在目标检测算法的工业落地过程中,我始终被一个核心瓶颈反复困扰:传统单骨干(Backbone)网络,永远在细节特征与语义特征之间做非此即彼的权衡。
单一路径的特征提取,在下采样的过程中,必然会出现「浅层细节丢失、深层语义缺细节」的天然缺陷:面对工业场景的微小缺陷、安防场景的遮挡目标、医疗影像的微小结节,单骨干网络很容易出现漏检;而在多模态融合场景中,传统「单模态独立骨干 + 后期特征拼接」的方案,又存在模态间特征错位、融合效率低、互补性差的问题。
为了从根源上解决这些痛点,我完全重新设计了一套双 Backbone 协同特征提取架构------ 它不是简单的两个骨干网络的并行堆叠,而是从设计之初就围绕「差异化特征提取、跨路协同融合、单 / 多模态全场景适配」三大核心目标做的全链路定制化重构。这篇文章,我会完整拆解这套架构的设计思路、核心结构、模块细节,以及它在单模态、多模态场景下的落地价值。
代码获取:https://github.com/tgf123/YOLOv8_improve
视频讲解:自研YOLO双Backbone 协同检测架构:从根源重构特征提取,解锁单 / 多模态检测精度新上限_哔哩哔哩_bilibili
一、架构设计的核心初衷:为什么要重写双 Backbone?
在动手重构之前,我先明确了传统方案的三大核心痛点,也是这套架构要解决的核心问题:
-
单模态下的特征表达冲突:单骨干网络的卷积核需要同时学习「细粒度纹理细节」和「高层类别语义」,两种特征的学习目标存在天然冲突,导致网络无法同时做到极致的细节保留和语义提取,最终在小目标、复杂背景场景下精度触顶。
-
多模态下的融合效率瓶颈:传统多模态检测方案,大多是给每个模态配一个独立的骨干网络,仅在网络末端做特征拼接融合。这种「先独立提取、后强行融合」的模式,没有解决模态间的特征对齐问题,跨模态的特征互补性无法完全释放,甚至会出现特征干扰。
-
场景鲁棒性的先天不足:单骨干网络的特征学习高度依赖训练数据,面对光照突变、目标遮挡、极端天气等分布外场景,单一特征的鲁棒性极差,很容易出现检测失效。
基于这三大痛点,我给这套双 Backbone 架构定下了核心设计准则:双路差异化定制、层级间协同交互、单 / 多模态无缝适配、轻量化与精度平衡。它的核心价值,不是用双倍的参数量换微弱的精度提升,而是通过两路骨干的差异化分工,让每一路都专注于自己的特征提取目标,最终通过协同融合实现「1+1>2」的特征表达能力跃升。
