目录
1.摘要
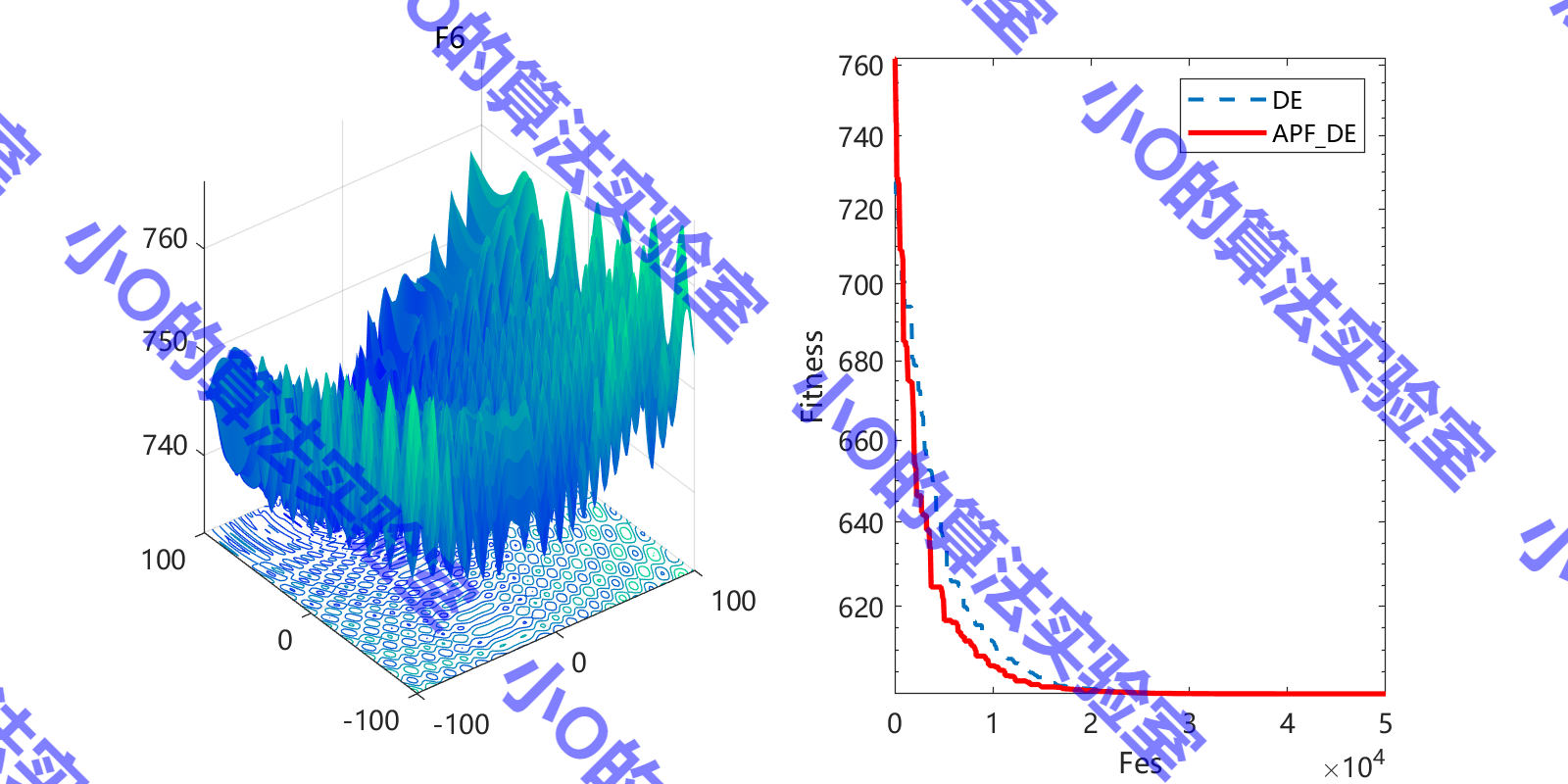
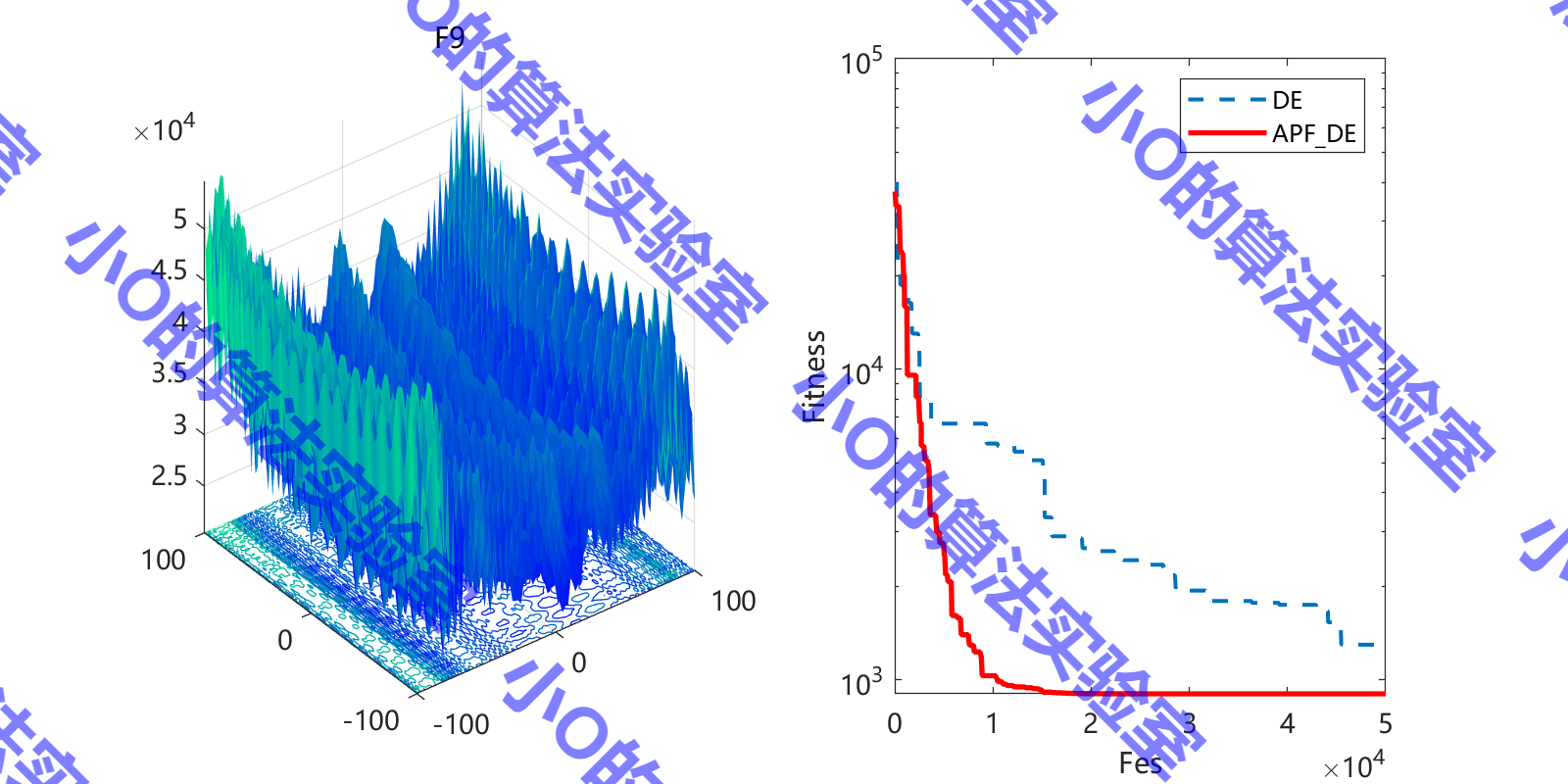
针对差分进化算法(DE)在复杂场景中易早熟收敛及搜索效率不足的局限性,本文受人工势场机制(APF)启发提出了一种基于虚拟力场引导的DE算法改进框架,将种群寻优过程与势场力学相结合,利用引力驱使个体向潜在最优区域靠拢,同时将劣质解视为虚拟障碍物释放斥力,从而有效规避搜索停滞风险,引导种群向高潜能区域高效演化。
2.基于人工势场的改进框架
进化算法变异策略
现有变异策略主要聚焦于利用多样化参考点构建差分向量组合,此类改进变异策略一般化结构可统一抽象为:
v = x i g + F 1 m v + F 2 p v \boldsymbol{v}=\boldsymbol{x}_i^g+F_1\boldsymbol{m}_v+F_2\boldsymbol{p}_v v=xig+F1mv+F2pv
m v = w 1 ( x t y p e 1 g − x t y p e 2 g ) + w 2 ( x t y p e 3 g − x t y p e 4 g ) + ... \boldsymbol{m}{v}=w{1}(\boldsymbol{x}{{\mathrm{type}1}}^{g}-\boldsymbol{x}{{\mathrm{type}2}}^{g})+w_{2}(\boldsymbol{x}{{\mathrm{type}3}}^{g}-\boldsymbol{x}{{\mathrm{type}4}}^{g})+\ldots mv=w1(xtype1g−xtype2g)+w2(xtype3g−xtype4g)+...
