1、线性时不变系统的稳定性
LTI 系统的稳定性理论与传递函数和特征方程密切相关。假定初始条件为零,将输出与输入的拉普拉斯变换之比定义为 LTI 系统的传递函数。传递函数由 s 域多项式之比给出:
{7.7}
将传递函数的分母定义为特征方程:
{7.8}
特征方程包含了系统动态特性的重要信息。特征方程的解称为系统的极点或固有模式。极点在 s 平面中的位置决定了系统的稳定性。
如果极点位于 s 面右半平面(RHP)或虚轴上,则定义 LTI 系统是不稳定的。如果极点位于 s 面 RHP 上,LTI 系统的输出呈指数或正弦增长;如果极点位于虚轴上,LTI 系统的输出将一直振荡。
相反,如果所有的极点位于 s 域左半平面(LHP)上,则定义 LTI 系统是稳定的。稳定的 LTI 系统没有任何的增长或者振荡,所有的瞬态响应最终都稳定在终值。因此,稳定的 LTI 系统在稳定状态下建立稳定的工作点。如果系统受到内外部的干扰,稳定的系统总是返回到初始工作点。
2、DC-DC 变换器的小信号稳定性
如下所述,将经典稳定性理论扩展到非线性时变 PWM DC-DC 变换器中。如果变换器在稳态下产生周期性电路波形,DC-DC 变换器就是稳定的。稳定电感器电流固定在周期性三角波中,稳定的输出电压在预期直流分量上周期波动。稳定的 DC-DC 变换器的平均电路波形与不稳定的 LTI 系统产生的电路波形不一样。相反,不稳定的 DC-DC 变换器的平均电路波形将表现出不稳定的 LTI 系统的电路特性。