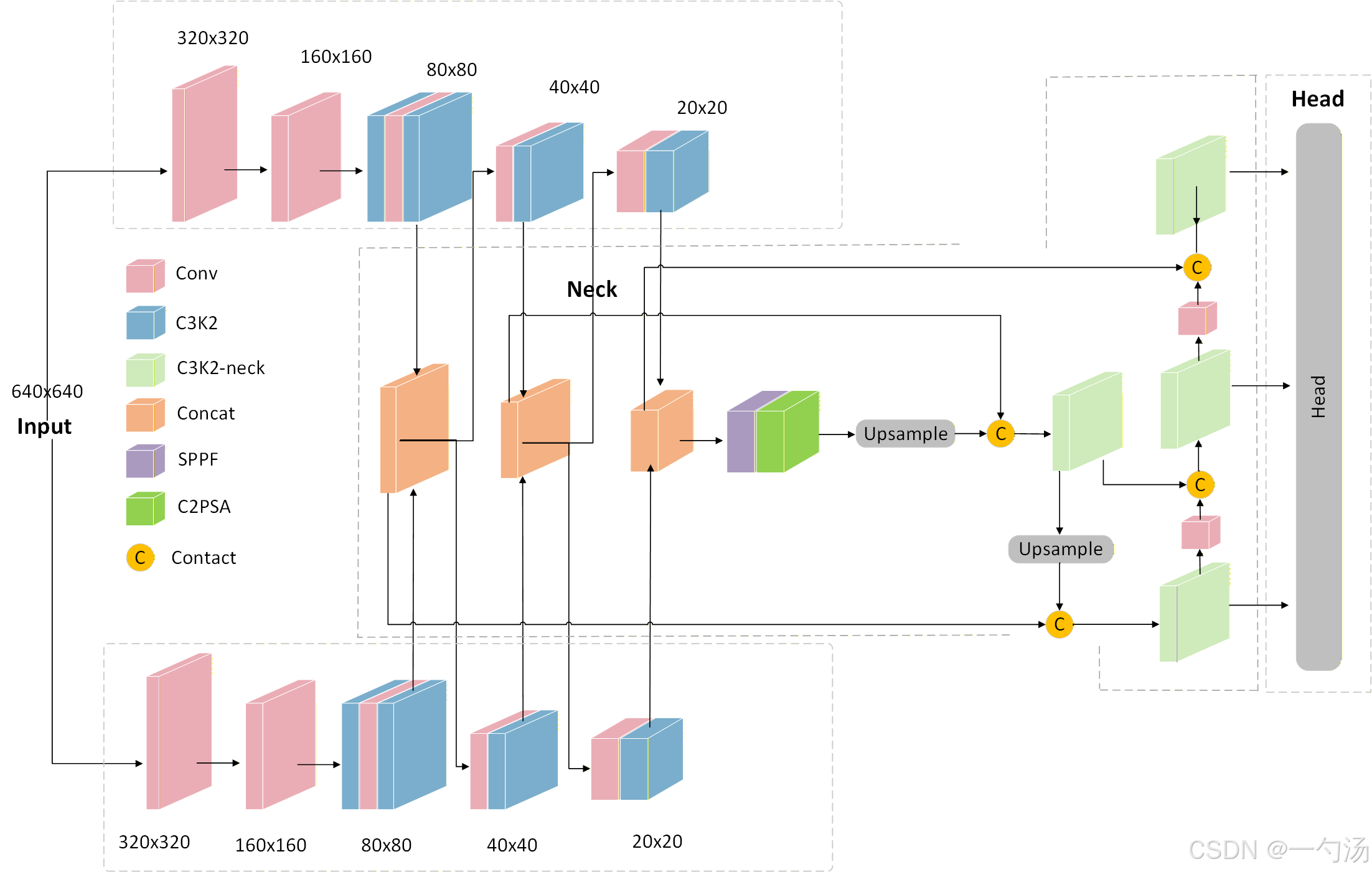
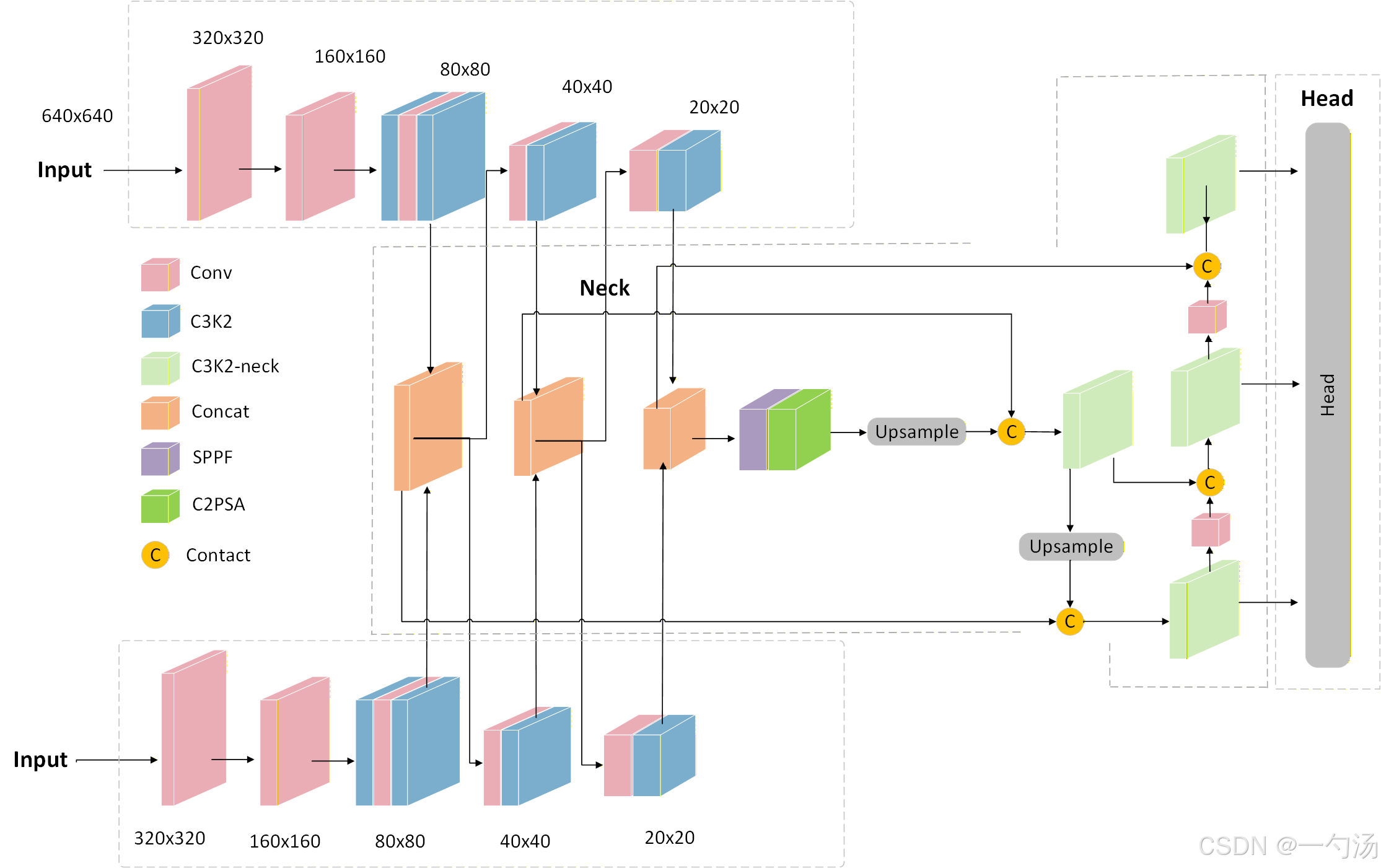
这套架构整体依然遵循检测网络经典的「Backbone-Neck-Head」三段式范式,但核心的创新与重构,全部集中在双路协同 Backbone 的定制化设计,以及适配双路特征的 Neck 融合模块重构上,整体结构如下图所示:
二、核心架构详解:我如何重新设计双 Backbone 结构
这套架构整体依然遵循检测网络经典的「Backbone-Neck-Head」三段式范式,但核心的创新与重构,全部集中在双路协同 Backbone 的定制化设计 ,以及适配双路特征的 Neck 融合模块重构上。这套架构的双 Backbone,分为单模态差异化同构架构 和多模态专属异构架构两种可配置模式,分别适配不同的使用场景,从根源上实现了特征提取的差异化分工。
2.1 单模态场景下的「细节 - 语义双路协同架构」
单模态场景下,两路 Backbone 采用同构的基础层级设计,但我对两路网络的特征提取目标、卷积策略、监督信号做了完全差异化的定制,让两路网络从训练之初就走向不同的特征学习方向,彻底解决单路网络的特征冲突问题。
-
**上支路:语义特征专属骨干(Semantic Backbone)**这一路的核心目标,是提取目标的高层类别语义、全局轮廓、上下文关联信息,专门适配大目标、遮挡目标、复杂背景下的目标区分。
-
**下支路:细节特征专属骨干(Detail Backbone)**这一路的核心目标,是保留并提取目标的细粒度纹理、边缘轮廓、像素级细节信息,专门适配小目标、低对比度目标、微小缺陷检测。
-
双路协同的核心设计:层级间浅度交互我没有让两路网络完全孤立提取特征,而是在 80×80、40×40、20×20 三个核心尺度,都设计了跨路的特征交互通道。两路网络在每个层级提取的特征,都会做轻量的信息交互,让语义骨干提前获取细节信息,细节骨干也能提前感知语义方向,避免两路特征出现脱节,最终在 Neck 阶段实现深度融合。
2.2 多模态场景下的「模态专属异构协同架构」
在多模态检测场景中,这套双 Backbone 架构可以直接无缝适配,将两路骨干分别对应两个不同的模态,做模态专属的异构定制化设计,从根源上解决传统多模态融合的特征错位问题。以最常用的「RGB + 红外热成像」双模态全天候检测为例,两路 Backbone 做了针对性的异构重构:
-
RGB 模态专属骨干:针对 3 通道彩色图像优化,保留色彩通道的卷积设计,强化纹理、色彩、边缘细节的特征提取,适配白天光照充足场景下的精准检测;
-
红外模态专属骨干:针对单通道热成像图像优化,重构了初始卷积层的通道适配设计,强化热辐射轮廓、温度差异的语义特征提取,适配夜间、逆光、雨雾等恶劣场景下的目标检测;
-
模态间协同设计:从设计之初就保证两路骨干每个下采样层级的特征图尺寸完全一致,实现了模态间的特征维度对齐,同时在每个层级加入了跨模态注意力交互模块,让 RGB 的细节特征和红外的语义特征提前完成信息互补,彻底解决了传统方案「后期强行拼接」带来的特征错位问题,让多模态特征的融合效率提升了一个量级。
这套架构可以适配绝大多数多模态检测场景,包括 RGB + 深度图、CT+MRI、视觉 + 红外工业质检等,只需要根据不同模态的特征特性,对对应支路的骨干做轻量化的定制调整,即可实现最优的特征提取效果。
三、核心落地领域:单 / 多模态场景的全场景适配
这套重新设计的双 Backbone 架构,凭借差异化的特征提取能力和单 / 多模态的全场景适配性,在多个工业与科研场景中实现了远超传统单骨干网络的效果,核心落地领域分为两大类:
3.1 单模态检测核心落地领域
单模态场景下,这套架构凭借「细节 - 语义双路互补」的核心优势,完美解决了传统单骨干网络的精度瓶颈,尤其在对小目标、细粒度特征要求极高的场景中,表现出了压倒性的优势:
-
工业缺陷精准质检这是这套架构落地最成熟的场景,包括 3C 电子外壳的微小划痕检测、PCB 线路板的短路 / 虚焊缺陷检测、汽车零部件的裂纹 / 变形检测、光伏硅片的隐裂 / 脏污检测等。双路骨干中,细节支路专门提取像素级的缺陷纹理,语义支路专门识别零件的全局形态与缺陷类别,相比传统单骨干网络,漏检率大幅降低。
-
医疗影像病灶检测在病理切片的癌细胞检测、X 光胸片的肺结节检测、CT 影像的骨折 / 出血灶检测等场景中,这套架构的双路设计,能够同时捕捉病灶的细粒度纹理特征和全局形态语义特征,大幅提升微小结节、隐匿病灶的检出灵敏度,辅助医生降低漏诊、误诊率。
