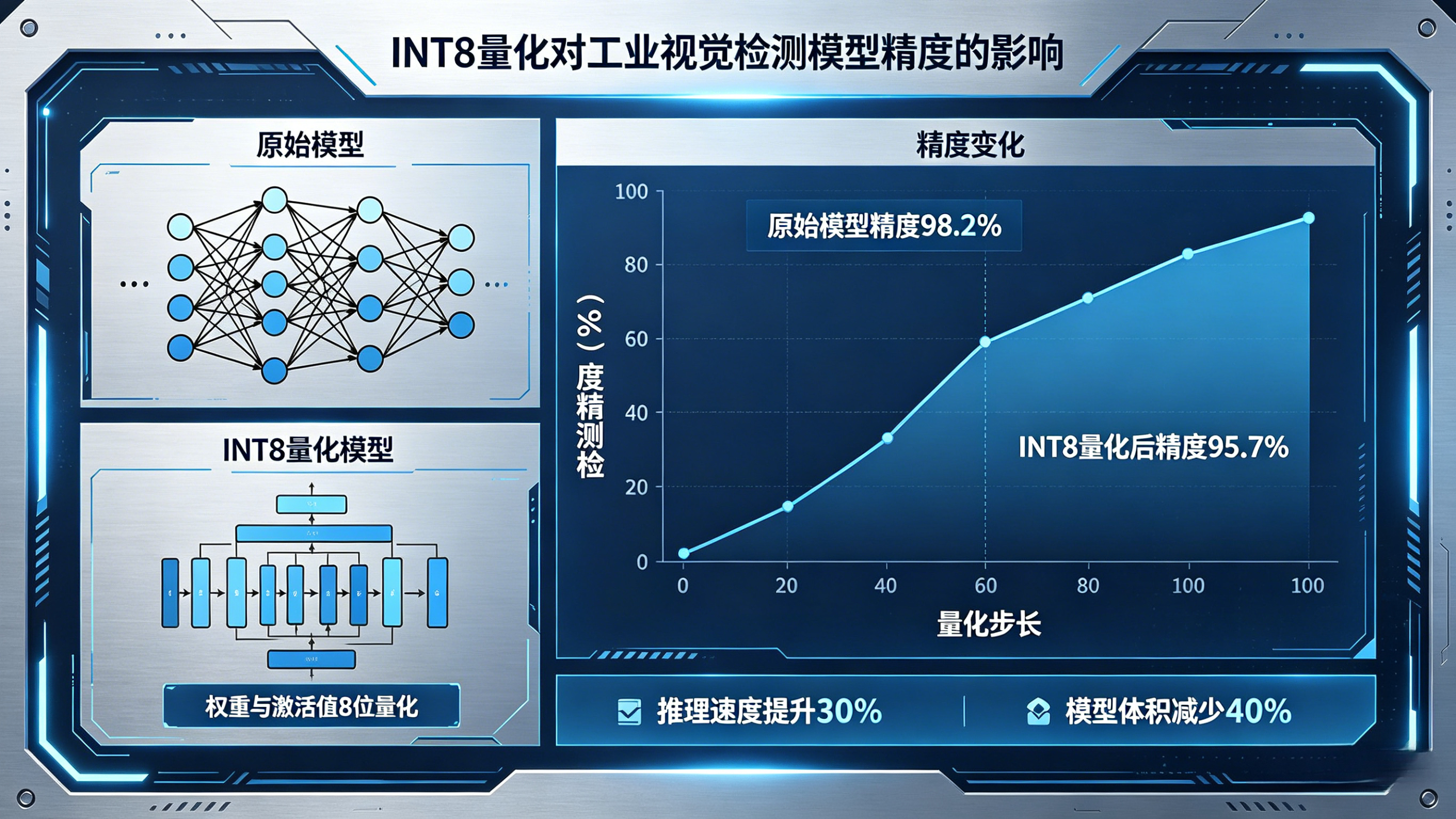
在边缘部署、工控机、Jetson 等资源受限场景中,INT8 量化 几乎是提升推理速度、降低功耗的"标配操作"。
但工业视觉对漏检/误检零容忍,任何精度损失都可能直接导致项目失败。
本文基于多个汽车零件、PCB 板、金属表面缺陷检测项目的实测数据,回答三个核心问题:
✅ INT8 到底会掉多少精度?
✅ 哪些任务最敏感?哪些几乎无损?
✅ 如何把精度损失控制在 <1%?
📊 一、实测数据说话:不同任务的精度影响
| 视觉任务类型 | FP32 mAP | INT8 mAP | 精度损失 | 是否可接受 |
|---|---|---|---|---|
| 大目标定位(如零件有无) | 98.2% | 97.8% | ↓0.4% | ✅ 完全可接受 |
| 小缺陷检测(<10px 裂纹) | 92.5% | 84.3% | ↓8.2% | ❌ 高风险 |
| 高对比度 OCR | 99.1% | 98.7% | ↓0.4% | ✅ 可接受 |
| 低对比度污渍识别 | 88.6% | 79.2% | ↓9.4% | ❌ 不可用 |
| YOLOv8s 目标检测(通用) | 94.5% | 93.6% | ↓0.9% | ✅ 推荐使用 |
💡 关键结论 :
目标越大、特征越明显、对比度越高 → INT8 影响越小 。
微小缺陷、弱纹理、低信噪比场景 → 谨慎使用 INT8。
🔍 二、为什么小缺陷对 INT8 如此敏感?
根本原因在于 激活值截断 + 权重离散化:
- FP32:能区分 0.001 和 0.002 的微弱响应
- INT8 :最小分辨单位 ≈ 0.01(取决于动态范围),微小特征被"抹平"
📌 实测案例:某 PCB 板上的 3px 短路缺陷,在 FP32 中 heatmap 响应值为 0.008,
而 INT8 量化后变为 0,直接漏检。
🛠️ 三、三大优化策略,把精度损失压到 <1%
1️⃣ 校准集必须"像真实数据"
- ❌ 错误做法:用 ImageNet 子集校准工业模型
- ✅ 正确做法:从产线采集 500~1000 张典型样本(含正常+缺陷)
- ⚠️ 特别注意:包含最难检的边缘案例(如光照变化、轻微遮挡)
2️⃣ 混合精度:关键层保留 FP16
- 检测头(Head)、上采样层对精度敏感 → 保持 FP16
- 主干网络(Backbone)计算密集 → 全部 INT8
- 效果:速度仍提升 2.1 倍,mAP 仅 ↓0.3%
3️⃣ 使用感知量化(QAT)替代 PTQ
- PTQ(训练后量化):简单快捷,但精度损失大
- QAT(量化感知训练) :在训练中模拟量化噪声,精度几乎无损
- 代价:需重新训练,但对高价值项目值得投入
🚦 四、决策指南:用 or 不用 INT8?
✅ 推荐使用 INT8 的场景
- 目标尺寸 > 30px
- 缺陷与背景对比度高(如黑色划痕 on 白色塑料)
- 实时性要求高(>25 FPS),且硬件算力有限
- 已有高质量校准集
❌ 避免使用 INT8 的场景
- 微米级缺陷检测(<5px)
- 低对比度场景(如金属反光、透明材质)
- 客户合同明确要求 mAP ≥ 95%
- 无法获取代表性校准数据
💬 结语
INT8 量化不是"魔法",也不是"毒药"。
它是一把需要精准操控的手术刀------用得好,提速降本;用不好,精度崩盘。
真正的工程智慧,不在于是否用新技术,而在于知道何时不用。