参考
目标
在普通以太网环境下,让不同从机产生同步的周期脉冲 (抖动约20us)
现象
未启动主机,从机输出的脉冲未对齐
启动主机后, 从机输出的脉冲在几秒内对齐
假设
P1: 局域网中的从机同时收倒主机广播包
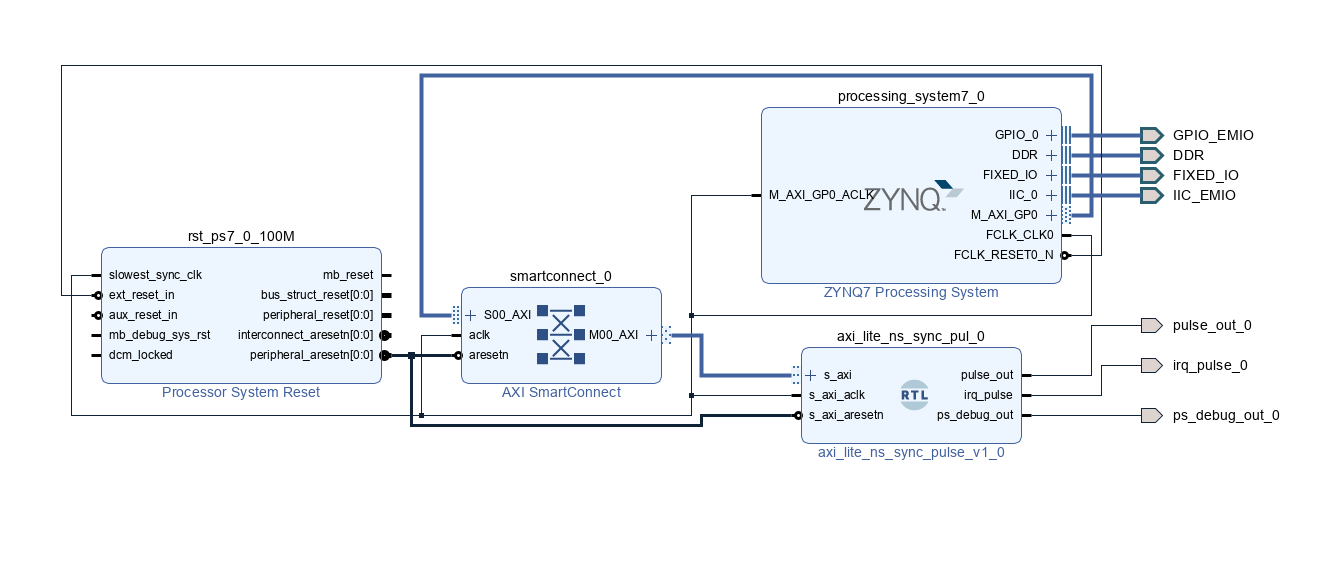
系统结构
text
UDP Broadcast SyncFrame
主站 --------------------------------> 从站 1
| 从站 2
| 从站 3
v ...
64 位纳秒基准时间 本地PL里的64位纳秒计数器BD
irq_pulse_0和pulse_out_0 都是从机产生的同步脉冲, 只是pulse_out_0 的脉冲宽度大一些
ps_debug_out_0 是给ps测试用的引脚, 测试从机是否可以同步执行某些动作
AXI 地址映射表
| Name | Interface | Slave Segment | Master Base Address | Range | Master High Address |
|---|---|---|---|---|---|
| /axi_lite_ns_sync_pul_0/s_axi | s_axi | reg0 | 0x43C0_0000 | 64K | 0x43C0_FFFF |
PIN.xdc
bash
## SPI SCLK
## IIC
set_property -dict {PACKAGE_PIN T11 IOSTANDARD LVCMOS33} [get_ports IIC_EMIO_scl_io]
set_property -dict {PACKAGE_PIN V5 IOSTANDARD LVCMOS33} [get_ports IIC_EMIO_sda_io]
## GPIO_EMIO
set_property -dict {PACKAGE_PIN U5 IOSTANDARD LVCMOS33} [get_ports GPIO_EMIO_tri_io[0]]
set_property -dict {PACKAGE_PIN V7 IOSTANDARD LVCMOS33} [get_ports GPIO_EMIO_tri_io[1]]
set_property -dict {PACKAGE_PIN W8 IOSTANDARD LVCMOS33} [get_ports GPIO_EMIO_tri_io[2]]
set_property -dict {PACKAGE_PIN U9 IOSTANDARD LVCMOS33} [get_ports GPIO_EMIO_tri_io[3]]
set_property -dict {PACKAGE_PIN U10 IOSTANDARD LVCMOS33} [get_ports GPIO_EMIO_tri_io[4]]
set_property -dict {PACKAGE_PIN W6 IOSTANDARD LVCMOS33} [get_ports GPIO_EMIO_tri_io[5]]
set_property -dict {PACKAGE_PIN Y7 IOSTANDARD LVCMOS33} [get_ports GPIO_EMIO_tri_io[6]]
set_property -dict {PACKAGE_PIN Y9 IOSTANDARD LVCMOS33} [get_ports GPIO_EMIO_tri_io[7]]
# 中断和脉冲产生
set_property -dict {PACKAGE_PIN W15 IOSTANDARD LVCMOS33} [get_ports irq_pulse_0]
set_property -dict {PACKAGE_PIN V15 IOSTANDARD LVCMOS33} [get_ports pulse_out_0]
set_property -dict {PACKAGE_PIN W14 IOSTANDARD LVCMOS33} [get_ports ps_debug_out_0]PL代码
主要功能如下
为PS提供一个64位ns计数器
PL内部自动更新下一次脉冲产生的时刻
PS可以设置下次脉冲产生的时刻
PS可以操作ps_debug_out_0 引脚
ns_sync_pulse_core.v
verilog
`timescale 1ns / 1ps
module ns_sync_pulse_core #(
parameter integer PL_TICK_NS = 10, // PL 时钟周期对应的纳秒数,100MHz 时为 10ns
parameter [31:0] DEFAULT_PULSE_PERIOD_NS = 32'd1_000_000, // 默认脉冲周期,1kHz 对应 1_000_000ns
parameter [31:0] DEFAULT_PULSE_WIDTH_NS = 32'd10_000, // 默认脉冲宽度
parameter [31:0] CORE_VERSION = 32'h0001_0000 // IP 版本号
)(
input wire clk, // PL 工作时钟,建议 100MHz
input wire rst_n, // 低有效复位
input wire reg_wr_en, // 简单寄存器写使能,由 AXI-Lite wrapper 产生
input wire [7:0] reg_wr_addr, // 简单寄存器写地址,按字节地址编码
input wire [31:0] reg_wr_data, // 简单寄存器写数据
input wire [7:0] reg_rd_addr, // 简单寄存器读地址,按字节地址编码
output reg [31:0] reg_rd_data, // 简单寄存器读数据
output reg pulse_out, // 硬件脉冲输出
output reg irq_pulse // 每次产生脉冲时输出 1 个 clk 周期事件
);
localparam [7:0] ADDR_CONTROL = 8'h00; // CONTROL:bit0 计数器使能,bit1 脉冲输出使能
localparam [7:0] ADDR_STATUS = 8'h04; // STATUS:bit0 输出状态,bit1/2 使能状态,bit3 时间锁存有效
localparam [7:0] ADDR_TIME_LATCH_LOW = 8'h08; // TIME_LATCH_LOW:锁存时间低 32 位,只读
localparam [7:0] ADDR_TIME_LATCH_HIGH = 8'h0C; // TIME_LATCH_HIGH:锁存时间高 32 位,只读
localparam [7:0] ADDR_NEXT_EDGE_CFG_LOW = 8'h10; // NEXT_EDGE_CFG_LOW:待提交下一边沿低 32 位
localparam [7:0] ADDR_NEXT_EDGE_CFG_HIGH = 8'h14; // NEXT_EDGE_CFG_HIGH:待提交下一边沿高 32 位
localparam [7:0] ADDR_PULSE_PERIOD_NS = 8'h18; // PULSE_PERIOD_NS:脉冲周期,单位 ns
localparam [7:0] ADDR_PULSE_WIDTH_NS = 8'h1C; // PULSE_WIDTH_NS:脉冲宽度,单位 ns
localparam [7:0] ADDR_PHASE_DELTA_NS = 8'h20; // PHASE_DELTA_NS:int32,相位修正量,正数提前,负数延后
localparam [7:0] ADDR_PERIOD_ADJ_NS = 8'h24; // PERIOD_ADJ_NS:int32,周期修正量,正数变慢,负数变快
localparam [7:0] ADDR_COMMAND = 8'h28; // COMMAND:只写命令寄存器
localparam [7:0] ADDR_VERSION = 8'h2C; // VERSION:版本号,只读
localparam [7:0] ADDR_ACTIVE_EDGE_LOW = 8'h30; // ACTIVE_EDGE_LOW:当前生效下一边沿低 32 位,只读
localparam [7:0] ADDR_ACTIVE_EDGE_HIGH = 8'h34; // ACTIVE_EDGE_HIGH:当前生效下一边沿高 32 位,只读
localparam [7:0] ADDR_PULSE_COUNT_LOW = 8'h38; // PULSE_COUNT_LOW:已输出脉冲计数低 32 位,只读
localparam [7:0] ADDR_PULSE_COUNT_HIGH = 8'h3C; // PULSE_COUNT_HIGH:已输出脉冲计数高 32 位,只读
localparam CONTROL_COUNTER_ENABLE_BIT = 0; // CONTROL bit0:计数器使能
localparam CONTROL_PULSE_ENABLE_BIT = 1; // CONTROL bit1:脉冲输出使能
localparam COMMAND_APPLY_NEXT_EDGE_BIT = 0; // COMMAND bit0:提交 NEXT_EDGE_CFG 到 active next_edge_ns
localparam COMMAND_APPLY_PHASE_BIT = 1; // COMMAND bit1:应用相位修正 next_edge_ns -= phase_delta_ns
localparam COMMAND_CLEAR_COUNTER_BIT = 2; // COMMAND bit2:清零 time_ns
localparam COMMAND_LATCH_TIME_BIT = 3; // COMMAND bit3:锁存 time_ns 到 time_latch_ns
localparam COMMAND_CLEAR_PULSE_COUNT_BIT = 4; // COMMAND bit4:清零 pulse_count
reg [31:0] control_reg; // 控制寄存器缓存,对应 ADDR_CONTROL
reg [63:0] time_ns; // 64 位本地纳秒计数器,使能后每拍增加 PL_TICK_NS
reg [63:0] time_latch_ns; // 64 位时间锁存值,PS 读时间前先用 COMMAND_LATCH_TIME_BIT 锁存
reg time_latch_valid; // 时间锁存有效标志,反映到 STATUS bit3
reg [63:0] next_edge_ns; // 当前生效的下一次脉冲边沿时间
reg [63:0] next_edge_cfg_ns; // 下一次脉冲边沿配置影子寄存器,low/high 写完后再提交
reg [31:0] pulse_period_ns; // 基准输出周期,单位 ns
reg [31:0] pulse_width_ns; // 输出脉冲宽度,单位 ns
reg signed [31:0] phase_delta_ns; // 相位修正量,正数提前边沿,负数延后边沿
reg signed [31:0] period_adj_ns; // 频率修正量,参与 pulse_period_ns + period_adj_ns
reg [63:0] pulse_end_ns; // 当前脉冲结束时间
reg [63:0] pulse_count; // 已输出脉冲数量
reg pulse_active; // 当前是否处于脉冲高电平期间
reg pulse_enable_d; // pulse_enable 上一拍状态,用于检测上升沿
reg [63:0] period_step_ns; // 实际输出周期,等于 pulse_period_ns + period_adj_ns 后再限幅
reg [31:0] period_adj_abs; // period_adj_ns 的绝对值
wire counter_enable; // 从 control_reg 解码出的计数器使能
wire pulse_enable; // 从 control_reg 解码出的脉冲使能
wire command_wr; // 当前写操作是否为 COMMAND 写
wire command_update_edge; // 当前 COMMAND 是否会更新 next_edge_ns
assign counter_enable = control_reg[CONTROL_COUNTER_ENABLE_BIT];
assign pulse_enable = control_reg[CONTROL_PULSE_ENABLE_BIT];
assign command_wr = reg_wr_en && (reg_wr_addr == ADDR_COMMAND);
assign command_update_edge = command_wr &&
(reg_wr_data[COMMAND_APPLY_NEXT_EDGE_BIT] ||
reg_wr_data[COMMAND_APPLY_PHASE_BIT]);
// 将 int32 有符号数转换成绝对值。
// 后续时序逻辑用无符号幅值做加减,避免直接混用有符号运算。
function [31:0] abs_s32;
input signed [31:0] value;
begin
if (value[31]) begin
abs_s32 = (~value[31:0]) + 32'd1;
end else begin
abs_s32 = value[31:0];
end
end
endfunction
// 保证脉冲宽度至少覆盖 1 个 PL 时钟周期。
function [63:0] normalize_width_ns;
input [31:0] width_ns;
begin
if (width_ns < PL_TICK_NS) begin
normalize_width_ns = PL_TICK_NS;
end else begin
normalize_width_ns = {32'd0, width_ns};
end
end
endfunction
// 计算频率修正后的实际输出周期。
// period_adj_ns 为负时缩短周期,为正时拉长周期。
// 最终周期限制为至少 1 个 PL 时钟周期。
always @(*) begin
period_adj_abs = abs_s32(period_adj_ns);
if (period_adj_ns[31]) begin
if ({32'd0, pulse_period_ns} > {32'd0, period_adj_abs}) begin
period_step_ns = {32'd0, pulse_period_ns} - {32'd0, period_adj_abs};
end else begin
period_step_ns = PL_TICK_NS;
end
end else begin
period_step_ns = {32'd0, pulse_period_ns} + {32'd0, period_adj_ns[31:0]};
end
if (period_step_ns < PL_TICK_NS) begin
period_step_ns = PL_TICK_NS;
end
end
// 主时序逻辑。
always @(posedge clk) begin
if (!rst_n) begin
control_reg <= 32'd0;
time_ns <= 64'd0;
time_latch_ns <= 64'd0;
time_latch_valid <= 1'b0;
next_edge_ns <= 64'd0;
next_edge_cfg_ns <= 64'd0;
pulse_period_ns <= DEFAULT_PULSE_PERIOD_NS;
pulse_width_ns <= DEFAULT_PULSE_WIDTH_NS;
phase_delta_ns <= 32'sd0;
period_adj_ns <= 32'sd0;
pulse_end_ns <= 64'd0;
pulse_count <= 64'd0;
pulse_active <= 1'b0;
pulse_enable_d <= 1'b0;
pulse_out <= 1'b0;
irq_pulse <= 1'b0;
end else begin
// irq_pulse 是单时钟周期事件脉冲。
irq_pulse <= 1'b0;
// 处理外部总线封装模块转进来的寄存器写操作。
if (reg_wr_en) begin
case (reg_wr_addr)
ADDR_CONTROL: begin
control_reg <= reg_wr_data;
end
ADDR_NEXT_EDGE_CFG_LOW: begin
next_edge_cfg_ns[31:0] <= reg_wr_data;
end
ADDR_NEXT_EDGE_CFG_HIGH: begin
next_edge_cfg_ns[63:32] <= reg_wr_data;
end
ADDR_PULSE_PERIOD_NS: begin
pulse_period_ns <= reg_wr_data;
end
ADDR_PULSE_WIDTH_NS: begin
pulse_width_ns <= reg_wr_data;
end
ADDR_PHASE_DELTA_NS: begin
phase_delta_ns <= reg_wr_data;
end
ADDR_PERIOD_ADJ_NS: begin
period_adj_ns <= reg_wr_data;
end
default: begin
// 只读地址和未定义地址忽略写操作。
end
endcase
end
// 锁存当前时间。锁存值取本周期计数器自增前的 time_ns。
if (command_wr && reg_wr_data[COMMAND_LATCH_TIME_BIT]) begin
time_latch_ns <= time_ns;
time_latch_valid <= 1'b1;
end
// 按命令清零脉冲输出计数器。
if (command_wr && reg_wr_data[COMMAND_CLEAR_PULSE_COUNT_BIT]) begin
pulse_count <= 64'd0;
end
// 64 位时间计数器在使能后单调递增。
// clear_counter 优先级高于正常计数。
if (command_wr && reg_wr_data[COMMAND_CLEAR_COUNTER_BIT]) begin
time_ns <= 64'd0;
end else if (counter_enable) begin
time_ns <= time_ns + PL_TICK_NS;
end
// 记录上一拍 pulse_enable,用于检测脉冲使能上升沿。
pulse_enable_d <= pulse_enable;
// 命令寄存器对 next_edge_ns 的更新任何时候都可以生效。
// 这样 PS 可以先配置下一边沿,再打开 pulse_enable。
if (command_wr && reg_wr_data[COMMAND_APPLY_NEXT_EDGE_BIT]) begin
next_edge_ns <= next_edge_cfg_ns;
end else if (command_wr && reg_wr_data[COMMAND_APPLY_PHASE_BIT]) begin
if (phase_delta_ns[31]) begin
// phase_delta_ns 为负:延后下一次边沿。
next_edge_ns <= next_edge_ns + {32'd0, abs_s32(phase_delta_ns)};
end else if (next_edge_ns > {32'd0, phase_delta_ns[31:0]}) begin
// phase_delta_ns 为正:提前下一次边沿。
next_edge_ns <= next_edge_ns - {32'd0, phase_delta_ns[31:0]};
end else begin
next_edge_ns <= 64'd0;
end
end
if (!(counter_enable && pulse_enable)) begin
pulse_active <= 1'b0;
pulse_out <= 1'b0;
end else begin
// 到达配置的脉冲宽度后,结束当前脉冲。
