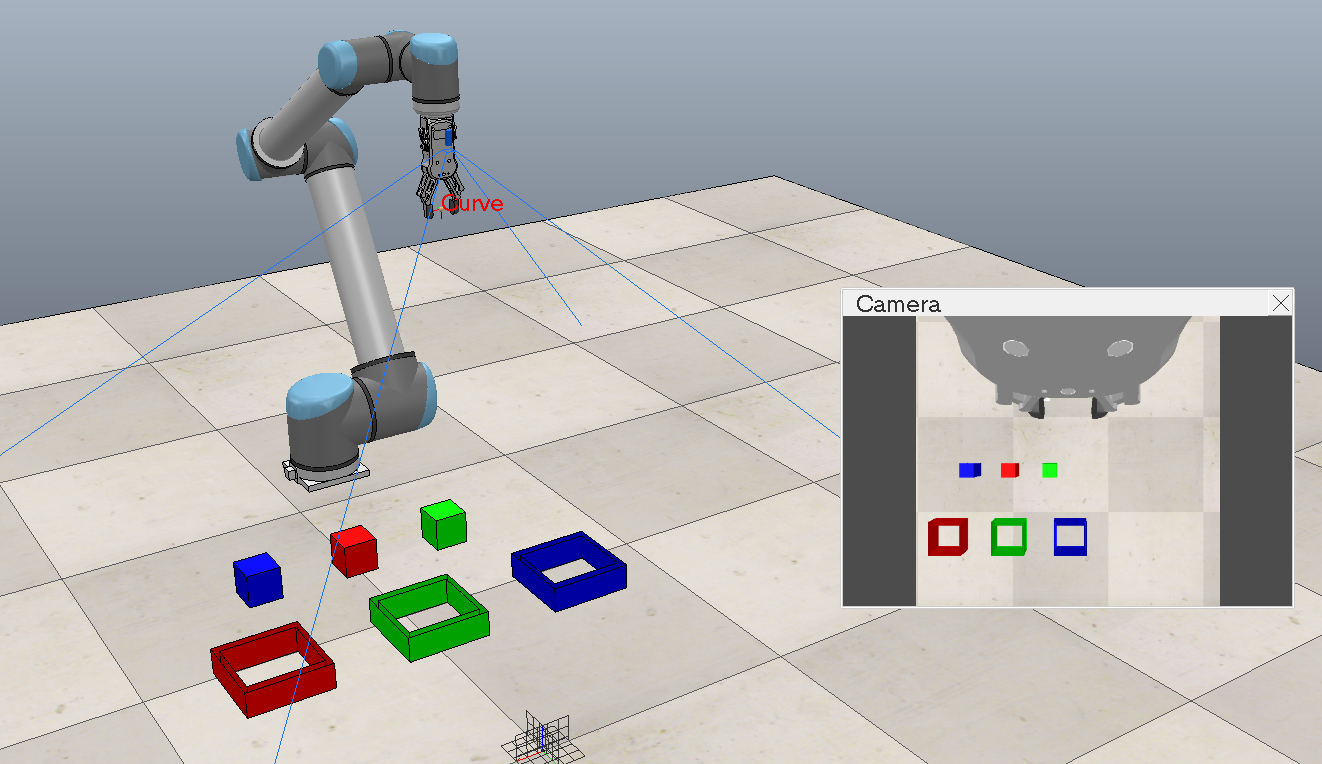
📌 本项目基于 CoppeliaSim + MATLAB 联合开发,实现了 UR5机械臂对红、黄、蓝三种物块的自动识别、抓取与分类投放。
✨ 项目亮点:
📷 视觉识别: 通过 EdgeBoxes 边缘检测+RGB阈值判断颜色;
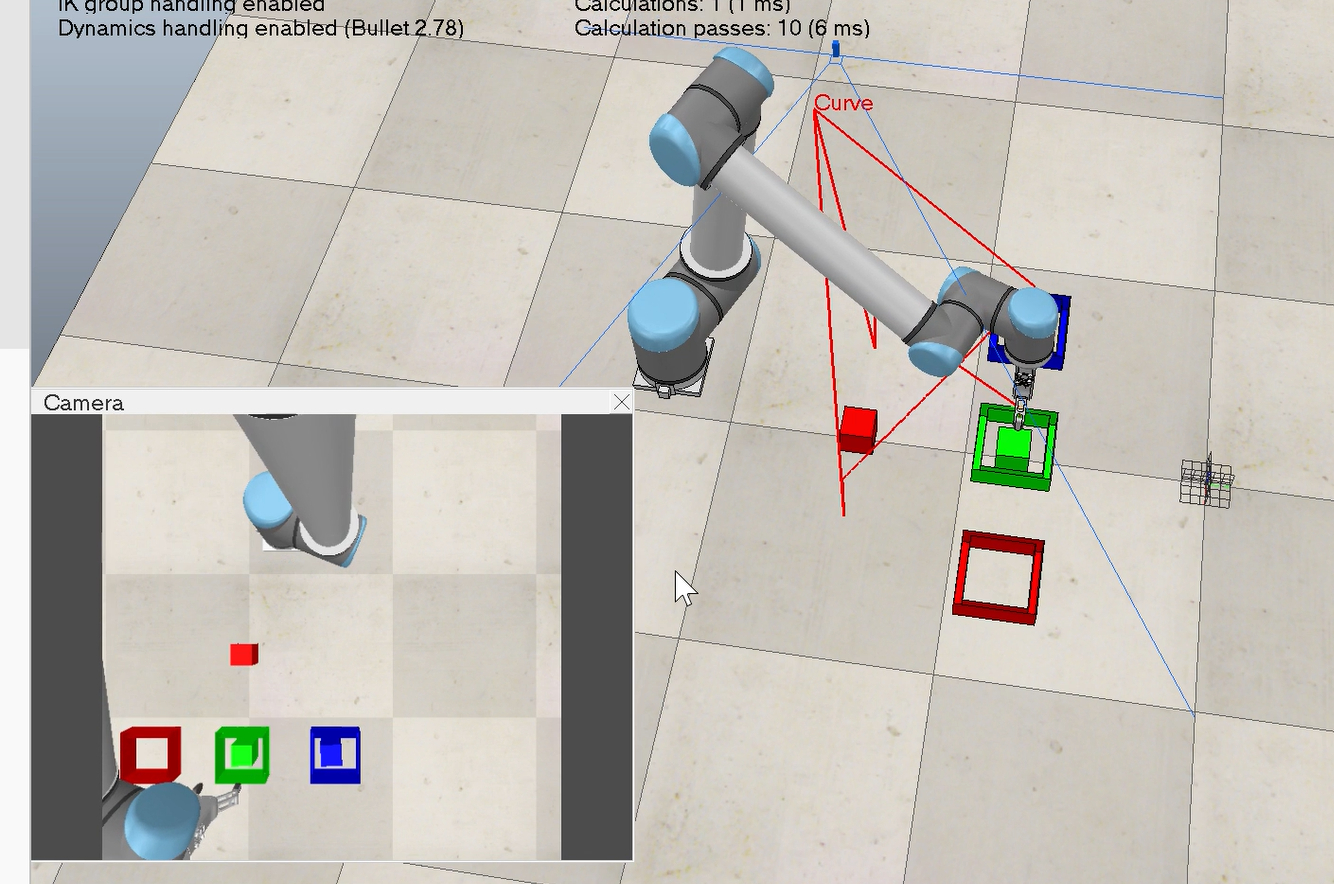
🤖 路径插值: 使用线性插值(moveLinear)实现抓取与放置过程的平滑过渡;
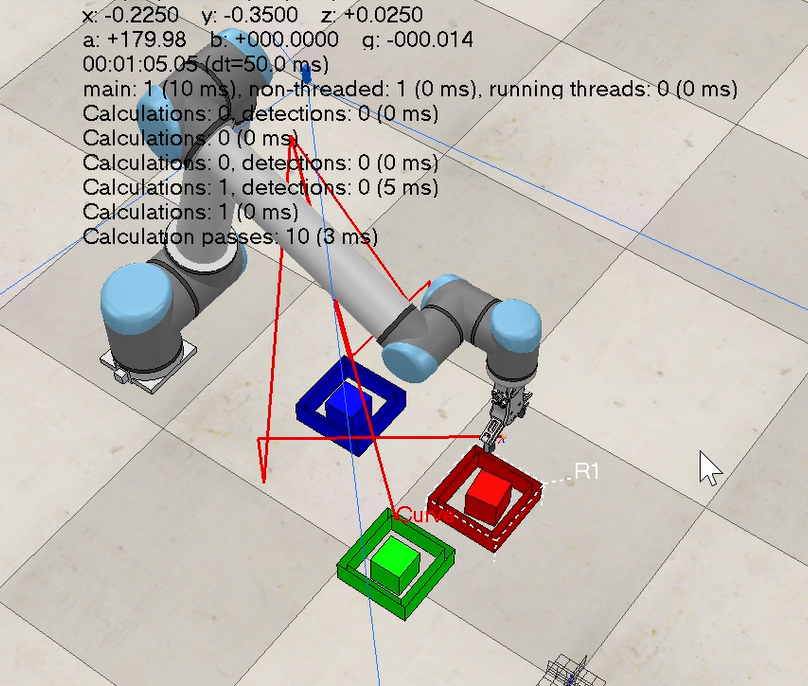
🧠 智能分拣: 自动识别颜色并投放至对应坐标系的收纳盒中;
💡 完全自动化: 支持连续处理多个物块,模拟真实流水线抓取操作。
🛠️ 工具环境:
CoppeliaSim V4.9.0
MATLAB R2024b(含图像处理工具箱)
EdgeBoxes 模型库(Piotr Dollar)
📈 本系统适用于智能制造、机器人视觉实验、自动分拣算法教学等场景。
视频 3D 机器人 教程 matlab
Coppeliasim 机械臂 视觉识别
效果如下:
视频效果:
作者简介:长期从事机器人/控制/规划/数学建模领域相关研究,涉及机械臂、轮式机器人、四足机器人、移动机械臂、轮足、机械双臂的建模及控制仿真。 接机器人/控制/规划领域毕业论文辅导 无论你是想入门避障、轨迹规划、轨迹优化、机械臂协同、人机协作、机器人轨迹跟踪,还是完全看不懂文献、对未来比较迷茫或者找工作不知如何下手,我都能提供专业建议,助你少走弯路。高效完成科研。 欢迎交流、讨论,3531225003@qq.com