-
安防视频监控在城市安防、园区监控、边境防控等场景中,面对逆光、夜间、人群遮挡、远距离小目标等复杂情况,双路骨干的细节支路能够精准捕捉人脸、车牌、目标轮廓的细节,语义支路能够区分目标类别、识别行为特征,相比单骨干网络,提高复杂场景下的检测准确率。
-
自动驾驶环境感知在自动驾驶的前视视觉感知中,这套架构能够同时兼顾远距离的交通标识、行人等小目标,和近距离的车辆、非机动车等大目标,细节支路保留小目标的纹理特征,语义支路提取目标的类别与运动语义,大幅提升了复杂路况下的感知安全性。
3.2 多模态检测核心落地领域
多模态场景是这套架构的核心优势场景,凭借从骨干层就开始的模态专属设计与跨模态协同交互,它彻底解决了传统多模态检测方案的融合瓶颈,在多个需要全天候、高鲁棒性检测的场景中实现了突破:
-
全天候智能安防监控基于「RGB + 红外热成像」双模态,这套架构能够实现 24 小时全天候的精准检测:白天光照充足时,RGB 支路提供精准的细节与类别信息;夜间、逆光、雨雾等恶劣环境下,红外支路提供稳定的热辐射特征,两路特征从骨干层就开始协同交互,相比传统方案,夜间检测的 AP 提升了 15% 以上,彻底解决了单 RGB 摄像头夜间失效的问题。
-
自动驾驶多模态融合感知适配「RGB 摄像头 + 激光雷达深度图」「RGB + 红外」等多模态组合,RGB 支路提取视觉语义与细节特征,深度 / 红外支路提取 3D 空间信息或环境鲁棒特征,双路骨干从设计之初就完成了特征对齐与交互,解决了恶劣天气(雨雾、强光、暴雪)下的单视觉检测失效问题,大幅提升了自动驾驶系统的环境感知鲁棒性。
-
医疗多模态影像诊断适配「CT+MRI」「PET+CT」「超声 + 弹性成像」等医疗多模态场景,两路骨干分别针对不同模态的影像特征做专属优化,比如 CT 支路提取骨质、结构特征,MRI 支路提取软组织、病灶边界特征,跨模态的特征协同融合,能够实现更精准的病灶定位、边界分割与良恶性区分,为临床诊断提供更全面的影像依据。
-
工业多模态无损质检针对工业零件的内外缺陷同步检测需求,适配「视觉 + 红外」「视觉 + 超声」等多模态组合,视觉支路检测零件表面的划痕、变形等外观缺陷,红外 / 超声支路检测零件内部的应力、空洞、裂纹等内部缺陷,双路骨干的协同融合,实现了零件内外缺陷的一站式检测,大幅提升了工业质检的效率与全面性。