Form1.cs
cs
using System;
using System.Collections.Generic;
using System.Diagnostics;
using System.Drawing;
using System.IO;
using System.Windows.Forms;
using OpenCvSharp;
using RFDETRDetector.TensorRT;
using RFDETRSegmentor.TensorRT;
using Point = OpenCvSharp.Point;
using Size = OpenCvSharp.Size;
namespace DML
{
public partial class Form1 : Form
{
// 模型实例
private RfDetrModelTensorRt _detector;
private RFDETRSEGTensorRt _segmentor;
// 当前图片路径
private string _imagePath = "";
// 计时
private Stopwatch _stopwatch = new Stopwatch();
// 模型文件路径(请根据实际路径修改)
private readonly string _detectorEnginePath = @"models/rfdetr_det.engine";
private readonly string _segmentorEnginePath = @"models/rfdetr_seg.engine";
private readonly string _classesPath = @"models/classes.txt";
public Form1()
{
InitializeComponent();
// 加载模型(如果文件存在)
LoadModels();
}
private void LoadModels()
{
try
{
if (File.Exists(_detectorEnginePath))
{
_detector = new RfDetrModelTensorRt(_detectorEnginePath, _classesPath);
toolStripStatusLabel1.Text = "检测模型已加载";
}
else
{
toolStripStatusLabel1.Text = "检测模型文件不存在";
}
if (File.Exists(_segmentorEnginePath))
{
_segmentor = new RFDETRSEGTensorRt(_segmentorEnginePath, _classesPath);
toolStripStatusLabel2.Text = "分割模型已加载";
}
else
{
toolStripStatusLabel2.Text = "分割模型文件不存在";
}
}
catch (Exception ex)
{
MessageBox.Show($"模型加载失败: {ex.Message}", "错误", MessageBoxButtons.OK, MessageBoxIcon.Error);
}
}
/// <summary>
/// 选择图片按钮
/// </summary>
private void BtnOpenImage_Click(object sender, EventArgs e)
{
using (OpenFileDialog ofd = new OpenFileDialog())
{
ofd.Filter = "图片文件|*.bmp;*.jpg;*.jpeg;*.png;*.tiff";
ofd.Title = "选择图片";
if (ofd.ShowDialog() != DialogResult.OK) return;
_imagePath = ofd.FileName;
pictureBox1.Image = new Bitmap(_imagePath);
pictureBox2.Image = null;
textBox1.Clear();
}
}
/// <summary>
/// 目标检测推理
/// </summary>
private async void BtnDetect_Click(object sender, EventArgs e)
{
if (string.IsNullOrEmpty(_imagePath))
{
MessageBox.Show("请先选择图片", "提示", MessageBoxButtons.OK, MessageBoxIcon.Information);
return;
}
if (_detector == null)
{
MessageBox.Show("检测模型未加载", "错误", MessageBoxButtons.OK, MessageBoxIcon.Error);
return;
}
btnDetect.Enabled = false;
btnSegment.Enabled = false;
pictureBox2.Image = null;
textBox1.Clear();
try
{
// 读取图像
using (Mat img = Cv2.ImRead(_imagePath))
{
if (img.Empty())
{
MessageBox.Show("无法读取图片", "错误", MessageBoxButtons.OK, MessageBoxIcon.Error);
return;
}
// 执行推理(这里假设我们的 TensorRT 类已提供每个阶段的耗时,但为了简单,我们整体计时)
_stopwatch.Restart();
var results = _detector.Predict(img, 0.5f);
_stopwatch.Stop();
long totalMs = _stopwatch.ElapsedMilliseconds;
// 绘制结果
using (Mat resultMat = DrawDetectionResults(img, results))
{
// 转换为 Bitmap 并显示
using (var ms = resultMat.ToMemoryStream())
{
pictureBox2.Image = new Bitmap(ms);
}
}
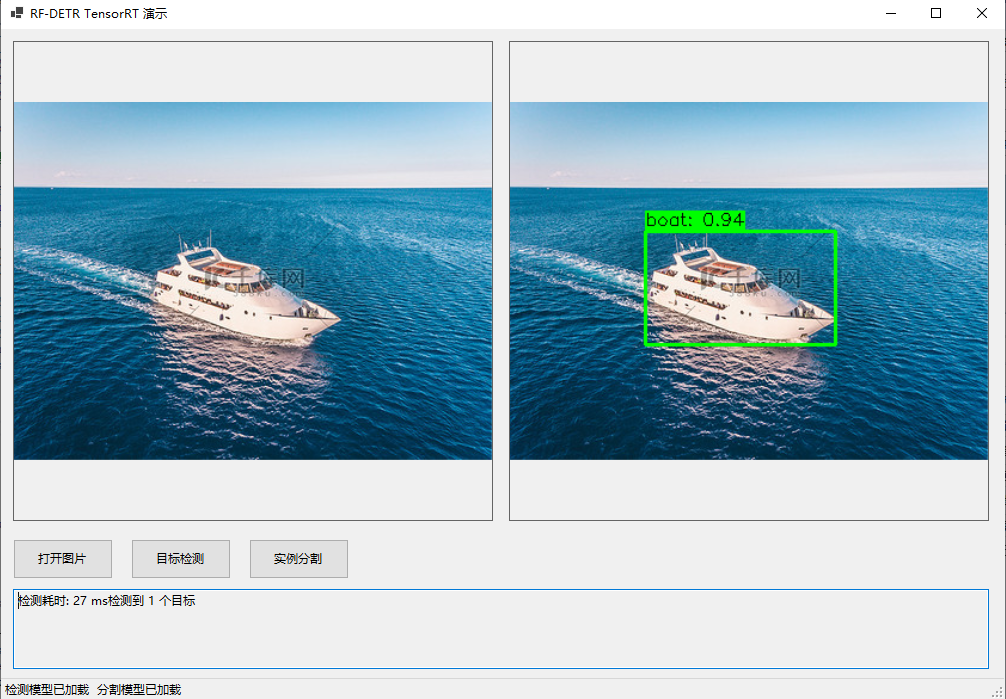
textBox1.Text = $"检测耗时: {totalMs} ms\n检测到 {results.Count} 个目标";
}
}
catch (Exception ex)
{
MessageBox.Show($"推理出错: {ex.Message}", "错误", MessageBoxButtons.OK, MessageBoxIcon.Error);
}
finally
{
btnDetect.Enabled = true;
btnSegment.Enabled = true;
}
}
/// <summary>
/// 分割推理
/// </summary>
private async void BtnSegment_Click(object sender, EventArgs e)
{
if (string.IsNullOrEmpty(_imagePath))
{
MessageBox.Show("请先选择图片", "提示", MessageBoxButtons.OK, MessageBoxIcon.Information);
return;
}
if (_segmentor == null)
{
MessageBox.Show("分割模型未加载", "错误", MessageBoxButtons.OK, MessageBoxIcon.Error);
return;
}
btnDetect.Enabled = false;
btnSegment.Enabled = false;
pictureBox2.Image = null;
textBox1.Clear();
try
{
using (Mat img = Cv2.ImRead(_imagePath))
{
if (img.Empty())
{
MessageBox.Show("无法读取图片", "错误", MessageBoxButtons.OK, MessageBoxIcon.Error);
return;
}
_stopwatch.Restart();
var results = _segmentor.Predict(img, 0.5f, 0.3f);
_stopwatch.Stop();
long totalMs = _stopwatch.ElapsedMilliseconds;
// 绘制分割结果(边界框 + 掩码叠加)
using (Mat resultMat = DrawSegmentationResults(img, results))
{
using (var ms = resultMat.ToMemoryStream())
{
pictureBox2.Image = new Bitmap(ms);
}
}
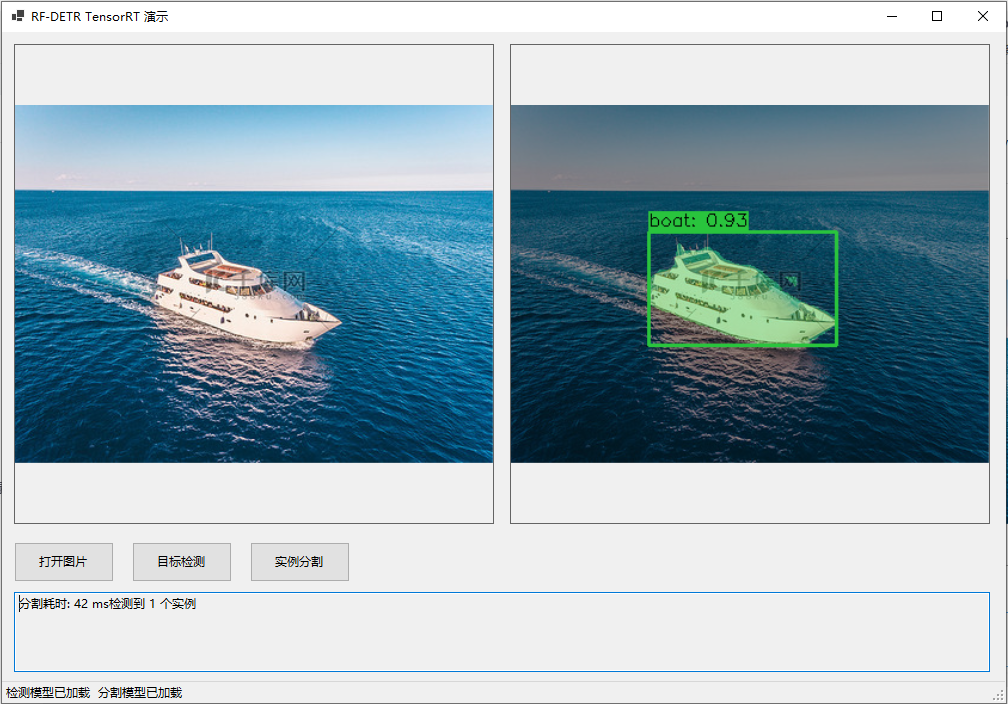
textBox1.Text = $"分割耗时: {totalMs} ms\n检测到 {results.Count} 个实例";
}
}
catch (Exception ex)
{
MessageBox.Show($"推理出错: {ex.Message}", "错误", MessageBoxButtons.OK, MessageBoxIcon.Error);
}
finally
{
btnDetect.Enabled = true;
btnSegment.Enabled = true;
}
}
/// <summary>
/// 绘制目标检测结果(边界框 + 标签)
/// </summary>
private Mat DrawDetectionResults(Mat image, List<RfDetrModelTensorRt.DetectionResult> results)
{
Mat output = image.Clone();
foreach (var res in results)
{
// 绘制矩形框
Cv2.Rectangle(output, res.BoundingBox, new Scalar(0, 255, 0), 2);
// 绘制标签背景
string label = $"{res.Label}: {res.Confidence:F2}";
int baseline;
Size textSize = Cv2.GetTextSize(label, HersheyFonts.HersheySimplex, 0.5, 1, out baseline);
Point pt = new Point(res.BoundingBox.X, res.BoundingBox.Y - 5);
if (pt.Y < 0) pt.Y = res.BoundingBox.Y + textSize.Height + 5;
Cv2.Rectangle(output, new Rect(pt.X, pt.Y - textSize.Height, textSize.Width, textSize.Height + baseline),
new Scalar(0, 255, 0), -1);
Cv2.PutText(output, label, new Point(pt.X, pt.Y), HersheyFonts.HersheySimplex, 0.5, new Scalar(0, 0, 0), 1);
}
return output;
}
/// <summary>
/// 绘制分割结果(边界框 + 半透明掩码叠加)
/// </summary>
private Mat DrawSegmentationResults(Mat image, List<RFDETRSEGTensorRt.SegmentationResult> results)
{
Mat output = image.Clone();
Random rand = new Random();
foreach (var res in results)
{
// 随机颜色
Scalar color = new Scalar(rand.Next(0, 255), rand.Next(0, 255), rand.Next(0, 255));
// 绘制掩码(半透明叠加)
if (res.Mask != null && !res.Mask.Empty())
{
// 将二值掩码转换为彩色掩码并叠加
Mat maskColor = new Mat();
Cv2.CvtColor(res.Mask, maskColor, ColorConversionCodes.GRAY2BGR);
// 调整颜色为目标类别颜色
maskColor.SetTo(color, res.Mask);
// 与原图加权叠加
Cv2.AddWeighted(output, 0.6, maskColor, 0.4, 0, output);
maskColor.Dispose();
}
// 绘制边界框
Cv2.Rectangle(output, res.BoundingBox, color, 2);
// 绘制标签
string label = $"{res.Label}: {res.Confidence:F2}";
int baseline;
Size textSize = Cv2.GetTextSize(label, HersheyFonts.HersheySimplex, 0.5, 1, out baseline);
Point pt = new Point(res.BoundingBox.X, res.BoundingBox.Y - 5);
if (pt.Y < 0) pt.Y = res.BoundingBox.Y + textSize.Height + 5;
Cv2.Rectangle(output, new Rect(pt.X, pt.Y - textSize.Height, textSize.Width, textSize.Height + baseline),
color, -1);
Cv2.PutText(output, label, new Point(pt.X, pt.Y), HersheyFonts.HersheySimplex, 0.5, new Scalar(0, 0, 0), 1);
}
return output;
}
/// <summary>
/// 释放模型资源
/// </summary>
protected override void OnFormClosing(FormClosingEventArgs e)
{
_detector?.Dispose();
_segmentor?.Dispose();
base.OnFormClosing(e);
}
}
}Form1.Designer.cs
cs
namespace DML
{
partial class Form1
{
private System.ComponentModel.IContainer components = null;
protected override void Dispose(bool disposing)
{
if (disposing && (components != null))
{
components.Dispose();
}
base.Dispose(disposing);
}
private void InitializeComponent()
{
this.pictureBox1 = new System.Windows.Forms.PictureBox();
this.pictureBox2 = new System.Windows.Forms.PictureBox();
this.btnOpenImage = new System.Windows.Forms.Button();
this.btnDetect = new System.Windows.Forms.Button();
this.btnSegment = new System.Windows.Forms.Button();
this.textBox1 = new System.Windows.Forms.TextBox();
this.statusStrip1 = new System.Windows.Forms.StatusStrip();
this.toolStripStatusLabel1 = new System.Windows.Forms.ToolStripStatusLabel();
this.toolStripStatusLabel2 = new System.Windows.Forms.ToolStripStatusLabel();
((System.ComponentModel.ISupportInitialize)(this.pictureBox1)).BeginInit();
((System.ComponentModel.ISupportInitialize)(this.pictureBox2)).BeginInit();
this.statusStrip1.SuspendLayout();
this.SuspendLayout();
// pictureBox1
this.pictureBox1.BorderStyle = System.Windows.Forms.BorderStyle.FixedSingle;
this.pictureBox1.Location = new System.Drawing.Point(12, 12);
this.pictureBox1.Name = "pictureBox1";
this.pictureBox1.Size = new System.Drawing.Size(480, 480);
this.pictureBox1.SizeMode = System.Windows.Forms.PictureBoxSizeMode.Zoom;
this.pictureBox1.TabIndex = 0;
this.pictureBox1.TabStop = false;
// pictureBox2
this.pictureBox2.BorderStyle = System.Windows.Forms.BorderStyle.FixedSingle;
this.pictureBox2.Location = new System.Drawing.Point(508, 12);
this.pictureBox2.Name = "pictureBox2";
this.pictureBox2.Size = new System.Drawing.Size(480, 480);
this.pictureBox2.SizeMode = System.Windows.Forms.PictureBoxSizeMode.Zoom;
this.pictureBox2.TabIndex = 1;
this.pictureBox2.TabStop = false;
// btnOpenImage
this.btnOpenImage.Location = new System.Drawing.Point(12, 510);
this.btnOpenImage.Name = "btnOpenImage";
this.btnOpenImage.Size = new System.Drawing.Size(100, 40);
this.btnOpenImage.TabIndex = 2;
this.btnOpenImage.Text = "打开图片";
this.btnOpenImage.UseVisualStyleBackColor = true;
this.btnOpenImage.Click += new System.EventHandler(this.BtnOpenImage_Click);
// btnDetect
this.btnDetect.Location = new System.Drawing.Point(130, 510);
this.btnDetect.Name = "btnDetect";
this.btnDetect.Size = new System.Drawing.Size(100, 40);
this.btnDetect.TabIndex = 3;
this.btnDetect.Text = "目标检测";
this.btnDetect.UseVisualStyleBackColor = true;
this.btnDetect.Click += new System.EventHandler(this.BtnDetect_Click);
// btnSegment
this.btnSegment.Location = new System.Drawing.Point(248, 510);
this.btnSegment.Name = "btnSegment";
this.btnSegment.Size = new System.Drawing.Size(100, 40);
this.btnSegment.TabIndex = 4;
this.btnSegment.Text = "实例分割";
this.btnSegment.UseVisualStyleBackColor = true;
this.btnSegment.Click += new System.EventHandler(this.BtnSegment_Click);
// textBox1
this.textBox1.Location = new System.Drawing.Point(12, 560);
this.textBox1.Multiline = true;
this.textBox1.Name = "textBox1";
this.textBox1.ReadOnly = true;
this.textBox1.Size = new System.Drawing.Size(976, 80);
this.textBox1.TabIndex = 5;
// statusStrip1
this.statusStrip1.Items.AddRange(new System.Windows.Forms.ToolStripItem[] {
this.toolStripStatusLabel1,
this.toolStripStatusLabel2});
this.statusStrip1.Location = new System.Drawing.Point(0, 649);
this.statusStrip1.Name = "statusStrip1";
this.statusStrip1.Size = new System.Drawing.Size(1004, 22);
this.statusStrip1.TabIndex = 6;
this.statusStrip1.Text = "statusStrip1";
// toolStripStatusLabel1
this.toolStripStatusLabel1.Name = "toolStripStatusLabel1";
this.toolStripStatusLabel1.Size = new System.Drawing.Size(120, 17);
this.toolStripStatusLabel1.Text = "检测模型: 未加载";
// toolStripStatusLabel2
this.toolStripStatusLabel2.Name = "toolStripStatusLabel2";
this.toolStripStatusLabel2.Size = new System.Drawing.Size(120, 17);
this.toolStripStatusLabel2.Text = "分割模型: 未加载";
// Form1
this.AutoScaleDimensions = new System.Drawing.SizeF(7F, 17F);
this.AutoScaleMode = System.Windows.Forms.AutoScaleMode.Font;
this.ClientSize = new System.Drawing.Size(1004, 671);
this.Controls.Add(this.statusStrip1);
this.Controls.Add(this.textBox1);
this.Controls.Add(this.btnSegment);
this.Controls.Add(this.btnDetect);
this.Controls.Add(this.btnOpenImage);
this.Controls.Add(this.pictureBox2);
this.Controls.Add(this.pictureBox1);
this.Name = "Form1";
this.Text = "RF-DETR TensorRT 演示";
((System.ComponentModel.ISupportInitialize)(this.pictureBox1)).EndInit();
((System.ComponentModel.ISupportInitialize)(this.pictureBox2)).EndInit();
this.statusStrip1.ResumeLayout(false);
this.statusStrip1.PerformLayout();
this.ResumeLayout(false);
this.PerformLayout();
}
private System.Windows.Forms.PictureBox pictureBox1;
private System.Windows.Forms.PictureBox pictureBox2;
private System.Windows.Forms.Button btnOpenImage;
private System.Windows.Forms.Button btnDetect;
private System.Windows.Forms.Button btnSegment;
private System.Windows.Forms.TextBox textBox1;
private System.Windows.Forms.StatusStrip statusStrip1;
private System.Windows.Forms.ToolStripStatusLabel toolStripStatusLabel1;
private System.Windows.Forms.ToolStripStatusLabel toolStripStatusLabel2;
}
}RfDetrModelTensorRt.cs
cs
using OpenCvSharp;
using JYPPX.TensorRtSharp.Cuda;
using JYPPX.TensorRtSharp.Nvinfer;
using System;
using System.Collections.Generic;
using System.IO;
using System.Linq;
using System.Runtime.InteropServices;
using System.Diagnostics;
using Size = OpenCvSharp.Size;
namespace RFDETRDetector.TensorRT
{
/// <summary>
/// RF-DETR 目标检测模型 (TensorRT 后端)
/// </summary>
public class RfDetrModelTensorRt : IDisposable
{
private Runtime _runtime;
private CudaEngine _engine;
private JYPPX.TensorRtSharp.Nvinfer.ExecutionContext _context;
private CudaStream _stream;
private Cuda1DMemory<float> _inputMemory;
private Cuda1DMemory<float> _outputDetsMemory;
private Cuda1DMemory<float> _outputLabelsMemory;
private readonly int _inputWidth;
private readonly int _inputHeight;
private readonly int _maxDetections;
private readonly int _numClasses;
private readonly List<string> _classes;
// 预处理参数(与 ONNX 版一致)
private readonly Scalar _mean = new Scalar(0.485f, 0.456f, 0.406f);
private readonly Scalar _std = new Scalar(0.229f, 0.224f, 0.225f);
public class DetectionResult
{
public Rect BoundingBox { get; set; }
public string Label { get; set; }
public float Confidence { get; set; }
public int ClassId { get; set; }
}
/// <summary>
/// 加载 TensorRT 引擎
/// </summary>
/// <param name="enginePath">.engine 文件路径</param>
/// <param name="classesPath">类别文件路径</param>
public RfDetrModelTensorRt(string enginePath, string classesPath)
{
if (!File.Exists(enginePath))
throw new FileNotFoundException($"Engine 文件不存在: {enginePath}");
if (!File.Exists(classesPath))
