
🔥草莓熊Lotso: 个人主页
❄️个人专栏: 《C++知识分享》 《Linux 入门到实践:零基础也能懂》
✨生活是默默的坚持,毅力是永久的享受!
🎬 博主简介:

文章目录
- 前言
- 一、信号量核心基础原理
-
- [1.1 信号量的本质与核心作用](#1.1 信号量的本质与核心作用)
- [1.2 信号量值的含义](#1.2 信号量值的含义)
- [1.3 P/V 原语核心逻辑](#1.3 P/V 原语核心逻辑)
- [1.4 System V 信号量核心内核结构体](#1.4 System V 信号量核心内核结构体)
- [二、System V 信号量三大核心 API 详解](#二、System V 信号量三大核心 API 详解)
-
- [2.1 semget:创建 / 获取信号量集](#2.1 semget:创建 / 获取信号量集)
- [2.2 semctl:信号量集控制操作](#2.2 semctl:信号量集控制操作)
- [2.3 semop:信号量 P/V 原子操作](#2.3 semop:信号量 P/V 原子操作)
- 三、建造者模式设计思想
-
- [3.1 建造者模式核心概念](#3.1 建造者模式核心概念)
- [3.2 为什么用建造者模式封装信号量?](#3.2 为什么用建造者模式封装信号量?)
- 四、基于建造者模式的信号量封装源码深度解读
-
- [4.1 封装整体设计思路](#4.1 封装整体设计思路)
- [4.2 核心产品类:Semaphore 信号量封装](#4.2 核心产品类:Semaphore 信号量封装)
- [4.3 简易建造者类:SemaphoreBuilder](#4.3 简易建造者类:SemaphoreBuilder)
- [4.4 标准建造者模式完整扩展(大家看不懂的话可以私聊找我要飞书笔记版本)](#4.4 标准建造者模式完整扩展(大家看不懂的话可以私聊找我要飞书笔记版本))
- 五、实战落地:父子进程临界资源互斥访问测试
- [5.1 测试场景说明](#5.1 测试场景说明)
- [5.2 测试核心源码](#5.2 测试核心源码)
- [5.3 测试结果与结论](#5.3 测试结果与结论)
- 六、高频面试考点与实战踩坑总结
-
- [6.1 面试核心考点](#6.1 面试核心考点)
- [6.2 实战踩坑避坑指南](#6.2 实战踩坑避坑指南)
- 结尾:
前言
在 Linux 多进程编程中,临界资源的互斥访问与进程间时序同步是永恒的核心问题,而 System V 信号量正是解决这类问题的经典内核机制。作为 Linux 系统编程的必备知识点,信号量不仅是面试高频考点,更是实现共享内存、消息队列等进程间通信场景的同步基石。但原生 System V 信号量 API 存在接口繁琐、参数复杂、创建与初始化流程割裂、资源生命周期管理困难等问题,新手极易出现使用错误、资源泄漏甚至死锁问题。本文将从信号量核心原理出发,完整拆解 System V 信号量三大核心 API,结合建造者设计模式,实现一套易用、健壮、可扩展的信号量 C++ 封装,同时覆盖实战踩坑点与面试核心考点。
一、信号量核心基础原理
1.1 信号量的本质与核心作用
信号量本质上是一个受内核保护的计数器 ,是实现多执行流(进程 / 线程)间互斥 与同步的核心机制:
- 互斥:保证同一时间只有一个执行流访问临界资源,二元信号量(初始值为 1)可直接当做互斥锁使用
- 同步:保证多个执行流之间的执行时序,协调不同进程的工作流程
1.2 信号量值的含义
信号量的计数值S有着明确的操作系统级定义,也是面试核心考点:
- S > 0:表示当前可用的临界资源个数,执行流可成功获取资源
- S = 0:表示当前无可用资源,且没有执行流在等待队列中
- S < 0 :表示当前无可用资源,
|S|的值为等待该资源的阻塞执行流个数
1.3 P/V 原语核心逻辑
P、V 原语是信号量的核心操作,由迪杰斯特拉提出,所有操作均为原子操作,由操作系统内核保证执行的完整性。
P 原语(获取资源)
c
P(s)
{
s.value = s.value--;
if (s.value < 0)
{
// 将当前进程置为等待状态
// 将进程PCB插入信号量的等待队列尾部
// 进程阻塞,让出CPU
}
}核心逻辑:申请资源,计数器减 1;若资源不足,则将当前进程阻塞,放入等待队列。
V 原语(释放资源)
c
V(s)
{
s.value = s.value++;
if (s.value > 0)
{
// 唤醒等待队列中第一个阻塞的进程
// 将进程状态改为就绪态,插入OS就绪队列
}
}核心逻辑:释放资源,计数器加 1;若有进程在等待资源,则唤醒队首的阻塞进程。
1.4 System V 信号量核心内核结构体
System V 信号量在内核中以信号量集为单位管理,核心结构体如下:
- 信号量集结构体
semid_ds
c
struct semid_ds {
struct ipc_perm sem_perm; /* 所有者与权限信息 */
time_t sem_otime; /* 最后一次semop操作时间 */
time_t sem_ctime; /* 最后一次状态修改时间 */
unsigned long sem_nsems; /* 信号量集中的信号量个数 */
};- 权限结构体
ipc_perm
c
struct ipc_perm {
key_t __key; /* 信号量集的键值,由semget传入 */
uid_t uid; /* 所有者有效UID */
gid_t gid; /* 所有者有效GID */
uid_t cuid; /* 创建者有效UID */
gid_t cgid; /* 创建者有效GID */
unsigned short mode; /* 访问权限 */
};二、System V 信号量三大核心 API 详解
System V 信号量的所有操作都围绕三个核心系统调用展开,也是封装的基础。
2.1 semget:创建 / 获取信号量集
c
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/sem.h>
int semget(key_t key, int nsems, int semflg);参数说明:
key:信号量集的唯一键值,通过ftok生成,用于不同进程标识同一个信号量集nsems:信号量集中需要创建的信号量个数semflg:创建标志与权限位,常用组合:IPC_CREAT | IPC_EXCL | 0666:创建新的信号量集,若已存在则报错IPC_CREAT:获取已存在的信号量集,若不存在则创建
返回值:成功返回信号量集 ID(非负整数),失败返回 - 1 并设置 errno。
2.2 semctl:信号量集控制操作
c
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/sem.h>
int semctl(int semid, int semnum, int cmd, ...);参数说明:
semid:semget 返回的信号量集 IDsemnum:要操作的信号量在集合中的序号(从 0 开始)cmd:要执行的控制命令,核心常用命令:SETVAL:设置单个信号量的初始值,需传入自定义union semun联合体IPC_RMID:删除整个信号量集,semnum 参数会被忽略GETVAL:获取单个信号量的当前计数值
- 可变参数:需自定义
union semun联合体,系统不会提供定义
c
union semun {
int val; /* SETVAL用:信号量初始值 */
struct semid_ds *buf; /* IPC_STAT/IPC_SET用:内核结构体缓冲区 */
unsigned short *array; /* GETALL/SETALL用:信号量值数组 */
struct seminfo *__buf; /* Linux特有:IPC_INFO用 */
};返回值:失败返回 - 1,成功根据 cmd 返回对应非负数值。
2.3 semop:信号量 P/V 原子操作
c
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/sem.h>
int semop(int semid, struct sembuf *sops, size_t nsops);参数说明:
semid:semget 返回的信号量集 IDsops:指向sembuf结构体数组的指针,每个元素对应一个信号量的操作nsops:sops 数组中的元素个数,支持同时对多个信号量执行原子操作
核心结构体 **sembuf**:
c
struct sembuf {
unsigned short sem_num; /* 要操作的信号量序号 */
short sem_op; /* 操作类型:-1=P操作,1=V操作 */
short sem_flg; /* 操作标志:SEM_UNDO/IPC_NOWAIT */
};SEM_UNDO:进程退出时,操作系统自动撤销该进程对信号量的操作,防止进程异常退出导致死锁IPC_NOWAIT:非阻塞操作,资源不足时直接返回错误,不阻塞进程
返回值:成功返回 0,失败返回 - 1 并设置 errno。
三、建造者模式设计思想
3.1 建造者模式核心概念
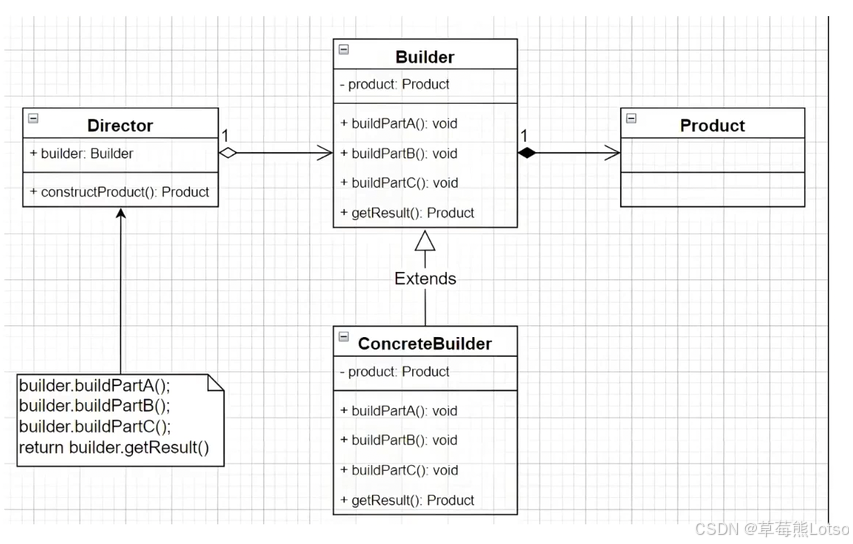
建造者模式是创建型设计模式的一种,核心思想是将复杂对象的构建过程与它的表示分离,使得同样的构建过程可以创建不同的表示。
标准建造者模式包含四个核心角色:
- 产品类(Product) :要构建的复杂对象,本文中为
Semaphore信号量类 - 抽象建造者(Builder):定义构建产品各个部件的抽象接口
- 具体建造者(ConcreteBuilder):实现抽象接口,完成产品各部件的具体构建
- 指挥者(Director):定义构建流程,调用建造者的接口完成对象创建
3.2 为什么用建造者模式封装信号量?
原生 System V 信号量的使用存在明显的痛点,完美适配建造者模式的适用场景:
- 构建流程复杂 :一个可用的信号量需要经过
ftok生成key、semget创建集合、semctl初始化值三个步骤,步骤顺序固定且不可颠倒 - 参数多且强依赖:信号量的创建依赖键值、信号量个数、初始值、权限等多个参数,参数错误会直接导致创建失败
- 初始化与使用分离:原生 API 创建和初始化是两个独立的调用,极易出现创建后未初始化就使用的致命错误
- 多场景构建需求:支持「创建全新信号量集」和「获取已有信号量集」两种完全不同的构建场景
通过建造者模式,我们可以将复杂的构建逻辑封装在建造者类中,对外提供极简的链式调用接口,同时保证构建流程的合法性与完整性。
四、基于建造者模式的信号量封装源码深度解读
4.1 封装整体设计思路
本次封装分为两个版本,循序渐进实现工业级能力:
- 简易建造者版本:实现核心的链式构建,满足单信号量的常用场景,代码简洁易读
- 完整建造者版本:遵循标准建造者模式,支持多信号量集的灵活构建,可扩展性拉满
4.2 核心产品类:Semaphore 信号量封装
核心源码
cpp
class Semaphore
{
public:
Semaphore(int semid, int flag) : _semid(semid), _flag(flag)
{}
// 核心P操作:获取资源
void P()
{
struct sembuf sb;
sb.sem_num = 0;
sb.sem_op = -1;
sb.sem_flg = SEM_UNDO;
::semop(_semid, &sb, 1);
}
// 核心V操作:释放资源
void V()
{
struct sembuf sb;
sb.sem_num = 0;
sb.sem_op = 1;
sb.sem_flg = SEM_UNDO;
::semop(_semid, &sb, 1);
}
// 重载版本:支持多信号量集中指定序号的PV操作
void P(int sem_num)
{
PV(sem_num, -1);
}
void V(int sem_num)
{
PV(sem_num, 1);
}
~Semaphore()
{
// 仅创建者销毁信号量集,获取者不执行销毁
if(_flag == BUILD_SEM && _semid >= 0)
{
::semctl(_semid, 0, IPC_RMID);
std::cout << "sem set destroy! semid: " << _semid << std::endl;
}
}
private:
// 通用PV操作封装
void PV(int sem_num, int op)
{
struct sembuf sb;
sb.sem_num = sem_num;
sb.sem_op = op;
sb.sem_flg = SEM_UNDO;
::semop(_semid, &sb, 1);
}
int _semid; // 信号量集ID
int _flag; // 构建标志,区分创建者与获取者
};
using sem_sptr = std::shared_ptr<Semaphore>;源码核心解读
- RAII 资源管理 :析构函数中自动判断对象角色,仅信号量创建者会执行
IPC_RMID销毁信号量集,避免重复销毁与资源泄漏 - SEM_UNDO 安全保障 :所有 PV 操作均设置
SEM_UNDO标志,防止进程异常退出导致信号量状态异常引发死锁 - 接口极简设计 :封装原生
semop的复杂参数,对外仅暴露P()和V()两个核心接口,降低使用门槛 - 智能指针适配 :定义
shared_ptr别名,配合建造者模式实现自动生命周期管理,避免内存泄漏
4.3 简易建造者类:SemaphoreBuilder
核心源码
cpp
class SemaphoreBuilder
{
public:
SemaphoreBuilder() : _val(-1)
{}
// 链式设置信号量初始值
SemaphoreBuilder &SetVal(int val)
{
_val = val;
return *this;
}
// 核心构建方法
sem_sptr Build(int flag)
{
// 合法性校验:创建信号量必须设置初始值
if (BUILD_SEM == flag && _val < 0)
{
std::cerr << "you must set init value first!" << std::endl;
return nullptr;
}
// 1. 生成唯一key值
key_t k = ::ftok(pathname.c_str(), proj_id);
if (k < 0)
{
std::cerr << "ftok failed!" << std::endl;
return nullptr;
}
// 2. 创建/获取信号量集
int semid = ::semget(k, 1, flag);
if (semid < 0)
{
std::cerr << "semget failed! errno: " << errno << std::endl;
return nullptr;
}
// 3. 仅创建新信号量时执行初始化
if (BUILD_SEM == flag)
{
union semun un;
un.val = _val;
int n = ::semctl(semid, 0, SETVAL, un);
if (n < 0)
{
std::cerr << "semctl SETVAL failed! errno: " << errno << std::endl;
return nullptr;
}
}
// 4. 返回构建完成的信号量对象
return std::make_shared<Semaphore>(semid, flag);
}
private:
int _val; // 信号量初始值
};源码核心解读
- 链式调用设计 :
SetVal返回自身引用,支持sb.SetVal(1).Build(BUILD_SEM)的流式调用,代码可读性拉满 - 构建流程强校验:创建新信号量时强制校验初始值,从根源避免「创建未初始化就使用」的经典错误
- 双场景适配 :同一个
Build方法兼容「创建新信号量集」和「获取已有信号量集」两种场景,通过 flag 参数区分 - 错误处理全覆盖 :对
ftok、semget、semctl所有系统调用做错误处理,定位问题更便捷
4.4 标准建造者模式完整扩展(大家看不懂的话可以私聊找我要飞书笔记版本)
基于标准建造者模式,可进一步扩展抽象建造者接口、具体建造者、指挥者类,实现多信号量集的灵活构建,支持:
- 自定义信号量个数、每个信号量的独立初始值
- 自定义访问权限、key 值生成规则
- 固定构建流程的标准化封装,避免人为操作失误
这个版本严格遵循 GoF 设计模式,包含抽象建造者接口、具体建造者、指挥者、产品类四个核心角色,支持构建包含多个信号量的复杂信号量集。
cpp
#ifndef SEM_V2_HPP
#define SEM_V2_HPP
#include <iostream>
#include <string>
#include <vector>
#include <memory>
#include <cstring>
#include <cstdlib>
#include <unistd.h>
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/sem.h>
#include <sys/wait.h>
// 全局常量定义
const std::string SEM_PATH = "/tmp";
const int SEM_PROJ_ID = 0x77;
const int DEFAULT_SEM_NUM = 1;
const mode_t DEFAULT_PERM = 0666;
#define GET_SEM IPC_CREAT
#define BUILD_SEM (IPC_CREAT | IPC_EXCL)
// 必须自定义的联合体,系统不提供
union semun {
int val; /* SETVAL用 */
struct semid_ds *buf; /* IPC_STAT/IPC_SET用 */
unsigned short *array; /* GETALL/SETALL用 */
struct seminfo *__buf; /* Linux特有 */
};
// 辅助函数:整数转十六进制字符串
std::string intToHex(int num) {
char hex[64];
snprintf(hex, sizeof(hex), "0x%x", num);
return std::string(hex);
}
// ==========================================
// 1. 产品类:Semaphore(增强版,支持多信号量)
// ==========================================
class Semaphore {
public:
Semaphore(int semid) : _semid(semid) {}
// 核心PV操作:指定信号量序号
void P(int sem_num = 0) {
PV(sem_num, -1);
}
void V(int sem_num = 0) {
PV(sem_num, 1);
}
// 获取信号量集ID
int Id() const {
return _semid;
}
~Semaphore() {
// 注意:标准版本中,销毁逻辑由建造者或用户显式控制
// 这里不自动销毁,避免多进程场景下的误删
}
// 显式销毁信号量集
bool Destroy() {
if (_semid >= 0) {
int n = semctl(_semid, 0, IPC_RMID);
if (n < 0) {
std::cerr << "semctl IPC_RMID failed! errno: " << errno << std::endl;
return false;
}
std::cout << "Semaphore set " << _semid << " destroyed." << std::endl;
_semid = -1;
return true;
}
return false;
}
private:
// 通用PV封装
void PV(int sem_num, int op) {
struct sembuf sem_buf;
sem_buf.sem_num = sem_num;
sem_buf.sem_op = op;
sem_buf.sem_flg = SEM_UNDO; // 进程退出自动撤销
int n = semop(_semid, &sem_buf, 1);
if (n < 0) {
std::cerr << "semop failed! sem_num: " << sem_num
<< ", op: " << op << ", errno: " << errno << std::endl;
}
}
int _semid;
};
using sem_sptr = std::shared_ptr<Semaphore>;
// ==========================================
// 2. 抽象建造者接口:SemaphoreBuilder
// ==========================================
class SemaphoreBuilder {
public:
virtual ~SemaphoreBuilder() = default;
// 构建步骤接口
virtual void BuildKey() = 0;
virtual void SetPermission(mode_t perm) = 0;
virtual void SetSemNum(int num) = 0;
virtual void SetInitVal(const std::vector<int>& initVal) = 0;
virtual void Build(int flag) = 0;
virtual void InitSem() = 0;
// 获取产品接口
virtual sem_sptr GetSem() = 0;
};
// ==========================================
// 3. 具体建造者类:ConcreteSemaphoreBuilder
// ==========================================
class ConcreteSemaphoreBuilder : public SemaphoreBuilder {
public:
ConcreteSemaphoreBuilder() : _key(-1), _perm(DEFAULT_PERM), _sem_num(DEFAULT_SEM_NUM) {}
// 步骤1:生成Key
void BuildKey() override {
std::cout << "Building semaphore key..." << std::endl;
_key = ftok(SEM_PATH.c_str(), SEM_PROJ_ID);
if (_key < 0) {
std::cerr << "ftok failed! errno: " << errno << std::endl;
exit(1);
}
std::cout << "Got key: " << intToHex(_key) << std::endl;
}
// 步骤2:设置权限
void SetPermission(mode_t perm) override {
_perm = perm;
}
// 步骤3:设置信号量个数
void SetSemNum(int num) override {
_sem_num = num;
}
// 步骤4:设置初始值数组
void SetInitVal(const std::vector<int>& initVal) override {
_initVal = initVal;
}
// 步骤5:创建/获取信号量集
void Build(int flag) override {
std::cout << "Creating/getting semaphore set..." << std::endl;
int semid = semget(_key, _sem_num, flag | _perm);
if (semid < 0) {
std::cerr << "semget failed! errno: " << errno << std::endl;
exit(2);
}
std::cout << "Got semaphore id: " << semid << std::endl;
_sem = std::make_shared<Semaphore>(semid);
}
// 步骤6:初始化信号量(仅BUILD_SEM时调用)
void InitSem() override {
if (_sem_num > 0 && _initVal.size() == static_cast<size_t>(_sem_num)) {
std::cout << "Initializing semaphore set..." << std::endl;
for (int i = 0; i < _sem_num; i++) {
if (!InitOneSem(_sem->Id(), i, _initVal[i])) {
std::cerr << "Init sem " << i << " failed!" << std::endl;
exit(3);
}
}
std::cout << "Semaphore set initialized successfully." << std::endl;
}
}
// 获取最终产品
sem_sptr GetSem() override {
return _sem;
}
private:
// 初始化单个信号量
bool InitOneSem(int semid, int num, int val) {
union semun un;
un.val = val;
int n = semctl(semid, num, SETVAL, un);
return n >= 0;
}
key_t _key;
mode_t _perm;
int _sem_num;
std::vector<int> _initVal;
sem_sptr _sem;
};
// ==========================================
// 4. 指挥者类:Director(定义构建流程)
// ==========================================
class Director {
public:
// 核心构建流程:固定步骤,保证构建合法性
void Construct(std::shared_ptr<SemaphoreBuilder> builder,
int flag,
mode_t perm = DEFAULT_PERM,
int num = DEFAULT_SEM_NUM,
const std::vector<int>& initVal = {1}) {
builder->BuildKey();
builder->SetPermission(perm);
builder->SetSemNum(num);
builder->SetInitVal(initVal);
builder->Build(flag);
// 仅在创建新信号量集时执行初始化
if (flag == BUILD_SEM) {
builder->InitSem();
}
}
};
#endif // SEM_V2_HPP五、实战落地:父子进程临界资源互斥访问测试
5.1 测试场景说明
测试目标:验证二元信号量的互斥能力。父子进程同时向标准输出(显示器,临界资源)打印字符,要求保证打印动作的原子性,实现CC和FF成对出现,无交叉打印。
5.2 测试核心源码
cpp
#include "Sem.hpp"
#include <cstdio>
#include <time.h>
#include <unistd.h>
#include <stdlib.h>
int main()
{
// 建造者构建二元信号量,初始值为1,作为互斥锁
SemaphoreBuilder sb;
auto fsem = sb.SetVal(1).Build(BUILD_SEM);
if (fsem == nullptr)
{
return -1;
}
// 设置随机种子,模拟真实业务耗时
srand(time(nullptr) ^ getpid());
pid_t pid = fork();
if (pid == 0)
{
// 子进程:获取已创建的信号量
auto csem = sb.Build(GET_SEM);
if (csem == nullptr)
{
return -1;
}
int cnt = 10;
while (cnt--)
{
csem->P(); // 进入临界区加锁
printf("C");
fflush(stdout);
usleep(rand() % 95270); // 模拟临界区耗时
printf("C ");
fflush(stdout);
csem->V(); // 离开临界区解锁
usleep(rand() % 43990); // 模拟非临界区耗时
}
exit(0);
}
// 父进程
int cnt = 10;
while (cnt--)
{
fsem->P(); // 进入临界区加锁
printf("F");
fflush(stdout);
usleep(rand() % 95270); // 模拟临界区耗时
printf("F ");
fflush(stdout);
fsem->V(); // 离开临界区解锁
usleep(rand() % 43990); // 模拟非临界区耗时
}
// 等待子进程退出
waitpid(pid, nullptr, 0);
return 0;
}5.3 测试结果与结论
- 无信号量保护 :打印结果出现
FCFCFC交叉乱序,临界资源访问出现竞态条件 - 有信号量保护 :打印结果严格成对出现
FF CC FF CC,完美实现临界资源的互斥访问 - 生命周期验证 :进程退出后,通过
ipcs -s可验证信号量集被自动销毁,无资源泄漏
六、高频面试考点与实战踩坑总结
6.1 面试核心考点
- 信号量与互斥锁的区别:互斥锁只能实现互斥,信号量既可实现互斥也可实现同步;互斥锁必须由加锁线程解锁,信号量的 V 操作可由任意执行流执行
- P/V 原语的原子性:P/V 操作的原子性由操作系统内核保证,执行过程中不会被 CPU 调度打断,是实现同步互斥的基础
- SEM_UNDO 标志的作用:进程退出时,内核自动撤销该进程对信号量的所有操作,防止进程异常退出导致信号量值永久异常,引发死锁
- System V IPC 的生命周期 :System V 信号量、共享内存、消息队列的生命周期均随内核,进程退出不会自动销毁,必须手动调用 ctl 接口删除,或通过
ipcrm命令清理 - 二元信号量与互斥锁的差异:二元信号量初始值为 1,可实现互斥效果,但与互斥锁有本质区别:信号量有 "拥有者" 概念,可实现跨进程同步,而互斥锁一般用于同进程内线程互斥
- 建造者模式的适用场景与优势:适用于对象构建流程复杂、参数多、有多个构建变体的场景;优势是解耦构建与表示、保证构建流程固定、代码可读性与可扩展性强
6.2 实战踩坑避坑指南
- 必须自定义 union semun 联合体:该联合体系统头文件不提供定义,必须手动声明,否则会出现编译错误或运行时异常
- 信号量集删除的 semnum 参数 :调用
semctl执行IPC_RMID时,semnum 参数会被内核忽略,传 0 即可,无需关注信号量个数 - ftok 生成 key 的唯一性问题:ftok 基于文件 inode 和 proj_id 生成 key,若文件被删除重建,inode 会变化,导致相同路径生成不同 key,无法获取已有信号量集
- 多进程信号量销毁时机:必须保证所有进程都不再使用信号量集后,再执行销毁操作,否则会导致正在使用的进程出现操作失败
- 避免信号量操作的死锁:P/V 操作必须成对出现,临界区中异常退出、return 等场景必须保证 V 操作执行,可配合 RAII 守卫类实现自动解锁
结尾:
html
🍓 我是草莓熊 Lotso!若这篇技术干货帮你打通了学习中的卡点:
👀 【关注】跟我一起深耕技术领域,从基础到进阶,见证每一次成长
❤️ 【点赞】让优质内容被更多人看见,让知识传递更有力量
⭐ 【收藏】把核心知识点、实战技巧存好,需要时直接查、随时用
💬 【评论】分享你的经验或疑问(比如曾踩过的技术坑?),一起交流避坑
🗳️ 【投票】用你的选择助力社区内容方向,告诉大家哪个技术点最该重点拆解
技术之路难免有困惑,但同行的人会让前进更有方向~愿我们都能在自己专注的领域里,一步步靠近心中的技术目标!结语:本文从信号量的核心原理出发,完整拆解了 System V 信号量的三大核心 API,结合建造者设计模式,实现了一套工业级的 C++ 信号量封装,解决了原生 API 繁琐、易出错、难管理的痛点。这套封装不仅可以直接用于生产环境的多进程同步互斥场景,更是学习 Linux 系统编程、设计模式的绝佳实战案例。基于此封装,还可以进一步扩展实现共享内存的同步访问、生产者消费者模型、多进程任务调度等进阶功能,真正做到从原理到实战的融会贯通。
✨把这些内容吃透超牛的!放松下吧✨ ʕ˘ᴥ˘ʔ づきらど
