1、概述
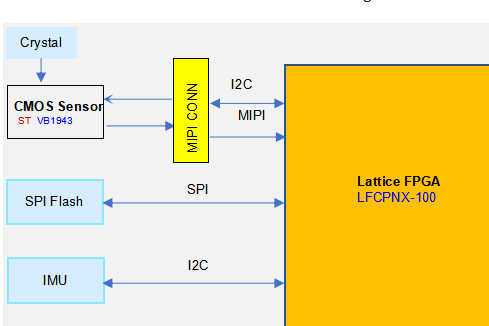
HSB项目中,具有2路I2C外设,一路为cmos sensor RGBIR 图像传感器VB1943,一路为IMU 惯性测量传感器ICM42688,两者在驱动层面相类似,都是通过I2C控制总线读写数据;
2、逻辑流程
3、模块概括
模块中的(5 大核心部分)
-
APB 寄存器映射(RegMap)
-
数据缓冲双口 RAM(Data Buffer)
-
I2C 位层引擎(i2c_ctrl_byte_inst)
-
I2C 事务层 FSM(核心状态机)
-
控制逻辑与状态输出·
这是一个基于 APB 总线**、带寄存器映射 + 数据缓冲 RAM 的 I2C 主机控制器 FSM 模块**,用于通过 CPU 配置 I2C 读写、自动执行多字节 I2C 事务、支持重复起始(Repeated Start)、10bit 地址、多轮事务自动执行。
其中 CPU 通过APB 从机接口进行 寄存器配置 I2C 参数,I2C 主机自动控制器 协议为自动发 START / 地址 / 写 / 重复起始 / 读 / STOP,通过双端口 RAM 数据缓冲区对读写数据实现自动缓存;
// SPDX-FileCopyrightText: Copyright (c) 2023-2024 NVIDIA CORPORATION & AFFILIATES. All rights reserved.
// SPDX-License-Identifier: Apache-2.0
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.
module i2c_ctrl_fsm
import apb_pkg::*;
import regmap_pkg::*;
#(
parameter NUM_INST = 1,
parameter RAM_DEPTH = 128
)
(
// Interface i_aclk(时钟)、i_arst(复位)、APB 总线
input i_aclk,
input i_arst,
input apb_m2s i_apb_m2s,
output apb_s2m o_apb_s2m,
output o_busy,
output [$clog2(NUM_INST)-1:0] o_bus_en,
input i_start,
output [7:0] o_data,
output o_data_valid,
//I2C Ports
input scl_i,
output scl_o,
input sda_i,
output sda_o
);
//------------------------------------------------------------------------------------------------//
// Register Map APB 寄存器映射 CPU 通过 APB 配置以下 6 个控制寄存器 + 1 个状态寄存器
//------------------------------------------------------------------------------------------------//
//寄存器 功能
//ctrl_reg[0] 启动位、10bit 地址使能、设备地址
//ctrl_reg[1] 总线使能(多设备片选)
//ctrl_reg[2] 写字节数 [15:0] + 读字节数 [31:16]
//ctrl_reg[3] I2C 时钟分频(SCL 时钟配置)
//ctrl_reg[4] SCL 超时时间
//ctrl_reg[5] 自动重复执行事务次数
logic [31:0] ctrl_reg [6];
logic [31:0] stat_reg [1];
logic isCtrlAddr;
apb_m2s ctrl_apb_m2s;
apb_s2m ctrl_apb_s2m;
apb_m2s db_apb_m2s;
apb_s2m db_apb_s2m;
localparam [(6*32)-1:0] RST_VAL = {'0,32'h004C_4B40,{(4*32){1'b0}}};
s_apb_reg #(
.N_CTRL ( 6 ),
.N_STAT ( 1 ),
.W_OFST ( w_ofst ),
.RST_VAL ( RST_VAL ),
.SAME_CLK ( 1 )
) u_reg_map (
.i_aclk ( i_aclk ),
.i_arst ( i_arst ),
.i_apb_m2s ( ctrl_apb_m2s ),
.o_apb_s2m ( ctrl_apb_s2m ),
.i_pclk ( i_aclk ),
.i_prst ( i_arst ),
.o_ctrl ( ctrl_reg ),
.i_stat ( stat_reg )
);
logic [15:0] num_wr_bytes ;
logic [15:0] num_rd_bytes ;
logic [9:0] device_address ;
logic [15:0] clk_cnt ;
logic [31:0] i2c_scl_timeout;
logic is_10b_addr ;
logic fsm_start ;
logic i2c_nack ;
logic i2c_al_err ;
logic cmd_valid ;
logic i2c_done ;
logic [7:0] num_trans ;
logic [$clog2(NUM_INST)-1:0] reg_bus_en;
assign fsm_start = ctrl_reg[0][0] && i_start;
assign is_10b_addr = ctrl_reg[0][1];
assign device_address = ctrl_reg[0][25:16];
assign reg_bus_en = ctrl_reg[1][$clog2(NUM_INST):0];
assign num_wr_bytes = ctrl_reg[2][15:0];
assign num_rd_bytes = ctrl_reg[2][31:16];
assign clk_cnt = ctrl_reg[3][15:0];
assign i2c_scl_timeout = ctrl_reg[4];
assign num_trans = ctrl_reg[5][7:0];
assign stat_reg[0][0] = o_busy;
assign stat_reg[0][1] = '0;
assign stat_reg[0][2] = i2c_al_err;
assign stat_reg[0][3] = i2c_nack;
assign stat_reg[0][4] = i2c_done;
assign stat_reg[0][31:5] = '0;
assign ctrl_apb_m2s.psel = (isCtrlAddr && i_apb_m2s.psel);
assign ctrl_apb_m2s.penable = i_apb_m2s.penable;
assign ctrl_apb_m2s.paddr = i_apb_m2s.paddr ;
assign ctrl_apb_m2s.pwdata = i_apb_m2s.pwdata ;
assign ctrl_apb_m2s.pwrite = i_apb_m2s.pwrite ;
assign db_apb_m2s.psel = (!isCtrlAddr && i_apb_m2s.psel);
assign db_apb_m2s.penable = i_apb_m2s.penable;
assign db_apb_m2s.paddr = {24'h0,i_apb_m2s.paddr[7:0]};
assign db_apb_m2s.pwdata = i_apb_m2s.pwdata ;
assign db_apb_m2s.pwrite = i_apb_m2s.pwrite ;
assign o_apb_s2m = (isCtrlAddr) ? ctrl_apb_s2m : db_apb_s2m;
assign o_bus_en = reg_bus_en;
typedef enum logic [3:0] {
I2C_IDLE,
I2C_10b_DEV_ADDR,
I2C_DEV_ADDR,
I2C_WRITE,
I2C_RS_10b_DEV_ADDR,
I2C_RS_DEV_ADDR,
I2C_READ,
I2C_PERI_NACK,
I2C_DONE
} i2c_states;
i2c_states state,state_nxt, state_prev;
//------------------------------------------------------------------------------------------------//
// Data Buffer
//------------------------------------------------------------------------------------------------//
logic db_wr_en;
logic wr_en;
logic [31:0] db_wr_data;
logic [6:0] db_addr;
logic [31:0] db_rd_data;
logic rd_data_valid;
logic [7:0] i2c_db_addr ;
logic [8:0] transaction_cnt ;
logic [8:0] wr_ptr ;
logic [8:0] rd_ptr ;
logic [7:0] i2c_db_data ;
logic [7:0] rd_data ;
logic ack_rise ;
logic cmd_ack_prev;
logic i2c_busy;
logic idle;
logic fsm_done;
logic i2c_al;
logic cmd_ack;
logic read;
logic db_pready;
logic [7:0] trans_cnt;
always_comb begin
db_wr_en = ((db_apb_m2s.psel && db_apb_m2s.penable && db_apb_m2s.pwrite) || (rd_data_valid));
if (o_busy || (fsm_start && (state == I2C_IDLE))) begin
if (cmd_ack && read) begin
db_wr_data = (i2c_db_addr[1:0] == 2'b11) ? {rd_data, db_rd_data[23:0]} :
(i2c_db_addr[1:0] == 2'b10) ? {db_rd_data[31:24], rd_data, db_rd_data[15:0]} :
(i2c_db_addr[1:0] == 2'b01) ? {db_rd_data[31:16], rd_data, db_rd_data[7:0]} :
{db_rd_data[31:8], rd_data} ;
end
else begin
db_wr_data = 8'h0;
end
db_addr = i2c_db_addr[7:2];
end
else begin
db_addr = (db_apb_m2s.paddr[7:2]);
db_wr_data = db_apb_m2s.pwdata;
end
end
assign i2c_db_addr = (state == I2C_WRITE) ? wr_ptr : rd_ptr;
always @(posedge i_aclk) begin
if (i_arst) begin
db_pready <= 1'b0;
end
else begin
db_pready <= (db_apb_m2s.psel && db_apb_m2s.penable);
end
end
//深度:128 × 32bit
//CPU 写入要发送的数据 → RAM
//I2C 读到的数据 → 自动写入 RAM
//CPU 可随时从 RAM 读取结果
dp_ram #(
.DATA_WIDTH ( 32 ),
.RAM_DEPTH ( RAM_DEPTH ),
.RAM_TYPE ( "SIMPLE" ),
.MEM_STYLE ( "BLOCK" )
) data_buffer (
.clk_a ( i_aclk ),
.en_a ( !i_arst ),
.we_a ( db_wr_en ),
.din_a ( db_wr_data ),
.addr_a ( db_addr[$clog2(RAM_DEPTH)-1:0] ),
.dout_a ( db_rd_data ),
.clk_b ( '0 ),
.en_b ( '0 ),
.we_b ( '0 ),
.din_b ( '0 ),
.addr_b ( '0 ),
.dout_b ( )
);
assign isCtrlAddr = (!i_apb_m2s.paddr[8]);
assign rd_data_valid = (ack_rise && read);
assign db_apb_s2m.pready = (db_apb_m2s.psel && db_apb_m2s.penable) && db_pready; // Delay 1 clock cycle
assign db_apb_s2m.prdata = (!o_busy && (db_apb_m2s.psel && db_apb_m2s.penable)) ? db_rd_data : '0;
assign db_apb_s2m.pserr = '0;
//------------------------------------------------------------------------------------------------//
// I2C Engine
//------------------------------------------------------------------------------------------------//
// Ctrl Inputs
logic start;
logic stop;
logic write;
logic ack_stretch;
logic ack_in;
logic [7:0] din;
logic busy;
// Status Outputs
logic ack_out;
// Read for I2C interface
assign din = (state == I2C_10b_DEV_ADDR) ? {5'b11110, device_address[9:8],1'b0} : // CMD code + Addr + Write
(state == I2C_DEV_ADDR) ? ((is_10b_addr) ? {device_address[7:0]} : {device_address[6:0],1'b0}): // Addr + Write
(state == I2C_RS_10b_DEV_ADDR) ? {5'b11110, device_address[9:8],1'b1} : // Addr + Read
(state == I2C_RS_DEV_ADDR) ? ((is_10b_addr) ? {device_address[7:0]} : {device_address[6:0],1'b1}): // Addr + Read
db_rd_data[i2c_db_addr[1:0]*8+:8];
//I2C 底层位引擎(i2c_ctrl_byte_inst)真正产生 I2C 时序的底层模块
i2c i2c_ctrl_byte_inst (
.clk ( i_aclk ), // clock
.rst ( 1'b0 ), // synchronous active high reset
.nReset ( !i_arst ), // asynchronous active low reset
.ena ( '1 ), // core enable signal
.clk_cnt ( clk_cnt ), // 4x SCL (default)
// control inputs
.start ( start ),
.stop ( stop ),
.read ( read ),
.write ( write ),
.ack_stretch ( '0 ),
.ack_in ( ack_in ),
.din ( din ),
.i2c_scl_timeout( i2c_scl_timeout ),
// status outputs
.cmd_ack ( cmd_ack ),
.ack_out ( ack_out ),
.i2c_busy ( i2c_busy ),
.i2c_al ( i2c_al ),
.idle ( idle ),
.dout ( rd_data ),
// I2C signals
.scl_i ( scl_i ),
.scl_o ( ),
.scl_oen ( scl_o ),
.sda_i ( sda_i ),
.sda_o ( ),
.sda_oen ( sda_o )
);
//------------------------------------------------------------------------------------------------//
// I2C Interface FSM I2C 事务 FSM 状态机
//------------------------------------------------------------------------------------------------//
assign ack_rise = ({cmd_ack_prev,cmd_ack} == 2'b01);
assign cmd_valid = (num_trans != '0) ? (num_wr_bytes >= num_rd_bytes) : '1;
assign write = ((state == I2C_WRITE) || (state == I2C_10b_DEV_ADDR) || (state == I2C_RS_10b_DEV_ADDR) ||
(state == I2C_DEV_ADDR) || (state == I2C_RS_DEV_ADDR));
assign read = (state == I2C_READ);
assign start = (is_10b_addr) ? ((state == I2C_10b_DEV_ADDR) || (state == I2C_RS_10b_DEV_ADDR)):
((state == I2C_DEV_ADDR ) || (state == I2C_RS_DEV_ADDR));
always_comb begin
state_nxt = state;
if (ack_out && cmd_ack && (state != I2C_IDLE) && (state != I2C_DONE) && !read) begin
state_nxt = (state == I2C_PERI_NACK) ? I2C_DONE : I2C_PERI_NACK;
end
else begin
case(state)
I2C_IDLE: begin
if (fsm_start && cmd_valid) begin
state_nxt = (num_wr_bytes == '0) ?
(is_10b_addr ) ? I2C_RS_10b_DEV_ADDR : I2C_RS_DEV_ADDR:
(is_10b_addr ) ? I2C_10b_DEV_ADDR : I2C_DEV_ADDR ;
end
end
I2C_10b_DEV_ADDR: begin
state_nxt = I2C_DEV_ADDR;
end
I2C_DEV_ADDR: begin
state_nxt = I2C_WRITE;
end
I2C_WRITE: begin
if (transaction_cnt == (num_wr_bytes - 1)) begin
state_nxt = (num_rd_bytes != '0) ? (is_10b_addr) ? I2C_RS_10b_DEV_ADDR : I2C_RS_DEV_ADDR : I2C_DONE;
end
end
I2C_RS_10b_DEV_ADDR: begin
state_nxt = I2C_RS_DEV_ADDR;
end
I2C_RS_DEV_ADDR: begin
state_nxt = I2C_READ;
end
I2C_READ: begin
state_nxt = (transaction_cnt == (num_rd_bytes-1)) ? I2C_DONE : I2C_READ;
end
I2C_PERI_NACK: begin
state_nxt = I2C_DONE;
end
I2C_DONE: begin
if (idle && (trans_cnt < num_trans)) begin
state_nxt = I2C_IDLE;
end
else if (idle && !fsm_start) begin
state_nxt = I2C_IDLE;
end
else begin
state_nxt = I2C_DONE;
end
end
endcase
end
end
always@(posedge i_aclk) begin
if (i_arst) begin
state <= I2C_IDLE;
state_prev <= I2C_IDLE;
transaction_cnt <= '0;
wr_ptr <= '0;
rd_ptr <= '0;
i2c_nack <= '0;
i2c_al_err <= '0;
cmd_ack_prev <= '0;
trans_cnt <= '0;
busy <= '0;
end
else begin
state <= (i2c_al) ? I2C_DONE : ((ack_rise) || ((state == I2C_IDLE) || (state == I2C_DONE) || (state == I2C_PERI_NACK)))
? state_nxt : state;
state_prev <= state;
transaction_cnt <= ((state != I2C_WRITE) && (state != I2C_READ)) ? '0 : transaction_cnt + ack_rise;
wr_ptr <= (state == I2C_WRITE) ? wr_ptr + ack_rise : (!fsm_start && !busy) ? '0 : wr_ptr;
rd_ptr <= (state == I2C_READ) ? rd_ptr + ack_rise : (!fsm_start && !busy) ? '0 : rd_ptr;
i2c_nack <= (state == I2C_PERI_NACK) ? 1'b1 : (state == I2C_IDLE) ? 1'b0 : i2c_nack;
i2c_al_err <= (i2c_al) ? 1'b1 : (state == I2C_IDLE) ? 1'b0 : i2c_al_err;
cmd_ack_prev <= cmd_ack;
trans_cnt <= ((state == I2C_IDLE) && !fsm_start ) ? 'd1 :
((state == I2C_IDLE && state_prev == I2C_DONE)) ? trans_cnt + 1 : trans_cnt;
busy <= (!busy && (state == I2C_IDLE) && fsm_start && cmd_valid) ? '1 :
(busy && (state == I2C_DONE) && idle && (trans_cnt >= num_trans)) ? '0 : busy;
end
end
assign stop = ((state_nxt == I2C_DONE) || (state_nxt == I2C_PERI_NACK)) && (state_nxt != state);
assign ack_in = ((state_nxt == I2C_DONE) && (state == I2C_READ));
assign o_busy = busy;
assign i2c_done = (state == I2C_DONE) && idle;
assign o_data = rd_data;
assign o_data_valid = rd_data_valid;
endmodule4、模块工作流程(CPU 配置 → I2C 执行)
步骤 1:CPU 写寄存器,包含下面几个数据:
- 设备地址
- 写字节数、读字节数
- 时钟配置
- 将要写的数据写入 DATA RAM
步骤 2:CPU 写启动位 = 1;
步骤 3:FSM 自动执行,i2c时序:
- 发 START
- 发地址
- 写字节
- 重复 START(如需读)
- 发读地址
- 读字节
- 发 STOP
步骤 4:结果自动写入 RAM
步骤 5:状态寄存器更新(done /nack/error)
步骤 6:CPU 读取 RAM 获得结果
5、总结
这是一个可由 CPU 配置、自动完成 I2C 主机读写、带数据缓存、带错误检测的工程级 I2C 控制器。具体源码已贴上,但涉及到一些实例化的代码,由于空间有限,无法继续贴上,可以联系vx:hope_0793,详情讨论!