DC-DC 变换器的平均模型利用了稳定性理论,以测试变换器是否能周期地稳态工作,或者确定变换器的稳定性。然而,经典稳定性理论不能直接应用于变换器的平均模型,因为平均模型的时间虽然不变,但是仍然是非线性的。作为替代方案,通过线性化平均模型获得的s域小信号模型能用于稳定性分析。
小信号模型是非线性平均模型的线性近似。该近似只在变换器的初始工作点邻域。因此,小信号模型的有效性受限于给定工作点的邻域,即小信号模型的稳定性分析结果只能用于局部稳定性。换言之,稳定性理论只提供变换器在给定工作点邻域的信息,并不适用于判断变换器的大信号稳定性。定义小信号模型上的稳定性为小信号稳定性。尽管小信号模型存在上述限制,但它仍是分析非线性时变 DC-DC 变换器稳定性非常有用的方法。
基于上述讨论,现将经典稳定性理论应用于变换器的小信号模型。如果小信号模型是稳定的,变换器将会周期地稳定工作。此外,如果干扰幅度不大,变换器会承受外部和内部的干扰,并返回到初始状态。
3、奈奎斯特准则
奈奎斯特准则在经典稳定性理论中起着核心作用。
奈奎斯特准则提供了一个图形化方法,用于确定下列特征方程中的 RHP 根:
{7.9}
式中,T(s) 是 s 域有理函数。奈奎斯特准则基于众所周知的关系
{7.10}
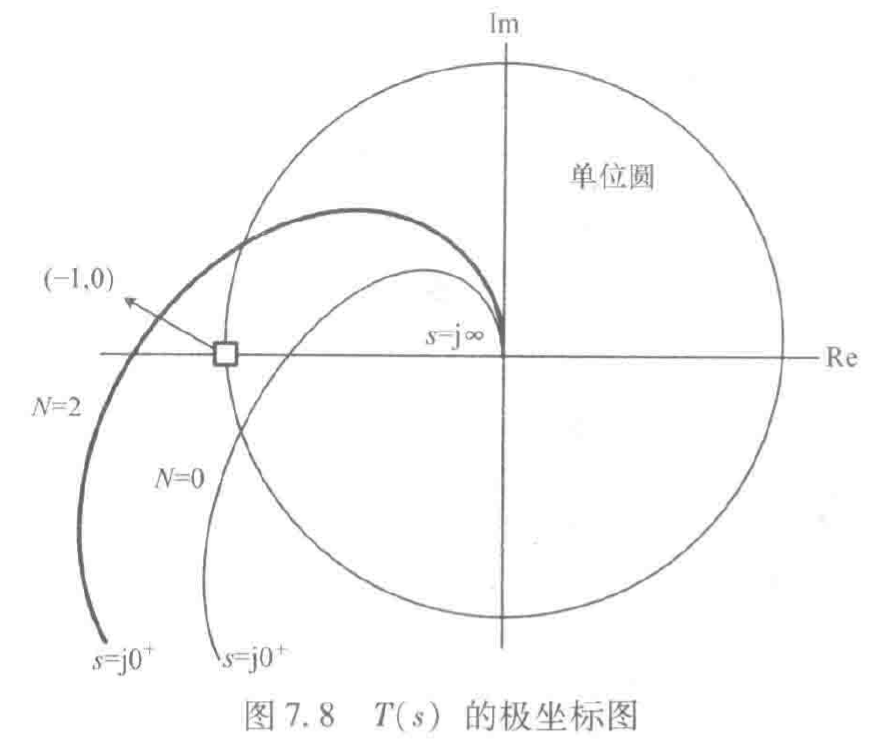
式中,Z 是 时的 RHP 根数;N 是 T(s) 极坐标图中包围 (-1,0) 点的个数;P 是 T(s) 的 RHP 极点数。
如图 7.8 所示,从 的频率范围内,T(s) 单调减小。用细线描绘的极坐标图不包含 (-1,0) 点,因此 N=0。另一方面,用粗线描绘的极坐标图包含 (-1,0) 点。需要注意的是,图 7.8 中极坐标图仅用于正频率,曲线的补充部分为负频率,是实轴上原始图的对称镜像。当考虑正、负频率时,极坐标图两次包含 (-1,0) 点,故 N=2。如果已知极坐标图中 T(s) 的 RHP 极点数 P,则由式(7.10)中的
求 Z 域 RHP 极点数。

奈奎斯特准则适用于 DC-DC 变换器的稳定性分析。将梅森增益法则应用于图 7.3 中变换器的小信号模型,闭环控制变换器的音频敏感度为
{7.11}
输入-输出传递函数 为
{7.12}
音频敏感度
{7.13}
特征方程
{7.14}
如果方程 不包含任何 RHP 根,则通过方程
是否存在 RHP 根来确定其稳定性,即方程
利用奈奎斯特准则判断其稳定性,其中环路增益已定义为
。
上述讨论中有几点需要注意:首先,前面的分析利用了音频敏感度,因为所有的传递函数都具有相同的分母,任何闭环传递函数都可以用于稳定性分析;其次,三种基本变换器的功率级传递函数实际上没有 RHP 极点,如前面的假设一样,方程 没有 RHP 根;最后,三种基本变换器的环路增益为
,不包含 RHP 极点:P=0。因此,奈奎斯特准则可简化如下:特征方程中 RHP 根的数量与环路增益极坐标图 (-1,0) 点包围数相同:Z=N。在该情况下,可利用极坐标图的正频率部分简单地测试系统的稳定性,稳定系统的极坐标图不包含(-1,0)点。
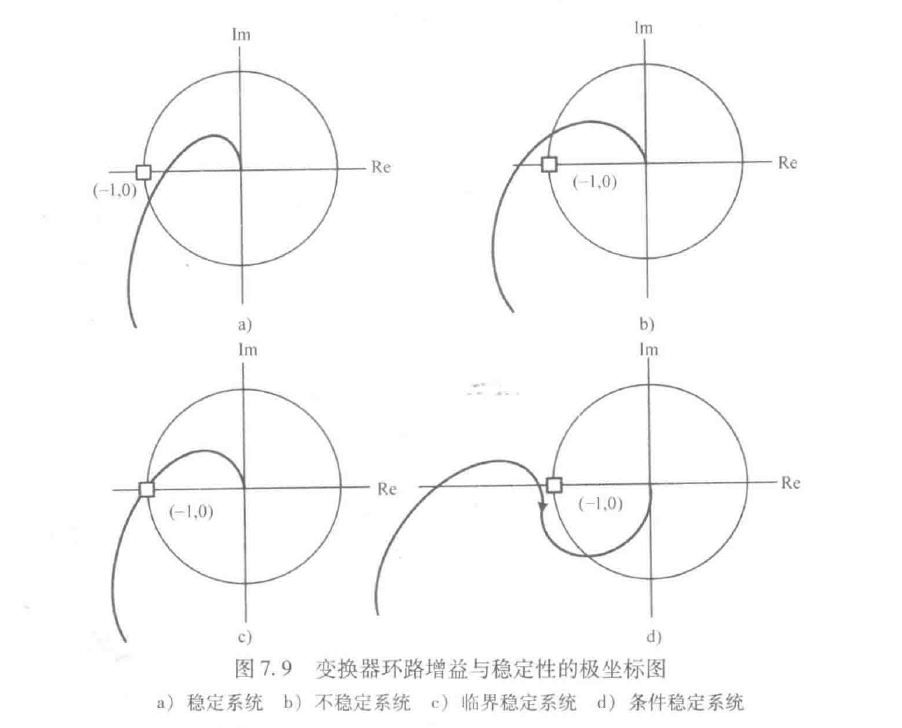
图 7.9a 显示稳定情况下,变换器环路增益的极坐标图未包围 (-1,0) 点。
图 7.9b 是不稳定的极坐标图,包围 (-1,0) 点。
图 7.9c 是临界稳定情况,极坐标图恰好通过 (-1,0) 点。临界稳定介于稳定与不稳定之间。该情况下,系统在虚轴上有一对极点,并在时域响应中一直振荡。
图 7.9d 是一个特殊情况,其中变换器环路增益的极坐标图未包围 (-1,0) 点。极坐标图与单位圆外的实轴相交,极坐标图在与单位圆相交之前再次通过实轴,最后接近原点但不包围 (-1,0) 点。
具有这些环路增益特性的系统称为条件稳定系统。由于极性判别模式,条件稳定系统虽然稳定,但是在实际应用中可能会出现问题。
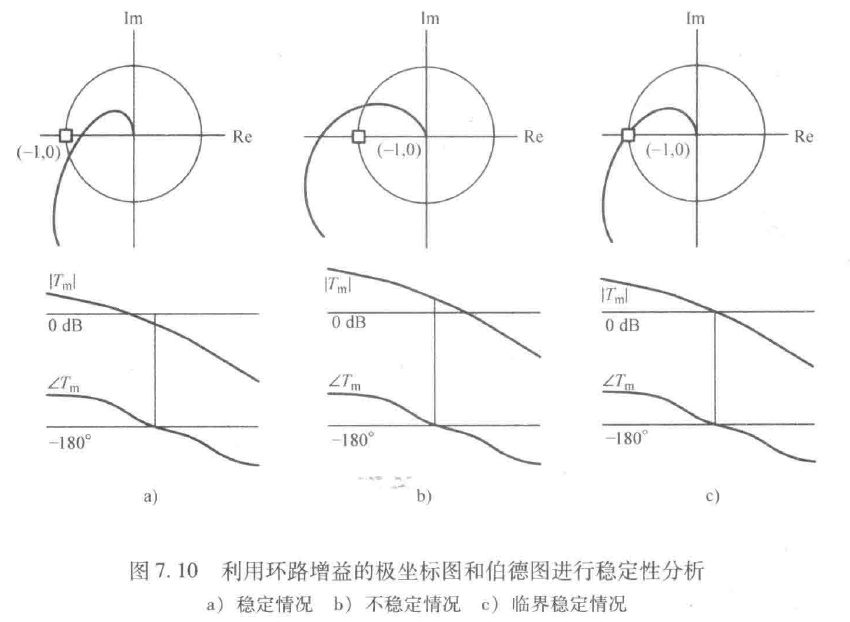
图 7.10 分别以伯德图和极坐标图表示图 7.9 中的前三种情况,以说明奈奎斯特准则也可应用于以伯德图表示的环路增益。
1)图 7.10a 中的稳定情况:极坐标图与实轴相交于 (-1,0) 点与原点之间的点,即极坐标图与实轴的截距小于 1:,如图 7.10a 的伯德图所示。
2)图 7.10b 中的不稳定情况:极坐标图与实轴相交于 (-1,0) 与 (-,0) 之间的点,包围临界 (-1,0) 点,即极坐标图与实轴的截距大于 1:
,如图 7.10b 的伯德图所示。
3)图 7.10c 中的临界稳定情况:极坐标图与实轴相交于 (-1,0) 点,即极坐标图与实轴的截距等于 1:,如图 7.10c 的伯德图所示。
4、相对稳定性
通过将奈奎斯特准则应用于环路增益来确定绝对稳定性。稳定环路增益的极坐标图未包围(-1,0)点。但增加环路增益或相位延迟都会导致极坐标图不满足奈奎斯特稳定性准则。图7.14显示了增加环路增益或相位延迟对极坐标图的影响。
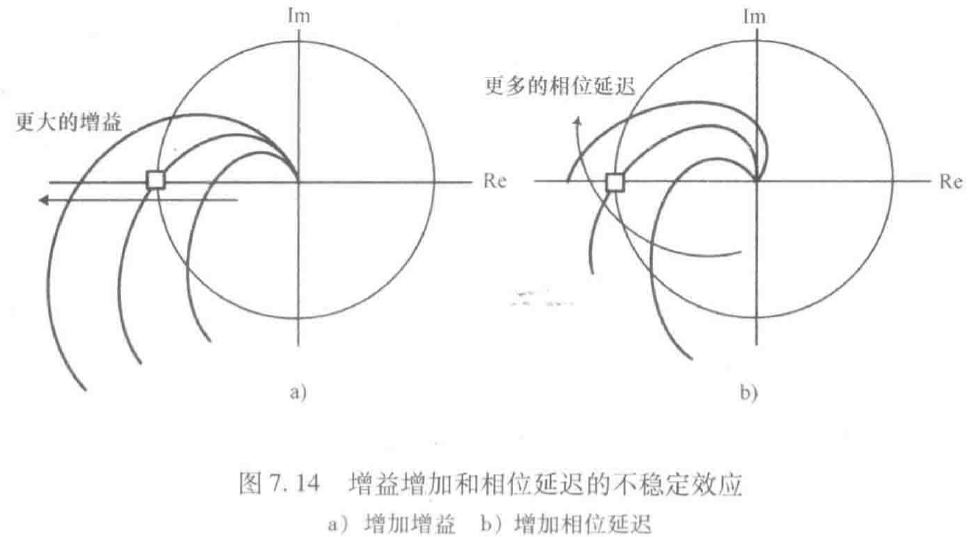
1)带固定相位延迟的增益增加导致极坐标图的比例扩展。如图7.14所示连续增加增益最终会导致极坐标图包围(-1,0)点,使系统不稳定。
2)带固定增益的相位延迟增加会导致极坐标图的顺时针旋转。如图7.14b所示,过大的相位延迟也会包围(-1,0)点。
因为增加环路增益幅值或相位延迟均会使系统不稳定,所以需要由增益裕度和相位裕度来保证相对稳定性。
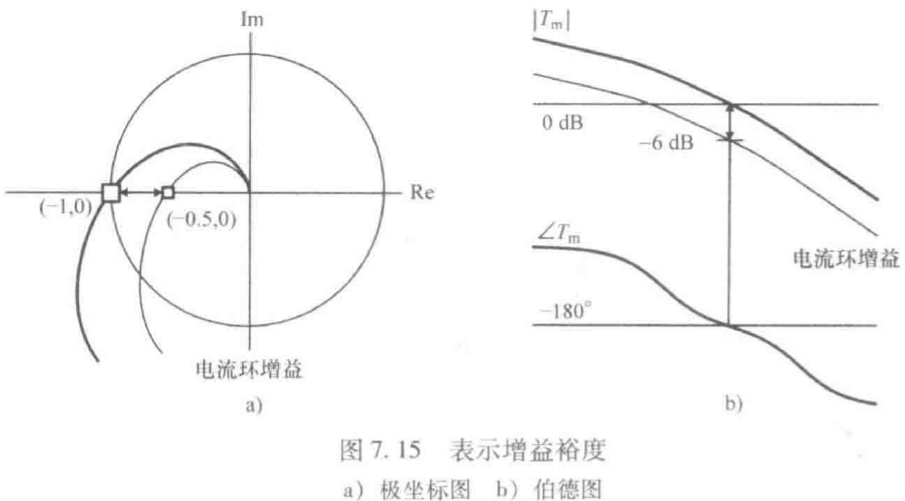
增益裕度 :增益裕度定义为闭环系统趋于不稳定前,到 增益的增加值,其中频率响应的相位不变。增益裕度如图 7.15 所示。图 7.15a 表示极坐标图越过 (-0.5,0) 点。如图中粗线所示,当环路增益加倍时,极坐标图将通过 (-1,0) 点,增益裕度由
给出。图 7.15b 是相同环路增益的伯德图,在频率
降至
时,
,伯德图预测了增益裕度是
。如图中粗线所示,当
提高
时,
,
,表示极坐标图通过 (-1,0) 点。
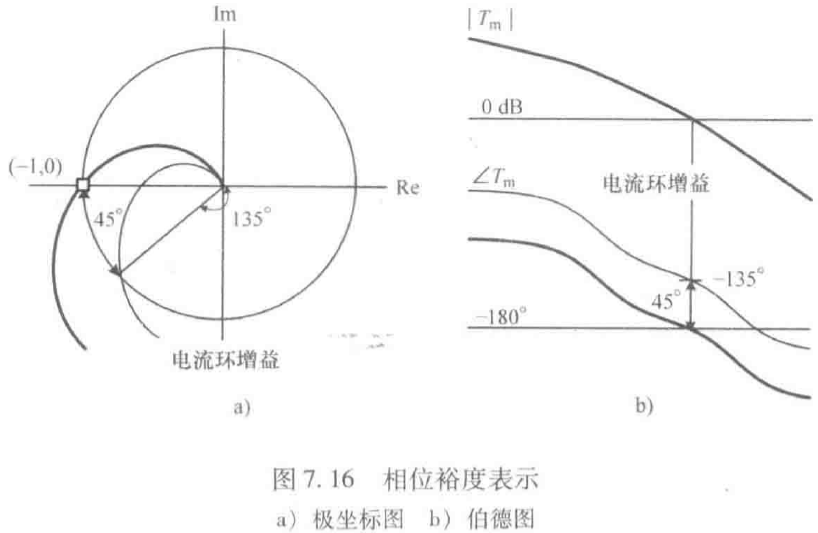
相位裕度 :相位裕度表示系统保持稳定的情况下,保持 不变,
增加的相位延迟量。图 7.16 显示了具有 45\^\\circ 相位裕度的环路增益曲线。图 7.16a 表示极坐标图与
相位角的单位圆相交。当极坐标图沿顺时针方向旋转
时,极坐标图通过 (-1,0) 点,系统不稳定。如图 7.16b 所示,当
曲线穿过
线时,
。如果
降低
,环路增益
,
,系统为临界稳定。
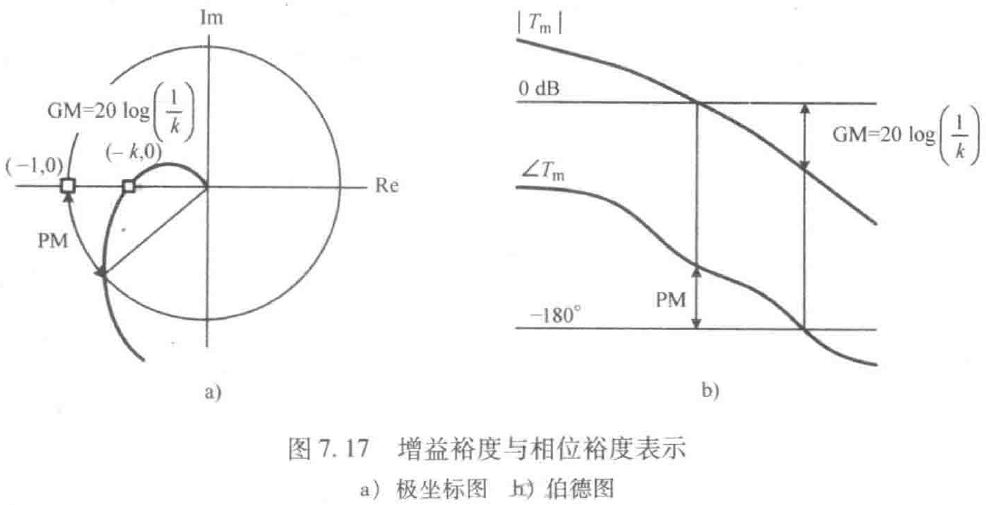
路增益如图 7.17 所示。图 7.17a 为极坐标图上的增益裕度和相位裕度。
1)增益裕度 :增益裕度指极坐标图通过实轴的点与 (-1,0) 点之间的距离。当极坐标图通过 (-k,0) 点时,增益裕度是
。
2)相位裕度 :相位裕度是极坐标图与单位圆相交的点到原点的连线与实轴的夹角。
图 7.17b 是增益裕度与相位裕度的伯德图。
1)增益裕度 :增益裕度指在
降至
时,
和
之间的差值。
2)相位裕度 :相位裕度指在
降至
时,
和
的差值。
由图 7.17 可知,临界稳定系统的增益裕度和相位裕度都降为零,而不稳定系统的增益裕度和相位裕度是负值。
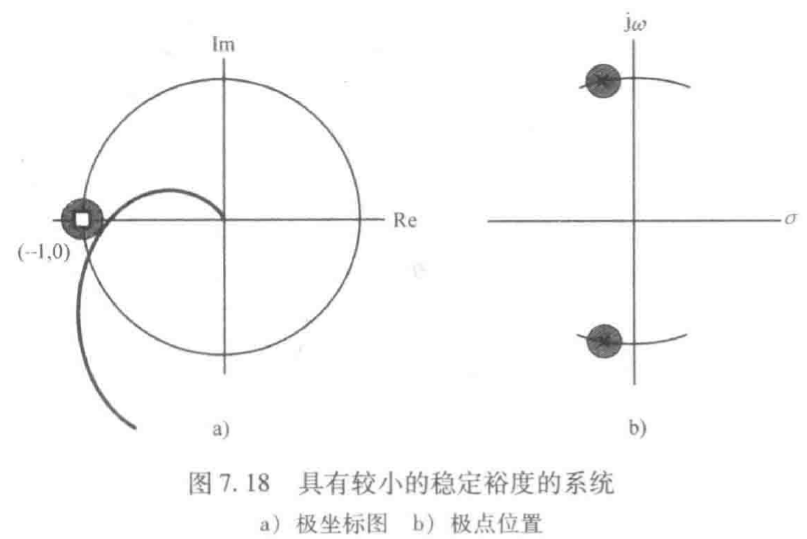
**尽管稳定裕度最初是用于对稳定性的量化,但也可作为闭环控制系统的频域与时域的性能指标。**稳定裕度与动态性能之间的关系是基于以下参数的:从相对稳定性的定义可知,稳定裕度表示极坐标图与实轴的交点到(-1,0)点的距离。当极坐标图通过(-1,0)点时,系统处于临界稳定,稳定裕度减小到零。当极坐标图绕过(-1,0)点,靠近但不包围(-1,0)点时,系统的稳定裕度很小,几乎不稳定。如图7.18所示,尽管系统极点在s平面的LHP中,但它靠近虚轴。