目录
1.摘要
针对无人机载重规格固定及受政策禁飞限制问题,本文构建了协同异构无人机与电动车路径规划模型,该模型引入了续航、载重及速度各异多型无人机,并针对禁飞区约束设计了绕路避让策略,使配送方案更贴近实际场景。为提升求解效率,算法采用了一种三层编码结构增强自适应大邻域搜索算法,通过最长绕路移除算子与禁飞区禁忌策略,有效解决了算法易陷入局部最优的问题,增强了全局搜索能力。
2.EVRP-HD-NFZ模型
问题陈述
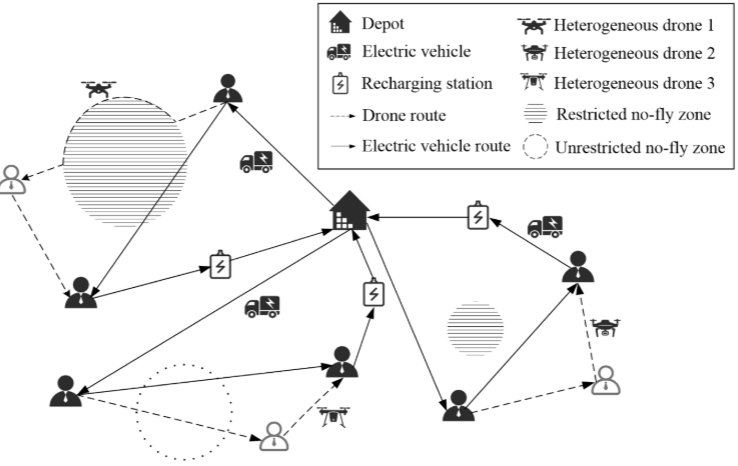
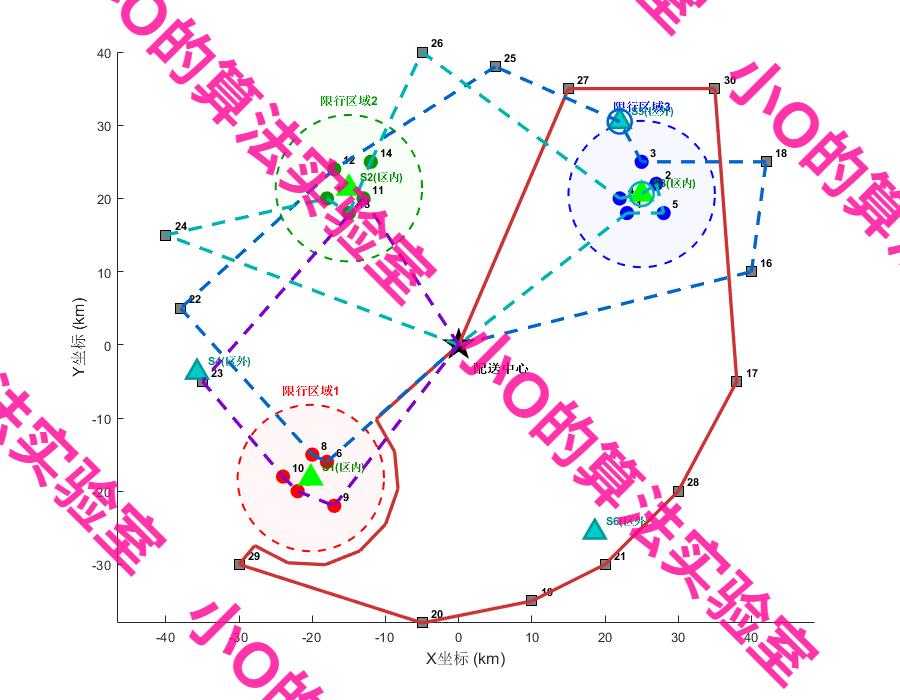
在EVRP-HD-NFZ问题中,配送网络由配送中心、客户点、充电站及异构无人机机队组成,在多重约束下优化电动汽车与无人机的协同路径最小化总配送耗时。电动汽车从中心出发后,可直接访问客户或作为无人机的移动发射与回收平台,且须实时监测电量并适时前往充电站。针对禁飞区限制,模型引入了时空动态特性:若无人机航线在特定时段内穿过受限区域,必须执行绕路策略;若不在受限时段,则允许直线穿行。
数学模型
EVRP-HD-NFZ模型通过几何计算判定无人机航线与禁飞区在时空维度上的冲突,计算绕路成本以最小化总配送完成时间为目标。
模型判定航线与禁飞区的空间交集,结合时间窗约束,识别是否存在时空重叠。若判定必须绕路,则采用切线避让策略,计算增加飞行弧长:
θ i j h = 2 arccos d i j h r h \theta_{ij}^{h} = 2 \arccos \frac{d_{ij}^{h}}{r_{h}} θijh=2arccosrhdijh
a d i j h = r h min ( θ i j h , 2 π − θ i j h ) − 2 r h sin θ i j h 2 ad_{ij}^{h} = r_{h} \min(\theta_{ij}^{h}, 2\pi - \theta_{ij}^{h}) - 2r_{h} \sin \frac{\theta_{ij}^{h}}{2} adijh=rhmin(θijh,2π−θijh)−2rhsin2θijh
目标最小化所有车辆中最后返回配送中心的时间,即最大完工时间:
min f = max v ∈ V { T i v } ; ∀ i ∈ N 0 ∖ { 0 } \min f = \max_{v \in V} \{T_i^v\}; \forall i \in N_0 \setminus \{0\} minf=v∈Vmax{Tiv};∀i∈N0∖{0}
