高效的路径规划对于无人机(UAV)在可变的三维环境中执行复杂且紧急的任务至关重要。然而,传统的路径规划方法无法充分解决旋转运动与平移运动之间的耦合问题,并且欧拉角表示存在万向节锁奇异性问题。本文提出了一种基于双四元数的无人机三维路径规划新方法。通过使用单位双四元数表示无人机的姿态,建立了新的路径规划双四元数优化模型(PPDQOM),并将其转化为无约束的路径规划运动优化模型(PPMOM),有效消除了由两阶段优化引起的误差累积。此外,提出了带有双向搜索的粒子群优化(BiSPSO)算法,通过有效平衡全局探索与局部开发能力,提高了所提模型的求解效率。
采用起始-终点连接,各占种群规模的三分之一。
A 引入策略
随机初始化:在搜索空间内随机生成路径点,并按顺序连接形成无人机的飞行路径。
线性插值初始化:
xi(0)=(1−τ)⋅x(1)+τ⋅x(N),(32)x_i(0) = (1 - \tau) \cdot x^{(1)} + \tau \cdot x^{(N)}, \tag{32}xi(0)=(1−τ)⋅x(1)+τ⋅x(N),(32)
其中xi(0)x_i(0)xi(0)表示第iii个粒子的初始位置,权重参数τ=i−1Np−1\tau = \frac{i-1}{N_p-1}τ=Np−1i−1。
贝塞尔曲线插值初始化:
xi(0)=(1−τ)2⋅x(1)+2(1−τ)τ⋅xcontrol+τ2⋅x(N),(33)x_i(0) = (1 - \tau)^2 \cdot x^{(1)} + 2(1 - \tau)\tau \cdot x_{\text{control}} + \tau^2 \cdot x^{(N)}, \tag{33}xi(0)=(1−τ)2⋅x(1)+2(1−τ)τ⋅xcontrol+τ2⋅x(N),(33)
xcontrol=x(1)+0.5⋅(x(N)−x(1))+0.5⋅(γ−0.5),(34)x_{\text{control}} = x^{(1)} + 0.5 \cdot (x^{(N)} - x^{(1)}) + 0.5 \cdot (\gamma - 0.5), \tag{34}xcontrol=x(1)+0.5⋅(x(N)−x(1))+0.5⋅(γ−0.5),(34)
其中xcontrolx_{\text{control}}xcontrol表示控制点的位置,γ\gammaγ是0,10, 10,1范围内的随机数。
三种初始化方法相结合生成初始无人机路径,增强了种群多样性。后两种方法融入了无人机路径规划问题的先验知识,有助于后续迭代找到更优解,并提高优化效率。
自适应参数调整机制。 一个优秀的优化器应在早期注重全局探索,在后期注重局部开发47,48。为此,我们在标准PSO算法中引入自适应参数调整机制,以平衡算法的探索和开发能力。
PSO算法的惯性权重www、认知项c1c_1c1和社会项c2c_2c2是固定的。我们采用以下自适应方法来调整这些参数:
wadaptive=w(1+0.5×fi−fbestfworst−fbest+10−10),(35)w_{\text{adaptive}} = w \left( 1 + 0.5 \times \frac{f_i - f_{\text{best}}}{f_{\text{worst}} - f_{\text{best}} + 10^{-10}} \right), \tag{35}wadaptive=w(1+0.5×fworst−fbest+10−10fi−fbest),(35)
w=wmax−(wmax−wmin)iterTiter,(36)w = w_{\text{max}} - (w_{\text{max}} - w_{\text{min}}) \frac{\text{iter}}{T_{\text{iter}}}, \tag{36}w=wmax−(wmax−wmin)Titeriter,(36)
c1,adaptive=c1,initial−(c1,initial−c1,final)iterTiter,(37)c_{1,\text{adaptive}} = c_{1,\text{initial}} - (c_{1,\text{initial}} - c_{1,\text{final}}) \frac{\text{iter}}{T_{\text{iter}}}, \tag{37}c1,adaptive=c1,initial−(c1,initial−c1,final)Titeriter,(37)
c2,adaptive=c2,initial+(c2,final−c2,initial)iterTiter,(38)c_{2,\text{adaptive}} = c_{2,\text{initial}} + (c_{2,\text{final}} - c_{2,\text{initial}}) \frac{\text{iter}}{T_{\text{iter}}}, \tag{38}c2,adaptive=c2,initial+(c2,final−c2,initial)Titeriter,(38)
其中wadaptivew_{\text{adaptive}}wadaptive、c1,adaptivec_{1,\text{adaptive}}c1,adaptive和c2,adaptivec_{2,\text{adaptive}}c2,adaptive分别为自适应惯性权重、认知项和社会项。fif_ifi是第iii个粒子的适应度值。fbestf_{\text{best}}fbest是全局最优位置处粒子的适应度值。fworstf_{\text{worst}}fworst是全局最差位置处粒子的适应度值。wmaxw_{\text{max}}wmax和wminw_{\text{min}}wmin分别是wadaptivew_{\text{adaptive}}wadaptive的上限和下限。c1,initialc_{1,\text{initial}}c1,initial和c1,finalc_{1,\text{final}}c1,final分别是c1,adaptivec_{1,\text{adaptive}}c1,adaptive的初始值和最终值。c2,initialc_{2,\text{initial}}c2,initial和c2,finalc_{2,\text{final}}c2,final分别是c2,adaptivec_{2,\text{adaptive}}c2,adaptive的初始值和最终值。
我们将粒子速度更新公式中原始的惯性权重www、认知项c1c_1c1和社会项c2c_2c2替换为自适应惯性权重wadaptivew_{\text{adaptive}}wadaptive、认知项c1,adaptivec_{1,\text{adaptive}}c1,adaptive和社会项c2,adaptivec_{2,\text{adaptive}}c2,adaptive。这些参数根据粒子的适应度动态调整,使得较优粒子更专注于开发过程,而较劣粒子更关注探索过程。
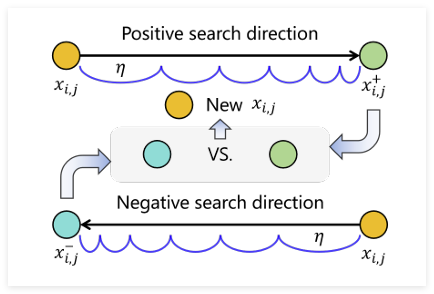
增强搜索策略。 PSO算法在后期容易陷入局部最优,导致搜索精度不足49。在后面的迭代中,局部搜索可以有效地利用剩余的计算资源并避免无效勘探50。增强算法的局部开发能力和求解精度,我们引了双向搜索策略来改进算法的局部搜索如图4所示矩形搜索策略在前向和前向执行搜索通过自适应地减少局部搜索步骤来反转方向大小η,从而获得位于不同的两个个体地区。具有良好体能的个人将担任下一代个人的下一次迭代。这个策略采用周期性触发机制,执行本地每20代搜索一次每个粒子。
B. 针对PPMOM提出的BiSPSO算法
通过将上述三种策略嵌入PSO算法的执行过程中,我们得到了具有更优优化性能的BiSPSO算法,并将其应用于求解PPMOM。BiSPSO算法的收敛性分析见附录B。
在求解PPMOM的过程中,每个粒子xix_ixi(i=1,2,...,Npi = 1, 2, \ldots, N_pi=1,2,...,Np)代表一条完整的无人机飞行路径,路径点x(i)∈Mx^{(i)} \in \mathbb{M}x(i)∈M(i=1,2,...,Ni = 1, 2, \ldots, Ni=1,2,...,N)是一个六维实向量。因此,该算法生成NpN_pNp条可选无人机飞行路径,并进一步评估每条路径的优劣。最终,从这些路径中选出最优路径xbestx_{\text{best}}xbest,它是一个包含6N6N6N个元素的向量(dim=6Ndim = 6Ndim=6N),其对应的目标函数值为JM(xbest)J_M(x_{\text{best}})JM(xbest)。
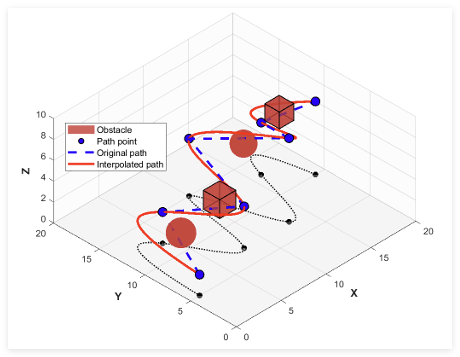
BiSPSO算法生成的轨迹是由多个线段组成的飞行路径,只有通过有效的插值方法才能获得平滑的飞行路径。我们使用三次样条插值51来连接相邻的路径点。三次多项式Si(ρ)S_i(\rho)Si(ρ)(i=1,2,...,Npi = 1, 2, \ldots, N_pi=1,2,...,Np)如下所示:
Si(ρ)=aiρ3+biρ2+ciρ+di,S_i(\rho) = a_i\rho^3 + b_i\rho^2 + c_i\rho + d_i,Si(ρ)=aiρ3+biρ2+ciρ+di,
其中ρ∈0,1\rho \in 0, 1ρ∈0,1是三次样条插值参数,表示飞行路径上某点的位置,ai,bi,cia_i, b_i, c_iai,bi,ci和did_idi是三次多项式的系数。该方法在计算三次多项式系数后将得到NpN_pNp个如式(42)所示的表达式,并利用这些表达式对相应数量的飞行路径进行平滑处理。图5显示了一条通过多次样条插值对多个路径点拟合后的飞行路径。该飞行路径在保持平滑的同时有效避开了多个障碍物。
C. BiSPSO算法在无人机路径规划中的评估
H. Xia, Y. Ke, Z. Jia, R. Liao and H. Zhang, "A Novel UAV 3D Path Planning Method Based on Dual Quaternion Motion Optimization and Applications," in IEEE Transactions on Vehicular Technology, doi: 10.1109/TVT.2026.3688498.