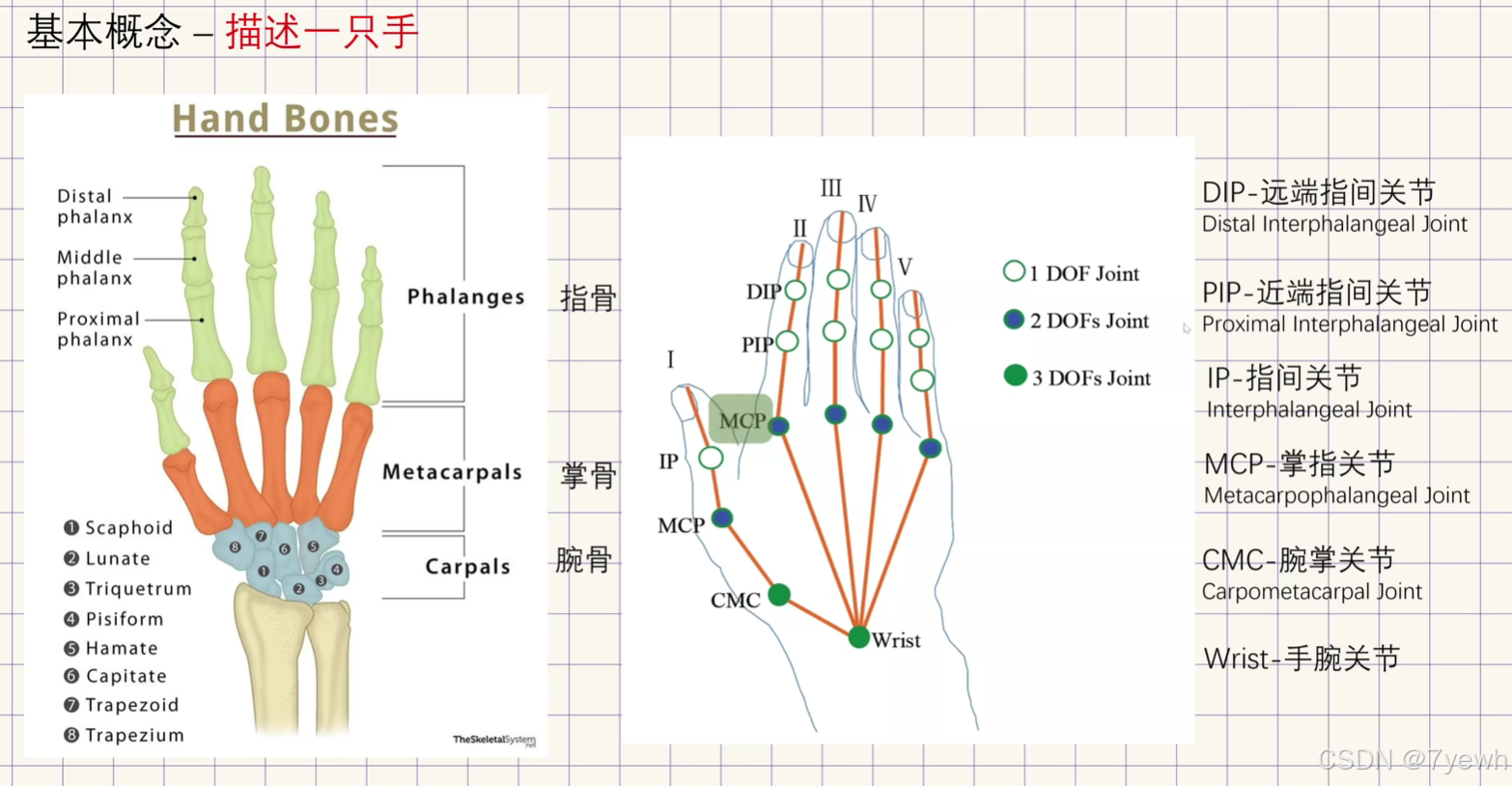
- 手的骨骼组成
一只手主要分三段:
| 部位 | 说明 |
|---|---|
| 指骨 Phalanges | 手指骨,负责手指弯曲和抓取 |
| 掌骨 Metacarpals | 手掌骨,连接手指和腕部 |
| 腕骨 Carpals | 手腕骨,连接前臂和手掌 |
其中手指的指骨又分为:
| 指骨 | 含义 |
|---|---|
| Distal phalanx | 远节指骨,指尖那一段 |
| Middle phalanx | 中节指骨,拇指没有这一段 |
| Proximal phalanx | 近节指骨,靠近手掌的一段 |
- 关节命名
| 缩写 | 中文 | 作用 |
|---|---|---|
| DIP | 远端指间关节 | 控制指尖弯曲 |
| PIP | 近端指间关节 | 控制中段手指弯曲 |
| IP | 指间关节 | 主要用于拇指 |
| MCP | 掌指关节 | 手指根部关节,控制弯曲/展开 |
| CMC | 腕掌关节 | 拇指灵活运动的关键 |
| Wrist | 手腕关节 | 控制整只手姿态 |
- 自由度重点
图里用颜色区分关节自由度:
| 类型 | 含义 |
|---|---|
| 1 DOF Joint | 单自由度关节,只能绕一个方向转动 |
