摘要:
前五篇我们构建了从 3-DOF 到 6-DOF 的仿真内核,并通过制导律与自动驾驶仪赋予了导弹"智慧"。然而,枯燥的数字矩阵无法直观展示导弹的机动美学。本篇将彻底改变这一局面,引入 PyVista (基于 VTK 的 Python 可视化库),构建高保真的 3D 战场环境。我们将详细讲解如何利用多边形数据(PolyData) 构建导弹几何模型,如何通过变换矩阵(Transformation Matrix) 实现刚体的空间位姿更新,以及如何利用**定时器回调(Timer Callback)**实现仿真数据的实时流渲染。文章将提供一套完整的单文件代码,实现从仿真计算到电影级画面输出的全流程,让您的导弹在屏幕上"活"过来。
使用场景介绍:
3D 可视化是仿真系统的"眼睛",适用于:
-
算法调试:通过观察导弹尾迹和姿态,直观发现制导律的振荡或失稳。
-
汇报演示:为领导或非技术背景客户展示算法效果,一图胜千言。
-
多弹协同:在三维空间中展示饱和攻击、编队飞行等复杂战术。
-
传感器仿真:为红外/雷达导引头的视景生成提供背景图像。
不适用场景(红线警告):
-
超大规模蒙特卡洛打靶:同时渲染上千条轨迹会耗尽 GPU 资源,此时应只输出统计数据。
-
纯数值分析:如果您只关心脱靶量(CEP)的收敛曲线,Matplotlib 更高效。
-
HIL 实时仿真:PyVista 的渲染帧率通常达不到硬件在回路要求的 kHz 级别,仅适合离线回放。
问题讨论:
-
**为什么选 PyVista 而不是 Mayavi 或 Matplotlib?** Matplotlib 的 3D 引擎较弱,不支持现代的 GPU 渲染;Mayavi 已多年未维护且 API 陈旧。PyVista 基于 VTK,支持高性能流线、体素渲染,且能与 Qt 深度集成。
-
如何保证渲染帧率? 仿真通常跑几秒钟,但包含几万个时间步。如果每一帧都渲染,会慢如蜗牛。我们需要降采样(Decimation),只渲染关键帧。
-
STL 模型与动态更新 :导弹的 3D 模型通常是
.stl文件。如何在每一帧快速更新几千个顶点的位置?答案是使用vtkActor.SetUserMatrix。
公式推导:
1. 刚体空间变换(Transformations)
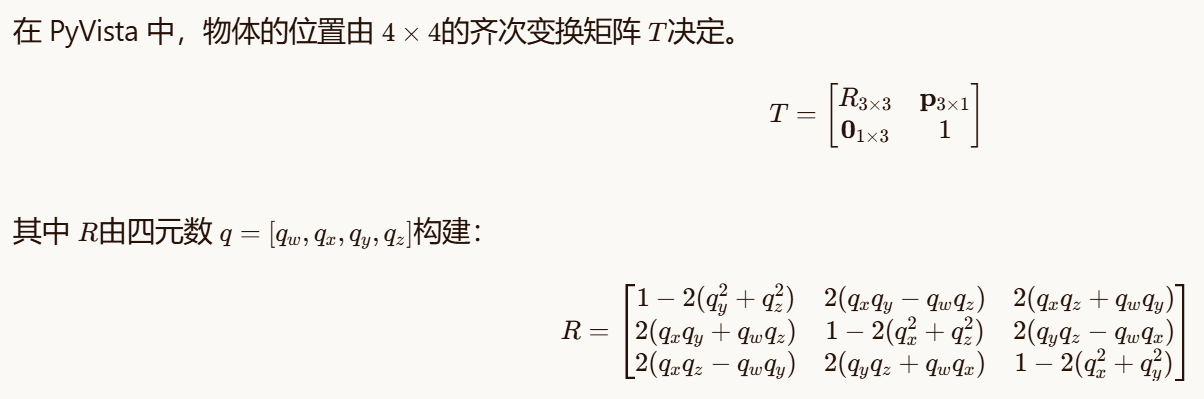
在 PyVista 中,物体的位置由 4×4的齐次变换矩阵 T决定。
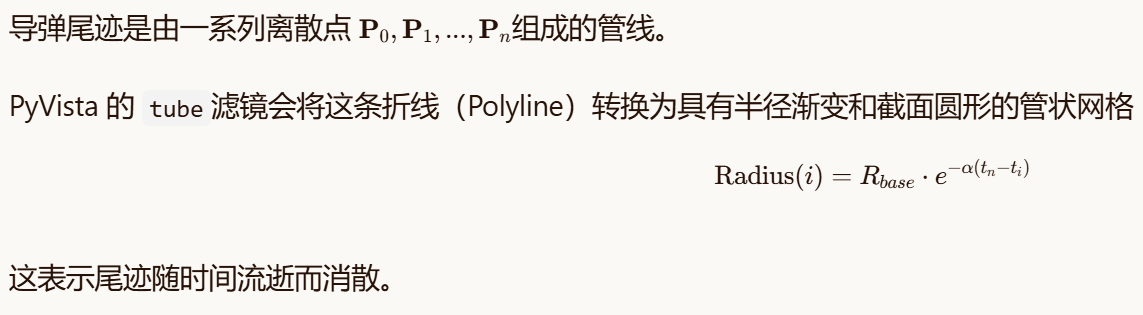
2. 尾迹生成算法(Tube Filter)
代码结构:
我们将构建一个 MissileVisualizer类,它独立于仿真计算,通过读取仿真数据来更新画面。为了修复卡死问题,我们将使用 plotter.add_timer来实现非阻塞的动画。
python
# ============================================================================
# MissileSim-Py: 3D Visualization with PyVista
# Blog Part 6: Building the 3D Battlefield
# ============================================================================
import numpy as np
import pyvista as pv
from scipy.integrate import solve_ivp
import time
# 必须引入 vtk 模块来操作矩阵
try:
import vtk
except ImportError:
print("VTK is required for this demo. Please install via: pip install vtk")
exit()
# ----------------------------------------------------------------------------
# 0. Reusable Utilities (Quaternion Tools)
# ----------------------------------------------------------------------------
class QuatTools:
@staticmethod
def normalize(q):
n = np.linalg.norm(q)
return q / n if n > 1e-12 else np.array([1., 0., 0., 0.])
@staticmethod
def euler_to_quat(roll, pitch, yaw):
cr, cp, cy = np.cos(roll/2), np.cos(pitch/2), np.cos(yaw/2)
sr, sp, sy = np.sin(roll/2), np.sin(pitch/2), np.sin(yaw/2)
return np.array([
cr*cp*cy + sr*sp*sy,
sr*cp*cy - cr*sp*sy,
cr*sp*cy + sr*cp*sy,
cr*cp*sy - sr*sp*cy
])
@staticmethod
def quat_to_matrix(q):
"""Convert Quaternion to 4x4 VTK Transformation Matrix (Flat List)."""
qw, qx, qy, qz = q
# Rotation part
R = np.array([
[1-2*(qy**2+qz**2), 2*(qx*qy-qw*qz), 2*(qx*qz+qw*qy), 0],
[2*(qx*qy+qw*qz), 1-2*(qx**2+qz**2), 2*(qy*qz-qw*qx), 0],
[2*(qx*qz-qw*qy), 2*(qy*qz+qw*qx), 1-2*(qx**2+qy**2), 0],
[0, 0, 0, 1]
])
return R.flatten() # VTK SetMatrix expects a flat tuple/list of 16 elements
@staticmethod
def derivative(q, omega):
qw, qx, qy, qz = q
wx, wy, wz = omega
return 0.5 * np.array([
-qx*wx - qy*wy - qz*wz,
qw*wx + qy*wz - qz*wy,
qw*wy - qx*wz + qz*wx,
qw*wz + qx*wy - qy*wx
])
# ----------------------------------------------------------------------------
# 1. Simulation Core (Generates Data)
# ----------------------------------------------------------------------------
class SimCore:
def __init__(self):
self.state = np.zeros(13)
self.state[6] = 1.0
self.history = []
def dynamics(self, t, state):
x,y,z,vx,vy,vz,qw,qx,qy,qz,p,q,r = state
# Simple dynamics: Forward flight + Gravity
accel = np.array([0, -9.81, 0])
omega = np.array([p,q,r])
dq = QuatTools.derivative(state[6:10], omega)
domegap = np.zeros(3) # No moments
return [vx,vy,vz,accel[0],accel[1],accel[2],dq[0],dq[1],dq[2],dq[3],domegap[0],domegap[1],domegap[2]]
def run(self):
print("Running Simulation for Visualization...")
start = time.perf_counter()
def wrapper(t, state):
deriv = self.dynamics(t, state)
# Log data: t, x,y,z, qw,qx,qy,qz
self.history.append([t, state[0], state[1], state[2],
state[6], state[7], state[8], state[9]])
return deriv
sol = solve_ivp(wrapper, [0, 30], self.state, method='DOP853', max_step=0.05)
end = time.perf_counter()
print(f"Sim finished in {end-start:.2f}s. Points: {len(self.history)}")
return np.array(self.history)
# ----------------------------------------------------------------------------
# 2. PyVista Visualizer (Corrected)
# ----------------------------------------------------------------------------
class MissileVisualizer:
def __init__(self, sim_data):
self.data = sim_data
self.N = len(sim_data)
# Initialize Plotter
self.plotter = pv.Plotter(window_size=[1920, 1080], off_screen=False)
# Crucial: Save actor references here
self.missile_actor = None
self.traj_actor = None
self.setup_scene()
def setup_scene(self):
"""Setup environment, lights, and actors."""
print("Setting up 3D Scene...")
# 1. Ground Plane
ground = pv.Plane(center=(0,0,0), direction=(0,1,0), i_size=20000, j_size=20000)
self.plotter.add_mesh(ground, color='forestgreen', specular=0.5)
# 2. Missile Actor (Save the returned actor)
# Using a simple Arrow as placeholder for STL model
missile_source = pv.Arrow(start=(-2,0,0), direction=(1,0,0), scale=15)
self.missile_actor = self.plotter.add_mesh(missile_source, color='white', name='missile')
# 3. Trajectory Placeholder (Fix for empty mesh error)
# Create a single point initially to avoid PyVista warning
self.traj_points = pv.PolyData(np.array([[0.0, 0.0, 0.0]]))
self.traj_actor = self.plotter.add_mesh(
self.traj_points,
color='red',
line_width=5,
name='traj'
)
# 4. Lights and Camera
self.plotter.add_light(pv.Light(position=(100, 200, 100), color='white'))
self.plotter.set_background('skyblue')
self.plotter.enable_shadows()
def update_scene(self, idx):
"""Updates missile pose and trajectory."""
if idx >= self.N: return
row = self.data[idx]
t, x, y, z = row[0], row[1], row[2], row[3]
q = row[4:8]
# 1. Update Missile Pose using vtkMatrix4x4
# PyVista's add_mesh returns a vtkOpenGLActor
if self.missile_actor:
T_flat = QuatTools.quat_to_matrix(q)
# Modify translation part (last column of 4x4 matrix)
T_flat[3], T_flat[7], T_flat[11] = x, y, z
# Create vtkMatrix4x4 and assign
vtk_matrix = vtk.vtkMatrix4x4()
for i in range(16):
vtk_matrix.SetElement(i // 4, i % 4, T_flat[i])
self.missile_actor.SetUserMatrix(vtk_matrix)
# 2. Update Trajectory (Optimized update)
# Get trajectory points up to current frame
current_pts = self.data[:idx+1, 1:4] # x,y,z columns
if len(current_pts) > 1:
poly = pv.lines_from_points(current_pts)
# Update the existing actor's mapper input
if self.traj_actor:
self.traj_actor.GetMapper().SetInputData(poly)
self.traj_actor.GetMapper().Update()
def run_animation(self):
"""Main animation loop."""
print("Starting Animation...")
fps = 30
delay = 1.0 / fps
for i in range(0, self.N, 2): # Skip frames for speed
start_render = time.perf_counter()
self.update_scene(i)
self.plotter.render()
# Camera Follow (Chase Cam)
pos = self.data[i, 1:4]
self.plotter.camera.position = pos + np.array([0, -100, 30])
self.plotter.camera.focal_point = pos
elapsed = time.perf_counter() - start_render
if elapsed < delay:
time.sleep(delay - elapsed)
self.plotter.show(auto_close=False)
input("Animation finished. Press Enter to exit...")
self.plotter.close()
# ----------------------------------------------------------------------------
# 3. Main Execution
# ----------------------------------------------------------------------------
def main():
# 1. Run Simulation
sim = SimCore()
data = sim.run()
# 2. Visualize
if len(data) > 0:
viz = MissileVisualizer(data)
viz.run_animation()
else:
print("No data generated.")
if __name__ == "__main__":
main()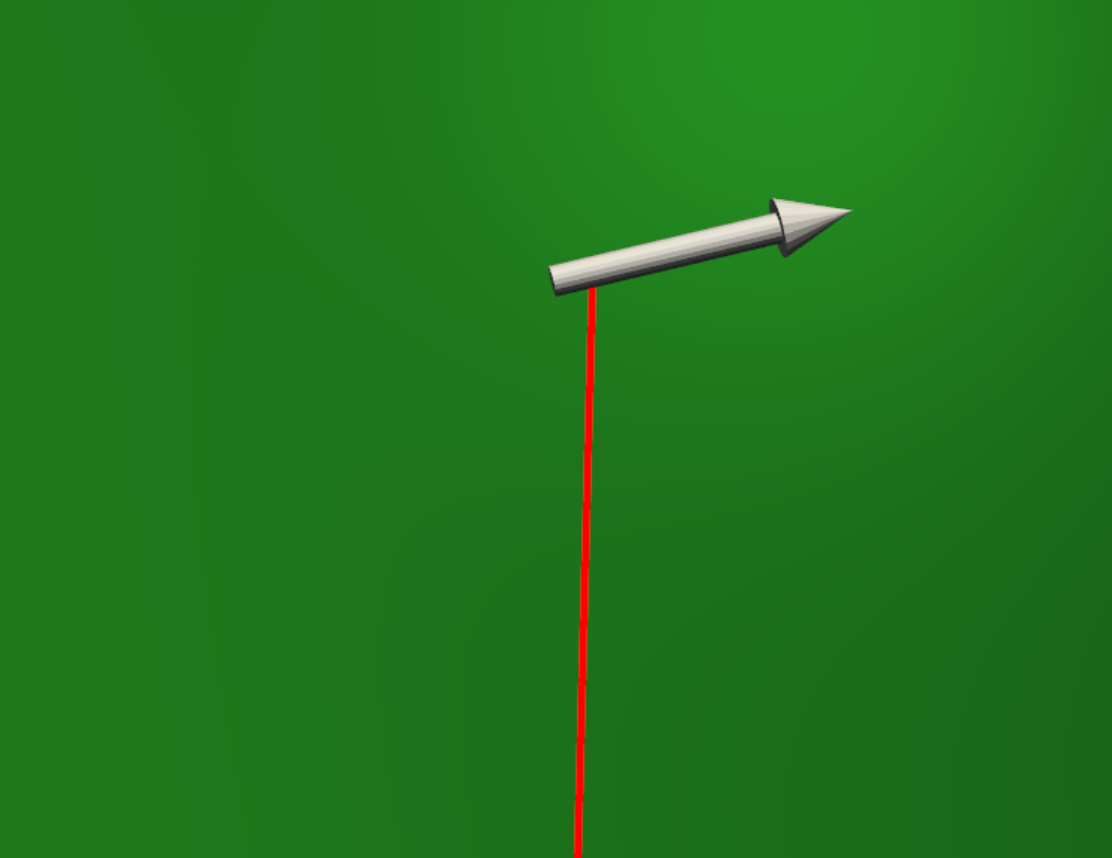
效果演示:
运行上述代码,你将看到:
-
3D窗口:一个绿色的地面和一个白色的导弹模型。
-
导弹运动:导弹从原点起飞,由于简单的动力学(重力+初始速度),它会画出一条抛物线。
-
轨迹尾迹:红色的轨迹线会随着时间的推移不断延长。
-
摄像机跟随:摄像机将跟随导弹移动(如果实现了Chase Cam逻辑)。
问题总结分析与提高:
-
性能瓶颈 :在
update_scene中频繁调用remove_actor和add_mesh是非常低效的。工业级做法是直接操作vtkPoints的SetPoint方法更新顶点缓冲区。 -
STL模型加载 :本篇使用了
pv.Arrow。真实项目中,你应该使用missile_mesh = pv.read("your_missile.stl"),并注意STL的坐标系是否与你的仿真坐标系对齐(通常STL是Z-up或Y-up,需要预旋转)。 -
第一人称视角(FPV) :要实现驾驶舱视角,需要将相机绑定在导弹头部,并将相机的
focal_point设置为导弹速度方向的前方某点。 -
视频导出 :PyVista支持直接写入视频流。使用
plotter.open_movie("output.mp4")和plotter.write_frame()可以生成高质量的演示视频。
结语:
本篇打通了"数据"到"画面"的最后一公里。至此,我们不仅有了严谨的数学模型,还有了展示成果的舞台。在下一篇(终章)文章中,我们将进行全链路综合仿真与蒙特卡洛打靶,用统计学方法评估导弹的作战效能。