if (pulse_active && (time_ns >= pulse_end_ns)) begin
pulse_active <= 1'b0;
pulse_out <= 1'b0;
end
// 命令寄存器对 next_edge_ns 的更新优先级高于自动排程。
if (command_update_edge) begin
// 本周期只执行命令,不自动产生脉冲或推进边沿。
end else if (!pulse_enable_d && pulse_enable && (next_edge_ns <= time_ns)) begin
// pulse_enable 上升沿时,如果 next_edge_ns 已经过期,
// 重新安排下一次边沿,避免补发一串追赶脉冲。
next_edge_ns <= time_ns + period_step_ns;
end else if (time_ns >= next_edge_ns) begin
// 产生一个脉冲事件,并安排下一周期边沿。
pulse_active <= 1'b1;
pulse_out <= 1'b1;
irq_pulse <= 1'b1;
pulse_end_ns <= time_ns + normalize_width_ns(pulse_width_ns);
next_edge_ns <= next_edge_ns + period_step_ns;
pulse_count <= pulse_count + 64'd1;
end
end
end
end
// 组合逻辑读数据选择器。
// 多字数据通过 low/high 两个 32 位寄存器暴露给 PS。
always @(*) begin
case (reg_rd_addr)
ADDR_CONTROL: begin
reg_rd_data = control_reg;
end
ADDR_STATUS: begin
reg_rd_data = 32'd0;
reg_rd_data[0] = pulse_out;
reg_rd_data[1] = counter_enable;
reg_rd_data[2] = pulse_enable;
reg_rd_data[3] = time_latch_valid;
end
ADDR_TIME_LATCH_LOW: begin
reg_rd_data = time_latch_ns[31:0];
end
ADDR_TIME_LATCH_HIGH: begin
reg_rd_data = time_latch_ns[63:32];
end
ADDR_NEXT_EDGE_CFG_LOW: begin
reg_rd_data = next_edge_cfg_ns[31:0];
end
ADDR_NEXT_EDGE_CFG_HIGH: begin
reg_rd_data = next_edge_cfg_ns[63:32];
end
ADDR_PULSE_PERIOD_NS: begin
reg_rd_data = pulse_period_ns;
end
ADDR_PULSE_WIDTH_NS: begin
reg_rd_data = pulse_width_ns;
end
ADDR_PHASE_DELTA_NS: begin
reg_rd_data = phase_delta_ns;
end
ADDR_PERIOD_ADJ_NS: begin
reg_rd_data = period_adj_ns;
end
ADDR_COMMAND: begin
reg_rd_data = 32'd0;
end
ADDR_VERSION: begin
reg_rd_data = CORE_VERSION;
end
ADDR_ACTIVE_EDGE_LOW: begin
reg_rd_data = next_edge_ns[31:0];
end
ADDR_ACTIVE_EDGE_HIGH: begin
reg_rd_data = next_edge_ns[63:32];
end
ADDR_PULSE_COUNT_LOW: begin
reg_rd_data = pulse_count[31:0];
end
ADDR_PULSE_COUNT_HIGH: begin
reg_rd_data = pulse_count[63:32];
end
default: begin
reg_rd_data = 32'd0;
end
endcase
end
endmoduleaxi_lite_ns_sync_pulse.v
verilog
`timescale 1ns / 1ps
module axi_lite_ns_sync_pulse #(
parameter integer PL_TICK_NS = 10, // PL 时钟周期对应的纳秒数,100MHz 时为 10ns
parameter [31:0] DEFAULT_PULSE_PERIOD_NS = 32'd1_000_000, // 默认脉冲周期,1kHz 对应 1_000_000ns
parameter [31:0] DEFAULT_PULSE_WIDTH_NS = 32'd10_000, // 默认脉冲宽度
parameter [31:0] CORE_VERSION = 32'h0001_0000 // IP 版本号
)(
input wire s_axi_aclk, // AXI-Lite 时钟,同时作为 core 工作时钟
input wire s_axi_aresetn, // AXI-Lite 低有效复位,同时作为 core 复位
input wire [7:0] s_axi_awaddr, // AXI-Lite 写地址,覆盖 0x00~0x3C 寄存器空间
input wire [2:0] s_axi_awprot, // AXI-Lite 保护属性,本模块不使用
input wire s_axi_awvalid, // AXI-Lite 写地址有效
output wire s_axi_awready, // AXI-Lite 写地址 ready
input wire [31:0] s_axi_wdata, // AXI-Lite 写数据,固定 32 位
input wire [3:0] s_axi_wstrb, // AXI-Lite 字节写使能
input wire s_axi_wvalid, // AXI-Lite 写数据有效
output wire s_axi_wready, // AXI-Lite 写数据 ready
output reg [1:0] s_axi_bresp, // AXI-Lite 写响应,固定 OKAY
output reg s_axi_bvalid, // AXI-Lite 写响应有效
input wire s_axi_bready, // AXI-Lite 写响应 ready
input wire [7:0] s_axi_araddr, // AXI-Lite 读地址,覆盖 0x00~0x3C 寄存器空间
input wire [2:0] s_axi_arprot, // AXI-Lite 保护属性,本模块不使用
input wire s_axi_arvalid, // AXI-Lite 读地址有效
output wire s_axi_arready, // AXI-Lite 读地址 ready
output reg [31:0] s_axi_rdata, // AXI-Lite 读数据,固定 32 位
output reg [1:0] s_axi_rresp, // AXI-Lite 读响应,固定 OKAY
output reg s_axi_rvalid, // AXI-Lite 读响应有效
input wire s_axi_rready, // AXI-Lite 读响应 ready
output wire pulse_out, // core 输出的硬件脉冲
output wire irq_pulse // core 每次产生脉冲时输出 1 个 clk 周期事件
);
localparam [1:0] AXI_RESP_OKAY = 2'b00; // AXI-Lite OKAY 响应
reg aw_holding; // 已经接收到写地址,但还没等到完整写事务
reg [7:0] awaddr_reg; // 暂存的写地址
reg w_holding; // 已经接收到写数据,但还没等到完整写事务
reg [31:0] wdata_reg; // 暂存的写数据
reg [3:0] wstrb_reg; // 暂存的字节写使能
wire aw_accept; // 当前周期接收写地址
wire w_accept; // 当前周期接收写数据
wire write_fire; // 当前周期形成完整写事务,并写入 core
wire [7:0] write_addr_raw; // 写事务原始地址,来自当前握手或暂存地址
wire [7:0] write_addr; // 写事务对齐后的 32 位寄存器地址
wire [31:0] write_data; // 写事务原始数据,来自当前握手或暂存数据
wire [3:0] write_strb; // 写事务字节使能,来自当前握手或暂存数据
wire ar_accept; // 当前周期接收读地址
wire [7:0] read_addr; // 读事务对齐后的 32 位寄存器地址
wire [7:0] core_reg_rd_addr; // 连接到 core 的简单寄存器读地址
wire [31:0] core_reg_rd_data; // core 返回的简单寄存器读数据
wire core_reg_wr_en; // 连接到 core 的简单寄存器写使能
wire [7:0] core_reg_wr_addr; // 连接到 core 的简单寄存器写地址
wire [31:0] core_reg_wr_data; // 连接到 core 的简单寄存器写数据
assign s_axi_awready = (!aw_holding) && (!s_axi_bvalid);
assign s_axi_wready = (!w_holding) && (!s_axi_bvalid);
assign aw_accept = s_axi_awvalid && s_axi_awready;
assign w_accept = s_axi_wvalid && s_axi_wready;
assign write_fire = (!s_axi_bvalid) &&
(aw_holding || aw_accept) &&
(w_holding || w_accept);
assign write_addr_raw = aw_accept ? s_axi_awaddr : awaddr_reg;
assign write_addr = {write_addr_raw[7:2], 2'b00};
assign write_data = w_accept ? s_axi_wdata : wdata_reg;
assign write_strb = w_accept ? s_axi_wstrb : wstrb_reg;
assign s_axi_arready = (!s_axi_rvalid) && (!write_fire);
assign ar_accept = s_axi_arvalid && s_axi_arready;
assign read_addr = {s_axi_araddr[7:2], 2'b00};
assign core_reg_rd_addr = write_fire ? write_addr : (ar_accept ? read_addr : 8'h00);
assign core_reg_wr_en = write_fire;
assign core_reg_wr_addr = write_addr;
assign core_reg_wr_data = apply_wstrb(core_reg_rd_data, write_data, write_strb);
// 根据 AXI-Lite WSTRB 合并字节写数据。
// PS 使用 32 位整字写时,WSTRB 通常为 4'b1111,此函数等价于直接写入 write_data。
function [31:0] apply_wstrb;
input [31:0] old_data;
input [31:0] new_data;
input [3:0] byte_strobe;
integer byte_index;
begin
apply_wstrb = old_data;
for (byte_index = 0; byte_index < 4; byte_index = byte_index + 1) begin
if (byte_strobe[byte_index]) begin
apply_wstrb[byte_index*8 +: 8] = new_data[byte_index*8 +: 8];
end
end
end
endfunction
// 写地址/写数据通道。
// 支持 AW 和 W 分开到达;两者都到齐后,向 core 发出一个周期的写使能。
always @(posedge s_axi_aclk) begin
if (!s_axi_aresetn) begin
aw_holding <= 1'b0;
awaddr_reg <= 8'd0;
w_holding <= 1'b0;
wdata_reg <= 32'd0;
wstrb_reg <= 4'd0;
s_axi_bresp <= AXI_RESP_OKAY;
s_axi_bvalid <= 1'b0;
end else begin
if (write_fire) begin
aw_holding <= 1'b0;
w_holding <= 1'b0;
s_axi_bresp <= AXI_RESP_OKAY;
s_axi_bvalid <= 1'b1;
end else begin
if (aw_accept) begin
aw_holding <= 1'b1;
awaddr_reg <= s_axi_awaddr;
end
if (w_accept) begin
w_holding <= 1'b1;
wdata_reg <= s_axi_wdata;
wstrb_reg <= s_axi_wstrb;
end
if (s_axi_bvalid && s_axi_bready) begin
s_axi_bvalid <= 1'b0;
end
end
end
end
// 读地址/读数据通道。
// 接收到 AR 后,立即从 core 的组合读口取数,并返回一个 AXI-Lite 读响应。
always @(posedge s_axi_aclk) begin
if (!s_axi_aresetn) begin
s_axi_rdata <= 32'd0;
s_axi_rresp <= AXI_RESP_OKAY;
s_axi_rvalid <= 1'b0;
end else begin
if (ar_accept) begin
s_axi_rdata <= core_reg_rd_data;
s_axi_rresp <= AXI_RESP_OKAY;
s_axi_rvalid <= 1'b1;
end else if (s_axi_rvalid && s_axi_rready) begin
s_axi_rvalid <= 1'b0;
end
end
end
ns_sync_pulse_core #(
.PL_TICK_NS(PL_TICK_NS),
.DEFAULT_PULSE_PERIOD_NS(DEFAULT_PULSE_PERIOD_NS),
.DEFAULT_PULSE_WIDTH_NS(DEFAULT_PULSE_WIDTH_NS),
.CORE_VERSION(CORE_VERSION)
) u_core (
.clk(s_axi_aclk),
.rst_n(s_axi_aresetn),
.reg_wr_en(core_reg_wr_en),
.reg_wr_addr(core_reg_wr_addr),
.reg_wr_data(core_reg_wr_data),
.reg_rd_addr(core_reg_rd_addr),
.reg_rd_data(core_reg_rd_data),
.pulse_out(pulse_out),
.irq_pulse(irq_pulse)
);
// 未使用的 AXI 保护属性,单独引用一次,避免部分工具报警未使用。
wire unused_axi_prot;
assign unused_axi_prot = ^{s_axi_awprot, s_axi_arprot};
endmoduleVItis环境测试一下IP
周期
读64位ns计数器
取反ps_debug_out_0 引脚
打印PL内部状态
main.c
c
#include "sleep.h"
#include "xil_io.h"
#include "xil_printf.h"
#include "xil_types.h"
/*
* axi_lite_ns_sync_pulse AXI-Lite base address.
*
* This address must match the Vivado Address Editor assignment.
*/
#define NS_SYNC_BASE_ADDR 0x43C00000U
/*
* Minimal register map for the simplified ns_sync_pulse_core.
*/
#define REG_CONTROL 0x00U
#define REG_STATUS 0x04U
#define REG_TIME_LATCH_LOW 0x08U
#define REG_TIME_LATCH_HIGH 0x0CU
#define REG_NEXT_EDGE_CFG_LOW 0x10U
#define REG_NEXT_EDGE_CFG_HIGH 0x14U
#define REG_COMMAND 0x18U
#define REG_VERSION 0x1CU
#define REG_ACTIVE_EDGE_LOW 0x20U
#define REG_ACTIVE_EDGE_HIGH 0x24U
/*
* REG_CONTROL bits.
*/
#define CONTROL_COUNTER_ENABLE 0x00000001U
#define CONTROL_PULSE_ENABLE 0x00000002U
#define CONTROL_PS_DEBUG_OUT 0x00000004U
/*
* REG_STATUS bits.
*/
#define STATUS_PULSE_OUT 0x00000001U
#define STATUS_COUNTER_ENABLE 0x00000002U
#define STATUS_PULSE_ENABLE 0x00000004U
#define STATUS_TIME_LATCH_VALID 0x00000008U
#define STATUS_NEXT_EDGE_VALID 0x00000010U
#define STATUS_PS_DEBUG_OUT 0x00000020U
/*
* REG_COMMAND bits.
*/
#define CMD_LATCH_TIME 0x00000001U
#define CMD_APPLY_NEXT_EDGE 0x00000002U
static inline void ns_sync_write(u32 offset, u32 value)
{
Xil_Out32(NS_SYNC_BASE_ADDR + offset, value);
}
static inline u32 ns_sync_read(u32 offset)
{
return Xil_In32(NS_SYNC_BASE_ADDR + offset);
}
static u64 ns_sync_make_u64(u32 high, u32 low)
{
return (((u64)high) << 32) | (u64)low;
}
static void ns_sync_print_u64(const char *name, u64 value)
{
xil_printf("%s = 0x%08x_%08x (%u ms)\r\n",
name,
(u32)(value >> 32),
(u32)value,
(u32)(value / 1000000ULL));
}
static u64 ns_sync_read_time(void)
{
u32 low;
u32 high;
/*
* Latch first, then read low/high. This avoids 64-bit tearing.
*/
ns_sync_write(REG_COMMAND, CMD_LATCH_TIME);
low = ns_sync_read(REG_TIME_LATCH_LOW);
high = ns_sync_read(REG_TIME_LATCH_HIGH);
return ns_sync_make_u64(high, low);
}
static void ns_sync_dump_status(void)
{
u32 status = ns_sync_read(REG_STATUS);
xil_printf("STATUS = 0x%08x", status);
xil_printf(" pulse_out=%d", (status & STATUS_PULSE_OUT) ? 1 : 0);
xil_printf(" counter_en=%d", (status & STATUS_COUNTER_ENABLE) ? 1 : 0);
xil_printf(" pulse_en=%d", (status & STATUS_PULSE_ENABLE) ? 1 : 0);
xil_printf(" latch_valid=%d", (status & STATUS_TIME_LATCH_VALID) ? 1 : 0);
xil_printf(" next_edge_valid=%d", (status & STATUS_NEXT_EDGE_VALID) ? 1 : 0);
xil_printf(" ps_debug_out=%d\r\n", (status & STATUS_PS_DEBUG_OUT) ? 1 : 0);
}
static int ns_sync_check_version(void)
{
u32 version = ns_sync_read(REG_VERSION);
xil_printf("VERSION = 0x%08x\r\n", version);
if (version == 0U || version == 0xFFFFFFFFU) {
xil_printf("ERROR: AXI read failed. Check base address 0x%08x and bitstream.\r\n",
(u32)NS_SYNC_BASE_ADDR);
return -1;
}
return 0;
}
int main(void)
{
u32 control = 0U;
u32 debug_state = 0U;
u64 now_ns;
xil_printf("\r\n=== ns_sync_pulse bare-metal minimal test ===\r\n");
xil_printf("BASE = 0x%08x\r\n", (u32)NS_SYNC_BASE_ADDR);
if (ns_sync_check_version() != 0) {
return -1;
}
/*
* Enable only the 64-bit PL time counter first.
*/
control = CONTROL_COUNTER_ENABLE;
ns_sync_write(REG_CONTROL, control);
usleep(1000);
now_ns = ns_sync_read_time();
ns_sync_print_u64("time_ns", now_ns);
ns_sync_dump_status();
xil_printf("Loop: toggle ps_debug_out every 500ms and print latched time_ns.\r\n");
while (1) {
usleep(500000);
debug_state ^= CONTROL_PS_DEBUG_OUT;
control = CONTROL_COUNTER_ENABLE | debug_state;
ns_sync_write(REG_CONTROL, control);
now_ns = ns_sync_read_time();
ns_sync_print_u64("time_ns", now_ns);
ns_sync_dump_status();
}
return 0;
}测试主从之间的时延
帧格式
latency_probe.hpp
c
#pragma once
#include <array>
#include <cstddef>
#include <cstdint>
namespace latency_wire {
static const std::uint16_t kMagic = 0x4C54u;
static const std::uint16_t kVersion = 1u;
static const std::uint32_t kTypeRequest = 1u;
static const std::uint32_t kTypeResponse = 2u;
static const std::uint16_t kDefaultPort = 5006u;
static const std::uint32_t kDefaultCount = 100u;
static const std::uint32_t kDefaultIntervalMs = 30u;
static const std::uint32_t kDefaultTimeoutMs = 1000u;
static const std::size_t kFrameWireSize = 40u;
struct LatencyFrame {
//固定标识0x4C54 测延时用
std::uint16_t magic;
std::uint16_t version;
//1 = request,主机发给从机
//2 = response从机回给主机
std::uint32_t msg_type;
//序号
std::uint32_t seq;
//保留字段
std::uint32_t reserved;
//主机发出的主机时间吗
std::uint64_t master_tx_ns;
//从机收到的从机时间
std::uint64_t slave_rx_ns;
//从机发出时的从机时间
std::uint64_t slave_tx_ns;
};
inline void PutLe16(std::uint8_t *dst, std::uint16_t value)
{
dst[0] = static_cast<std::uint8_t>(value & 0xffu);
dst[1] = static_cast<std::uint8_t>((value >> 8) & 0xffu);
}
inline void PutLe32(std::uint8_t *dst, std::uint32_t value)
{
dst[0] = static_cast<std::uint8_t>(value & 0xffu);
dst[1] = static_cast<std::uint8_t>((value >> 8) & 0xffu);
dst[2] = static_cast<std::uint8_t>((value >> 16) & 0xffu);
dst[3] = static_cast<std::uint8_t>((value >> 24) & 0xffu);
}
inline void PutLe64(std::uint8_t *dst, std::uint64_t value)
{
PutLe32(dst, static_cast<std::uint32_t>(value & 0xffffffffull));
PutLe32(dst + 4, static_cast<std::uint32_t>(value >> 32));
}
inline std::uint16_t GetLe16(const std::uint8_t *src)
{
return static_cast<std::uint16_t>(src[0] | (static_cast<std::uint16_t>(src[1]) << 8));
}
inline std::uint32_t GetLe32(const std::uint8_t *src)
{
return static_cast<std::uint32_t>(src[0]) |
(static_cast<std::uint32_t>(src[1]) << 8) |
(static_cast<std::uint32_t>(src[2]) << 16) |
(static_cast<std::uint32_t>(src[3]) << 24);
}
inline std::uint64_t GetLe64(const std::uint8_t *src)
{
return static_cast<std::uint64_t>(GetLe32(src)) |
(static_cast<std::uint64_t>(GetLe32(src + 4)) << 32);
}
inline std::array<std::uint8_t, kFrameWireSize> Encode(const LatencyFrame &frame)
{
std::array<std::uint8_t, kFrameWireSize> out = {};
PutLe16(out.data() + 0, frame.magic);
PutLe16(out.data() + 2, frame.version);
PutLe32(out.data() + 4, frame.msg_type);
PutLe32(out.data() + 8, frame.seq);
PutLe32(out.data() + 12, frame.reserved);
PutLe64(out.data() + 16, frame.master_tx_ns);
PutLe64(out.data() + 24, frame.slave_rx_ns);
PutLe64(out.data() + 32, frame.slave_tx_ns);
return out;
}
inline LatencyFrame Decode(const std::uint8_t *in)
{
LatencyFrame frame = {};
frame.magic = GetLe16(in + 0);
frame.version = GetLe16(in + 2);
frame.msg_type = GetLe32(in + 4);
frame.seq = GetLe32(in + 8);
frame.reserved = GetLe32(in + 12);
frame.master_tx_ns = GetLe64(in + 16);
frame.slave_rx_ns = GetLe64(in + 24);
frame.slave_tx_ns = GetLe64(in + 32);
return frame;
}
inline bool IsValid(const LatencyFrame &frame, std::uint32_t msg_type)
{
return frame.magic == kMagic &&
frame.version == kVersion &&
frame.msg_type == msg_type;
}
} // namespace latency_wire主机
latency_master.cpp
c
#include "latency_probe.hpp"
#include <arpa/inet.h>
#include <algorithm>
#include <cerrno>
#include <csignal>
#include <cstdint>
#include <cstdlib>
#include <cstring>
#include <fstream>
#include <iomanip>
#include <iostream>
#include <limits>
#include <netinet/in.h>
#include <sys/socket.h>
#include <sys/time.h>
#include <time.h>
#include <unistd.h>
#include <vector>
namespace {
static const char *kDefaultDestIp = "255.255.255.255";
static const std::uint64_t kNsPerMs = 1000000ull;
static const std::uint64_t kNsPerSec = 1000000000ull;
static const std::uint64_t kCalibrateMaxRttNs = 300000ull;
static const std::uint64_t kCalibrateMaxDelayNs = 200000ull;
volatile sig_atomic_t g_stop_requested = 0;
void HandleStopSignal(int)
{
g_stop_requested = 1;
}
void InstallSignalHandlers()
{
struct sigaction action;
std::memset(&action, 0, sizeof(action));
action.sa_handler = HandleStopSignal;
sigemptyset(&action.sa_mask);
sigaction(SIGINT, &action, NULL);
sigaction(SIGTERM, &action, NULL);
}
std::uint64_t MonotonicNs()
{
struct timespec now;
clock_gettime(CLOCK_MONOTONIC, &now);
return static_cast<std::uint64_t>(now.tv_sec) * kNsPerSec +
static_cast<std::uint64_t>(now.tv_nsec);
}
void SleepMs(std::uint32_t delay_ms)
{
struct timespec delay;
delay.tv_sec = static_cast<time_t>(delay_ms / 1000u);
delay.tv_nsec = static_cast<long>((delay_ms % 1000u) * kNsPerMs);
while (!g_stop_requested && nanosleep(&delay, &delay) < 0 && errno == EINTR) {
}
}
bool ParseU16(const char *text, std::uint16_t &value_out)
{
char *end = NULL;
unsigned long value = std::strtoul(text, &end, 10);
if (end == text || *end != '\0' || value == 0u || value > 65535u) {
return false;
}
value_out = static_cast<std::uint16_t>(value);
return true;
}
bool ParseU32(const char *text, std::uint32_t &value_out)
{
char *end = NULL;
unsigned long value = std::strtoul(text, &end, 10);
if (end == text || *end != '\0' || value == 0u || value > UINT32_MAX) {
return false;
}
value_out = static_cast<std::uint32_t>(value);
return true;
}
void PrintUsage(const char *program_name)
{
std::cerr << "Usage: " << program_name
<< " [dest_ip] [port] [count] [interval_ms] [timeout_ms] [save_path]\n"
<< "Default: dest_ip=" << kDefaultDestIp
<< " port=" << latency_wire::kDefaultPort
<< " count=" << latency_wire::kDefaultCount
<< " interval_ms=" << latency_wire::kDefaultIntervalMs
<< " timeout_ms=" << latency_wire::kDefaultTimeoutMs
<< " save_path=<none>\n";
}
class SocketFd {
public:
explicit SocketFd(int fd = -1) : fd_(fd) {}
~SocketFd()
{
if (fd_ >= 0) {
close(fd_);
}
}
int get() const { return fd_; }
private:
SocketFd(const SocketFd &);
SocketFd &operator=(const SocketFd &);
int fd_;
};
bool SetReceiveTimeout(int socket_fd, std::uint32_t timeout_ms)
{
struct timeval timeout;
timeout.tv_sec = static_cast<time_t>(timeout_ms / 1000u);
timeout.tv_usec = static_cast<suseconds_t>((timeout_ms % 1000u) * 1000u);
if (setsockopt(socket_fd, SOL_SOCKET, SO_RCVTIMEO, &timeout, sizeof(timeout)) < 0) {
std::cerr << "setsockopt SO_RCVTIMEO failed: " << std::strerror(errno) << "\n";
return false;
}
return true;
}
bool MakeDestAddress(const char *dest_ip,
std::uint16_t dest_port,
struct sockaddr_in &dest_addr)
{
std::memset(&dest_addr, 0, sizeof(dest_addr));
dest_addr.sin_family = AF_INET;
dest_addr.sin_port = htons(dest_port);
if (inet_pton(AF_INET, dest_ip, &dest_addr.sin_addr) != 1) {
std::cerr << "Invalid IPv4 address: " << dest_ip << "\n";
return false;
}
return true;
}
int OpenClientSocket(std::uint32_t timeout_ms)
{
int socket_fd = socket(AF_INET, SOCK_DGRAM, IPPROTO_UDP);
if (socket_fd < 0) {
std::cerr << "socket failed: " << std::strerror(errno) << "\n";
return -1;
}
int enable_broadcast = 1;
if (setsockopt(socket_fd,
SOL_SOCKET,
SO_BROADCAST,
&enable_broadcast,
sizeof(enable_broadcast)) < 0) {
std::cerr << "setsockopt SO_BROADCAST failed: " << std::strerror(errno) << "\n";
close(socket_fd);
return -1;
}
if (!SetReceiveTimeout(socket_fd, timeout_ms)) {
close(socket_fd);
return -1;
}
return socket_fd;
}
bool SendRequest(int socket_fd,
const struct sockaddr_in &dest_addr,
std::uint32_t seq,
std::uint64_t tx_ns)
{
latency_wire::LatencyFrame frame = {};
frame.magic = latency_wire::kMagic;
frame.version = latency_wire::kVersion;
frame.msg_type = latency_wire::kTypeRequest;
frame.seq = seq;
frame.master_tx_ns = tx_ns;
const std::array<std::uint8_t, latency_wire::kFrameWireSize> packet =
latency_wire::Encode(frame);
ssize_t sent = sendto(socket_fd,
packet.data(),
packet.size(),
0,
reinterpret_cast<const struct sockaddr *>(&dest_addr),
sizeof(dest_addr));
if (sent != static_cast<ssize_t>(packet.size())) {
std::cerr << "sendto failed: " << std::strerror(errno) << "\n";
return false;
}
return true;
}
bool ReceiveResponse(int socket_fd,
std::uint32_t expected_seq,
latency_wire::LatencyFrame &frame_out,
std::uint64_t &rx_ns_out,
struct sockaddr_in &from_addr_out)
{
std::array<std::uint8_t, latency_wire::kFrameWireSize> packet = {};
while (!g_stop_requested) {
struct sockaddr_in from_addr;
socklen_t from_len = sizeof(from_addr);
ssize_t received = recvfrom(socket_fd,
packet.data(),
packet.size(),
0,
reinterpret_cast<struct sockaddr *>(&from_addr),
&from_len);
const std::uint64_t rx_ns = MonotonicNs();
if (received < 0) {
return false;
}
if (received != static_cast<ssize_t>(packet.size())) {
continue;
}
latency_wire::LatencyFrame frame = latency_wire::Decode(packet.data());
if (!latency_wire::IsValid(frame, latency_wire::kTypeResponse)) {
continue;
}
if (frame.seq != expected_seq) {
continue;
}
frame_out = frame;
rx_ns_out = rx_ns;
from_addr_out = from_addr;
return true;
}
return false;
}
std::string AddressToText(const struct sockaddr_in &address)
{
char buffer[INET_ADDRSTRLEN] = {};
const char *text = inet_ntop(AF_INET, &address.sin_addr, buffer, sizeof(buffer));
return text != NULL ? std::string(text) : std::string("unknown");
}
double NsToUs(std::uint64_t value_ns)
{
return static_cast<double>(value_ns) / 1000.0;
}
struct DelaySample {
std::uint64_t rtt_ns;
std::uint64_t delay_ns;
};
std::uint64_t MedianNs(std::vector<std::uint64_t> values)
{
if (values.empty()) {
return 0;
}
std::sort(values.begin(), values.end());
const std::size_t mid = values.size() / 2u;
if ((values.size() % 2u) == 0u) {
return (values[mid - 1u] + values[mid]) / 2u;
}
return values[mid];
}
bool SaveCalibratedDelay(const char *save_path, std::uint64_t delay_ns)
{
if (save_path == NULL || save_path[0] == '\0') {
return true;
}
std::ofstream out(save_path);
if (!out) {
std::cerr << "save calibrated d failed: " << save_path << "\n";
return false;
}
out << delay_ns << "\n";
return true;
}
} // namespace
int main(int argc, char **argv)
{
const char *dest_ip = kDefaultDestIp;
std::uint16_t dest_port = latency_wire::kDefaultPort;
std::uint32_t probe_count = latency_wire::kDefaultCount;
std::uint32_t interval_ms = latency_wire::kDefaultIntervalMs;
std::uint32_t timeout_ms = latency_wire::kDefaultTimeoutMs;
const char *save_path = NULL;
if (argc > 7) {
PrintUsage(argv[0]);
return 2;
}
if (argc >= 2) {
dest_ip = argv[1];
}
if (argc >= 3 && !ParseU16(argv[2], dest_port)) {
PrintUsage(argv[0]);
return 2;
}
if (argc >= 4 && !ParseU32(argv[3], probe_count)) {
PrintUsage(argv[0]);
return 2;
}
if (argc >= 5 && !ParseU32(argv[4], interval_ms)) {
PrintUsage(argv[0]);
return 2;
}
if (argc >= 6 && !ParseU32(argv[5], timeout_ms)) {
PrintUsage(argv[0]);
return 2;
}
if (argc >= 7) {
save_path = argv[6];
}
InstallSignalHandlers();
struct sockaddr_in dest_addr;
if (!MakeDestAddress(dest_ip, dest_port, dest_addr)) {
return 1;
}
SocketFd socket_fd(OpenClientSocket(timeout_ms));
if (socket_fd.get() < 0) {
return 1;
}
std::cout << std::fixed << std::setprecision(3);
std::cout << "Latency probe master -> " << dest_ip << ":" << dest_port
<< " count=" << probe_count
<< " interval=" << interval_ms << "ms"
<< " timeout=" << timeout_ms << "ms\n";
std::uint32_t ok_count = 0;
std::uint32_t lost_count = 0;
std::uint64_t min_rtt_ns = std::numeric_limits<std::uint64_t>::max();
std::uint64_t max_rtt_ns = 0;
std::uint64_t sum_rtt_ns = 0;
std::uint64_t min_delay_ns = std::numeric_limits<std::uint64_t>::max();
std::uint64_t max_delay_ns = 0;
std::uint64_t sum_delay_ns = 0;
std::vector<DelaySample> samples;
samples.reserve(probe_count);
for (std::uint32_t seq = 0; seq < probe_count && !g_stop_requested; ++seq) {
const std::uint64_t tx_ns = MonotonicNs();
if (!SendRequest(socket_fd.get(), dest_addr, seq, tx_ns)) {
++lost_count;
SleepMs(interval_ms);
continue;
}
latency_wire::LatencyFrame reply = {};
std::uint64_t rx_ns = 0;
struct sockaddr_in from_addr;
if (!ReceiveResponse(socket_fd.get(), seq, reply, rx_ns, from_addr)) {
std::cout << "seq=" << seq << " timeout\n";
++lost_count;
SleepMs(interval_ms);
continue;
}
const std::uint64_t rtt_ns = rx_ns >= tx_ns ? rx_ns - tx_ns : 0;
const std::uint64_t slave_process_ns =
reply.slave_tx_ns >= reply.slave_rx_ns ?
reply.slave_tx_ns - reply.slave_rx_ns :
0;
const std::uint64_t net_rtt_ns =
rtt_ns > slave_process_ns ? rtt_ns - slave_process_ns : rtt_ns;
const std::uint64_t fixed_delay_ns = net_rtt_ns / 2u;
++ok_count;
sum_rtt_ns += rtt_ns;
sum_delay_ns += fixed_delay_ns;
samples.push_back(DelaySample{rtt_ns, fixed_delay_ns});
min_rtt_ns = std::min(min_rtt_ns, rtt_ns);
max_rtt_ns = std::max(max_rtt_ns, rtt_ns);
min_delay_ns = std::min(min_delay_ns, fixed_delay_ns);
max_delay_ns = std::max(max_delay_ns, fixed_delay_ns);
std::cout << "seq=" << seq
<< " from=" << AddressToText(from_addr)
<< " rtt=" << NsToUs(rtt_ns) << " us"
<< " slave_proc=" << NsToUs(slave_process_ns) << " us"
<< " ETH_FIXED_DELAY_NS=" << fixed_delay_ns
<< " (" << NsToUs(fixed_delay_ns) << " us)\n";
if (seq + 1u < probe_count) {
SleepMs(interval_ms);
}
}
if (ok_count > 0u) {
std::cout << "Summary: ok=" << ok_count
<< " lost=" << lost_count
<< " rtt_min/avg/max="
<< NsToUs(min_rtt_ns) << "/"
<< NsToUs(sum_rtt_ns / ok_count) << "/"
<< NsToUs(max_rtt_ns) << " us"
<< " delay_min/avg/max="
<< NsToUs(min_delay_ns) << "/"
<< NsToUs(sum_delay_ns / ok_count) << "/"
<< NsToUs(max_delay_ns) << " us\n";
std::vector<std::uint64_t> valid_delays;
valid_delays.reserve(samples.size());
for (std::size_t i = 0; i < samples.size(); ++i) {
if (samples[i].rtt_ns <= kCalibrateMaxRttNs &&
samples[i].delay_ns <= kCalibrateMaxDelayNs) {
valid_delays.push_back(samples[i].delay_ns);
}
}
const std::vector<std::uint64_t> *used_values = &valid_delays;
std::vector<std::uint64_t> all_delays;
if (valid_delays.empty()) {
all_delays.reserve(samples.size());
for (std::size_t i = 0; i < samples.size(); ++i) {
all_delays.push_back(samples[i].delay_ns);
}
used_values = &all_delays;
}
const std::uint64_t calibrated_delay_ns = MedianNs(*used_values);
const std::uint32_t dropped_count =
ok_count - static_cast<std::uint32_t>(valid_delays.size());
std::cout << "Calibration: valid=" << used_values->size()
<< " dropped=" << dropped_count
<< " rtt_limit=" << NsToUs(kCalibrateMaxRttNs) << " us"
<< " delay_limit=" << NsToUs(kCalibrateMaxDelayNs) << " us\n"
<< "D_CALIBRATED_NS=" << calibrated_delay_ns
<< " (" << NsToUs(calibrated_delay_ns) << " us)\n";
if (save_path != NULL) {
if (SaveCalibratedDelay(save_path, calibrated_delay_ns)) {
std::cout << "Saved D_CALIBRATED_NS to " << save_path << "\n";
} else {
return 1;
}
}
} else {
std::cout << "Summary: no response, check slave, firewall, port, and subnet.\n";
}
return ok_count > 0u ? 0 : 1;
}从机
latency_slave_echo.cpp
c
#include "latency_probe.hpp"
#include <arpa/inet.h>
#include <cerrno>
#include <csignal>
#include <cstdint>
#include <cstdlib>
#include <cstring>
#include <iostream>
#include <netinet/in.h>
#include <sys/socket.h>
#include <time.h>
#include <unistd.h>
namespace {
static const std::uint64_t kNsPerSec = 1000000000ull;
volatile sig_atomic_t g_stop_requested = 0;
void HandleStopSignal(int)
{
g_stop_requested = 1;
}
void InstallSignalHandlers()
{
struct sigaction action;
std::memset(&action, 0, sizeof(action));
action.sa_handler = HandleStopSignal;
sigemptyset(&action.sa_mask);
sigaction(SIGINT, &action, NULL);
sigaction(SIGTERM, &action, NULL);
}
std::uint64_t MonotonicNs()
{
struct timespec now;
clock_gettime(CLOCK_MONOTONIC, &now);
return static_cast<std::uint64_t>(now.tv_sec) * kNsPerSec +
static_cast<std::uint64_t>(now.tv_nsec);
}
bool ParseU16(const char *text, std::uint16_t &value_out)
{
char *end = NULL;
unsigned long value = std::strtoul(text, &end, 10);
if (end == text || *end != '\0' || value == 0u || value > 65535u) {
return false;
}
value_out = static_cast<std::uint16_t>(value);
return true;
}
void PrintUsage(const char *program_name)
{
std::cerr << "Usage: " << program_name << " [listen_port]\n"
<< "Default: listen_port=" << latency_wire::kDefaultPort << "\n";
}
class SocketFd {
public:
explicit SocketFd(int fd = -1) : fd_(fd) {}
~SocketFd()
{
if (fd_ >= 0) {
close(fd_);
}
}
int get() const { return fd_; }
private:
SocketFd(const SocketFd &);
SocketFd &operator=(const SocketFd &);
int fd_;
};
int OpenListenSocket(std::uint16_t listen_port)
{
int socket_fd = socket(AF_INET, SOCK_DGRAM, IPPROTO_UDP);
if (socket_fd < 0) {
std::cerr << "socket failed: " << std::strerror(errno) << "\n";
return -1;
}
int reuse = 1;
if (setsockopt(socket_fd, SOL_SOCKET, SO_REUSEADDR, &reuse, sizeof(reuse)) < 0) {
std::cerr << "setsockopt SO_REUSEADDR failed: " << std::strerror(errno) << "\n";
close(socket_fd);
return -1;
}
struct sockaddr_in listen_addr;
std::memset(&listen_addr, 0, sizeof(listen_addr));
listen_addr.sin_family = AF_INET;
listen_addr.sin_addr.s_addr = htonl(INADDR_ANY);
listen_addr.sin_port = htons(listen_port);
if (bind(socket_fd,
reinterpret_cast<const struct sockaddr *>(&listen_addr),
sizeof(listen_addr)) < 0) {
std::cerr << "bind port " << listen_port << " failed: " << std::strerror(errno) << "\n";
close(socket_fd);
return -1;
}
return socket_fd;
}
bool SendResponse(int socket_fd,
const struct sockaddr_in &master_addr,
const latency_wire::LatencyFrame &request,
std::uint64_t slave_rx_ns)
{
latency_wire::LatencyFrame response = request;
response.msg_type = latency_wire::kTypeResponse;
response.slave_rx_ns = slave_rx_ns;
response.slave_tx_ns = MonotonicNs();
const std::array<std::uint8_t, latency_wire::kFrameWireSize> packet =
latency_wire::Encode(response);
ssize_t sent = sendto(socket_fd,
packet.data(),
packet.size(),
0,
reinterpret_cast<const struct sockaddr *>(&master_addr),
sizeof(master_addr));
if (sent != static_cast<ssize_t>(packet.size())) {
std::cerr << "sendto failed: " << std::strerror(errno) << "\n";
return false;
}
return true;
}
std::string AddressToText(const struct sockaddr_in &address)
{
char buffer[INET_ADDRSTRLEN] = {};
const char *text = inet_ntop(AF_INET, &address.sin_addr, buffer, sizeof(buffer));
return text != NULL ? std::string(text) : std::string("unknown");
}
} // namespace
int main(int argc, char **argv)
{
std::uint16_t listen_port = latency_wire::kDefaultPort;
if (argc > 2) {
PrintUsage(argv[0]);
return 2;
}
if (argc == 2 && !ParseU16(argv[1], listen_port)) {
PrintUsage(argv[0]);
return 2;
}
InstallSignalHandlers();
SocketFd socket_fd(OpenListenSocket(listen_port));
if (socket_fd.get() < 0) {
return 1;
}
std::cout << "Latency probe slave echo listening on 0.0.0.0:" << listen_port << "\n"
<< "Press Ctrl+C to stop.\n";
std::uint64_t echo_count = 0;
while (!g_stop_requested) {
std::array<std::uint8_t, latency_wire::kFrameWireSize> packet = {};
struct sockaddr_in master_addr;
socklen_t master_len = sizeof(master_addr);
ssize_t received = recvfrom(socket_fd.get(),
packet.data(),
packet.size(),
0,
reinterpret_cast<struct sockaddr *>(&master_addr),
&master_len);
const std::uint64_t slave_rx_ns = MonotonicNs();
if (received < 0) {
if (errno == EINTR) {
continue;
}
std::cerr << "recvfrom failed: " << std::strerror(errno) << "\n";
break;
}
if (received != static_cast<ssize_t>(packet.size())) {
continue;
}
const latency_wire::LatencyFrame request = latency_wire::Decode(packet.data());
if (!latency_wire::IsValid(request, latency_wire::kTypeRequest)) {
continue;
}
if (SendResponse(socket_fd.get(), master_addr, request, slave_rx_ns)) {
++echo_count;
if (echo_count == 1u || echo_count % 100u == 0u) {
std::cout << "echo=" << echo_count
<< " from=" << AddressToText(master_addr)
<< ":" << ntohs(master_addr.sin_port)
<< " seq=" << request.seq << "\n";
}
}
}
std::cout << "Stopped.\n";
return 0;
}主机打印
bash
Latency probe master -> 255.255.255.255:5006 count=100 interval=30ms timeout=1000ms
seq=0 from=192.168.3.211 rtt=434.757 us slave_proc=4.374 us ETH_FIXED_DELAY_NS=215191 (215.191 us)
seq=1 from=192.168.3.211 rtt=228.317 us slave_proc=3.934 us ETH_FIXED_DELAY_NS=112191 (112.191 us)
seq=2 from=192.168.3.211 rtt=238.787 us slave_proc=3.550 us ETH_FIXED_DELAY_NS=117618 (117.618 us)
seq=3 from=192.168.3.211 rtt=231.195 us slave_proc=3.117 us ETH_FIXED_DELAY_NS=114039 (114.039 us)
seq=4 from=192.168.3.211 rtt=208.211 us slave_proc=3.323 us ETH_FIXED_DELAY_NS=102444 (102.444 us)
seq=5 from=192.168.3.211 rtt=170.040 us slave_proc=3.185 us ETH_FIXED_DELAY_NS=83427 (83.427 us)
seq=6 from=192.168.3.211 rtt=177.130 us slave_proc=3.206 us ETH_FIXED_DELAY_NS=86962 (86.962 us)
seq=7 from=192.168.3.211 rtt=182.046 us slave_proc=2.940 us ETH_FIXED_DELAY_NS=89553 (89.553 us从机打印
bash
root@ant:~# ./ming_net_sync_petalinux
Latency probe slave echo listening on 0.0.0.0:5006
Press Ctrl+C to stop.
echo=1 from=192.168.3.4:40495 seq=0
echo=100 from=192.168.3.4:40495 seq=99主从正式工作代码
主机周期广播同步帧
从机调整下次产生脉冲的时刻
从机统计过去100次主从时差的中位数(整体减去了首次时差)
实测PC做主机和zynq做主机区别不大
PC主机定时器是 用clock_gettime
ZYNQ主机定时器是从PL读的
帧格式
c
#pragma once
#include <array>
#include <cstddef>
#include <cstdint>
namespace sync_wire {
// 同步帧固定魔数,接收端用它过滤非本协议 UDP 包。
static const std::uint16_t kMagic = 0x4A42u;
// 当前同步协议版本号,主从版本不一致时可据此拒收。
static const std::uint16_t kVersion = 1u;
// 主机发送同步帧的周期,单位 ns,当前为 30 ms。
static const std::uint64_t kSendPeriodNs = 30000000ull;
// pulse_out 的目标输出周期,单位 ns,当前为 1 ms。
static const std::uint64_t kPulsePeriodNs = 1000000ull;
// 同步帧在线上的固定长度:2+2+4+8+8+4+4 = 32 字节。
static const std::size_t kFrameWireSize = 32u;
// UDP 同步帧的逻辑字段。线上格式固定为小端 32 字节,由 Encode() 手动编码。
struct SyncFrame {
// 固定魔数,用于判断是不是本协议的同步包。
std::uint16_t magic;
// 协议版本,用于识别主从程序的协议兼容性。
std::uint16_t version;
// 同步包序号,用于从机识别旧包或乱序包。
std::uint32_t seq;
// 主机发送该同步包时的主机时间,单位 ns。
std::uint64_t master_tx_ns;
// 主机期望所有从机对齐的下一次脉冲边沿时间,单位 ns。
std::uint64_t next_edge_ns;
// 主机同步包发送周期,单位 ns。
std::uint32_t sync_period_ns;
// pulse_out 脉冲周期,单位 ns。
std::uint32_t pulse_period_ns;
};
inline std:: AlignUpNs(std::uint64_t value, std::uint64_t period)
{
return ((value + period - 1u) / period) * period;
}
inline void PutLe16(std::uint8_t *dst, std::uint16_t value)
{
dst[0] = static_cast<std::uint8_t>(value & 0xffu);
dst[1] = static_cast<std::uint8_t>((value >> 8) & 0xffu);
}
inline void PutLe32(std::uint8_t *dst, std::uint32_t value)
{
dst[0] = static_cast<std::uint8_t>(value & 0xffu);
dst[1] = static_cast<std::uint8_t>((value >> 8) & 0xffu);
dst[2] = static_cast<std::uint8_t>((value >> 16) & 0xffu);
dst[3] = static_cast<std::uint8_t>((value >> 24) & 0xffu);
}
inline void PutLe64(std::uint8_t *dst, std::uint64_t value)
{
PutLe32(dst, static_cast<std::uint32_t>(value & 0xffffffffull));
PutLe32(dst + 4, static_cast<std::uint32_t>(value >> 32));
}
inline std::array<std::uint8_t, kFrameWireSize> Encode(const SyncFrame &frame)
{
std::array<std::uint8_t, kFrameWireSize> out = {};
PutLe16(out.data() + 0, frame.magic);
PutLe16(out.data() + 2, frame.version);
PutLe32(out.data() + 4, frame.seq);
PutLe64(out.data() + 8, frame.master_tx_ns);
PutLe64(out.data() + 16, frame.next_edge_ns);
PutLe32(out.data() + 24, frame.sync_period_ns);
PutLe32(out.data() + 28, frame.pulse_period_ns);
return out;
}
} // namespace sync_wirePC主机
c
#include "sync_frame.hpp"
#include <arpa/inet.h>
#include <cerrno>
#include <csignal>
#include <cstdint>
#include <cstdlib>
#include <cstring>
#include <iostream>
#include <netinet/in.h>
#include <sys/socket.h>
#include <time.h>
#include <unistd.h>
namespace {
static const char *kDefaultDestIp = "255.255.255.255";
//默认目标 UDP 端口
static const std::uint16_t kDefaultDestPort = 5005u;
//毫秒转纳秒
static const std::uint64_t kNsPerMs = 1000000ull;
//秒转纳秒
static const std::uint64_t kNsPerSec = 1000000000ull;
volatile sig_atomic_t g_stop_requested = 0;
void HandleStopSignal(int)
{
g_stop_requested = 1;
}
void InstallSignalHandlers()
{
struct sigaction action;
std::memset(&action, 0, sizeof(action));
action.sa_handler = HandleStopSignal;
sigemptyset(&action.sa_mask);
sigaction(SIGINT, &action, NULL);
sigaction(SIGTERM, &action, NULL);
}
std::uint64_t MonotonicNs()
{
struct timespec now;
clock_gettime(CLOCK_MONOTONIC, &now);
return static_cast<std::uint64_t>(now.tv_sec) * kNsPerSec +
static_cast<std::uint64_t>(now.tv_nsec);
}
void SleepUntilNs(std::uint64_t target_ns)
{
struct timespec target;
target.tv_sec = static_cast<time_t>(target_ns / kNsPerSec);
target.tv_nsec = static_cast<long>(target_ns % kNsPerSec);
while (!g_stop_requested) {
int result = clock_nanosleep(CLOCK_MONOTONIC, TIMER_ABSTIME, &target, NULL);
if (result == 0 || result != EINTR) {
return;
}
}
}
bool ParseU16(const char *text, std::uint16_t &value_out)
{
char *end = NULL;
unsigned long value = std::strtoul(text, &end, 10);
if (end == text || *end != '\0' || value == 0u || value > 65535u) {
return false;
}
value_out = static_cast<std::uint16_t>(value);
return true;
}
bool ParsePeriodMs(const char *text, std::uint64_t &period_ns_out)
{
char *end = NULL;
unsigned long value_ms = std::strtoul(text, &end, 10);
if (end == text || *end != '\0' || value_ms == 0u) {
return false;
}
period_ns_out = static_cast<std::uint64_t>(value_ms) * kNsPerMs;
return period_ns_out <= UINT32_MAX;
}
bool ParsePeriodNs(const char *text, std::uint64_t &period_ns_out)
{
char *end = NULL;
unsigned long long value_ns = std::strtoull(text, &end, 10);
if (end == text || *end != '\0' || value_ns == 0ull || value_ns > UINT32_MAX) {
return false;
}
period_ns_out = static_cast<std::uint64_t>(value_ns);
return true;
}
void PrintUsage(const char *program_name)
{
std::cerr << "Usage: " << program_name
<< " [broadcast_ip] [port] [sync_period_ms] [pulse_period_ns]\n"
<< "Default: " << program_name << " " << kDefaultDestIp << " "
<< kDefaultDestPort << " 30 " << sync_wire::kPulsePeriodNs << "\n";
}
class SocketFd {
public:
explicit SocketFd(int fd = -1) : fd_(fd) {}
~SocketFd()
{
if (fd_ >= 0) {
close(fd_);
}
}
int get() const { return fd_; }
private:
SocketFd(const SocketFd &);
SocketFd &operator=(const SocketFd &);
int fd_;
};
bool MakeDestAddress(const char *dest_ip,
std::uint16_t dest_port,
struct sockaddr_in &dest_addr)
{
std::memset(&dest_addr, 0, sizeof(dest_addr));
dest_addr.sin_family = AF_INET;
dest_addr.sin_port = htons(dest_port);
if (inet_pton(AF_INET, dest_ip, &dest_addr.sin_addr) != 1) {
std::cerr << "Invalid IPv4 address: " << dest_ip << "\n";
return false;
}
return true;
}
int OpenBroadcastSocket()
{
int socket_fd = socket(AF_INET, SOCK_DGRAM, IPPROTO_UDP);
if (socket_fd < 0) {
std::cerr << "socket failed: " << std::strerror(errno) << "\n";
return -1;
}
int enable_broadcast = 1;
if (setsockopt(socket_fd,
SOL_SOCKET,
SO_BROADCAST,
&enable_broadcast,
sizeof(enable_broadcast)) < 0) {
std::cerr << "setsockopt SO_BROADCAST failed: " << std::strerror(errno) << "\n";
close(socket_fd);
return -1;
}
return socket_fd;
}
bool SendSyncFrame(int socket_fd,
const struct sockaddr_in &dest_addr,
const sync_wire::SyncFrame &frame)
{
const std::array<std::uint8_t, sync_wire::kFrameWireSize> packet =
sync_wire::Encode(frame);
ssize_t sent = sendto(socket_fd,
packet.data(),
packet.size(),
0,
reinterpret_cast<const struct sockaddr *>(&dest_addr),
sizeof(dest_addr));
if (sent != static_cast<ssize_t>(packet.size())) {
std::cerr << "sendto failed: " << std::strerror(errno) << "\n";
return false;
}
return true;
}
} // namespace
int main(int argc, char **argv)
{
const char *dest_ip = kDefaultDestIp;
std::uint16_t dest_port = kDefaultDestPort;
std::uint64_t send_period_ns = sync_wire::kSendPeriodNs;
std::uint64_t pulse_period_ns = sync_wire::kPulsePeriodNs;
if (argc > 5) {
PrintUsage(argv[0]);
return 2;
}
if (argc >= 2) {
dest_ip = argv[1];
}
if (argc >= 3 && !ParseU16(argv[2], dest_port)) {
PrintUsage(argv[0]);
return 2;
}
if (argc >= 4 && !ParsePeriodMs(argv[3], send_period_ns)) {
PrintUsage(argv[0]);
return 2;
}
if (argc >= 5 && !ParsePeriodNs(argv[4], pulse_period_ns)) {
PrintUsage(argv[0]);
return 2;
}
InstallSignalHandlers();
struct sockaddr_in dest_addr;
if (!MakeDestAddress(dest_ip, dest_port, dest_addr)) {
return 1;
}
SocketFd socket_fd(OpenBroadcastSocket());
if (socket_fd.get() < 0) {
return 1;
}
std::cout << "UDP sync master sending to " << dest_ip << ":" << dest_port
<< " every " << (send_period_ns / kNsPerMs) << " ms\n"
<< "Pulse period: " << pulse_period_ns << " ns ("
<< (kNsPerSec / pulse_period_ns) << " Hz if period divides 1s)\n"
<< "Frame: magic=0x" << std::hex << sync_wire::kMagic << std::dec
<< " version=" << sync_wire::kVersion
<< " size=" << sync_wire::kFrameWireSize << " bytes\n"
<< "Master clock: PC Linux CLOCK_MONOTONIC\n"
<< "Press Ctrl+C to stop.\n";
std::uint32_t seq = 0;
std::uint64_t sent_count = 0;
std::uint64_t last_log_ns = 0;
std::uint64_t next_send_ns = MonotonicNs();
while (!g_stop_requested) {
SleepUntilNs(next_send_ns);
if (g_stop_requested) {
break;
}
const std::uint64_t tx_ns = MonotonicNs();
sync_wire::SyncFrame frame = {};
frame.magic = sync_wire::kMagic;
frame.version = sync_wire::kVersion;
frame.seq = seq++;
frame.master_tx_ns = tx_ns;
// 主站发的是"主站 1kHz 时间网格参考边沿",不是固定向后延迟很多毫秒的边沿。
// 从站收到后会按自己的 PL time_ns 把这个参考边沿整周期推到安全的未来时刻。
// 这样多个从站保持同一个相位网格,同时避免每次同步都跳过一串 1kHz 脉冲。
frame.next_edge_ns = sync_wire::AlignUpNs(tx_ns, pulse_period_ns);
frame.sync_period_ns = static_cast<std::uint32_t>(send_period_ns);
frame.pulse_period_ns = static_cast<std::uint32_t>(pulse_period_ns);
if (SendSyncFrame(socket_fd.get(), dest_addr, frame)) {
sent_count++;
}
if (sent_count == 1u || tx_ns - last_log_ns >= kNsPerSec) {
std::cout << "sent=" << sent_count
<< " seq=" << frame.seq
<< " master_tx_ns=" << frame.master_tx_ns
<< " next_edge_ns=" << frame.next_edge_ns
<< " pulse_period_ns=" << frame.pulse_period_ns << "\n";
last_log_ns = tx_ns;
}
next_send_ns += send_period_ns;
const std::uint64_t after_send_ns = MonotonicNs();
while (next_send_ns <= after_send_ns) {
next_send_ns += send_period_ns;
}
}
std::cout << "Stopped.\n";
return 0;
}ZYNQ主机
c
#include "sync_frame.hpp"
#include <arpa/inet.h>
#include <cerrno>
#include <csignal>
#include <cstddef>
#include <cstdint>
#include <cstring>
#include <fcntl.h>
#include <iostream>
#include <netinet/in.h>
#include <sys/mman.h>
#include <sys/socket.h>
#include <unistd.h>
namespace {
static const char *kDefaultDestIp = "255.255.255.255";
static const std::uint16_t kDefaultDestPort = 5005u;
static const std::uintptr_t kDefaultNsSyncBaseAddr = 0x43C00000u;
static const std::size_t kRegisterSpanBytes = 0x100u;
static const std::uint64_t kNsPerMs = 1000000ull;
static const std::uint64_t kNsPerSec = 1000000000ull;
static const std::uint64_t kMasterPulseStartAheadNs = 1000000ull;
static const std::uint64_t kSyncEdgeLeadNs = 10000000ull;
static const std::uint32_t kRegControl = 0x00u;
static const std::uint32_t kRegTimeLatchLow = 0x08u;
static const std::uint32_t kRegTimeLatchHigh = 0x0cu;
static const std::uint32_t kRegNextEdgeCfgLow = 0x10u;
static const std::uint32_t kRegNextEdgeCfgHigh = 0x14u;
static const std::uint32_t kRegCommand = 0x18u;
static const std::uint32_t kRegVersion = 0x1cu;
static const std::uint32_t kRegActiveEdgeLow = 0x20u;
static const std::uint32_t kRegActiveEdgeHigh = 0x24u;
static const std::uint32_t kControlCounterEnable = 0x00000001u;
static const std::uint32_t kControlPulseEnable = 0x00000002u;
static const std::uint32_t kCmdLatchTime = 0x00000001u;
static const std::uint32_t kCmdApplyNextEdge = 0x00000002u;
volatile sig_atomic_t g_stop_requested = 0;
void HandleStopSignal(int)
{
g_stop_requested = 1;
}
void InstallSignalHandlers()
{
struct sigaction action;
std::memset(&action, 0, sizeof(action));
action.sa_handler = HandleStopSignal;
sigemptyset(&action.sa_mask);
sigaction(SIGINT, &action, NULL);
sigaction(SIGTERM, &action, NULL);
}
class DevMemMap {
public:
DevMemMap() :
fd_(-1),
mapped_base_(MAP_FAILED),
mapped_length_(0),
regs_(NULL)
{
}
~DevMemMap()
{
Close();
}
bool Open(std::uintptr_t base_addr, std::size_t span_bytes)
{
const long page_size_long = sysconf(_SC_PAGESIZE);
if (page_size_long <= 0) {
std::cerr << "sysconf(_SC_PAGESIZE) failed: " << std::strerror(errno) << "\n";
return false;
}
const std::uintptr_t page_size = static_cast<std::uintptr_t>(page_size_long);
const std::uintptr_t page_mask = ~(page_size - 1u);
const std::uintptr_t page_base = base_addr & page_mask;
const std::uintptr_t page_offset = base_addr - page_base;
mapped_length_ = RoundUp(page_offset + span_bytes, page_size);
fd_ = open("/dev/mem", O_RDWR | O_SYNC);
if (fd_ < 0) {
std::cerr << "open /dev/mem failed: " << std::strerror(errno) << "\n";
return false;
}
mapped_base_ = mmap(NULL,
mapped_length_,
PROT_READ | PROT_WRITE,
MAP_SHARED,
fd_,
static_cast<off_t>(page_base));
if (mapped_base_ == MAP_FAILED) {
std::cerr << "mmap 0x" << std::hex << page_base << std::dec
<< " failed: " << std::strerror(errno) << "\n";
close(fd_);
fd_ = -1;
return false;
}
regs_ = reinterpret_cast<volatile std::uint32_t *>(
static_cast<char *>(mapped_base_) + page_offset);
return true;
}
void Close()
{
if (mapped_base_ != MAP_FAILED) {
munmap(mapped_base_, mapped_length_);
mapped_base_ = MAP_FAILED;
mapped_length_ = 0;
}
if (fd_ >= 0) {
close(fd_);
fd_ = -1;
}
regs_ = NULL;
}
void Write32(std::uint32_t offset, std::uint32_t value)
{
regs_[offset / sizeof(std::uint32_t)] = value;
}
std::uint32_t Read32(std::uint32_t offset) const
{
return regs_[offset / sizeof(std::uint32_t)];
}
private:
static std::size_t RoundUp(std::size_t value, std::size_t alignment)
{
return (value + alignment - 1u) & ~(alignment - 1u);
}
DevMemMap(const DevMemMap &);
DevMemMap &operator=(const DevMemMap &);
int fd_;
void *mapped_base_;
std::size_t mapped_length_;
volatile std::uint32_t *regs_;
};
class SocketFd {
public:
explicit SocketFd(int fd = -1) : fd_(fd) {}
~SocketFd()
{
if (fd_ >= 0) {
close(fd_);
}
}
int get() const { return fd_; }
private:
SocketFd(const SocketFd &);
SocketFd &operator=(const SocketFd &);
int fd_;
};
std::uint64_t MakeU64(std::uint32_t high, std::uint32_t low)
{
return (static_cast<std::uint64_t>(high) << 32) | static_cast<std::uint64_t>(low);
}
std::uint64_t ReadPlTimeNs(DevMemMap *registers)
{
registers->Write32(kRegCommand, kCmdLatchTime);
const std::uint32_t low = registers->Read32(kRegTimeLatchLow);
const std::uint32_t high = registers->Read32(kRegTimeLatchHigh);
return MakeU64(high, low);
}
std::uint64_t ReadActiveEdgeNs(const DevMemMap ®isters)
{
const std::uint32_t low = registers.Read32(kRegActiveEdgeLow);
const std::uint32_t high = registers.Read32(kRegActiveEdgeHigh);
return MakeU64(high, low);
}
void WriteNextEdgeNs(DevMemMap *registers, std::uint64_t next_edge_ns)
{
registers->Write32(kRegNextEdgeCfgLow, static_cast<std::uint32_t>(next_edge_ns));
registers->Write32(kRegNextEdgeCfgHigh, static_cast<std::uint32_t>(next_edge_ns >> 32));
registers->Write32(kRegCommand, kCmdApplyNextEdge);
}
bool CheckPlVersion(const DevMemMap ®isters, std::uintptr_t base_addr)
{
const std::uint32_t version = registers.Read32(kRegVersion);
std::cout << "PL VERSION = 0x" << std::hex << version << std::dec << "\n";
if (version == 0u || version == 0xffffffffu) {
std::cerr << "ERROR: AXI read failed. Check PL base address 0x"
<< std::hex << base_addr << std::dec << " and bitstream.\n";
return false;
}
return true;
}
std::uint64_t ScheduleMasterPulse(DevMemMap *registers, std::uint64_t pulse_period_ns)
{
registers->Write32(kRegControl, kControlCounterEnable);
usleep(1000);
const std::uint64_t now_ns = ReadPlTimeNs(registers);
const std::uint64_t first_edge_ns =
sync_wire::AlignUpNs(now_ns + kMasterPulseStartAheadNs, pulse_period_ns);
WriteNextEdgeNs(registers, first_edge_ns);
registers->Write32(kRegControl, kControlCounterEnable | kControlPulseEnable);
return first_edge_ns;
}
std::uint64_t PickFutureMasterEdgeNs(const DevMemMap ®isters,
std::uint64_t tx_ns,
std::uint64_t pulse_period_ns)
{
std::uint64_t edge_ns = ReadActiveEdgeNs(registers);
const std::uint64_t min_edge_ns = tx_ns + kSyncEdgeLeadNs;
if (edge_ns == 0u) {
edge_ns = sync_wire::AlignUpNs(min_edge_ns, pulse_period_ns);
}
while (edge_ns < min_edge_ns) {
edge_ns += pulse_period_ns;
}
return edge_ns;
}
void WaitUntilPlNs(DevMemMap *registers, std::uint64_t target_ns)
{
while (!g_stop_requested) {
const std::uint64_t now_ns = ReadPlTimeNs(registers);
if (now_ns >= target_ns) {
return;
}
const std::uint64_t remain_ns = target_ns - now_ns;
if (remain_ns > 2000000ull) {
usleep(1000);
} else if (remain_ns > 200000ull) {
usleep(50);
}
}
}
bool MakeDestAddress(const char *dest_ip,
std::uint16_t dest_port,
struct sockaddr_in &dest_addr)
{
std::memset(&dest_addr, 0, sizeof(dest_addr));
dest_addr.sin_family = AF_INET;
dest_addr.sin_port = htons(dest_port);
if (inet_pton(AF_INET, dest_ip, &dest_addr.sin_addr) != 1) {
std::cerr << "Invalid IPv4 address: " << dest_ip << "\n";
return false;
}
return true;
}
int OpenBroadcastSocket()
{
int socket_fd = socket(AF_INET, SOCK_DGRAM, IPPROTO_UDP);
if (socket_fd < 0) {
std::cerr << "socket failed: " << std::strerror(errno) << "\n";
return -1;
}
int enable_broadcast = 1;
if (setsockopt(socket_fd,
SOL_SOCKET,
SO_BROADCAST,
&enable_broadcast,
sizeof(enable_broadcast)) < 0) {
std::cerr << "setsockopt SO_BROADCAST failed: " << std::strerror(errno) << "\n";
close(socket_fd);
return -1;
}
return socket_fd;
}
bool SendSyncFrame(int socket_fd,
const struct sockaddr_in &dest_addr,
const sync_wire::SyncFrame &frame)
{
const std::array<std::uint8_t, sync_wire::kFrameWireSize> packet =
sync_wire::Encode(frame);
ssize_t sent = sendto(socket_fd,
packet.data(),
packet.size(),
0,
reinterpret_cast<const struct sockaddr *>(&dest_addr),
sizeof(dest_addr));
if (sent != static_cast<ssize_t>(packet.size())) {
std::cerr << "sendto failed: " << std::strerror(errno) << "\n";
return false;
}
return true;
}
} // namespace
int main()
{
const char *dest_ip = kDefaultDestIp;
const std::uint16_t dest_port = kDefaultDestPort;
const std::uint64_t send_period_ns = sync_wire::kSendPeriodNs;
const std::uint64_t pulse_period_ns = sync_wire::kPulsePeriodNs;
const std::uintptr_t base_addr = kDefaultNsSyncBaseAddr;
InstallSignalHandlers();
DevMemMap registers;
if (!registers.Open(base_addr, kRegisterSpanBytes)) {
return 1;
}
if (!CheckPlVersion(registers, base_addr)) {
return 1;
}
const std::uint64_t master_first_edge_ns =
ScheduleMasterPulse(®isters, pulse_period_ns);
struct sockaddr_in dest_addr;
if (!MakeDestAddress(dest_ip, dest_port, dest_addr)) {
return 1;
}
SocketFd socket_fd(OpenBroadcastSocket());
if (socket_fd.get() < 0) {
return 1;
}
std::cout << "UDP sync master broadcasting to " << dest_ip << ":" << dest_port
<< " every " << (send_period_ns / kNsPerMs) << " ms\n"
<< "Pulse period: " << pulse_period_ns << " ns ("
<< (kNsPerSec / pulse_period_ns) << " Hz if period divides 1s)\n"
<< "Frame: magic=0x" << std::hex << sync_wire::kMagic << std::dec
<< " version=" << sync_wire::kVersion
<< " size=" << sync_wire::kFrameWireSize << " bytes\n"
<< "Master clock: PL 64-bit time_ns at base 0x"
<< std::hex << base_addr << std::dec << "\n"
<< "Master local pulse_out is enabled, first_edge_ns="
<< master_first_edge_ns << "\n"
<< "UDP next_edge_ns comes from PL active_edge grid with "
<< (kSyncEdgeLeadNs / kNsPerMs) << " ms lead\n"
<< "Press Ctrl+C to stop.\n";
std::uint32_t seq = 0;
std::uint64_t sent_count = 0;
std::uint64_t last_log_ns = 0;
std::uint64_t next_send_ns = ReadPlTimeNs(®isters);
while (!g_stop_requested) {
WaitUntilPlNs(®isters, next_send_ns);
if (g_stop_requested) {
break;
}
const std::uint64_t tx_ns = ReadPlTimeNs(®isters);
sync_wire::SyncFrame frame = {};
frame.magic = sync_wire::kMagic;
frame.version = sync_wire::kVersion;
frame.seq = seq++;
frame.master_tx_ns = tx_ns;
// 主站发的是"主站 1kHz 时间网格参考边沿",不是固定向后延迟很多毫秒的边沿。
// 从站收到后会按自己的 PL time_ns 把这个参考边沿整周期推到安全的未来时刻。
// 这样多个从站保持同一个相位网格,同时避免每次同步都跳过一串 1kHz 脉冲。
frame.next_edge_ns = PickFutureMasterEdgeNs(registers,
tx_ns,
pulse_period_ns);
frame.sync_period_ns = static_cast<std::uint32_t>(send_period_ns);
frame.pulse_period_ns = static_cast<std::uint32_t>(pulse_period_ns);
if (SendSyncFrame(socket_fd.get(), dest_addr, frame)) {
sent_count++;
}
if (sent_count == 1u || tx_ns - last_log_ns >= kNsPerSec) {
std::cout << "sent=" << sent_count
<< " seq=" << frame.seq
<< " master_tx_ns=" << frame.master_tx_ns
<< " next_edge_ns=" << frame.next_edge_ns
<< " pulse_period_ns=" << frame.pulse_period_ns << "\n";
last_log_ns = tx_ns;
}
next_send_ns += send_period_ns;
const std::uint64_t after_send_ns = ReadPlTimeNs(®isters);
while (next_send_ns <= after_send_ns) {
next_send_ns += send_period_ns;
}
}
std::cout << "Stopped.\n";
return 0;
}zynq从机
在计算主从时差,使用了固定的时延 kDefaultEthFixedDelayNs= 95000ll; (95ms)
这个数没影响从机们的脉冲边沿对齐
slave_master_diff_median_us 计算过去主从时差中位数
因为主从时钟不在同一个时钟域
测得 slave_master_diff_median_us 基本在均匀单调变化
main.cpp
c
#include <arpa/inet.h>
#include <algorithm>
#include <cerrno>
#include <csignal>
#include <cstddef>
#include <cstdint>
#include <cstdio>
#include <cstdlib>
#include <cstring>
#include <fcntl.h>
#include <netinet/in.h>
#include <poll.h>
#include <sys/mman.h>
#include <sys/socket.h>
#include <unistd.h>
// ============================================================
// Linux UDP 从机程序
// ------------------------------------------------------------
// 作用:
// 1. 通过 UDP 接收主机发来的同步包 SyncFrame。
// 2. 通过 /dev/mem 访问 PL 里的 AXI-Lite 寄存器。
// 3. 收到 UDP 包后,立即读取 PL 的 64 位 time_ns 作为从机接收时刻。
// 4. 根据主机时间、固定链路延时 d、从机 PL 时间,计算 PL 下次 pulse_out 时刻。
// 5. 把计算出的 next_edge_ns 写入 PL,由 PL 在精确时刻输出 pulse_out。
//
// 重要原则:
// - 从机同步时间基准只使用 PL 的 64 位 time_ns。
// - Linux 不提供同步时间,只负责收 UDP、算数、写寄存器。
// - Linux 调度会影响"recvfrom 返回到读 PL 时间"的延迟,所以极限精度
// 还需要硬件 RX timestamp;但当前版本先用软件方式验证链路和逻辑。
// ============================================================
// PL AXI-Lite 默认基地址。Vivado Address Editor 里如果改了地址,这里运行参数也要改。
static const std::uintptr_t kDefaultNsSyncBaseAddr = 0x43C00000u;
// 映射 AXI-Lite 寄存器窗口大小。当前寄存器只用到 0x24,映射 0x100 足够。
static const std::size_t kRegisterSpanBytes = 0x100u;
// UDP 同步端口。主机往这个端口发同步包,从机绑定 0.0.0.0:5005 接收。
static const std::uint16_t kDefaultSyncPort = 5005u;
// 默认固定以太网单向延时 d,单位 ns。
// 这个值来自主机 RTT 测试的大致估计,实际项目建议开机自动测试后传进来。
static const std::int64_t kDefaultEthFixedDelayNs = 95000ll;
// 默认 pulse 周期,单位 ns。1,000,000 ns = 1 ms。
// 如果主机同步包里 pulse_period_ns 为 0,就使用这个默认值。
static const std::uint64_t kDefaultPulsePeriodNs = 1000000ull;
// 为了避免"刚写完 next_edge,PL 已经错过这个时刻",要求下次脉冲至少在当前 PL 时间后 1ms。
static const std::uint64_t kMinScheduleAheadNs = 1000000ull;
// PL 计数器当前按 10ns 一个 tick 设计,所以写给 PL 的脉冲时刻向上对齐到 10ns。
static const std::uint64_t kPlTickNs = 10ull;
// PS 调试输出翻转周期。这里也用 PL time_ns 计时,不使用 Linux 时钟。
static const std::uint64_t kDebugTogglePeriodNs = 500000000ull;
// 日志打印节流周期。避免每个 UDP 包都打印,把终端刷爆。
static const std::uint64_t kLogPeriodNs = 1000000000ull;
// 保存"从机 PL 接收时间戳 - 主机发送时间戳"的历史样本,用来计算中位数。
// 100 个样本在 30ms 同步周期下约等于最近 3 秒,现场观察响应更快。
static const std::size_t kTimestampDiffHistorySize = 100u;
// poll 等待 UDP 的超时时间。即使没有 UDP 包,也会周期性醒来,用 PL 时间翻转 ps_debug_out。
static const int kIdlePollTimeoutMs = 10;
// 同步包头校验字段,防止误把其他 UDP 数据当成同步包。
static const std::uint16_t kSyncMagic = 0x4A42u;
// 同步协议版本号。主从版本不一致时,从机会丢弃该包。
static const std::uint16_t kSyncVersion = 1u;
// 当前 SyncFrame 线上的固定长度:2+2+4+8+8+4+4 = 32 字节。
static const std::size_t kSyncFrameWireSize = 32u;
// ============================================================
// PL AXI-Lite 寄存器偏移
// ------------------------------------------------------------
// 这些偏移必须和 verilog/axi_lite_ns_sync_pulse.v 里的寄存器表保持一致。
// ============================================================
// CONTROL:
// bit0 = counter_enable,允许 PL 64 位 time_ns 计数器运行
// bit1 = pulse_enable,允许 PL 到点输出 pulse_out
// bit2 = ps_debug_out,PS 软件控制的调试 IO
static const std::uint32_t kRegControl = 0x00u;
// STATUS: 只读状态寄存器,包含 pulse_out、counter_en、pulse_en 等状态位。
static const std::uint32_t kRegStatus = 0x04u;
// TIME_LATCH_LOW/HIGH:
// PS 写 COMMAND.bit0 后,PL 把当前 64 位 time_ns 锁存到这两个寄存器。
// PS 读这两个寄存器,得到同一时刻的稳定 64 位时间。
static const std::uint32_t kRegTimeLatchLow = 0x08u;
static const std::uint32_t kRegTimeLatchHigh = 0x0cu;
// NEXT_EDGE_CFG_LOW/HIGH:
// PS 先把"下次脉冲时刻"写到这两个配置寄存器。
// 再写 COMMAND.bit1,PL 才把配置值应用到 active next_edge_ns。
static const std::uint32_t kRegNextEdgeCfgLow = 0x10u;
static const std::uint32_t kRegNextEdgeCfgHigh = 0x14u;
// COMMAND:
// bit0 = latch time_ns
// bit1 = apply next_edge_cfg_ns
// 这是写 1 触发型命令寄存器,不需要保持。
static const std::uint32_t kRegCommand = 0x18u;
// VERSION: 用来粗略确认 AXI-Lite 地址和 bitstream 是对的。
static const std::uint32_t kRegVersion = 0x1cu;
// ACTIVE_EDGE_LOW/HIGH:
// 当前 PL 正在使用的下次脉冲时刻,可用于确认 PS 写入是否生效。
static const std::uint32_t kRegActiveEdgeLow = 0x20u;
static const std::uint32_t kRegActiveEdgeHigh = 0x24u;
// CONTROL 位定义。
static const std::uint32_t kControlCounterEnable = 0x00000001u;
static const std::uint32_t kControlPulseEnable = 0x00000002u;
static const std::uint32_t kControlPsDebugOut = 0x00000004u;
// STATUS 位定义。
static const std::uint32_t kStatusPulseOut = 0x00000001u;
static const std::uint32_t kStatusCounterEnable = 0x00000002u;
static const std::uint32_t kStatusPulseEnable = 0x00000004u;
static const std::uint32_t kStatusTimeLatchValid = 0x00000008u;
static const std::uint32_t kStatusNextEdgeValid = 0x00000010u;
static const std::uint32_t kStatusPsDebugOut = 0x00000020u;
// COMMAND 位定义。
static const std::uint32_t kCmdLatchTime = 0x00000001u;
static const std::uint32_t kCmdApplyNextEdge = 0x00000002u;
// Ctrl+C / kill 退出标志。信号处理函数里只改这个简单变量,避免做复杂操作。
static volatile std::sig_atomic_t g_stop_requested = 0;
// 64 位时间差样本环形数组:
// timestamp_diff_ns = local_rx_ns - master_tx_ns
// 其中 local_rx_ns 来自从机 PL 64 位 time_ns,master_tx_ns 来自主站 UDP 包。
static std::int64_t g_timestamp_diff_history[kTimestampDiffHistorySize];
static std::int64_t g_timestamp_diff_sort_buffer[kTimestampDiffHistorySize];
static std::size_t g_timestamp_diff_write_index = 0u;
static std::size_t g_timestamp_diff_count = 0u;
static bool g_timestamp_diff_base_valid = false;
static std::int64_t g_timestamp_diff_base_ns = 0;
// UDP 同步包的内存结构说明。
// 注意:实际解包没有直接 reinterpret_cast,因为不同 CPU/编译器可能有对齐和大小端问题。
// 下面 DecodeSyncFrame() 会按小端字节序手动解析线上 32 字节数据。
struct SyncFrame {
// 固定魔数,用于判断是不是我们的同步包。
std::uint16_t magic;
// 协议版本,防止主从程序版本不一致。
std::uint16_t version;
// 包序号,从机只接受递增序号,旧包/乱序包会被丢弃。
std::uint32_t seq;
// 主机发送该同步包时的主机时间,单位 ns。
std::uint64_t master_tx_ns;
// 主机希望所有从机共同输出的"下一次脉冲时刻",单位 ns,属于主机时间域。
std::uint64_t next_edge_ns;
// 主机同步包发送周期,单位 ns。当前从机只是解析保留,方便以后调试/扩展。
std::uint32_t sync_period_ns;
// pulse_out 周期,单位 ns。从机会用它把太近/已过期的边沿向后推。
std::uint32_t pulse_period_ns;
};
// 处理退出信号:只设置停止标志,主循环看到后再安全退出。
static void HandleStopSignal(int)
{
// 这里只置位,主循环看到后安全退出并关闭 pulse_out。
g_stop_requested = 1;
}
// 解析命令行里的 PL AXI-Lite 基地址,支持十进制或 0x 前缀十六进制。
static bool ParseBaseAddress(const char *text, std::uintptr_t *base_addr_out)
{
char *end = NULL;
unsigned long long value = std::strtoull(text, &end, 0);
if (end == text || *end != '\0') {
return false;
}
*base_addr_out = static_cast<std::uintptr_t>(value);
return true;
}
// 解析 1~65535 范围内的 UDP 端口号。
static bool ParseU16(const char *text, std::uint16_t *value_out)
{
char *end = NULL;
unsigned long value = std::strtoul(text, &end, 0);
if (end == text || *end != '\0' || value == 0u || value > 65535u) {
return false;
}
*value_out = static_cast<std::uint16_t>(value);
return true;
}
// 解析 64 位有符号整数参数,例如固定链路延时 ns。
static bool ParseI64(const char *text, std::int64_t *value_out)
{
char *end = NULL;
long long value = std::strtoll(text, &end, 0);
if (end == text || *end != '\0') {
return false;
}
*value_out = static_cast<std::int64_t>(value);
return true;
}
// RAII 文件描述符包装类,离开作用域时自动 close。
class Fd {
public:
explicit Fd(int fd = -1) : fd_(fd) {}
~Fd()
{
if (fd_ >= 0) {
close(fd_);
}
}
int get() const { return fd_; }
private:
// 禁止拷贝,防止两个 Fd 对象析构时重复 close 同一个 fd。
Fd(const Fd &);
Fd &operator=(const Fd &);
int fd_;
};
// /dev/mem 映射类:
// - Open() 把 PL AXI-Lite 物理地址映射到 Linux 用户态虚拟地址。
// - Read32()/Write32() 按 32 位访问寄存器。
// - 析构时自动 munmap/close。
class DevMemMap {
public:
DevMemMap() :
fd_(-1),
mapped_base_(MAP_FAILED),
mapped_length_(0),
regs_(NULL)
{
}
~DevMemMap()
{
Close();
}
bool Open(std::uintptr_t base_addr, std::size_t span_bytes)
{
// mmap 必须按页对齐。AXI 基地址不一定刚好等于页起始地址,所以要计算页内偏移。
const long page_size_long = sysconf(_SC_PAGESIZE);
if (page_size_long <= 0) {
std::fprintf(stderr, "sysconf(_SC_PAGESIZE) failed: %s\n", std::strerror(errno));
return false;
}
const std::uintptr_t page_size = static_cast<std::uintptr_t>(page_size_long);
const std::uintptr_t page_mask = ~(page_size - 1u);
const std::uintptr_t page_base = base_addr & page_mask;
const std::uintptr_t page_offset = base_addr - page_base;
mapped_length_ = RoundUp(page_offset + span_bytes, page_size);
fd_ = open("/dev/mem", O_RDWR | O_SYNC);
if (fd_ < 0) {
std::fprintf(stderr, "open /dev/mem failed: %s\n", std::strerror(errno));
return false;
}
mapped_base_ = mmap(NULL,
mapped_length_,
PROT_READ | PROT_WRITE,
MAP_SHARED,
fd_,
static_cast<off_t>(page_base));
if (mapped_base_ == MAP_FAILED) {
std::fprintf(stderr, "mmap 0x%llx failed: %s\n",
static_cast<unsigned long long>(page_base),
std::strerror(errno));
close(fd_);
fd_ = -1;
return false;
}
regs_ = reinterpret_cast<volatile std::uint32_t *>(
static_cast<char *>(mapped_base_) + page_offset);
return true;
}
void Close()
{
if (mapped_base_ != MAP_FAILED) {
munmap(mapped_base_, mapped_length_);
mapped_base_ = MAP_FAILED;
mapped_length_ = 0;
}
if (fd_ >= 0) {
close(fd_);
fd_ = -1;
}
regs_ = NULL;
}
void Write32(std::uint32_t offset, std::uint32_t value)
{
// volatile 保证编译器不会把寄存器访问优化掉。
regs_[offset / sizeof(std::uint32_t)] = value;
}
std::uint32_t Read32(std::uint32_t offset) const
{
return regs_[offset / sizeof(std::uint32_t)];
}
private:
static std::size_t RoundUp(std::size_t value, std::size_t alignment)
{
// 向上取整到页大小,确保 mmap 覆盖完整寄存器窗口。
return (value + alignment - 1u) & ~(alignment - 1u);
}
// 禁止拷贝,避免多个对象管理同一块 mmap。
DevMemMap(const DevMemMap &);
DevMemMap &operator=(const DevMemMap &);
int fd_;
void *mapped_base_;
std::size_t mapped_length_;
volatile std::uint32_t *regs_;
};
// 从小端字节序读取 16 位整数。
static std::uint16_t GetLe16(const std::uint8_t *src)
{
// 同步包按小端格式发送:低字节在前。
return static_cast<std::uint16_t>(src[0] | (static_cast<std::uint16_t>(src[1]) << 8));
}
// 从小端字节序读取 32 位整数。
static std::uint32_t GetLe32(const std::uint8_t *src)
{
return static_cast<std::uint32_t>(src[0]) |
(static_cast<std::uint32_t>(src[1]) << 8) |
(static_cast<std::uint32_t>(src[2]) << 16) |
(static_cast<std::uint32_t>(src[3]) << 24);
}
// 从小端字节序读取 64 位整数。
static std::uint64_t GetLe64(const std::uint8_t *src)
{
return static_cast<std::uint64_t>(GetLe32(src)) |
(static_cast<std::uint64_t>(GetLe32(src + 4)) << 32);
}
// 将线上 32 字节同步包解码成 SyncFrame 字段。
static SyncFrame DecodeSyncFrame(const std::uint8_t *packet)
{
// 按固定偏移解包,避免结构体 padding 和 CPU 大小端带来的坑。
SyncFrame frame;
frame.magic = GetLe16(packet + 0);
frame.version = GetLe16(packet + 2);
frame.seq = GetLe32(packet + 4);
frame.master_tx_ns = GetLe64(packet + 8);
frame.next_edge_ns = GetLe64(packet + 16);
frame.sync_period_ns = GetLe32(packet + 24);
frame.pulse_period_ns = GetLe32(packet + 28);
return frame;
}
// 检查同步包魔数和协议版本是否匹配。
static bool IsValidSyncFrame(const SyncFrame &frame)
{
// 只检查魔数和版本。包长在调用前已经检查为 32 字节。
return frame.magic == kSyncMagic && frame.version == kSyncVersion;
}
// 把高/低 32 位寄存器值拼成 64 位时间。
static std::uint64_t MakeU64(std::uint32_t high, std::uint32_t low)
{
return (static_cast<std::uint64_t>(high) << 32) | static_cast<std::uint64_t>(low);
}
// 触发 PL 锁存并读取当前 64 位 time_ns。
static std::uint64_t ReadTimeNs(DevMemMap *registers)
{
// 触发 PL 锁存当前 64 位 time_ns。
// 这样 PS 读 low/high 时不会遇到低 32 位翻转导致的"撕裂"问题。
registers->Write32(kRegCommand, kCmdLatchTime);
// 读取刚刚锁存的同一时刻的 low/high。
const std::uint32_t low = registers->Read32(kRegTimeLatchLow);
const std::uint32_t high = registers->Read32(kRegTimeLatchHigh);
return MakeU64(high, low);
}
// 读取 PL 当前真正生效的下一次脉冲边沿时间。
static std::uint64_t ReadActiveEdgeNs(const DevMemMap ®isters)
{
// 读取 PL 当前真正生效的下次脉冲时刻,用于日志确认。
const std::uint32_t low = registers.Read32(kRegActiveEdgeLow);
const std::uint32_t high = registers.Read32(kRegActiveEdgeHigh);
return MakeU64(high, low);
}
// 写入新的下一次脉冲边沿,并提交给 PL 生效。
static void WriteNextEdgeNs(DevMemMap *registers, std::uint64_t next_edge_ns)
{
// 先写 64 位配置值,再发 apply 命令。PL 看到 apply 后才切换 active next_edge_ns。
registers->Write32(kRegNextEdgeCfgLow, static_cast<std::uint32_t>(next_edge_ns));
registers->Write32(kRegNextEdgeCfgHigh, static_cast<std::uint32_t>(next_edge_ns >> 32));
registers->Write32(kRegCommand, kCmdApplyNextEdge);
}
// 按高低 32 位十六进制和毫秒值打印 64 位时间。
static void PrintU64(const char *name, std::uint64_t value)
{
std::printf("%s = 0x%08x_%08x (%llu ms)\n",
name,
static_cast<unsigned int>(value >> 32),
static_cast<unsigned int>(value),
static_cast<unsigned long long>(value / 1000000ull));
}
// 打印 PL 状态寄存器的原始值和各状态位。
static void DumpStatus(const DevMemMap ®isters)
{
const std::uint32_t status = registers.Read32(kRegStatus);
std::printf("STATUS = 0x%08x", status);
std::printf(" pulse_out=%d", (status & kStatusPulseOut) ? 1 : 0);
std::printf(" counter_en=%d", (status & kStatusCounterEnable) ? 1 : 0);
std::printf(" pulse_en=%d", (status & kStatusPulseEnable) ? 1 : 0);
std::printf(" latch_valid=%d", (status & kStatusTimeLatchValid) ? 1 : 0);
std::printf(" next_edge_valid=%d", (status & kStatusNextEdgeValid) ? 1 : 0);
std::printf(" ps_debug_out=%d\n", (status & kStatusPsDebugOut) ? 1 : 0);
}
// 读取 VERSION 寄存器,确认 AXI-Lite 映射和 bitstream 可访问。
static bool CheckVersion(const DevMemMap ®isters, std::uintptr_t base_addr)
{
// 如果 VERSION 读出来是 0 或 0xffffffff,通常说明基地址不对、PL 没加载或 AXI 没通。
const std::uint32_t version = registers.Read32(kRegVersion);
std::printf("VERSION = 0x%08x\n", version);
if (version == 0u || version == 0xffffffffu) {
std::fprintf(stderr,
"ERROR: AXI read failed. Check base address 0x%08llx and bitstream.\n",
static_cast<unsigned long long>(base_addr));
return false;
}
return true;
}
// 将时间值向上对齐到指定步长。
static std::uint64_t AlignUp(std::uint64_t value, std::uint64_t step)
{
// 把时间向上对齐到 PL tick,避免写入 PL 无法表达的非整数 tick 时间。
return ((value + step - 1u) / step) * step;
}
// 计算从机接收时间与主机发送时间的相对差值。
static std::int64_t CalculateSlaveMasterDiffNs(std::uint64_t local_rx_ns,
std::uint64_t master_tx_ns)
{
// 当前调试定义:
// slave_master_diff_ns = 从机 PL 接收时间戳 - 主机发送时间戳
//
// 注意:主机 CLOCK_MONOTONIC 和从机 PL time_ns 的零点不同,所以这个值的绝对值
// 没有物理意义;它的中位数/抖动更适合用来观察同步链路是否稳定。
const std::int64_t raw_diff_ns =
static_cast<std::int64_t>(local_rx_ns) -
static_cast<std::int64_t>(master_tx_ns);
if (!g_timestamp_diff_base_valid) {
g_timestamp_diff_base_valid = true;
g_timestamp_diff_base_ns = raw_diff_ns;
}
return raw_diff_ns - g_timestamp_diff_base_ns;
}
// 将纳秒转换成微秒浮点值,便于日志显示。
static double NsToUs(std::int64_t value_ns)
{
return static_cast<double>(value_ns) / 1000.0;
}
// 把新的主从时间差样本写入环形历史缓冲。
static void PushSlaveMasterDiffNs(std::int64_t diff_ns)
{
// 环形写入大数组,满了以后覆盖最旧样本。中位数不关心样本顺序。
g_timestamp_diff_history[g_timestamp_diff_write_index] = diff_ns;
g_timestamp_diff_write_index =
(g_timestamp_diff_write_index + 1u) % kTimestampDiffHistorySize;
if (g_timestamp_diff_count < kTimestampDiffHistorySize) {
++g_timestamp_diff_count;
}
}
// 计算当前主从时间差样本的中位数。
static std::int64_t GetSlaveMasterDiffMedianNs()
{
if (g_timestamp_diff_count == 0u) {
return 0;
}
for (std::size_t i = 0u; i < g_timestamp_diff_count; ++i) {
g_timestamp_diff_sort_buffer[i] = g_timestamp_diff_history[i];
}
std::sort(g_timestamp_diff_sort_buffer,
g_timestamp_diff_sort_buffer + g_timestamp_diff_count);
const std::size_t mid = g_timestamp_diff_count / 2u;
if ((g_timestamp_diff_count & 1u) != 0u) {
return g_timestamp_diff_sort_buffer[mid];
}
const std::int64_t lower = g_timestamp_diff_sort_buffer[mid - 1u];
const std::int64_t upper = g_timestamp_diff_sort_buffer[mid];
return lower + (upper - lower) / 2;
}
// 将主机时间域的 next_edge_ns 换算成从机 PL 时间域。
static std::uint64_t CalculateLocalNextEdgeNs(const SyncFrame &frame,
std::uint64_t local_rx_ns,
std::int64_t eth_fixed_delay_ns)
{
// 主机包里给的 pulse 周期优先;如果为 0,则使用默认 1ms。
const std::uint64_t pulse_period_ns =
frame.pulse_period_ns != 0u ? frame.pulse_period_ns : kDefaultPulsePeriodNs;
// offset_ns 表示"主机时间域 - 从机 PL 时间域"的估计偏移:
//
// 主机发包时刻:master_tx_ns
// 估计到达从机:master_tx_ns + eth_fixed_delay_ns
// 从机实际收包时刻:local_rx_ns,来自 PL time_ns
//
// 所以:
// offset_ns = 估计主机到达时刻 - 从机 PL 到达时刻
//
// 后面要把主机时间域的 next_edge_ns 转换到从机 PL 时间域:
// local_next_edge_ns = master_next_edge_ns - offset_ns
const std::int64_t offset_ns =
static_cast<std::int64_t>(frame.master_tx_ns) +
eth_fixed_delay_ns -
static_cast<std::int64_t>(local_rx_ns);
std::int64_t local_next_edge_ns =
static_cast<std::int64_t>(frame.next_edge_ns) - offset_ns;
// 如果算出来的脉冲时刻已经过去,或者离当前太近,就按 pulse 周期向后推。
// 这样给 PS 写寄存器和 PL 应用命令留出安全余量。
const std::int64_t min_next_edge_ns =
static_cast<std::int64_t>(local_rx_ns + kMinScheduleAheadNs);
while (local_next_edge_ns < min_next_edge_ns) {
local_next_edge_ns += static_cast<std::int64_t>(pulse_period_ns);
}
return AlignUp(static_cast<std::uint64_t>(local_next_edge_ns), kPlTickNs);
}
// 打开并绑定 UDP 同步监听 socket。
static int OpenSyncSocket(std::uint16_t listen_port)
{
// UDP socket:从机不需要填写主机 IP,直接绑定 INADDR_ANY,谁发来就收谁。
int socket_fd = socket(AF_INET, SOCK_DGRAM, IPPROTO_UDP);
if (socket_fd < 0) {
std::fprintf(stderr, "socket failed: %s\n", std::strerror(errno));
return -1;
}
int reuse = 1;
if (setsockopt(socket_fd, SOL_SOCKET, SO_REUSEADDR, &reuse, sizeof(reuse)) < 0) {
std::fprintf(stderr, "setsockopt SO_REUSEADDR failed: %s\n", std::strerror(errno));
close(socket_fd);
return -1;
}
struct sockaddr_in listen_addr;
std::memset(&listen_addr, 0, sizeof(listen_addr));
listen_addr.sin_family = AF_INET;
listen_addr.sin_addr.s_addr = htonl(INADDR_ANY);
listen_addr.sin_port = htons(listen_port);
if (bind(socket_fd,
reinterpret_cast<const struct sockaddr *>(&listen_addr),
sizeof(listen_addr)) < 0) {
std::fprintf(stderr, "bind port %u failed: %s\n", listen_port, std::strerror(errno));
close(socket_fd);
return -1;
}
return socket_fd;
}
// 将 IPv4 地址转换成可打印字符串。
static const char *AddressToText(const struct sockaddr_in &address, char *buffer, std::size_t size)
{
const char *text = inet_ntop(AF_INET, &address.sin_addr, buffer, size);
return text != NULL ? text : "unknown";
}
// 打印命令行参数用法和默认值。
static void PrintUsage(const char *program_name)
{
std::fprintf(stderr,
"Usage: %s [base_addr] [sync_port] [eth_fixed_delay_ns]\n",
program_name);
std::fprintf(stderr,
"Default: base_addr=0x%08llx sync_port=%u eth_fixed_delay_ns=%lld\n",
static_cast<unsigned long long>(kDefaultNsSyncBaseAddr),
kDefaultSyncPort,
static_cast<long long>(kDefaultEthFixedDelayNs));
}
// 程序入口:初始化 PL、监听 UDP 同步包,并持续更新 pulse_out 对齐时刻。
int main(int argc, char **argv)
{
// 运行参数:
// argv[1] = PL AXI-Lite 基地址,例如 0x43C00000
// argv[2] = UDP 监听端口,例如 5005
// argv[3] = 固定单向链路延时 d,单位 ns,例如 95000
std::uintptr_t base_addr = kDefaultNsSyncBaseAddr;
std::uint16_t sync_port = kDefaultSyncPort;
std::int64_t eth_fixed_delay_ns = kDefaultEthFixedDelayNs;
if (argc > 4) {
PrintUsage(argv[0]);
return 2;
}
if (argc >= 2 && !ParseBaseAddress(argv[1], &base_addr)) {
std::fprintf(stderr, "Invalid base address: %s\n", argv[1]);
return 2;
}
if (argc >= 3 && !ParseU16(argv[2], &sync_port)) {
std::fprintf(stderr, "Invalid sync port: %s\n", argv[2]);
return 2;
}
if (argc >= 4 && !ParseI64(argv[3], ð_fixed_delay_ns)) {
std::fprintf(stderr, "Invalid eth_fixed_delay_ns: %s\n", argv[3]);
return 2;
}
std::signal(SIGINT, HandleStopSignal);
std::signal(SIGTERM, HandleStopSignal);
std::printf("\n=== ns_sync_pulse Linux UDP sync slave ===\n");
std::printf("BASE = 0x%08llx\n", static_cast<unsigned long long>(base_addr));
std::printf("sync_port = %u\n", sync_port);
std::printf("eth_fixed_delay_ns = %lld\n", static_cast<long long>(eth_fixed_delay_ns));
DevMemMap registers;
if (!registers.Open(base_addr, kRegisterSpanBytes)) {
return 1;
}
// 先确认 AXI-Lite 能读通,避免后面一直等 UDP 但其实 PL 地址是错的。
if (!CheckVersion(registers, base_addr)) {
return 1;
}
// 打开 UDP 监听 socket。从机端不需要指定主机 IP。
Fd sync_socket(OpenSyncSocket(sync_port));
if (sync_socket.get() < 0) {
return 1;
}
std::uint32_t debug_state = 0u;
// 先开启 PL 计数器,让 64 位 time_ns 开始运行。
registers.Write32(kRegControl, kControlCounterEnable);
usleep(1000);
// 即使没有主站,也要让从站本地输出 1kHz pulse_out。
// 做法:
// 1. 读取当前 PL time_ns。
// 2. 把第一次脉冲安排到当前时间之后至少 1ms,避免刚写完就过期。
// 3. 写入 NEXT_EDGE_CFG_LOW/HIGH 并提交给 PL。
// 4. 打开 pulse_enable,之后 PL 会自动每 1ms 递增 next_edge_ns,形成 1kHz。
//
// 后续如果收到主站 UDP 同步包,PS 会重新计算 local_next_edge_ns 并写入 PL,
// 从而把这个本地 1kHz 脉冲拉到主站同步节奏上。
const std::uint64_t startup_time_ns = ReadTimeNs(®isters);
const std::uint64_t startup_first_edge_ns =
AlignUp(startup_time_ns + kMinScheduleAheadNs, kPlTickNs);
WriteNextEdgeNs(®isters, startup_first_edge_ns);
registers.Write32(kRegControl,
kControlCounterEnable |
kControlPulseEnable |
debug_state);
PrintU64("time_ns", startup_time_ns);
PrintU64("free_run_first_edge_ns", startup_first_edge_ns);
DumpStatus(registers);
std::printf("Local 1kHz pulse_out is running before master sync.\n");
std::printf("Waiting for UDP SyncFrame on 0.0.0.0:%u.\n", sync_port);
std::printf("Press Ctrl+C to stop.\n");
bool seq_inited = false;
std::uint32_t last_seq = 0;
std::uint64_t accepted_count = 0;
std::uint64_t last_log_ns = 0;
// 调试 IO 的下一次翻转时刻,使用 PL time_ns,而不是 Linux 时间。
std::uint64_t next_debug_toggle_ns = ReadTimeNs(®isters) + kDebugTogglePeriodNs;
while (!g_stop_requested) {
// 用 poll 等 UDP 包,同时每 10ms 醒一次处理 ps_debug_out 翻转。
struct pollfd poll_fd;
poll_fd.fd = sync_socket.get();
poll_fd.events = POLLIN;
poll_fd.revents = 0;
const int poll_result = poll(&poll_fd, 1, kIdlePollTimeoutMs);
if (poll_result < 0) {
if (errno == EINTR) {
continue;
}
std::fprintf(stderr, "poll failed: %s\n", std::strerror(errno));
break;
}
if (poll_result > 0 && (poll_fd.revents & POLLIN)) {
std::uint8_t packet[kSyncFrameWireSize];
struct sockaddr_in master_addr;
socklen_t master_len = sizeof(master_addr);
// 收 UDP 包。注意:recvfrom 返回后马上读 PL time_ns,减少软件延迟不确定性。
const ssize_t received = recvfrom(sync_socket.get(),
packet,
sizeof(packet),
0,
reinterpret_cast<struct sockaddr *>(&master_addr),
&master_len);
// 这是同步计算里最重要的从机时间戳:来自 PL 64 位 time_ns。
const std::uint64_t local_rx_ns = ReadTimeNs(®isters);
if (received == static_cast<ssize_t>(sizeof(packet))) {
const SyncFrame frame = DecodeSyncFrame(packet);
// 丢弃非法包、旧包、乱序包。UDP 本身不保证顺序。
if (IsValidSyncFrame(frame) &&
(!seq_inited || frame.seq > last_seq)) {
// 把主机时间域的 next_edge_ns 换算成从机 PL 时间域的 local_next_edge_ns。
const std::uint64_t local_next_edge_ns =
CalculateLocalNextEdgeNs(frame, local_rx_ns, eth_fixed_delay_ns);
// 写入 PL。PL 之后会在 local_next_edge_ns 时刻输出 pulse_out。
WriteNextEdgeNs(®isters, local_next_edge_ns);
// 使能 counter 和 pulse,保留当前 ps_debug_out 状态。
registers.Write32(kRegControl,
kControlCounterEnable |
kControlPulseEnable |
debug_state);
seq_inited = true;
last_seq = frame.seq;
++accepted_count;
const std::int64_t slave_master_diff_ns =
CalculateSlaveMasterDiffNs(local_rx_ns, frame.master_tx_ns);
PushSlaveMasterDiffNs(slave_master_diff_ns);
// 日志不用每包打印,否则 30ms 一包会刷太多;这里按 PL 时间约 1 秒打印一次。
if (accepted_count == 1u || local_rx_ns - last_log_ns >= kLogPeriodNs) {
char ip_text[INET_ADDRSTRLEN];
// 这里重新算 offset_ns 只为了打印,核心计算在 CalculateLocalNextEdgeNs()。
const std::int64_t offset_ns =
static_cast<std::int64_t>(frame.master_tx_ns) +
eth_fixed_delay_ns -
static_cast<std::int64_t>(local_rx_ns);
const std::int64_t slave_master_diff_median_ns =
GetSlaveMasterDiffMedianNs();
std::printf("sync=%llu from=%s seq=%u local_rx_ns=%llu master_tx_ns=%llu slave_master_diff_us=%.3f slave_master_diff_median_us=%.3f diff_samples=%u offset_ns=%lld local_next_edge_ns=%llu active_edge_ns=%llu\n",
static_cast<unsigned long long>(accepted_count),
AddressToText(master_addr, ip_text, sizeof(ip_text)),
frame.seq,
static_cast<unsigned long long>(local_rx_ns),
static_cast<unsigned long long>(frame.master_tx_ns),
NsToUs(slave_master_diff_ns),
NsToUs(slave_master_diff_median_ns),
static_cast<unsigned int>(g_timestamp_diff_count),
static_cast<long long>(offset_ns),
static_cast<unsigned long long>(local_next_edge_ns),
static_cast<unsigned long long>(ReadActiveEdgeNs(registers)));
last_log_ns = local_rx_ns;
}
}
}
}
// 用 PL 时间驱动 ps_debug_out,每 500ms 翻转一次,方便示波器/ILA 看 PS 还活着。
const std::uint64_t now_pl_ns = ReadTimeNs(®isters);
while (now_pl_ns >= next_debug_toggle_ns) {
debug_state ^= kControlPsDebugOut;
registers.Write32(kRegControl,
kControlCounterEnable |
kControlPulseEnable |
debug_state);
next_debug_toggle_ns += kDebugTogglePeriodNs;
}
}
// 退出时关闭 pulse_out 和 ps_debug_out,但保留 counter_enable,方便继续读 PL 时间。
registers.Write32(kRegControl, kControlCounterEnable);
std::printf("Stopped. pulse_out disabled, ps_debug_out cleared, counter left enabled.\n");
return 0;
}MakeFile
bash
# Petalinux cross compile config.
# Change PETA_PATH if Petalinux is installed somewhere else.
PETA_PATH ?= /opt/petalinux/2020.2
PETA_SYSROOT_X86 := $(PETA_PATH)/sysroots/x86_64-petalinux-linux
PETA_SYSROOT_ARM := $(PETA_PATH)/sysroots/cortexa9t2hf-neon-xilinx-linux-gnueabi
CROSS_COMPILE ?= $(PETA_SYSROOT_X86)/usr/bin/arm-xilinx-linux-gnueabi/arm-xilinx-linux-gnueabi-
override CC := $(CROSS_COMPILE)gcc
override CXX := $(CROSS_COMPILE)g++
COMMON_FLAGS := -Wall -g -Isrc/include \
-mthumb -mfpu=neon -mfloat-abi=hard -mcpu=cortex-a9 \
--sysroot=$(PETA_SYSROOT_ARM)
# Petalinux/Yocto environments often export CFLAGS/CXXFLAGS in advance.
# Force-append sysroot and CPU flags, otherwise target headers such as arpa/inet.h may be missing.
override CFLAGS += $(COMMON_FLAGS)
override CXXFLAGS += $(COMMON_FLAGS) -std=c++11
override LDFLAGS += --sysroot=$(PETA_SYSROOT_ARM) -lm -lpthread -ldl -lrt
TARGET ?= ns_sync_test
BUILD_DIR ?= build
OBJ_DIR ?= $(BUILD_DIR)/obj
SRCS := $(wildcard src/*.c src/*/*.c)
CXX_SRCS := $(wildcard src/*.cpp src/*/*.cpp)
OBJS := $(patsubst %.c,$(OBJ_DIR)/%.o,$(SRCS))
CXX_OBJS := $(patsubst %.cpp,$(OBJ_DIR)/%.o,$(CXX_SRCS))
.PHONY: all clean install run
all: $(BUILD_DIR)/$(TARGET)
$(BUILD_DIR) $(OBJ_DIR):
mkdir -p $@
$(BUILD_DIR)/$(TARGET): $(OBJS) $(CXX_OBJS) | $(BUILD_DIR)
$(CXX) $(CXXFLAGS) $^ -o $@ $(LDFLAGS)
$(OBJ_DIR)/%.o: %.c | $(OBJ_DIR)
mkdir -p $(dir $@)
$(CC) $(CFLAGS) -c $< -o $@
$(OBJ_DIR)/%.o: %.cpp | $(OBJ_DIR)
mkdir -p $(dir $@)
$(CXX) $(CXXFLAGS) -c $< -o $@
run: $(BUILD_DIR)/$(TARGET)
sudo ./$(BUILD_DIR)/$(TARGET)
clean:
rm -rf $(BUILD_DIR)主机打印
bash
root@ant:~# ./udp_sync_master_petalinux
UDP sync master sending to 255.255.255.255:5005 every 30 ms
Pulse period: 1000000 ns (1000 Hz if period divides 1s)
Frame: magic=0x4a42 version=1 size=32 bytes
Master clock: PC Linux CLOCK_MONOTONIC
Press Ctrl+C to stop.
sent=1 seq=0 master_tx_ns=1880106897508 next_edge_ns=1880107000000 pulse_period_ns=1000000
sent=35 seq=34 master_tx_ns=1881126886690 next_edge_ns=1881127000000 pulse_period_ns=1000000
sent=69 seq=68 master_tx_ns=1882146886753 next_edge_ns=1882147000000 pulse_period_ns=1000000
sent=103 seq=102 master_tx_ns=1883166886743 next_edge_ns=1883167000000 pulse_period_ns=1000000
sent=137 seq=136 master_tx_ns=1884186886273 next_edge_ns=1884187000000 pulse_period_ns=1000000
sent=171 seq=170 master_tx_ns=1885206887006 next_edge_ns=1885207000000 pulse_period_ns=1000000
sent=205 seq=204 master_tx_ns=1886226886568 next_edge_ns=1886227000000 pulse_period_ns=1000000
sent=239 seq=238 master_tx_ns=1887246897120 next_edge_ns=1887247000000 pulse_period_ns=1000000从机打印
slave_master_diff_median_us 是过去100个包的主从时差中位数
因为
bash
root@ant:~# ./ns_sync_test
=== ns_sync_pulse Linux UDP sync slave ===
BASE = 0x43c00000
sync_port = 5005
eth_fixed_delay_ns = 95000
VERSION = 0x00020000
time_ns = 0x00000000_00108ed4 (1 ms)
free_run_first_edge_ns = 0x00000000_001fd114 (2 ms)
STATUS = 0x0000001e pulse_out=0 counter_en=1 pulse_en=1 latch_valid=1 next_edge_valid=1 ps_debug_out=0
Local 1kHz pulse_out is running before master sync.
Waiting for UDP SyncFrame on 0.0.0.0:5005.
Press Ctrl+C to stop.
sync=1 from=192.168.3.211 seq=0 local_rx_ns=9174208210 master_tx_ns=1880106897508 slave_master_diff_us=0.000 slave_master_diff_median_us=0.000 diff_samples=1 odge_ns=9175215710 active_edge_ns=9175215710
sync=35 from=192.168.3.211 seq=34 local_rx_ns=10194070710 master_tx_ns=1881126886690 slave_master_diff_us=-126.682 slave_master_diff_median_us=-145.235 diff_sacal_next_edge_ns=10195089020 active_edge_ns=10195089020
sync=69 from=192.168.3.211 seq=68 local_rx_ns=11214074510 master_tx_ns=1882146886753 slave_master_diff_us=-122.945 slave_master_diff_median_us=-140.124 diff_sacal_next_edge_ns=11215092760 active_edge_ns=11215092760
sync=103 from=192.168.3.211 seq=102 local_rx_ns=12234083420 master_tx_ns=1883166886743 slave_master_diff_us=-114.025 slave_master_diff_median_us=-134.330 diff_ local_next_edge_ns=12235101680 active_edge_ns=12235101680
sync=137 from=192.168.3.211 seq=136 local_rx_ns=13254092390 master_tx_ns=1884186886273 slave_master_diff_us=-104.585 slave_master_diff_median_us=-127.966 diff_ local_next_edge_ns=13255111120 active_edge_ns=13255111120
sync=171 from=192.168.3.211 seq=170 local_rx_ns=14274105430 master_tx_ns=1885206887006 slave_master_diff_us=-92.278 slave_master_diff_median_us=-117.062 diff_slocal_next_edge_ns=14275123430 active_edge_ns=14275123430
sync=205 from=192.168.3.211 seq=204 local_rx_ns=15294107260 master_tx_ns=1886226886568 slave_master_diff_us=-90.010 slave_master_diff_median_us=-108.252 diff_slocal_next_edge_ns=15295125700 active_edge_ns=15295125700
sync=239 from=192.168.3.211 seq=238 local_rx_ns=16314165500 master_tx_ns=1887246897120 slave_master_diff_us=-42.322 slave_master_diff_median_us=-99.796 diff_saocal_next_edge_ns=16315173380 active_edge_ns=16315173380
^CStopped. pulse_out disabled, ps_debug_out cleared, counter left enabled.