3.EALNS算法
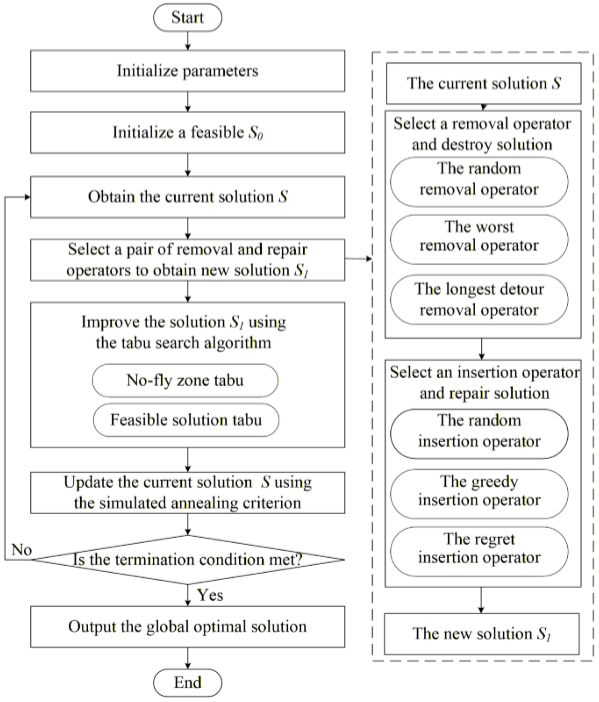
增强自适应大邻域搜索算法(EALNS)构建了三层编码方案,将电动汽车路径、无人机分配及绕路决策结合。针对禁飞区带来的路径冗余,算法提出最长绕路移除算子,通过识别并重构高成本飞行区段,显著加速了算法收敛并增强了跳出局部最优的能力。此外,算法引入了基于禁忌搜索逻辑的禁飞区禁忌策略,通过动态限制对特定绕路对象的重复探索,平衡了搜索的广度与深度。
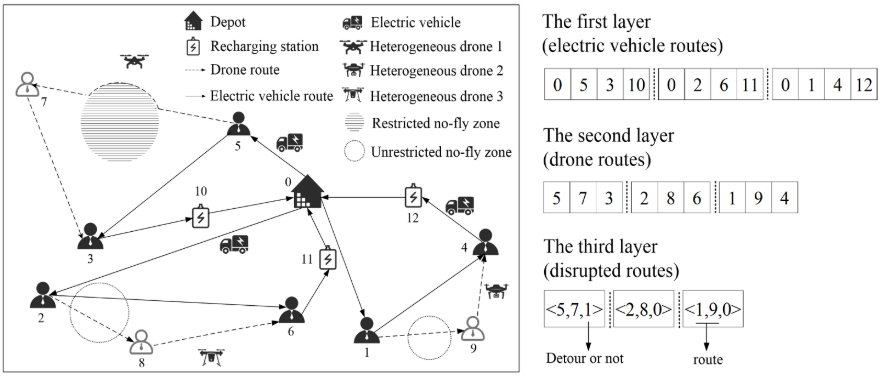
三层编码方案第一层定义电动汽车的配送路径及充电决策;第二层定义异构无人机的起降序列,并依据最短耗时原则匹配机型;第三层记录受禁飞区影响的航段信息。算法通过启发式策略生成初始解,即先利用贪婪插入法构建纯电动车路径,再根据时间节省最大化原则,将符合载荷与续航约束的客户点迁移至无人机配送。
在邻域搜索阶段,算法设计了最长绕路移除算子,专门移除受禁飞区限制导致高额时间成本的无人机航段,其时间复杂度为 O ( ∣ C d e t o u r ∣ log ∣ C d e t o u r ∣ ) O(|C_{detour}|\log|C_{detour}|) O(∣Cdetour∣log∣Cdetour∣)。在插入环节,通过贪婪或后悔算子将移除的客户重新分配至成本增加最小的位置。为防止陷入局部最优,算法集成了禁忌搜索(TS)机制,除传统的解禁忌外,算法引入禁飞区禁区,在迭代期内暂缓接受特定绕路方案。
算法采用轮盘赌自适应机制动态调整算子权重,每一周期根据算子贡献度更新其权重:
w i ′ = ( 1 − λ ) w i + λ s i c i w_i^{\prime}=(1-\lambda)w_i+\lambda\frac{s_i}{c_i} wi′=(1−λ)wi+λcisi
4.结果展示
5.参考文献
Chen W, Zhang S, Jiang K. Solving electric vehicle routing problem with heterogeneous drones and no-fly zones using enhanced adaptive large neighborhood search algorithmJ. Swarm and Evolutionary Computation, 2026, 104: 102382.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx