目录
1.摘要
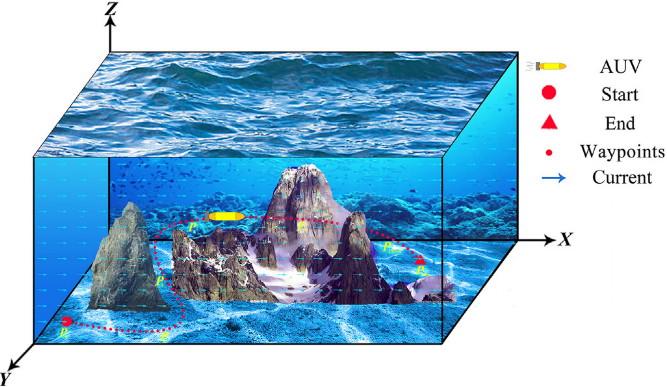
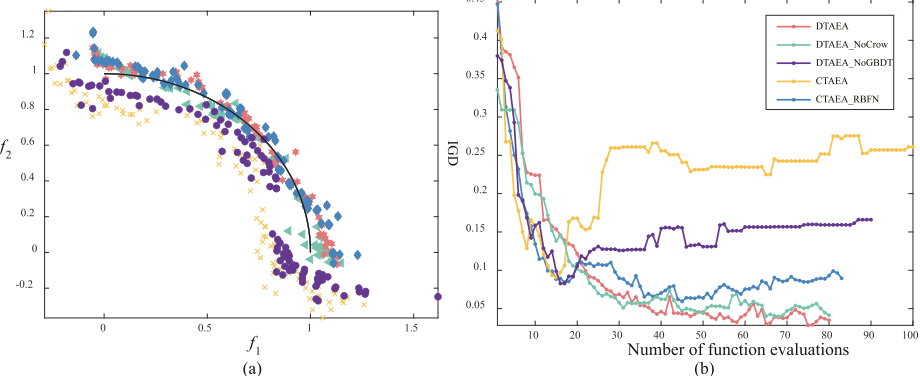
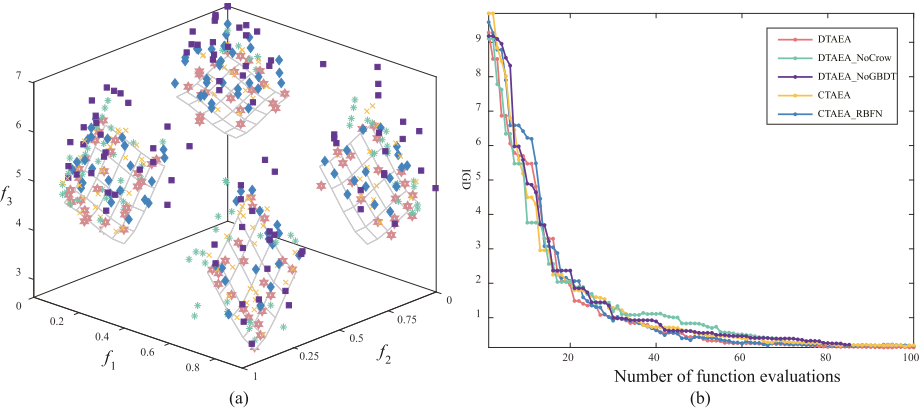
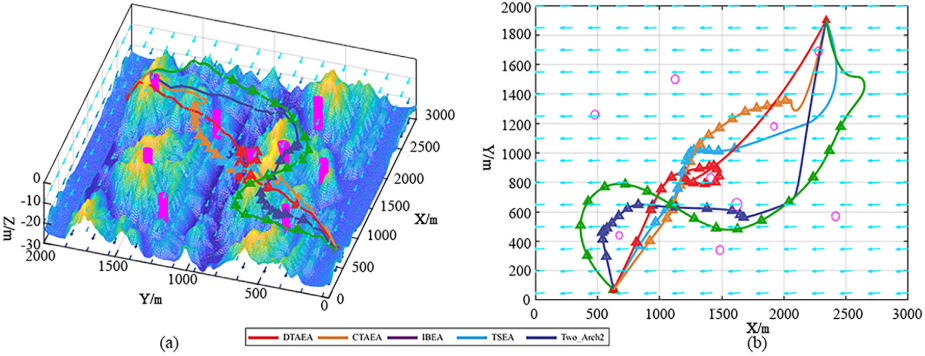
针对噪声多目标优化问题,本文提出一种集成去噪机制双存档进化算法(DTAEA),构建基于梯度提升决策树(GBDT)去噪网络,通过在线学习动态更新网络参数,实现预测目标值的自适应降噪;同时引入决策与目标双空间拥挤度指标,协同评估个体分布,以提升复杂Pareto前沿上的种群多样性与均匀性。在DTLZ基准测试集及真实海流干扰下的3D自主水下航行器(AUV)路径规划实验中,DTAEA在优化质量、路径长度缩减及超体积鲁棒性指标上均表现出显著优势。
2.背景知识
梯度提升决策树GBDT
GBDT通过串行累加决策树以梯度下降方式最小化损失函数,其最终模型表示为:
F T ( x ) = ∑ t = 1 T ∑ j = 1 J c j t I ( x ∈ R t , j ) F_T(x) = \sum_{t=1}^{T} \sum_{j=1}^{J} c_j^t I(x \in R_{t,j}) FT(x)=t=1∑Tj=1∑JcjtI(x∈Rt,j)
算法首先初始化模型 F 0 ( x , w ) = arg min L ( y i , c ) F_0(x, w) = \arg\min L(y_i, c) F0(x,w)=argminL(yi,c),随后在每次迭代中计算损失函数的负梯度作为残差近似值:
r t , i = − ∂ L ( F t ( x i ) , y ) ∂ F t ( x i ) r_{t,i} = -\left \\frac{\\partial L(F_t(x_i), y)}{\\partial F_t(x_i)} \\right rt,i=−∂Ft(xi)∂L(Ft(xi),y)
据此计算叶节点最优拟合值 c t , j = arg min L ( y i , F t − 1 + c ) c_{t,j} = \arg\min L(y_i, F_{t-1} + c) ct,j=argminL(yi,Ft−1+c) 并更新模型。优化过程中,该模型通过在线迭代动态更新,从而实现目标空间的自适应去噪。
3.DTAEA算法
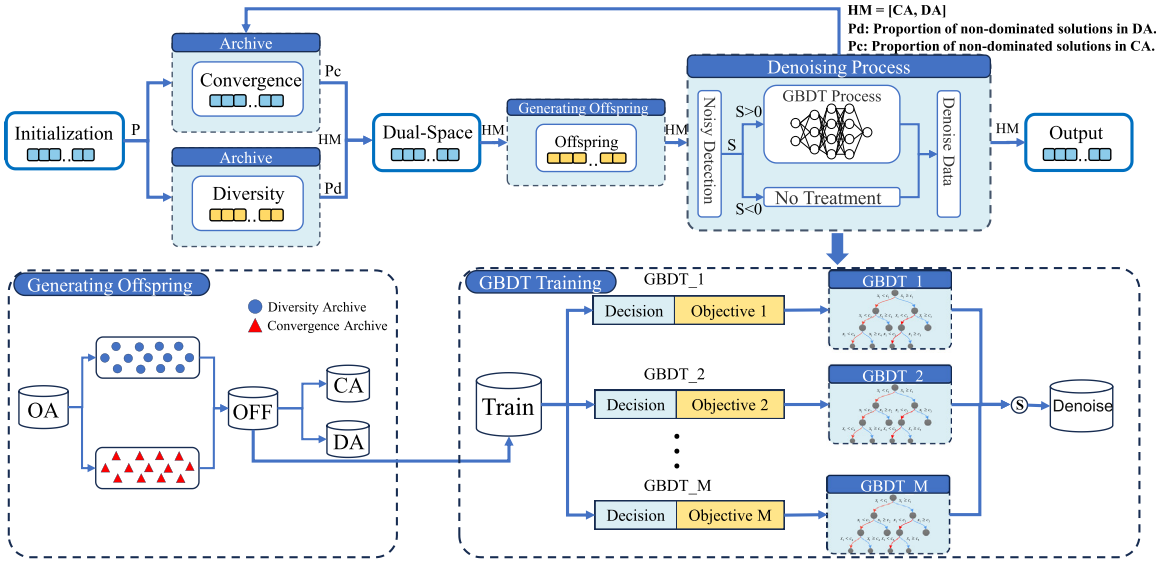
去噪双存档进化算法(DTAEA)首先初始化种群并构建收敛存档(CA)与多样性存档(DA),利用非支配排序评估个体,并通过融合决策空间与目标空间的双空间拥挤度指标剔除冗余个体以维持种群分布均匀性。在迭代过程中,算法由双存档交叉变异产生子代,并进行噪声水平检测:若检测到噪声,则依次调用GBDT与均值去噪方法对子代目标值进行自适应降噪修复;否则保持子代不变。
基于理想点的拥挤度距离数据选择
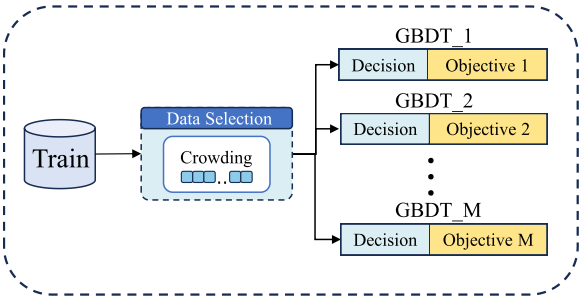
算法首先利用历史演化个体构建动态训练存档,并基于当前非支配解集的客观最值确立边界框架 Z m i n , Z m a x Z_{min},Z_{max} Zmin,Zmax,从中筛选符合帕累托前沿演化趋势的候选解:
T r a i n = { Z i = { f 1 , f 2 , ... , f M } ∣ z m i n , j ≤ f j ≤ z m a x , j , i = 1 , 2 , ... , N , j = 1 , 2 , ... , l Train=\{Z_i=\{f_1,f_2,\ldots,f_M\}\mid z_{min,j}\leq f_j\leq z_{max,j},i=1,2,\ldots,N,j=1,2,\ldots,l Train={Zi={f1,f2,...,fM}∣zmin,j≤fj≤zmax,j,i=1,2,...,N,j=1,2,...,l
对筛选数据进行非支配分层,并逐层计算个体的总拥挤度距离:
C D i = ∑ j = 1 M f j ( i + 1 ) − f j ( i − 1 ) f j M A X − f j M I N CD_i=\sum_{j=1}^M\frac{f_j(i+1)-f_j(i-1)}{f_j^{MAX}-f_j^{MIN}} CDi=j=1∑MfjMAX−fjMINfj(i+1)−fj(i−1)
通过设定阈值剔除拥挤度过小的冗余个体。
基于GBDT的创新去噪模块
网络利用训练存档中解的决策变量与目标值,针对 M M M 个目标独立训练并组装成整体去噪结构。为提升计算效率,算法引入保真度指标,仅在降噪效果连续低于阈值且保真度递减至零时才触发模型重训。在去噪阶段,子代决策向量输入网络以预测真实目标值,并通过边界约束对异常预测值进行过滤:
f i D e = { f i , if f i D e > f i M A X or f i D e < f i M I N f i D e , else f_i^{De} = \begin{cases} f_i, & \text{if } f_i^{De} > f_i^{MAX} \text{ or } f_i^{De} < f_i^{MIN} \\ f_i^{De}, & \text{else} \end{cases} fiDe={fi,fiDe,if fiDe>fiMAX or fiDe<fiMINelse
双空间拥挤度距离
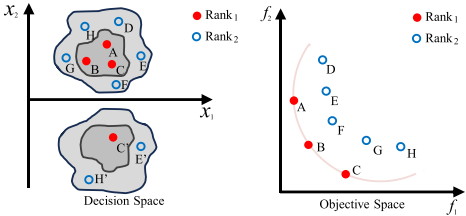
在决策空间中,通过计算个体间的欧氏距离,取其 k k k 个最近邻个体的平均距离作为决策空间拥挤度:
C D i , x = ∑ j = 1 k ∑ m = 1 D ( x i m − x j m ) 2 k CD_{i,x} = \frac{\sum_{j=1}^{k} \sqrt{\sum_{m=1}^{D} (x_i^m - x_j^m)^2}}{k} CDi,x=k∑j=1k∑m=1D(xim−xjm)2
在目标空间中,通过计算个体在各子目标上与相邻两解的距离之和作为目标空间拥挤度:
C D i , f = ∑ k = 1 M ( P f k ( i + 1 ) − P f k ( i − 1 ) ) CD_{i,f} = \sum_{k=1}^{M} (P_{f_k}(i+1) - P_{f_k}(i-1)) CDi,f=k=1∑M(Pfk(i+1)−Pfk(i−1))
将两空间拥挤度分别归一化为 C D i , k CD_{i,k} CDi,k ( k = x , f k=x,f k=x,f) 后,采用协同选择策略计算最终的双空间拥挤度:
D S C D i = { max ( C D i , x , C D i , f ) , if ( C D i , x > C D a v g , x or C D i , f > C D a v g , f ) min ( C D i , x , C D i , f ) , otherwise DSCD_i = \begin{cases} \max(CD_{i,x}, CD_{i,f}), & \text{if } (CD_{i,x} > CD_{avg,x} \text{ or } CD_{i,f} > CD_{avg,f}) \\ \min(CD_{i,x}, CD_{i,f}), & \text{otherwise} \end{cases} DSCDi={max(CDi,x,CDi,f),min(CDi,x,CDi,f),if (CDi,x>CDavg,x or CDi,f>CDavg,f)otherwise
4.结果展示
5.参考文献
Balancing Global and Local Search via Q-Learning in Evolutionary Algorithms for Air Defense Resource Assignment Problems
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx