本教程基于 IsaacLab,从零实现了 7轴机械臂的遥操作与数据采集流程,在 IsaacLab 环境中实现了 PiPER、NERO 机械臂的方块堆叠任务,支持键盘控制完成任务、获取方块位置完成任务,可以通过遥操作进行人类演示数据的采集与回放。
项目支持:
-
键盘控制机械臂完成任务
-
方块堆叠(Pick and Place)任务
-
人类演示数据采集(Demonstration Collection)
-
遥操作数据回放
-
PiPER与NERO 机械臂适配
该方案适用于:
-
具身智能数据采集
-
模仿学习(Imitation Learning)
-
Manipulation任务开发
-
IsaacLab强化学习环境搭建
-
机械臂遥操作研究
项目仓库
https://github.com/szyzp/IsaacLab_Data_Collection.git
前情提要
松灵技术生态|IsaacLab中实现松灵PIPER机械臂键盘遥操作与数据采集教程-CSDN博客
环境配置
1、Nero 环境配置
1.1 配置 Nero 的 usd 文件
1.1.1 获取 Nero 的 URDF 文件
将source/agx_teleop/agx_description/agx_arm_urdf/nero中的nero_description.urdf、nero_with_gripper_flange_description.xacro和nero_with_gripper_description.xacro文件合并为单个 URDF 文件nero_gripper.urdf。修改合并后的nero_gripper.urdf中的meshes路径格式(原本为ros包的路径格式)。完整的 nero URDF 文件内容如下:
<?xml version="1.0" ?>
<robot name="agx_arm">
<link name="world"/>
<joint name="world_to_base_link" type="fixed">
<parent link="world"/>
<child link="base_link"/>
<origin rpy="0 0 3.14" xyz="0 0 0"/>
</joint>
<link name="base_link">
<inertial>
<origin rpy="0 0 0" xyz="-0.00319465997 -0.00005467608 0.04321758463"/>
<mass value="1.06458435"/>
<inertia ixx="0.00102659855152" ixy="0.00000186219753" ixz="-0.00000295298037" iyy="0.00114399299508" iyz="-0.00000078763492" izz="0.00090872933022"/>
</inertial>
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="../meshes/dae/base_link.dae"/>
</geometry>
</visual>
<collision>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="../meshes/base_link.stl"/>
</geometry>
</collision>
</link>
<link name="link1">
<inertial>
<origin rpy="0 0 0" xyz="-0.00076810578 -0.00005718031 -0.00686372765"/>
<mass value="0.76710504"/>
<inertia ixx="0.00066689512233" ixy="0.00000273938306" ixz="0.00001463284987" iyy="0.00054501235592" iyz="0.00000183168344" izz="0.00051509465737"/>
</inertial>
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="../meshes/dae/link1.dae"/>
</geometry>
</visual>
<collision>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="../meshes/link1.stl"/>
</geometry>
</collision>
</link>
<joint name="joint1" type="revolute">
<origin rpy="0 0 0" xyz="0 0 0.138"/>
<parent link="base_link"/>
<child link="link1"/>
<axis xyz="0 0 1"/>
<limit effort="100" lower="-2.70526" upper="2.70526" velocity="5"/>
</joint>
<link name="link2">
<inertial>
<origin rpy="0 0 0" xyz="0.00079686657 -0.07890325930 0.00111849422"/>
<mass value="0.69381908"/>
<inertia ixx="0.00201093857656" ixy="-0.00002399426785" ixz="-0.00000072824714" iyy="0.00063544232555" iyz="0.00005831284343" izz="0.00181943989593"/>
</inertial>
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="../meshes/dae/link2.dae"/>
</geometry>
</visual>
<collision>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="../meshes/link2.stl"/>
</geometry>
</collision>
</link>
<joint name="joint2" type="revolute">
<origin rpy="1.5707963 3.1415926 0" xyz="0 0 0"/>
<parent link="link1"/>
<child link="link2"/>
<axis xyz="0 0 1"/>
<limit effort="100" lower="-1.74" upper="1.74" velocity="5"/>
</joint>
<link name="link3">
<inertial>
<origin rpy="0 0 0" xyz="0.00014513363 -0.00121378766 -0.04861136795"/>
<mass value="0.67246544"/>
<inertia ixx="0.00343229961910" ixy="-0.00000026976739" ixz="0.00000305078107" iyy="0.00338662526897" iyz="-0.00003550220027" izz="0.00028853579710"/>
</inertial>
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="../meshes/dae/link3.dae"/>
</geometry>
</visual>
<collision>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="../meshes/link3.stl"/>
</geometry>
</collision>
</link>
<joint name="joint3" type="revolute">
<origin rpy="-1.5707963 0 3.1415926926" xyz="0 -0.31 0"/>
<parent link="link2"/>
<child link="link3"/>
<axis xyz="0 0 1"/>
<limit effort="100" lower="-2.75" upper="2.75" velocity="5"/>
</joint>
<link name="link4">
<inertial>
<origin rpy="0 0 0" xyz="-0.00031334623 -0.05675192422 0.00076056133"/>
<mass value="0.48451414"/>
<inertia ixx="0.00050386693505" ixy="-0.00000529675237" ixz="0.00000006134740" iyy="0.00023502068202" iyz="0.00001815932566" izz="0.00040149523118"/>
</inertial>
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="../meshes/dae/link4.dae"/>
</geometry>
</visual>
<collision>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="../meshes/link4.stl"/>
</geometry>
</collision>
</link>
<joint name="joint4" type="revolute">
<origin rpy="-1.5707963 0 3.1415926926" xyz="0 0 0"/>
<parent link="link3"/>
<child link="link4"/>
<axis xyz="0 0 1"/>
<limit effort="100" lower="-1.01" upper="2.14" velocity="5"/>
</joint>
<link name="link5">
<inertial>
<origin rpy="0 0 0" xyz="0.00265591357 0.00201195753 -0.11620855434"/>
<mass value="0.58368405"/>
<inertia ixx="0.00089537686723" ixy="0.00000648218232" ixz="-0.00001463346849" iyy="0.00085866122972" iyz="-0.00004035185637" izz="0.00021774946532"/>
</inertial>
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="../meshes/dae/link5.dae"/>
</geometry>
</visual>
<collision>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="../meshes/link5.stl"/>
</geometry>
</collision>
</link>
<joint name="joint5" type="revolute">
<origin rpy="1.5707963 -1.5707963 0" xyz="0 -0.27001 0"/>
<parent link="link4"/>
<child link="link5"/>
<axis xyz="0 0 1"/>
<limit effort="100" lower="-2.75" upper="2.75" velocity="5"/>
</joint>
<link name="link6">
<inertial>
<origin rpy="0 0 0" xyz="0.00009501505 0.00107831174 -0.00019110990"/>
<mass value="0.3140406"/>
<inertia ixx="0.00006027211661" ixy="-0.00000024650903" ixz="0.00000015701294" iyy="0.00004699514792" iyz="0.00000004170875" izz="0.00005756771792"/>
</inertial>
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="../meshes/dae/link6.dae"/>
</geometry>
</visual>
<collision>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="../meshes/link6.stl"/>
</geometry>
</collision>
</link>
<joint name="joint6" type="revolute">
<origin rpy="1.5707963 -1.5707963 0" xyz="0 0 0"/>
<parent link="link5"/>
<child link="link6"/>
<axis xyz="0 0 1"/>
<limit effort="100" lower="-0.73" upper="0.95" velocity="5"/>
</joint>
<link name="link7">
<inertial>
<origin rpy="0 0 0" xyz="-0.00014000 -0.00010000 -0.00275000"/>
<mass value="0.000001"/>
<inertia ixx="1.1000000000000001e-07" ixy="0" ixz="0" iyy="1.1000000000000001e-07" iyz="0" izz="1.9999999999999999e-07"/>
</inertial>
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="../meshes/dae/link7.dae"/>
</geometry>
</visual>
<collision>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="../meshes/link7.stl"/>
</geometry>
</collision>
</link>
<joint name="joint7" type="revolute">
<origin rpy="1.5707963 0 0" xyz="0 -0.0235 0"/>
<parent link="link6"/>
<child link="link7"/>
<axis xyz="0 0 1"/>
<limit effort="100" lower="-1.5707963" upper="1.5707963" velocity="5"/>
</joint>
<link name="gripper_flange">
<inertial>
<origin rpy="0 0 0" xyz="0.0 0.0 -0.00032"/>
<mass value="0.04771096"/>
<inertia ixx="2.697e-05" ixy="0" ixz="0" iyy="4.311e-05" iyz="0" izz="2.479e-05"/>
</inertial>
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="../meshes/dae/gripper_flange.dae"/>
</geometry>
</visual>
<collision>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="../meshes/gripper_flange.stl"/>
</geometry>
</collision>
</link>
<joint name="gripper_flange_joint" type="fixed">
<origin rpy="-1.5708 0 -1.5708" xyz="0.032 0 -0.0235"/>
<parent link="link7"/>
<child link="gripper_flange"/>
</joint>
<link name="gripper_base">
<inertial>
<origin rpy="0 0 0" xyz="-0.000183807162235591 8.05033155577911E-05 0.0321436689908876"/>
<mass value="0.45"/>
<inertia ixx="0.00092934" ixy="0.00000034" ixz="-0.00000738" iyy="0.00071447" iyz="0.00000005" izz="0.00039442"/>
</inertial>
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="../meshes/dae/gripper_base.dae"/>
</geometry>
</visual>
<collision>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="../meshes/gripper_base.stl"/>
</geometry>
</collision>
</link>
<joint name="gripper_base_joint" type="fixed">
<origin rpy="0 0 0" xyz="0 0 0.0055"/>
<parent link="gripper_flange"/>
<child link="gripper_base"/>
</joint>
<link name="gripper_link1">
<inertial>
<origin rpy="0 0 0" xyz="0.00065123185041968 -0.0491929869131989 0.00972258769184025"/>
<mass value="0.025"/>
<inertia ixx="0.00007371" ixy="-0.00000113" ixz="0.00000021" iyy="0.00000781" iyz="-0.00001372" izz="0.0000747"/>
</inertial>
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="../meshes/dae/gripper_link1.dae"/>
</geometry>
</visual>
<collision>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="../meshes/gripper_link1.stl"/>
</geometry>
</collision>
</link>
<joint name="gripper_joint1" type="prismatic">
<origin rpy="1.5707963 0 3.1415926" xyz="0 0 0.1358"/>
<parent link="gripper_base"/>
<child link="gripper_link1"/>
<axis xyz="0 0 1"/>
<limit effort="10" lower="0" upper="0.05" velocity="3"/>
</joint>
<link name="gripper_link2">
<inertial>
<origin rpy="0 0 0" xyz="0.00065123185041968 -0.0491929869131989 0.00972258769184025"/>
<mass value="0.025"/>
<inertia ixx="0.00007371" ixy="-0.00000113" ixz="0.00000021" iyy="0.00000781" iyz="-0.00001372" izz="0.0000747"/>
</inertial>
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="../meshes/dae/gripper_link2.dae"/>
</geometry>
</visual>
<collision>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="../meshes/gripper_link2.stl"/>
</geometry>
</collision>
</link>
<joint name="gripper_joint2" type="prismatic">
<origin rpy="1.5707963 0 0" xyz="0 0 0.1358"/>
<parent link="gripper_base"/>
<child link="gripper_link2"/>
<axis xyz="0 0 -1"/>
<limit effort="10" lower="-0.05" upper="0" velocity="3"/>
</joint>
</robot>1.1.2 获取 Nero 的 USD 文件
转换 Nero 的 URDF 文件为 USD 文件 使用 isaaclab 自带的转换脚本 scripts/tools/convert_urdf.py,命令如下:
python ../IsaacLab/scripts/tools/convert_urdf.py \
/home/agilex/isaac-cosmos/agx_teleop/source/agx_teleop/agx_description/agx_arm_urdf/nero/urdf/nero_gripper.urdf \
/home/agilex/isaac-cosmos/agx_teleop/source/agx_teleop/agx_description/agx_arm_urdf/nero/usd/nero.usd \
--fix-base 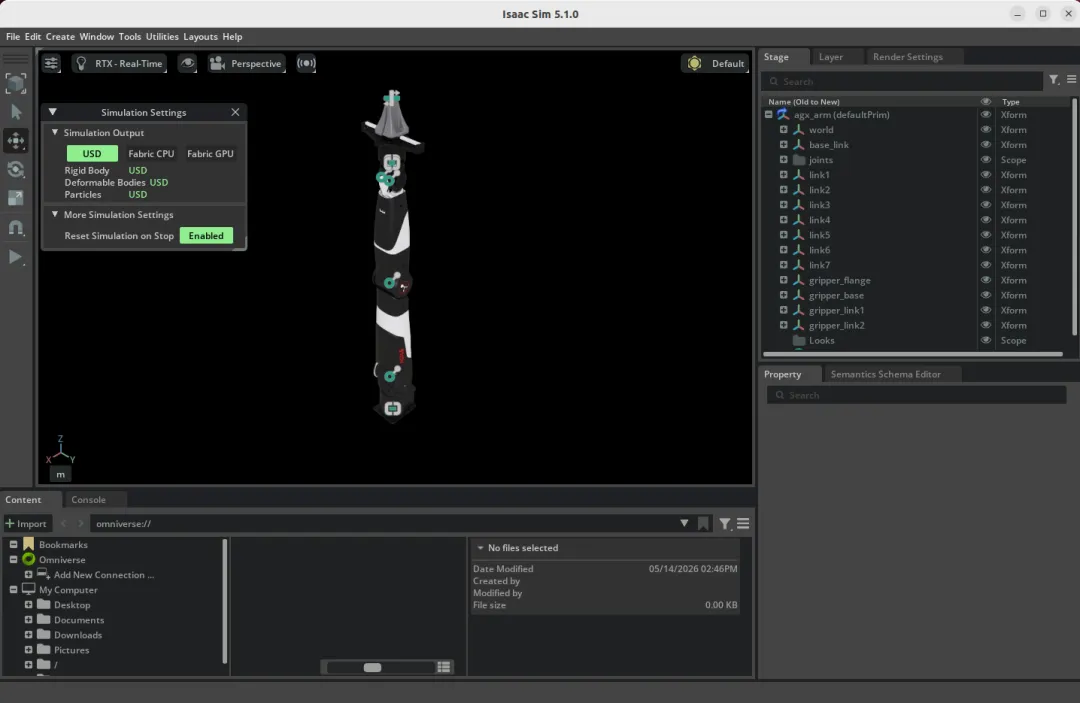
1.1.3 nero 配置文件
创建 assets/nero.py 文件,内容如下:
import isaaclab.sim as sim_utils
from isaaclab.actuators import ImplicitActuatorCfg
from isaaclab.assets.articulation import ArticulationCfg
from agx_teleop.assets import AGX_TELEOP_DESCRIPTION_DIR
##
# Configuration
##
NERO_GRIPPER_CFG = ArticulationCfg(
spawn=sim_utils.UsdFileCfg(
usd_path=f"{AGX_TELEOP_DESCRIPTION_DIR}/agx_arm_urdf/nero/usd/nero.usd",
rigid_props=sim_utils.RigidBodyPropertiesCfg(
disable_gravity=False,
max_depenetration_velocity=5.0,
),
articulation_props=sim_utils.ArticulationRootPropertiesCfg(
enabled_self_collisions=False, solver_position_iteration_count=8, solver_velocity_iteration_count=0
),
),
init_state=ArticulationCfg.InitialStateCfg(
rot=(1.0, 0.0, 0.0, 0.0),
joint_pos={
"joint1": 0.0,
"joint2": 0.0,
"joint3": 0.0,
"joint4": 1.22,
"joint5": 0.0,
"joint6": 0.0,
"joint7": 1.31,
"gripper_joint1": 0.05,
"gripper_joint2": -0.05
},
# Set initial joint velocities to zero
joint_vel={".*": 0.0},
),
actuators={
"arm": ImplicitActuatorCfg(
joint_names_expr=["joint.*"],
effort_limit=25.0, # 稍微限制出力,防止瞬间冲击
velocity_limit=1.5,
# 刚度 (Stiffness)
stiffness={
"joint1": 200.0,
"joint2": 170.0,
"joint3": 120.0,
"joint4": 80.0,
"joint5": 50.0,
"joint6": 20.0,
"joint7": 10.0
},
# 阻尼 (Damping):采用临界阻尼思路,比例设在 10% 左右
damping={
"joint1": 100.0,
"joint2": 60.0,
"joint3": 70.0,
"joint4": 24.0,
"joint5": 20.0,
"joint6": 10.0,
"joint7": 5,
},
),
"gripper": ImplicitActuatorCfg(
joint_names_expr=["gripper_joint1","gripper_joint2"],
effort_limit_sim=22,
velocity_limit_sim=1.5,
stiffness=800.0,
damping=20.0,
),
},
soft_joint_pos_limit_factor=0.9,
)
NERO_GRIPPER_HIGH_PD_CFG = NERO_GRIPPER_CFG.copy()
NERO_GRIPPER_HIGH_PD_CFG.spawn.rigid_props.disable_gravity = True2、任务环境配置
2.1 配置项目结构
参考isaaclab官方代码进行修改:isaaclab/source/isaaclab_tasks/isaaclab_tasks/manager_based/manipulation/stack
cd agx_teleop
mkdir -p source/agx_teleop/agx_teleop/tasks/manager_based/manipulation/stack/config/nero/agents/robomimic创建以下文件:
manipulation/stack/config/nero/__init__.py
manipulation/stack/config/nero/agents/__init__.py
manipulation/stack/config/nero/agents/robomimic/bc_rnn_low_dim.json
manipulation/stack/config/nero/nero_stack_ik_rel_env_cfg.py
manipulation/stack/config/nero/nero_stack_joint_pos_env_cfg.py创建命令:
cd source/agx_teleop/agx_teleop/tasks/manager_based/
touch manipulation/stack/config/nero/__init__.py \
manipulation/stack/config/nero/agents/__init__.py \
manipulation/stack/config/nero/agents/robomimic/bc_rnn_low_dim.json \
manipulation/stack/config/nero/nero_stack_ik_rel_env_cfg.py \
manipulation/stack/config/nero/nero_stack_joint_pos_env_cfg.py2.2 修改文件
2.2.1 stack/config/nero/agents/robomimic/bc_rnn_low_dim.json
复制isaaclab对应代码,无需修改。
bc_rnn_low_dim.json:
{
"algo_name": "bc",
"experiment": {
"name": "bc_rnn_low_dim_franka_stack",
"validate": false,
"logging": {
"terminal_output_to_txt": true,
"log_tb": true
},
"save": {
"enabled": true,
"every_n_seconds": null,
"every_n_epochs": 100,
"epochs": [],
"on_best_validation": false,
"on_best_rollout_return": false,
"on_best_rollout_success_rate": true
},
"epoch_every_n_steps": 100,
"env": null,
"additional_envs": null,
"render": false,
"render_video": false,
"rollout": {
"enabled": false
}
},
"train": {
"data": null,
"num_data_workers": 4,
"hdf5_cache_mode": "all",
"hdf5_use_swmr": true,
"hdf5_normalize_obs": false,
"hdf5_filter_key": null,
"hdf5_validation_filter_key": null,
"seq_length": 10,
"dataset_keys": [
"actions"
],
"goal_mode": null,
"cuda": true,
"batch_size": 100,
"num_epochs": 2000,
"seed": 101
},
"algo": {
"optim_params": {
"policy": {
"optimizer_type": "adam",
"learning_rate": {
"initial": 0.001,
"decay_factor": 0.1,
"epoch_schedule": [],
"scheduler_type": "multistep"
},
"regularization": {
"L2": 0.0
}
}
},
"loss": {
"l2_weight": 1.0,
"l1_weight": 0.0,
"cos_weight": 0.0
},
"actor_layer_dims": [],
"gmm": {
"enabled": true,
"num_modes": 5,
"min_std": 0.0001,
"std_activation": "softplus",
"low_noise_eval": true
},
"rnn": {
"enabled": true,
"horizon": 10,
"hidden_dim": 400,
"rnn_type": "LSTM",
"num_layers": 2,
"open_loop": false,
"kwargs": {
"bidirectional": false
}
}
},
"observation": {
"modalities": {
"obs": {
"low_dim": [
"eef_pos",
"eef_quat",
"gripper_pos",
"object"
],
"rgb": [],
"depth": [],
"scan": []
}
}
}
}2.2.2 stack/config/nero/nero_stack_joint_pos_env_cfg.py
复制isaaclab对应代码,修改如下内容:
-
修改stack相关和nero配置的导入。
-
修改类、函数和变量的名称。
-
修改 nero 机械臂的默认位姿。
-
修改夹爪部分。
-
修改 ee_frame 设置部分。
完整代码 nero_stack_joint_pos_env_cfg.py:
# Copyright (c) 2022-2026, The Isaac Lab Project Developers (https://github.com/isaac-sim/IsaacLab/blob/main/CONTRIBUTORS.md).
# All rights reserved.
#
# SPDX-License-Identifier: BSD-3-Clause
from isaaclab.assets import RigidObjectCfg
from isaaclab.managers import EventTermCfg as EventTerm
from isaaclab.managers import SceneEntityCfg
from isaaclab.sensors import FrameTransformerCfg
from isaaclab.sensors.frame_transformer.frame_transformer_cfg import OffsetCfg
from isaaclab.sim.schemas.schemas_cfg import RigidBodyPropertiesCfg
from isaaclab.sim.spawners.from_files.from_files_cfg import UsdFileCfg
from isaaclab.utils import configclass
from isaaclab.utils.assets import ISAAC_NUCLEUS_DIR
from agx_teleop.tasks.manager_based.manipulation.stack import mdp
from agx_teleop.tasks.manager_based.manipulation.stack.mdp import piper_stack_events
from agx_teleop.tasks.manager_based.manipulation.stack.stack_env_cfg import StackEnvCfg
##
# Pre-defined configs
##
from isaaclab.markers.config import FRAME_MARKER_CFG # isort: skip
from agx_teleop.assets.nero import NERO_GRIPPER_CFG # isort: skip
@configclass
class EventCfg:
"""Configuration for events."""
init_nero_arm_pose = EventTerm(
func=piper_stack_events.set_default_joint_pose,
mode="reset",
params={
"default_pose": [0.0, 0.0, 0.0, 1.22, 0.0, 0.0, 1.31, 0.05, -0.05], # 7机械臂+2夹爪,夹爪打开
},
)
randomize_nero_joint_state = EventTerm(
func=piper_stack_events.randomize_joint_by_gaussian_offset,
mode="reset",
params={
"mean": 0.0,
"std": 0.02,
"asset_cfg": SceneEntityCfg("robot"),
},
)
randomize_cube_positions = EventTerm(
func=piper_stack_events.randomize_object_pose,
mode="reset",
params={
"pose_range": {"x": (0.3, 0.5), "y": (-0.10, 0.10), "z": (0.0203, 0.0203), "yaw": (-1.0, 1, 0)},
"min_separation": 0.12,
"asset_cfgs": [SceneEntityCfg("cube_1"), SceneEntityCfg("cube_2"), SceneEntityCfg("cube_3")],
},
)
@configclass
class NeroCubeStackEnvCfg(StackEnvCfg):
"""Configuration for the Nero Cube Stack Environment."""
def __post_init__(self):
# post init of parent
super().__post_init__()
# Set events
self.events = EventCfg()
# Set Nero as robot
self.scene.robot = NERO_GRIPPER_CFG.replace(prim_path="{ENV_REGEX_NS}/Robot")
self.scene.robot.spawn.semantic_tags = [("class", "robot")]
# Add semantics to table
self.scene.table.spawn.semantic_tags = [("class", "table")]
# Add semantics to ground
self.scene.plane.semantic_tags = [("class", "ground")]
# Set actions for the specific robot type (nero)
self.actions.arm_action = mdp.JointPositionActionCfg(
asset_name="robot", joint_names=["joint.*"], scale=0.5, use_default_offset=True
)
self.actions.gripper_action = mdp.BinaryJointPositionActionCfg(
asset_name="robot",
joint_names=["gripper_joint.*"],
open_command_expr={
"gripper_joint1": 0.05,
"gripper_joint2": -0.05,
},
close_command_expr={
"gripper_joint1": 0.0,
"gripper_joint2": 0.0,
},
)
# utilities for gripper status check
self.gripper_joint_names = ["gripper_joint.*"]
self.gripper_open_val = [0.05, -0.05]
self.gripper_threshold = 0.005
# Rigid body properties of each cube
cube_properties = RigidBodyPropertiesCfg(
solver_position_iteration_count=16,
solver_velocity_iteration_count=1,
max_angular_velocity=1000.0,
max_linear_velocity=1000.0,
max_depenetration_velocity=5.0,
disable_gravity=False,
)
# Set each stacking cube deterministically
self.scene.cube_1 = RigidObjectCfg(
prim_path="{ENV_REGEX_NS}/Cube_1",
init_state=RigidObjectCfg.InitialStateCfg(pos=[0.4, 0.0, 0.0203], rot=[1, 0, 0, 0]),
spawn=UsdFileCfg(
usd_path=f"{ISAAC_NUCLEUS_DIR}/Props/Blocks/blue_block.usd",
scale=(1.0, 1.0, 1.0),
rigid_props=cube_properties,
semantic_tags=[("class", "cube_1")],
),
)
self.scene.cube_2 = RigidObjectCfg(
prim_path="{ENV_REGEX_NS}/Cube_2",
init_state=RigidObjectCfg.InitialStateCfg(pos=[0.55, 0.05, 0.0203], rot=[1, 0, 0, 0]),
spawn=UsdFileCfg(
usd_path=f"{ISAAC_NUCLEUS_DIR}/Props/Blocks/red_block.usd",
scale=(1.0, 1.0, 1.0),
rigid_props=cube_properties,
semantic_tags=[("class", "cube_2")],
),
)
self.scene.cube_3 = RigidObjectCfg(
prim_path="{ENV_REGEX_NS}/Cube_3",
init_state=RigidObjectCfg.InitialStateCfg(pos=[0.60, -0.1, 0.0203], rot=[1, 0, 0, 0]),
spawn=UsdFileCfg(
usd_path=f"{ISAAC_NUCLEUS_DIR}/Props/Blocks/green_block.usd",
scale=(1.0, 1.0, 1.0),
rigid_props=cube_properties,
semantic_tags=[("class", "cube_3")],
),
)
# Listens to the required transforms
marker_cfg = FRAME_MARKER_CFG.copy()
marker_cfg.markers["frame"].scale = (0.1, 0.1, 0.1)
marker_cfg.prim_path = "/Visuals/FrameTransformer"
self.scene.ee_frame = FrameTransformerCfg(
prim_path="{ENV_REGEX_NS}/Robot/world",
debug_vis=False,
visualizer_cfg=marker_cfg,
target_frames=[
FrameTransformerCfg.FrameCfg(
prim_path="{ENV_REGEX_NS}/Robot/gripper_base",
name="end_effector",
offset=OffsetCfg(
pos=[0.0, 0.0, 0.125],
),
),
FrameTransformerCfg.FrameCfg(
prim_path="{ENV_REGEX_NS}/Robot/gripper_link1",
name="tool_rightfinger",
offset=OffsetCfg(
pos=(0.0, 0.0, 0.0),
),
),
FrameTransformerCfg.FrameCfg(
prim_path="{ENV_REGEX_NS}/Robot/gripper_link2",
name="tool_leftfinger",
offset=OffsetCfg(
pos=(0.0, 0.0, 0.0),
),
),
],
)2.2.3 stack/config/nero/nero_stack_ik_rel_env_cfg.py
复制isaaclab对应代码,修改如下内容:
-
修改导入和命名
-
修改末端执行器的偏移量
完整代码 nero_stack_ik_rel_env_cfg.py:
# Copyright (c) 2022-2026, The Isaac Lab Project Developers (https://github.com/isaac-sim/IsaacLab/blob/main/CONTRIBUTORS.md).
# All rights reserved.
#
# SPDX-License-Identifier: BSD-3-Clause
from isaaclab.controllers.differential_ik_cfg import DifferentialIKControllerCfg
from isaaclab.devices.device_base import DeviceBase, DevicesCfg
from isaaclab.devices.keyboard import Se3KeyboardCfg
from isaaclab.devices.openxr.openxr_device import OpenXRDeviceCfg
from isaaclab.devices.openxr.retargeters.manipulator.gripper_retargeter import GripperRetargeterCfg
from isaaclab.devices.openxr.retargeters.manipulator.se3_rel_retargeter import Se3RelRetargeterCfg
from isaaclab.envs.mdp.actions.actions_cfg import DifferentialInverseKinematicsActionCfg
from isaaclab.managers import SceneEntityCfg
from isaaclab.managers import TerminationTermCfg as DoneTerm
from isaaclab.utils import configclass
from agx_teleop.tasks.manager_based.manipulation.stack.stack_env_cfg import mdp
from . import nero_stack_joint_pos_env_cfg
##
# Pre-defined configs
##
from agx_teleop.assets.nero import NERO_GRIPPER_HIGH_PD_CFG # isort: skip
@configclass
class NeroCubeStackEnvCfg(nero_stack_joint_pos_env_cfg.NeroCubeStackEnvCfg):
def __post_init__(self):
# post init of parent
super().__post_init__()
# Set Nero as robot
# We switch here to a stiffer PD controller for IK tracking to be better.
self.scene.robot = NERO_GRIPPER_HIGH_PD_CFG.replace(prim_path="{ENV_REGEX_NS}/Robot")
# Set actions for the specific robot type (nero)
self.actions.arm_action = DifferentialInverseKinematicsActionCfg(
asset_name="robot",
joint_names=["joint.*"],
body_name="gripper_base",
controller=DifferentialIKControllerCfg(command_type="pose", use_relative_mode=True, ik_method="dls"),
scale=0.5,
body_offset=DifferentialInverseKinematicsActionCfg.OffsetCfg(pos=[0.0, 0.0, 0.125]),
)
self.teleop_devices = DevicesCfg(
devices={
"handtracking": OpenXRDeviceCfg(
retargeters=[
Se3RelRetargeterCfg(
bound_hand=DeviceBase.TrackingTarget.HAND_RIGHT,
zero_out_xy_rotation=True,
use_wrist_rotation=False,
use_wrist_position=True,
delta_pos_scale_factor=10.0,
delta_rot_scale_factor=10.0,
sim_device=self.sim.device,
),
GripperRetargeterCfg(
bound_hand=DeviceBase.TrackingTarget.HAND_RIGHT, sim_device=self.sim.device
),
],
sim_device=self.sim.device,
xr_cfg=self.xr,
),
"keyboard": Se3KeyboardCfg(
pos_sensitivity=0.05,
rot_sensitivity=0.05,
sim_device=self.sim.device,
),
}
)
@configclass
class NeroCubeStackRedGreenEnvCfg(NeroCubeStackEnvCfg):
def __post_init__(self):
# post init of parent
super().__post_init__()
self.terminations.success = DoneTerm(
func=mdp.cubes_stacked,
params={"cube_1_cfg": SceneEntityCfg("cube_2"), "cube_2_cfg": SceneEntityCfg("cube_3"), "cube_3_cfg": None},
)
@configclass
class NeroCubeStackRedGreenBlueEnvCfg(NeroCubeStackEnvCfg):
def __post_init__(self):
# post init of parent
super().__post_init__()
self.terminations.success = DoneTerm(
func=mdp.cubes_stacked,
params={
"cube_1_cfg": SceneEntityCfg("cube_2"),
"cube_2_cfg": SceneEntityCfg("cube_3"),
"cube_3_cfg": SceneEntityCfg("cube_1"),
},
)
@configclass
class NeroCubeStackBlueGreenEnvCfg(NeroCubeStackEnvCfg):
def __post_init__(self):
# post init of parent
super().__post_init__()
self.terminations.success = DoneTerm(
func=mdp.cubes_stacked,
params={"cube_1_cfg": SceneEntityCfg("cube_1"), "cube_2_cfg": SceneEntityCfg("cube_3"), "cube_3_cfg": None},
)
@configclass
class NeroCubeStackBlueGreenRedEnvCfg(NeroCubeStackEnvCfg):
def __post_init__(self):
# post init of parent
super().__post_init__()
self.terminations.success = DoneTerm(
func=mdp.cubes_stacked,
params={
"cube_1_cfg": SceneEntityCfg("cube_1"),
"cube_2_cfg": SceneEntityCfg("cube_3"),
"cube_3_cfg": SceneEntityCfg("cube_2"),
},
)2.2.4 stack/config/nero/init.py
# Copyright (c) 2022-2026, The Isaac Lab Project Developers (https://github.com/isaac-sim/IsaacLab/blob/main/CONTRIBUTORS.md).
# All rights reserved.
#
# SPDX-License-Identifier: BSD-3-Clause
import gymnasium as gym
# from isaaclab_tasks.manager_based.manipulation.stack.config.franka import agents
from agx_teleop.tasks.manager_based.manipulation.stack.config.nero import agents
##
# Register Gym environments.
##
gym.register(
id="Isaac-Stack-Cube-Nero-IK-Rel-v0",
entry_point="isaaclab.envs:ManagerBasedRLEnv",
kwargs={
"env_cfg_entry_point": f"{__name__}.nero_stack_ik_rel_env_cfg:NeroCubeStackEnvCfg",
"robomimic_bc_cfg_entry_point": f"{agents.__name__}:robomimic/bc_rnn_low_dim.json",
},
disable_env_checker=True,
)3、遥操作收集数据
# 首先创建数据集文件夹
mkdir -p datasets
# 遥操作收集数据命令,此处为键盘遥操作,可选设备:spacemouse, keyboard, handtracking
python scripts/tools/record_demos.py \
--task Isaac-Stack-Cube-Nero-IK-Rel-v0 \
--device cpu --teleop_device keyboard \
--dataset_file ./datasets/nero_dataset.hdf5 \
--num_demos 10
# 回放收集的数据
python scripts/tools/replay_demos.py \
--task Isaac-Stack-Cube-Nero-IK-Rel-v0 \
--device cpu --dataset_file ./datasets/nero_dataset.hdf5keyboard遥操作方法:
Keyboard Controller for SE(3): Se3Keyboard
Reset all commands: R
Toggle gripper (open/close): K
Move arm along x-axis: W/S
Move arm along y-axis: A/D
Move arm along z-axis: Q/E
Rotate arm along x-axis: Z/X
Rotate arm along y-axis: T/G
Rotate arm along z-axis: C/V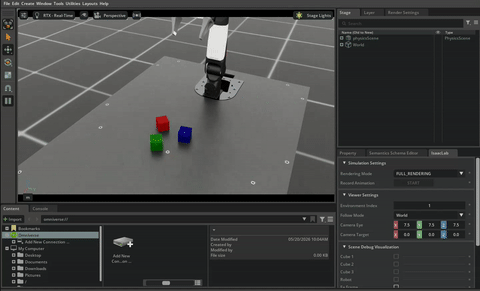
4.FAQ常见问题|IsaacLab机械臂遥操作数据采集高频答疑
Q1:IsaacLab环境中NERO七轴机械臂模型加载失败是什么原因?
常见核心原因包含URDF文件网格路径错误、模型未完成USD格式转换、仿真参数配置异常三类。可通过重新整合URDF与XACRO文件、修正网格资源绝对路径、使用官方脚本重新转换USD格式,同时核对机械臂初始位姿与动力学参数配置,即可解决大部分模型加载失败、资源缺失、渲染异常等问题。
Q2:键盘遥操作时机械臂操控卡顿、轨迹不流畅如何解决?
操控卡顿多由IK逆解参数不合理、环境帧率过低、关节阻尼与刚度参数不匹配导致。可优化SE(3)相对控制配置、微调机械臂关节刚度与阻尼参数,关闭仿真环境多余渲染特效,同时确保Gym环境注册配置正常,有效提升机械臂末端轨迹跟踪精度与操控顺滑度。
Q3:采集的HDF5数据集无法正常回放怎么办?
首先检查数据集存储目录是否规范、采集过程是否完整无中断,其次确认采集脚本与回放脚本版本适配IsaacLab框架版本。若存在异常数据,可剔除无效样本后重新采集,通过标准化回放脚本可视化校验,确保数据集完整性与可用性。
Q4:该数据采集方案是否支持PiPER机械臂直接复用?
支持。本方案原生兼容NERO、PiPER双机械臂设备,仅需替换对应机械臂URDF/USD模型文件,微调设备动力学参数与初始姿态配置,即可快速适配Piper机械臂完成方块堆叠遥操作数据采集任务,无需大规模修改项目源码。
5.结语
本文基于 IsaacLab 平台完成NERO机械臂方块堆叠仿真环境搭建与键盘遥操作数据采集全流程部署,适配标准化仿真开发规范,可快速实现
人工遥操作采集、自动化批量采集、数据集回放校验完整闭环。
方案兼容 松灵七轴机械臂NERO与松灵六轴PiPER机械臂,支持键盘多自由度精准操控,产出的 HDF5数据集贴合真实人工操作特征,有效解决仿真数据真实性低、泛化性差的问题。整体部署简单、复用性强,可直接用于机械臂堆叠操控任务、模仿学习与强化学习算法训练,是机器人仿真数据采集与智能控制迭代的高效实用方案。