| 2 DOFs Joint | 双自由度关节,可弯曲,也可左右摆动 |
| 3 DOFs Joint | 三自由度关节,运动更接近真实人体 |
主动自由度是指由电机、液压缸、气缸等驱动器直接控制的运动自由度,决定了灵巧手可以被主动控制的运动能力。
被动自由度是指不由驱动器直接控制,而是通过连杆、腱绳、齿轮耦合、几何约束或外部接触力产生运动的自由度,用于在减少驱动器数量的同时提升机构的整体运动能力。
| 方式 | 核心含义 | 优点 | 缺点 |
|---|---|---|---|
| 直驱 | 电机直接布置在关节附近,直接带动关节转动 | 控制精度高、响应快、结构关系清楚 | 体积大、重量高、成本高,手指容易变粗 |
| 腱绳驱动 | 电机放在手掌/前臂,通过钢丝绳、腱绳拉动手指 | 手指轻、结构紧凑、仿生程度高 | 绳索弹性/松弛会影响精度,维护和调试麻烦 |
| 连杆驱动 | 电机通过连杆机构带动多个关节联动 | 结构稳定、成本相对可控、适合欠驱动抓取 | 运动轨迹固定,单关节独立控制能力弱 |
那接下来就是驱动器了,简要的说明一下
驱动器 = 提供动力
传动结构 = 把动力传到关节
关节模块 = 最终产生手指运动
| 分类 | 典型形式 | 主要作用 | 常配结构 | 优点 | 缺点 |
|---|---|---|---|---|---|
| 舵机类 | 数字舵机、总线舵机 | 直接输出角度控制 | 连杆结构、简单直驱、低成本欠驱动手 | 控制简单、成本低、自带位置反馈、调试快 | 体积偏大、精度一般、寿命和力控能力有限 |
| 空心杯电机类 | 空心杯电机 + 编码器 | 提供小型高速旋转动力 | 腱绳驱动、微型关节、直驱关节 | 体积小、响应快、惯量低、适合小空间 | 单独扭矩小,通常必须配减速箱 |
| 减速电机类 | 电机 + 行星减速箱 / 齿轮箱 | 提高输出扭矩,降低转速 | 直驱、连杆、腱绳卷线机构 | 扭矩更大、控制稳定、适用范围广 | 体积增加,有齿隙,成本上升 |
| 丝杆/推杆类 | 电机 + 丝杆、电动推杆 | 将旋转运动转为直线推拉 | 连杆驱动、夹爪、大力低速关节 | 推力大、自锁性好、夹持稳定 | 速度慢、结构长、灵活性差 |
| 关节模块类 | 电机 + 减速器 + 编码器 + 外壳 + 控制板 | 形成独立可控关节单元 | 高主动自由度直驱手、模块化灵巧手 | 集成度高、装配方便、控制独立 | 成本高、重量大、尺寸和散热受限 |
| 腱绳执行单元类 | 电机 + 减速箱 + 卷线轮 + 腱绳 | 远程拉动手指关节 | 腱绳驱动、仿生灵巧手 | 手指轻、结构紧凑、仿生效果好 | 绳索松弛、弹性变形、维护调试麻烦 |
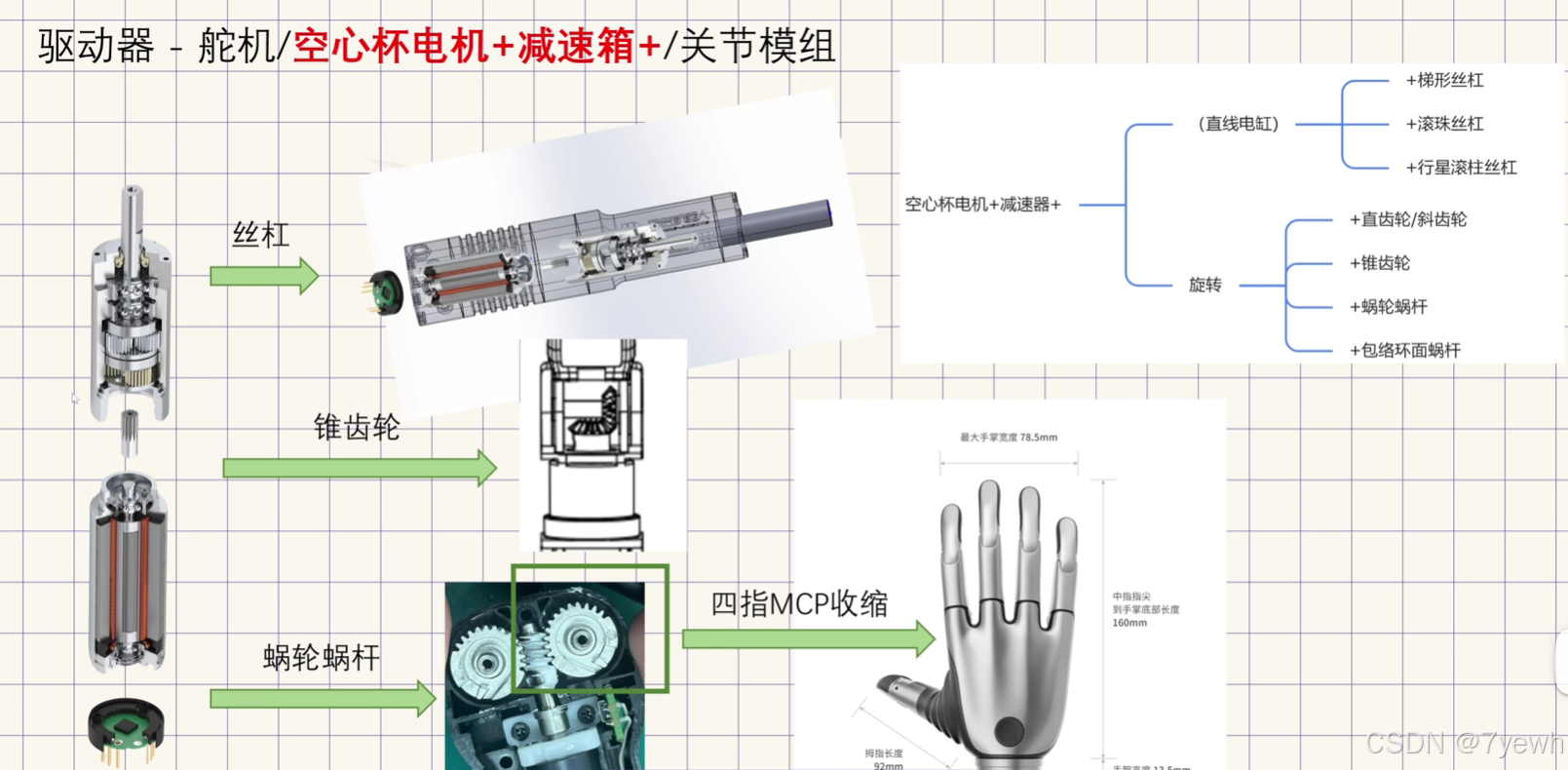
本质就是空心杯电机+减速器+旋转执行器