p v j ∼ π 1 D 1 + π 2 D 2 + ... p_{vj}\sim\pi_1D_1+\pi_2D_2+\ldots pvj∼π1D1+π2D2+...
其中, m v m_v mv 为基于不同参考点生成的加权差分向量组合; p v p_v pv 为采自特定或混合分布 (如 D 1 D_1 D1、 D 2 D_2 D2 )的扰动向量; x t y p e g x_\mathrm{type}^g xtypeg表示第 g g g 次迭代中按预设规则选取的参考点; p v j p_{vj} pvj 表示在第 j j j 维上的随机扰动; w w w和 π \pi π则分别对应差分向量与扰动向量的权重系数。
人工势场引入变异策略
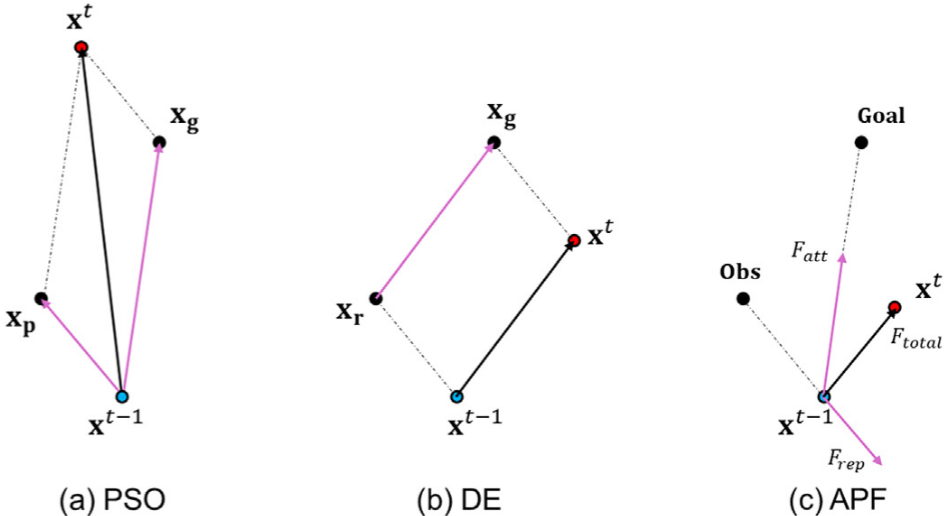
算法引入了基于相对距离动态调节的改进斥力模型,当前个体 x i ( g − 1 ) x_i^{(g-1)} xi(g−1)受到来自目标 x 0 ( g − 1 ) x_0^{(g-1)} x0(g−1) 的引力与来自障碍物 x r ( g − 1 ) x_r^{(g-1)} xr(g−1) 的改进斥力分别定义为:
F a t t ( x i ( g − 1 ) , x 0 ( g − 1 ) ) = k ( x 0 ( g − 1 ) − x i ( g − 1 ) ) \boldsymbol{F}_{\mathrm{att}}(\boldsymbol{x}_i^{(g-1)},\boldsymbol{x}_0^{(g-1)})=k(\boldsymbol{x}_0^{(g-1)}-\boldsymbol{x}_i^{(g-1)}) Fatt(xi(g−1),x0(g−1))=k(x0(g−1)−xi(g−1))
F r e p ( x i ( g − 1 ) , x r ( g − 1 ) ) = { η ( 1 d i − 1 d 0 ) ∥ x i ( g − 1 ) − x 0 ( g − 1 ) ∥ 2 d i 3 ( x i ( g − 1 ) − x r ( g − 1 ) ) , i f d i ≤ d 0 0 , i f d i > d 0 F_{\mathrm{rep}}(\boldsymbol{x}_i^{(g-1)},\boldsymbol{x}_r^{(g-1)})=\begin{cases}\eta\left(\frac1{d_i}-\frac1{d_0}\right)\frac{\|\boldsymbol{x}_i^{(g-1)}-\boldsymbol{x}_0^{(g-1)}\|^2}{d_i^3}(\boldsymbol{x}_i^{(g-1)}-\boldsymbol{x}_r^{(g-1)}),&\mathrm{if~}d_i\leq d_0\\\mathbf{0},&\mathrm{if~}d_i>d_0&\end{cases} Frep(xi(g−1),xr(g−1))=⎩ ⎨ ⎧η(di1−d01)di3∥xi(g−1)−x0(g−1)∥2(xi(g−1)−xr(g−1)),0,if di≤d0if di>d0
个体在搜索空间中受到的合力由引力与斥力线性叠加构成:
F t o t a l ( x i ( g − 1 ) , x 0 ( g − 1 ) ) = F a t t ( x i ( g − 1 ) , x 0 ( g − 1 ) ) + F r e p ( x i ( g − 1 ) , x r ( g − 1 ) ) \boldsymbol{F}{{\mathrm{total}}}(\boldsymbol{x}{i}^{(g-1)},\boldsymbol{x}{0}^{(g-1)})=\boldsymbol{F}{{\mathrm{att}}}(\boldsymbol{x}{i}^{(g-1)},\boldsymbol{x}{0}^{(g-1)})+\boldsymbol{F}{{\mathrm{rep}}}(\boldsymbol{x}{i}^{(g-1)},\boldsymbol{x}_{r}^{(g-1)}) Ftotal(xi(g−1),x0(g−1))=Fatt(xi(g−1),x0(g−1))+Frep(xi(g−1),xr(g−1))
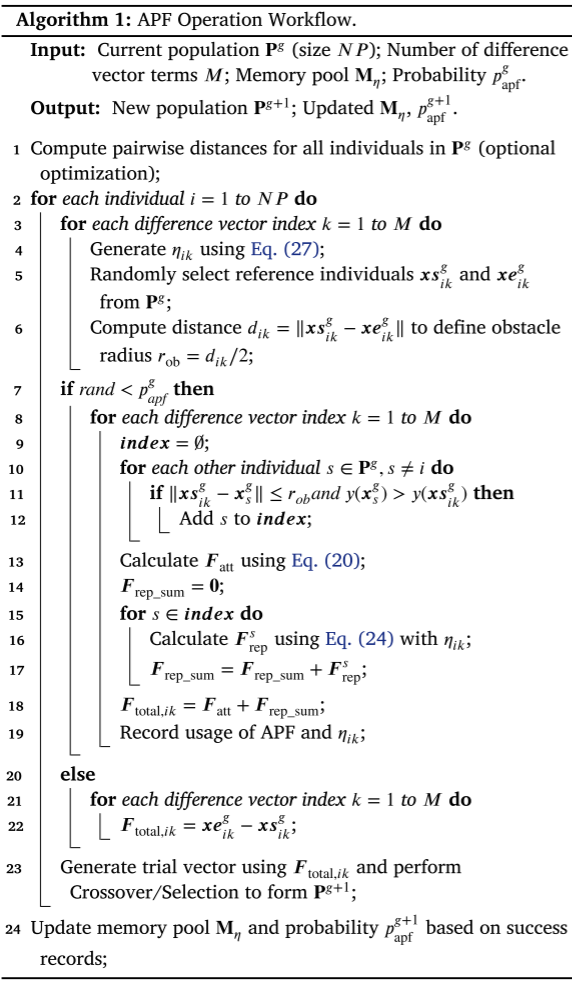
将上述合力场模型嵌入进化变异阶段,DE算法中差分参考向量可重构为多组参考点间总力的加权组合:
m v = w 1 F t o t a l ( x t y p e 2 ( g − 1 ) , x t y p e 1 ( g − 1 ) ) + w 2 F t o t a l ( x t y p e 3 ( g − 1 ) , x t y p e 4 ( g − 1 ) ) + ... \boldsymbol{m}v=w_1\boldsymbol{F}{\mathrm{total}}(\boldsymbol{x}{\mathrm{type2}}^{(g-1)},\boldsymbol{x}{\mathrm{type1}}^{(g-1)})+w_2\boldsymbol{F}{\mathrm{total}}(\boldsymbol{x}{\mathrm{type3}}^{(g-1)},\boldsymbol{x}_{\mathrm{type4}}^{(g-1)})+\ldots mv=w1Ftotal(xtype2(g−1),xtype1(g−1))+w2Ftotal(xtype3(g−1),xtype4(g−1))+...
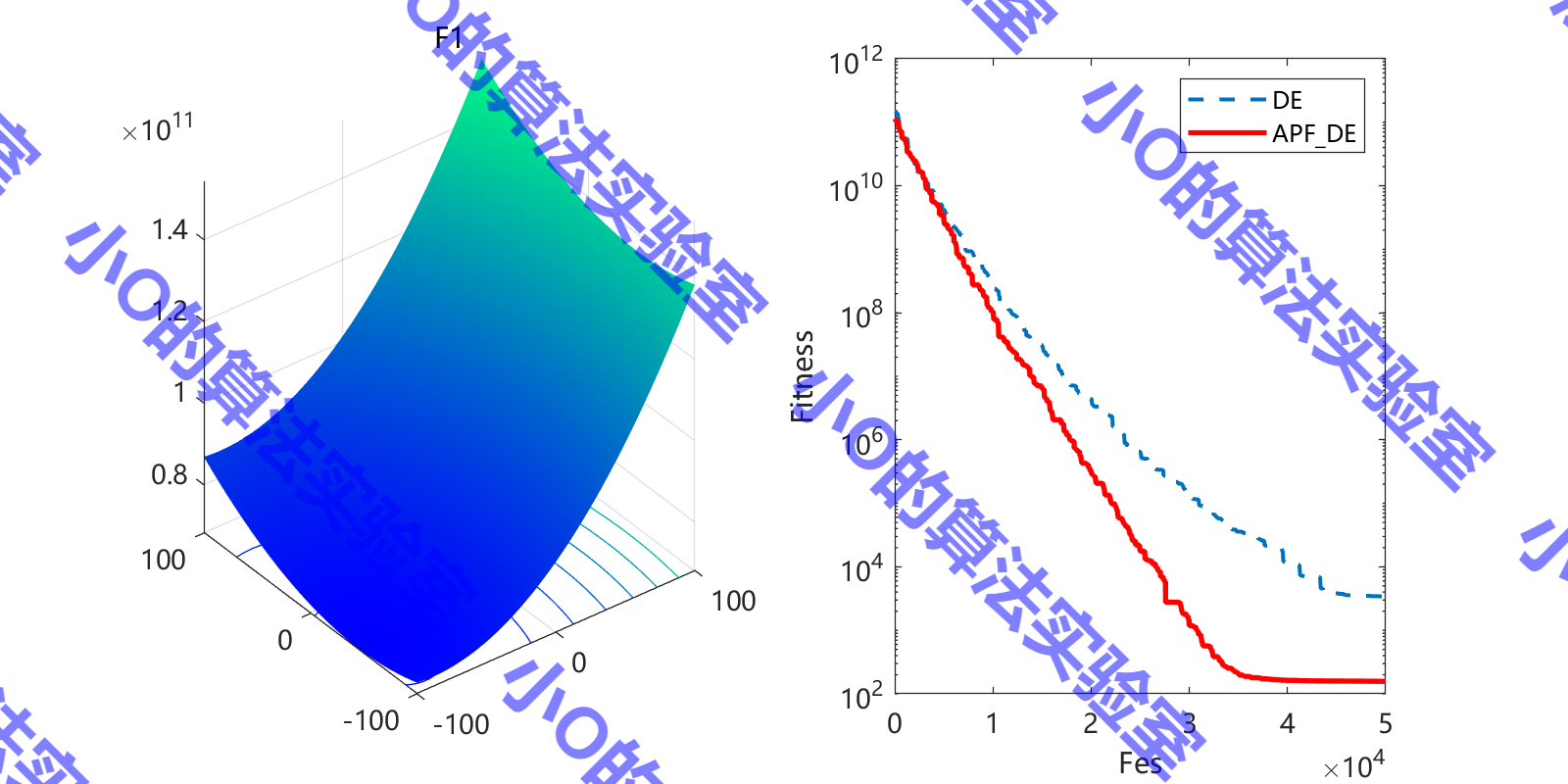
3.结果展示
4.参考文献
Yang Z, Deng L, Mao X, et al. A differential evolutionary algorithm improvement framework based on artificial potential fieldsJ. Applied Soft Computing, 2026: 114714.
5.代码获取
xx
6.算法辅导·应用定制·读者交流
xx