throw new FileNotFoundException($"类别文件不存在: {classesPath}");
// 1. 读取 engine 二进制
byte[] engineData = File.ReadAllBytes(enginePath);
// 2. 初始化 Runtime 并反序列化引擎
_runtime = new Runtime();
_engine = _runtime.deserializeCudaEngineByBlob(engineData, (ulong)engineData.Length);
// 3. 创建执行上下文和 CUDA 流
_context = _engine.createExecutionContext(TrtExecutionContextAllocationStrategy.kSTATIC);
_stream = new CudaStream();
// 4. 获取输入输出维度信息
// 输入名称假设为 "pixel_values" (RF-DETR 常用),可根据实际修改
string inputName = "input";
string detsName = "dets";
string labelsName = "labels";
var inputShape = _context.getTensorShape(inputName);
_inputHeight = (int)inputShape.d[2];
_inputWidth = (int)inputShape.d[3];
var detsShape = _context.getTensorShape(detsName);
_maxDetections = (int)detsShape.d[1];
var labelsShape = _context.getTensorShape(labelsName);
_numClasses = (int)labelsShape.d[2];
// 5. 分配 GPU 显存
ulong inputSize = (ulong)(1 * 3 * _inputHeight * _inputWidth);
ulong detsSize = 1 * (ulong)_maxDetections * 4; // [1, maxDet, 4]
ulong labelsSize = 1 * (ulong)_maxDetections * (ulong)_numClasses;
_inputMemory = new Cuda1DMemory<float>(inputSize);
_outputDetsMemory = new Cuda1DMemory<float>(detsSize);
_outputLabelsMemory = new Cuda1DMemory<float>(labelsSize);
// 6. 绑定输入输出地址
_context.setInputTensorAddress(inputName, _inputMemory.get());
_context.setOutputTensorAddress(detsName, _outputDetsMemory.get());
_context.setOutputTensorAddress(labelsName, _outputLabelsMemory.get());
// 7. 加载类别名称
_classes = File.ReadAllLines(classesPath).Select(l => l.Trim()).ToList();
Console.WriteLine($"RF-DETR TensorRT 模型加载成功 | 输入: {_inputWidth}x{_inputHeight} | 检测数: {_maxDetections} | 类别数: {_numClasses}");
}
/// <summary>
/// 执行推理
/// </summary>
public List<DetectionResult> Predict(Mat image, float confidenceThreshold = 0.5f)
{
if (image == null || image.Empty())
throw new ArgumentException("输入图像无效");
int origW = image.Width;
int origH = image.Height;
// 1. 预处理
float[] inputData = Preprocess(image);
// 2. 异步拷贝到 GPU 并推理
_inputMemory.copyFromHostAsync(inputData, _stream);
_context.executeV3(_stream);
_stream.Synchronize();
// 3. 拷贝结果回主机
float[] detsData = new float[_maxDetections * 4];
float[] labelsData = new float[_maxDetections * _numClasses];
_outputDetsMemory.copyToHostAsync(detsData, _stream);
_outputLabelsMemory.copyToHostAsync(labelsData, _stream);
_stream.Synchronize();
// 4. 后处理
return ParseOutputs(detsData, labelsData, confidenceThreshold, origW, origH);
}
private float[] Preprocess(Mat image)
{
// 直接 Resize + BGR->RGB + 归一化 (ImageNet)
Mat resized = new Mat();
Cv2.Resize(image, resized, new Size(_inputWidth, _inputHeight));
Mat rgb = new Mat();
Cv2.CvtColor(resized, rgb, ColorConversionCodes.BGR2RGB);
resized.Dispose();
Mat normalized = new Mat();
rgb.ConvertTo(normalized, MatType.CV_32FC3, 1.0 / 255.0);
rgb.Dispose();
Cv2.Subtract(normalized, _mean, normalized);
Cv2.Divide(normalized, _std, normalized);
// HWC -> CHW
float[] result = new float[3 * _inputHeight * _inputWidth];
unsafe
{
float* ptr = (float*)normalized.DataPointer;
int channelSize = _inputHeight * _inputWidth;
for (int h = 0; h < _inputHeight; h++)
{
for (int w = 0; w < _inputWidth; w++)
{
for (int c = 0; c < 3; c++)
{
result[c * channelSize + h * _inputWidth + w] = ptr[h * _inputWidth * 3 + w * 3 + c];
}
}
}
}
normalized.Dispose();
return result;
}
private List<DetectionResult> ParseOutputs(float[] detsData, float[] labelsData,
float confidenceThreshold, int origW, int origH)
{
var results = new List<DetectionResult>();
float imgW = origW;
float imgH = origH;
for (int i = 0; i < _maxDetections; i++)
{
float cx = detsData[i * 4];
float cy = detsData[i * 4 + 1];
float w = detsData[i * 4 + 2];
float h = detsData[i * 4 + 3];
if (w <= 0 || h <= 0) continue;
float x1 = cx - w / 2;
float y1 = cy - h / 2;
float x2 = cx + w / 2;
float y2 = cy + h / 2;
// 类别置信度
float maxConf = 0;
int bestClass = -1;
for (int c = 0; c < _numClasses; c++)
{
float score = Sigmoid(labelsData[i * _numClasses + c]);
if (score > maxConf)
{
maxConf = score;
bestClass = c;
}
}
if (maxConf < confidenceThreshold) continue;
int px1 = (int)(x1 * imgW);
int py1 = (int)(y1 * imgH);
int px2 = (int)(x2 * imgW);
int py2 = (int)(y2 * imgH);
px1 = Math.Clamp(px1, 0, origW);
py1 = Math.Clamp(py1, 0, origH);
px2 = Math.Clamp(px2, 0, origW);
py2 = Math.Clamp(py2, 0, origH);
if (px2 <= px1 || py2 <= py1) continue;
int mappedId = (bestClass - 1) > 0 ? (bestClass - 1) : 0;
string label = mappedId < _classes.Count ? _classes[mappedId] : $"class_{bestClass}";
results.Add(new DetectionResult
{
BoundingBox = new Rect(px1, py1, px2 - px1, py2 - py1),
Label = label,
Confidence = maxConf,
ClassId = mappedId
});
}
return results.OrderByDescending(r => r.Confidence).ToList();
}
private static float Sigmoid(float x) => 1.0f / (1.0f + MathF.Exp(-x));
public void Dispose()
{
_inputMemory?.Dispose();
_outputDetsMemory?.Dispose();
_outputLabelsMemory?.Dispose();
_stream?.Dispose();
_context?.Dispose();
_engine?.Dispose();
_runtime?.Dispose();
}
}
}RFDETRSEGTensorRt.cs
cs
using OpenCvSharp;
using JYPPX.TensorRtSharp.Cuda;
using JYPPX.TensorRtSharp.Nvinfer;
using System;
using System.Collections.Generic;
using System.IO;
using System.Linq;
using System.Runtime.InteropServices;
using Size = OpenCvSharp.Size;
namespace RFDETRSegmentor.TensorRT
{
public class RFDETRSEGTensorRt : IDisposable
{
private Runtime _runtime;
private CudaEngine _engine;
private JYPPX.TensorRtSharp.Nvinfer.ExecutionContext _context;
private CudaStream _stream;
private Cuda1DMemory<float> _inputMemory;
private Cuda1DMemory<float> _outputDetsMemory;
private Cuda1DMemory<float> _outputLabelsMemory;
private Cuda1DMemory<float> _outputMasksMemory;
private readonly int _inputWidth;
private readonly int _inputHeight;
private readonly int _numQueries;
private readonly int _numClasses;
private readonly int _maskSize;
private readonly List<string> _userClasses;
private readonly bool _hasBackground;
private readonly Scalar _mean = new Scalar(0.485f, 0.456f, 0.406f);
private readonly Scalar _std = new Scalar(0.229f, 0.224f, 0.225f);
public class SegmentationResult
{
public Rect BoundingBox { get; set; }
public int ClassId { get; set; }
public string Label { get; set; }
public float Confidence { get; set; }
public Mat Mask { get; set; }
}
/// <summary>
/// 加载 TensorRT 分割模型
/// </summary>
/// <param name="enginePath">.engine 文件路径</param>
/// <param name="classesPath">类别文件(不含背景)</param>
public RFDETRSEGTensorRt(string enginePath, string classesPath)
{
if (!File.Exists(enginePath))
throw new FileNotFoundException($"Engine 文件不存在: {enginePath}");
if (!File.Exists(classesPath))
throw new FileNotFoundException($"类别文件不存在: {classesPath}");
byte[] engineData = File.ReadAllBytes(enginePath);
_runtime = new Runtime();
_engine = _runtime.deserializeCudaEngineByBlob(engineData, (ulong)engineData.Length);
_context = _engine.createExecutionContext(TrtExecutionContextAllocationStrategy.kSTATIC);
_stream = new CudaStream();
// 输入输出张量名称(根据实际模型修改)
string inputName = "input";
string detsName = "dets";
string labelsName = "labels";
string masksName = "masks";
var inputShape = _context.getTensorShape(inputName);
_inputHeight = (int)inputShape.d[2];
_inputWidth = (int)inputShape.d[3];
var detsShape = _context.getTensorShape(detsName);
_numQueries = (int)detsShape.d[1];
var labelsShape = _context.getTensorShape(labelsName);
_numClasses = (int)labelsShape.d[2];
var masksShape = _context.getTensorShape(masksName);
_maskSize = (int)masksShape.d[2];
// 分配显存
ulong inputSize = (ulong)(1 * 3 * _inputHeight * _inputWidth);
ulong detsSize = 1 * (ulong)_numQueries * 4;
ulong labelsSize = 1 * (ulong)_numQueries * (ulong)_numClasses;
ulong masksSize = 1 * (ulong)_numQueries * (ulong)_maskSize * (ulong)_maskSize;
_inputMemory = new Cuda1DMemory<float>(inputSize);
_outputDetsMemory = new Cuda1DMemory<float>(detsSize);
_outputLabelsMemory = new Cuda1DMemory<float>(labelsSize);
_outputMasksMemory = new Cuda1DMemory<float>(masksSize);
_context.setInputTensorAddress(inputName, _inputMemory.get());
_context.setOutputTensorAddress(detsName, _outputDetsMemory.get());
_context.setOutputTensorAddress(labelsName, _outputLabelsMemory.get());
_context.setOutputTensorAddress(masksName, _outputMasksMemory.get());
_userClasses = File.ReadAllLines(classesPath).Where(l => !string.IsNullOrWhiteSpace(l)).Select(l => l.Trim()).ToList();
_hasBackground = (_numClasses == _userClasses.Count + 1);
Console.WriteLine($"分割模型加载成功 | 输入: {_inputWidth}x{_inputHeight} | Queries: {_numQueries} | 类别: {_numClasses} | 掩码: {_maskSize}x{_maskSize}");
}
public List<SegmentationResult> Predict(Mat image, float confidenceThreshold = 0.5f, float maskThreshold = 0.3f)
{
if (image == null || image.Empty())
throw new ArgumentException("输入图像无效");
int origW = image.Width, origH = image.Height;
float[] inputData = Preprocess(image);
_inputMemory.copyFromHostAsync(inputData, _stream);
_context.executeV3(_stream);
_stream.Synchronize();
float[] dets = new float[_numQueries * 4];
float[] labels = new float[_numQueries * _numClasses];
float[] masks = new float[_numQueries * _maskSize * _maskSize];
_outputDetsMemory.copyToHostAsync(dets, _stream);
_outputLabelsMemory.copyToHostAsync(labels, _stream);
_outputMasksMemory.copyToHostAsync(masks, _stream);
_stream.Synchronize();
return Postprocess(origW, origH, dets, labels, masks, confidenceThreshold, maskThreshold);
}
private float[] Preprocess(Mat image)
{
Mat resized = new Mat();
Cv2.Resize(image, resized, new Size(_inputWidth, _inputHeight));
Mat rgb = new Mat();
Cv2.CvtColor(resized, rgb, ColorConversionCodes.BGR2RGB);
resized.Dispose();
Mat normalized = new Mat();
rgb.ConvertTo(normalized, MatType.CV_32FC3, 1.0 / 255.0);
rgb.Dispose();
Cv2.Subtract(normalized, _mean, normalized);
Cv2.Divide(normalized, _std, normalized);
float[] result = new float[3 * _inputHeight * _inputWidth];
unsafe
{
float* ptr = (float*)normalized.DataPointer;
int channelSize = _inputHeight * _inputWidth;
for (int h = 0; h < _inputHeight; h++)
for (int w = 0; w < _inputWidth; w++)
for (int c = 0; c < 3; c++)
result[c * channelSize + h * _inputWidth + w] = ptr[h * _inputWidth * 3 + w * 3 + c];
}
normalized.Dispose();
return result;
}
private List<SegmentationResult> Postprocess(int imgW, int imgH, float[] dets, float[] labels, float[] masks,
float confThresh, float maskThresh)
{
float scaleX = (float)imgW / _inputWidth;
float scaleY = (float)imgH / _inputHeight;
var candidates = new List<(int idx, float score, int classId, float cx, float cy, float w, float h)>();
for (int i = 0; i < _numQueries; i++)
{
float maxScore = 0;
int bestClass = -1;
for (int c = 0; c < _numClasses; c++)
{
float s = Sigmoid(labels[i * _numClasses + c]);
if (s > maxScore) { maxScore = s; bestClass = c; }
}
if (maxScore < confThresh) continue;
if (_hasBackground && bestClass == 0) continue;
if (bestClass >= _userClasses.Count) continue;
float cx = dets[i * 4];
float cy = dets[i * 4 + 1];
float w = dets[i * 4 + 2];
float h = dets[i * 4 + 3];
if (w <= 0.001f || h <= 0.001f) continue;
candidates.Add((i, maxScore, bestClass, cx, cy, w, h));
}
var results = new List<SegmentationResult>();
foreach (var (idx, score, classId, cx, cy, w, h) in candidates)
{
float absCx = cx * _inputWidth;
float absCy = cy * _inputHeight;
float absW = w * _inputWidth;
float absH = h * _inputHeight;
float x1 = absCx - absW / 2;
float y1 = absCy - absH / 2;
float x2 = absCx + absW / 2;
float y2 = absCy + absH / 2;
float origX1 = x1 * scaleX;
float origY1 = y1 * scaleY;
float origX2 = x2 * scaleX;
float origY2 = y2 * scaleY;
int rx1 = Math.Clamp((int)origX1, 0, imgW);
int ry1 = Math.Clamp((int)origY1, 0, imgH);
int rx2 = Math.Clamp((int)origX2, 0, imgW);
int ry2 = Math.Clamp((int)origY2, 0, imgH);
if (rx2 <= rx1 || ry2 <= ry1) continue;
Rect box = new Rect(rx1, ry1, rx2 - rx1, ry2 - ry1);
// 处理掩码
float[] maskSigmoid = new float[_maskSize * _maskSize];
int offset = idx * _maskSize * _maskSize;
for (int i = 0; i < maskSigmoid.Length; i++)
maskSigmoid[i] = Sigmoid(masks[offset + i]);
using (Mat rawMask = Mat.FromPixelData(_maskSize, _maskSize, MatType.CV_32FC1, maskSigmoid))
using (Mat maskResized = new Mat())
{
Cv2.Resize(rawMask, maskResized, new Size(imgW, imgH));
Mat binary = new Mat();
Cv2.Threshold(maskResized, binary, maskThresh, 255, ThresholdTypes.Binary);
binary.ConvertTo(binary, MatType.CV_8UC1);
results.Add(new SegmentationResult
{
BoundingBox = box,
ClassId = classId-1,
Label = _userClasses[classId-1],
Confidence = score,
Mask = binary
});
}
}
return results.OrderByDescending(r => r.Confidence).ToList();
}
private static float Sigmoid(float x) => 1.0f / (1.0f + MathF.Exp(-x));
public void Dispose()
{
_inputMemory?.Dispose();
_outputDetsMemory?.Dispose();
_outputLabelsMemory?.Dispose();
_outputMasksMemory?.Dispose();
_stream?.Dispose();
_context?.Dispose();
_engine?.Dispose();
_runtime?.Dispose();
}
}
}ONNX→TensorRT转换脚本(cmd)
trtexec.exe --onnx=inference_model.sim-nano-seg.onnx --saveEngine=rfdetr_det.engine --fp16
pause
trtexec.exe --onnx=inference_model.sim-nano.onnx --saveEngine=rfdetr_seg.engine --fp16
pause
Engine输入输出信息查看脚本(cmd)
cd D:\TensorRT10.0\TensorRT-10.13.0.35\lib
trtexec.exe --loadEngine=rfdetr_det.engine --dumpLayerInfo --exportLayerInfo=layer_info.json
pause
GPU频率锁定脚本(cmd)
nvidia-smi -lgc 5001
pause
TensorRTSharp相关技术文档:https://mp.weixin.qq.com/s/D0c6j5MmraJO4Eza7tWm1A