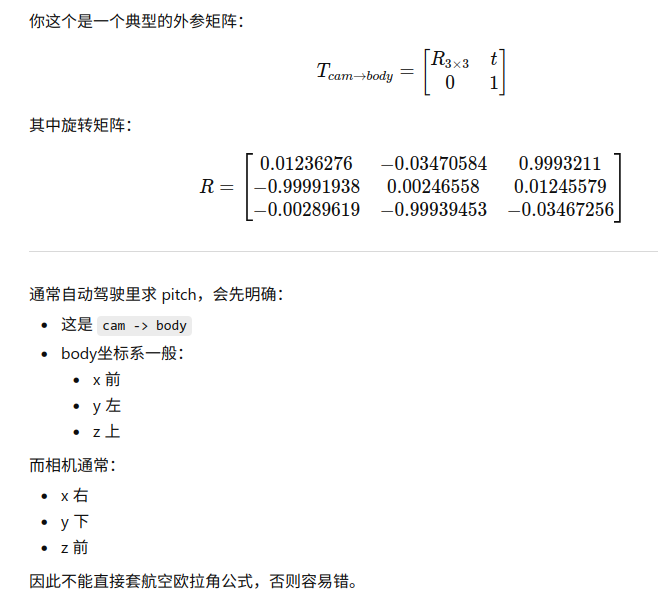
0.01236276, -0.03470584, 0.9993211, 2.052727
-0.99991938, 0.00246558, 0.01245579, -0.0054
-0.00289619, -0.99939453, -0.03467256, 1.4633291
0.0, 0.0, 0.0, 1.0
最终结论
这个相机:
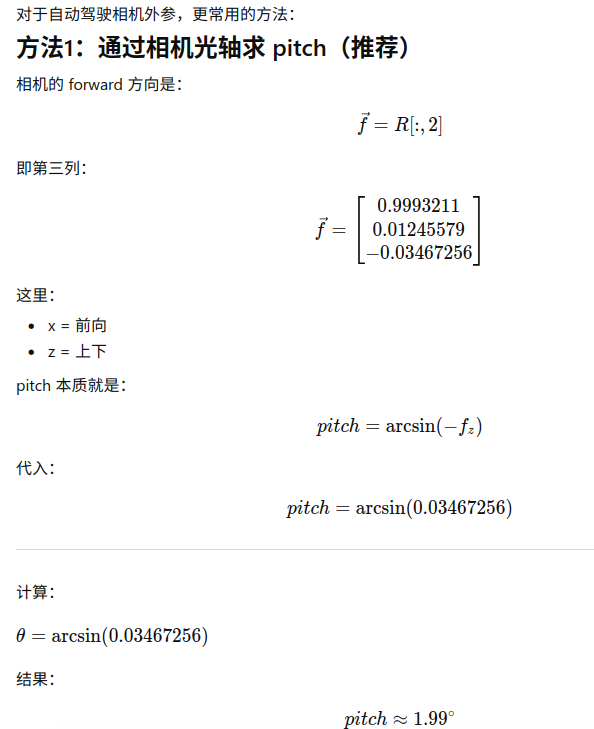
pitch ≈ +2.0°
表示:pitch角度正,相机向下。右手大拇指向左,和y轴方向一样,四指向下,向下为正。
相机略微向下俯视(自动驾驶非常常见)
import numpy as np
R = np.array([
[ 0.01236276, -0.03470584, 0.9993211 ],
[-0.99991938, 0.00246558, 0.01245579],
[-0.00289619, -0.99939453, -0.03467256]
])
forward = R[:, 2]
pitch = np.arcsin(-forward[2]) * 180 / np.pi
print(pitch)
#1.986°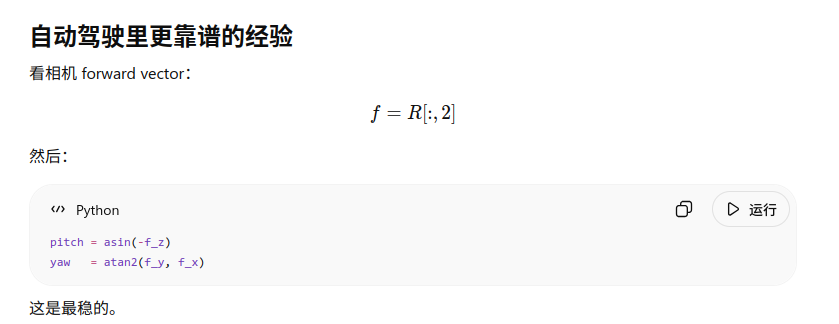
pitch = asin(-f_z)
yaw = atan2(f_y, f_x)