1.摘要
针对无人机载重和续航受限问题,本文提出一种基于层级分解协同演化框架(CH-SaBO),用于求解车机协同路径规划问题(VRP-D)。通过协同演化将原问题分解为多个单车子问题以降低维度;采用层级分解策略,自上而下将解细分为路径、操作、弧段等要素,并自下而上构建关联矩阵来捕捉时空耦合关系,以k-medoids聚类分组;设计重叠策略优化子问题边界,并利用代理模型辅助双层优化器独立求解各子问题。
2.问题背景
问题描述
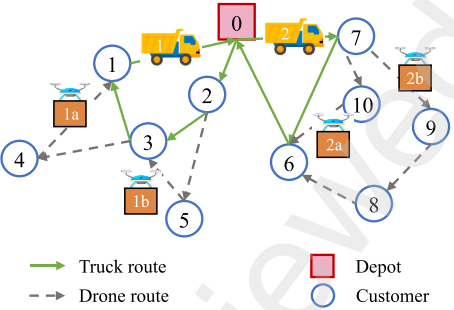
无人机协同车辆路径(VRP-D)通过卡车队与无人机团队协作,以最小化总完工时间(Makespan)为目标服务所有客户。每个客户仅由卡车或无人机服务一次。卡车可将无人机运至目的地附近,无人机起飞服务若干受限于载重和电量的客户后,必须返回卡车节点充电并补货,两车可在交汇点相互等待。
最小化总完工时间为目标:
min{t∣t≥tn+1k,k∈K} \min\{t\mid t\geq t_{n+1}^k,k\in\mathcal{K}\} min{t∣t≥tn+1k,k∈K}
3.用于 VRP-D 层级分解协同演化算法
个体适应度评估
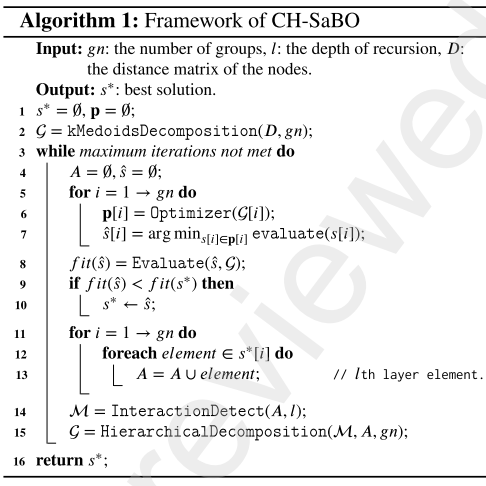
对于CARP和VRP等组合优化问题,可行解由多个子可行解组合而成。定义Ω={Ωi,i∈1,gn}\Omega=\{\Omegai,i\in1,gn\}Ω={Ωi,i∈1,gn} 为车队集合每个车队包含一辆卡车及所属无人机),s={si,i∈1,gn}s=\{si,i\in1,gn\}s={si,i∈1,gn}为混合路径解,其中si=⟨tr,dr⟩si=\langle tr,dr\ranglesi=⟨tr,dr⟩表示第iii个车队服务其对应客户集Gi\mathcal{G}iGi的可行路径代价。整个解适应度值由耗时最长的车队路径决定:
fit(s)=max{fit(si),i∈1,gn}fit(s)=\max\{fit(si),i\in1,gn\}fit(s)=max{fit(si),i∈1,gn}
层次分解
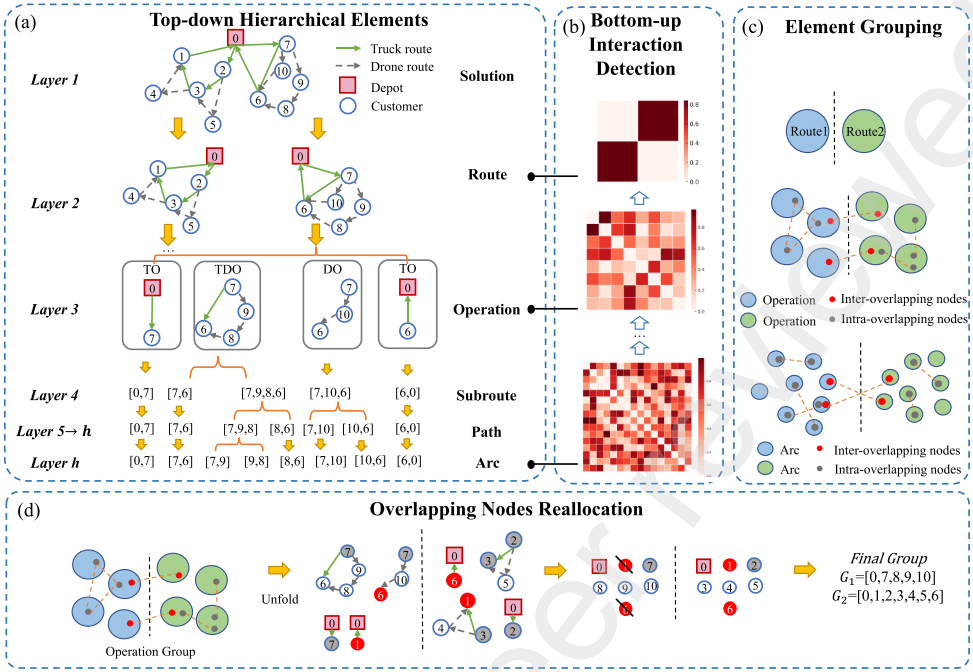
算法自上而下将完整解递归拆解为路径、车机协同操作、子路径,直至叶子节点的最小弧段单元,并通过重叠节点保留局部时空关联。利用叶子层弧段端点间的平均欧几里得距离计算初始交互
ϵij=∑i=1∣e1∣∑j=1∣e2∣de1ie2j∣e1∣∗∣e2∣\epsilon_{ij}=\frac{\sum_{i=1}^{|e_1|}\sum_{j=1}^{|e_2|}d_{e_{1i}e_{2j}}}{|e_1|*|e_2|}ϵij=∣e1∣∗∣e2∣∑i=1∣e1∣∑j=1∣e2∣de1ie2j
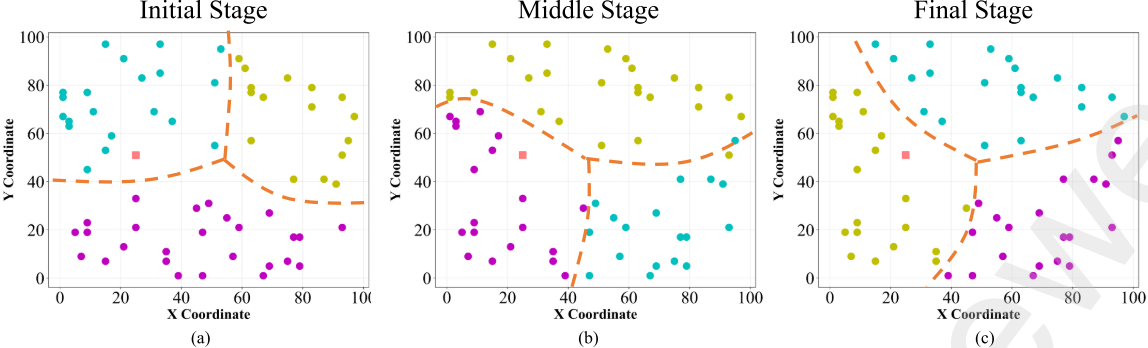
算法自下而上递归聚合子要素交互得分,构筑出高层级要素的交互矩阵,借助CLARANS聚类算法,依据该矩阵将高层要素自适应划分为gngngn个子问题资源组,实现大规模解空间降维。
各子问题随后采用SaBO优化器进行独立求解,该优化器将单车VRP-D转化为旅行商分配问题(TSPA)与无人机选址路由问题(DLR)的双层模型,并结合机器学习技术引导卡车路径生成。
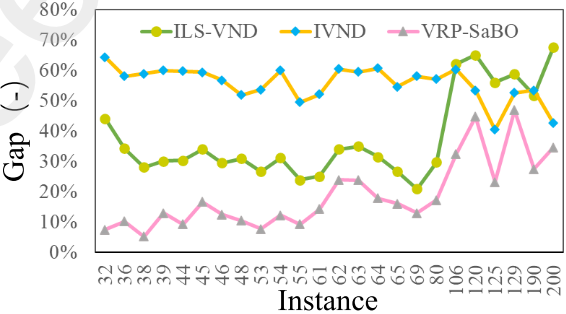
4.结果展示
5.参考文献
Duan Z, Zhang Y, Zhao Q, et al. Dynamic path planning for certain mobile robots in the 3D rough terrain: Fusion of the Q-learning enhanced MOPSO and improved DWAJ. Mathematics and Computers in Simulation, 2026.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx